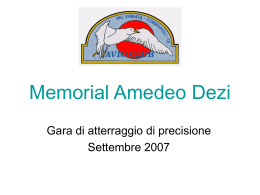
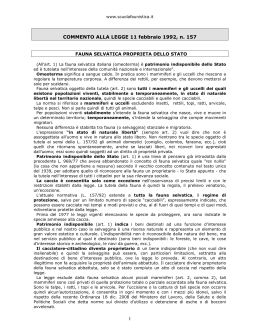
getto didattica in re progetto didattica in rete Lezioni di Topografia Parte III - Strumenti e metodi di misura A. Manzino Dipartimento di Georisorse e Territorio Politecnico di Torino, dicembre 2000 otto editore DISPENSE DI TOPOGRAFIA PARTE III – STRUMENTI E METODI DI MISURA A. MANZINO Otto Editore P.zza Vittorio Veneto 14 – 10123 Torino www.otto.to.it INDICE PARTE TERZA – STRUMENTI E METODI DI MISURA 9. STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE...1 9.1 PREMESSE SU ANGOLI AZIMUTALI, DISTANZE ZENITALI E DISLIVELLI.......1 9.2 SCHEMA TEORICO DI FUNZIONAMENTO DEL TEODOLITE..................2 9.3 MESSA IN STAZIONE DI UN TEODOLITE ................................................3 Resa verticale dell'asse primario del teodolite ..........................................3 Messa in stazione: il treppiede .................................................................5 Messa in stazione: il piombino a gravità, il piombino ottico ed il centramento forzato...........................................................................................5 9.4 MEZZI E GLI ORGANI DI COLLIMAZIONE ...............................................6 9.5 MEZZI TRADIZIONALI PER LA LETTURA GONIOMETRICA AI CERCHI .......9 9.6 MEZZI PER APPREZZARE PICCOLI INTERVALLI DI GRADUAZIONE ......... 10 9.7 CONDIZIONI E MEZZI DI RETTIFICA DI UN TEODOLITE ................... 14 Condizioni intrinseche di rettifica ........................................................ 14 Gli errori che influenzano le letture azimutali...................................... 15 Errore di inclinazione, collimazione, verticalità ed eccentricità............ 15 Errori di graduazione dei cerchi............................................................ 18 La misura degli angoli zenitali .............................................................. 19 Il cannocchiale astronomico ....................................................................6 Il cannocchiale anallattico........................................................................7 Caratteristiche di un cannocchiale...........................................................7 Le mire .....................................................................................................8 i Gli errori che influenzano le letture zenitali ......................................... 20 I compensatori: il compensatore automatico del cerchio verticale, i compensatori dei cerchi azimutali ............................................................... 21 9.8 TEODOLITI ELETTRONICI, LE STAZIONI TOTALI E LE STAZIONI INTEGRATE ........................................................................................... 23 Princìpî di misura dei teodoliti elettronici............................................ 23 La lettura assoluta.................................................................................. 24 I principi di funzionamento del metodo di lettura incrementale ........ 26 I metodi adottati dalle principali case costruttrici ................................ 27 10. LIVELLAZIONI ............................................................................32 10.1 PREMESSA.............................................................................................. 32 10.2 I VARI TIPI DI LIVELLAZIONE................................................................ 32 Livellazioni indipendenti dalla distanza................................................ 33 Livellazioni dipendenti dalla distanza................................................... 33 10.3 LA LIVELLAZIONE GEOMETRICA.......................................................... 33 La livellazione geometrica dal mezzo.................................................... 35 Errori di curvatura e di rifrazione ......................................................... 36 La livellazione geometrica da un estremo............................................. 38 La livellazione geometrica reciproca ..................................................... 38 Le livellazioni geometriche di precisione .............................................. 39 10.4 LE STADIE............................................................................................. 41 10.5 AUTOLIVELLI ....................................................................................... 44 10.6 LIVELLI ELETTRONICI .......................................................................... 45 10.7 IL CODICE BINARIO .............................................................................. 49 10.8 CALCOLO DELL'ERRORE DI SRETTIFICA E RETTIFICA DI UN LIVELLO.... 50 10.9 LA LIVELLAZIONE TRIGONOMETRICA................................................. 51 Livellazione trigonometrica da un solo estremo.................................. 53 Livellazione reciproca simultanea in presenza della rifrazione.............. 54 Come si ricava l'indice di rifrazione K da misure reciproche.............. 55 Precisione della livellazione trigonometrica.......................................... 56 10.10 LA LIVELLAZIONE ECCLIMETRICA UTILIZZANDO TEODOLITE E DISTANZIOMETRO ................................................................................ 57 Precisione della livellazione ecclimetrica............................................... 58 10.11 INSERIMENTO DI UNA DISTANZA MISURATA IN CARTOGRAFIA ........ 59 10.12 INSERIMENTO DI UNA DISTANZA MISURATA NOTE LE QUOTE DEI DUE ESTREMI ................................................................................................ 62 ii 11. LA MISURA DIRETTA DELLA DISTANZA...........................63 11.1 I DISTANZIOMETRI (EDM/EODM)................................................... 63 La misura delle distanze con i distanziometri ad onde........................ 63 I distanziometri elettro ottici EODM .................................................. 64 Il metodo della misura della fase........................................................... 64 Precisione degli EDM........................................................................... 66 Misura delle ambiguità n con due frequenze vicine negli EODM..... 67 Misura dell’ambiguità n col metodo delle decadi ................................ 68 Misura dell’ambiguità con due frequenze prossime e la terza maggiore.... 69 L’onda portante e l’onda modulante.................................................... 69 Operazioni sulle onde ricevute e trasmesse........................................... 70 Precisione degli EODM ....................................................................... 71 Il Mekometro Kern ME5000 .............................................................. 72 Il metodo della misura ad impulsi........................................................ 72 11.2 I PRISMI ................................................................................................. 75 L’influenza della rifrazione atmosferica negli EDM............................. 76 12. METODI DI RILEVAMENTO E SCHEMI DI MISURA......78 12.1 LA RETE DI INQUADRAMENTO NAZIONALE ....................................... 79 12.2 RILIEVO DI INQUADRAMENTO, DI INFITTIMENTO, DI DETTAGLIO ...... 83 12.3 STRUMENTI E SCHEMI DI RILIEVO ...................................................... 85 La strumentazione GPS........................................................................ 85 Schemi di reti GPS .............................................................................. 87 Teodoliti EODM, Stazioni totali......................................................... 90 Misure con nastri, misure di allineamento, misure con squadri.......... 93 Gli allineamenti .................................................................................... 94 Misure con squadri ............................................................................... 97 Gli schemi di inquadramento ed infittimento altimetrico................... 98 12.4 I PROGRAMMI DI PROGETTO E COMPENSAZIONE DI RETI GEODETICHE ....................................................................................... 99 La separazione della planimetria dall’altimetria.................................. 100 Reti planimetriche: carte di Gauss o piano topografico..................... 101 Reti: equazioni generatrici e compensazione minimi quadrati .......... 102 Compensazione e progetto: valori in ingresso ed uscita..................... 103 Reti: il sistema di riferimento (datum) ............................................... 104 Equazioni generatrici di una rete planimetrica................................... 105 Distanza dij ........................................................................................ 106 Azimut ϑ ij ......................................................................................... 107 Direzioni azimutali tij ........................................................................ 108 Angoli azimutali α ijk ......................................................................... 109 Allineamenti e distanze lungo un allineamento ................................. 110 Esempio di calcolo e compensazione di una rete planimetrica.......... 112 Tabulato di uscita di CALGE ............................................................ 118 iii PARTE III – STRUMENTI E METODI DI MISURA 9. STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE 9.1 PREMESSE SU ANGOLI AZIMUTALI, DISTANZE ZENITALI E DISLIVELLI Si definisce angolo azimutale AÔB la sezione normale dell'angolo diedro formato dai due piani del fascio che ha per generatrice la verticale n per O e passanti per A e B (vedi fig. 9.1). A B n z(A) 0 Fig. 9.1 – Definizione di angoli azimutali distanze zenitali e dislivelli. 1 Si definisce distanza zenitale del punto A, l'angolo Z(A ) appartenente al piano verticale passante per O ed A definito dalla verticale n e dal vettore OA. Dicesi distanza reale OA la lunghezza del segmento di retta che congiunge due punti O ed A, mentre dicesi distanza topografica o distanza, la lunghezza dell'arco di geodetica sulla superficie di riferimento che unisce i due punti. Dicesi infine dislivello ∆ OA la differenza di quota tra il punto A ed il punto O (dislivelli e quote ove non specificato sono da intendersi ortometrici). 9.2 SCHEMA TEORICO DI FUNZIONAMENTO DEL TEODOLITE Per la misura di angoli azimutali e delle distanze zenitali si utilizzano goniometri particolari denominati teodoliti, lo schema del teodolite è visibile in figura 9.2. Il sistema di funzionamento di questi strumenti è di tipo meccanico, il sistema di lettura dei cerchi può essere ottico e/o elettronico. La prima operazione che è possibile compiere è rendere verticale (diretto secondo n) l'asse di rotazione a 1, od asse primario, attorno a cui ruota un supporto ad «U» detto alidada. Fra i bracci dell'alidada è incernierato il cannocchiale ruotante attorno all'asse secondario a 2. Si definisce infine asse di collimazione a 3 l'asse congiungente il centro del reticolo, (che è l'organo che permette il puntamento di un particolare) col punto nodale interno del sistema obbiettivo. Fig. 9.2 – Schema di un teodolite tradizionale. 2 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE A strumento rettificato questi assi devono essere a due a due perpendicolari fra loro; l'intersezione ideale di questi assi definisce il cosiddetto centro strumentale. Come detto, l'ipotesi di base è poter rendere verticale l'asse primario, ciò si realizza attraverso due strumenti: la livella sferica e la livella torica raggiungendo il risultato con media approssimazione con la prima ed affinando di molto il risultato con la seconda. La livella torica è solidale all'alidada. 9.3 MESSA IN STAZIONE DI UN TEODOLITE La messa in stazione di un teodolite si attua con queste due operazioni: – resa verticale dell'asse primario – far si che l'asse primario passi per il punto materializzato a terra (il punto O di fig. 9.1). Resa verticale dell'asse primario del teodolite L'alidada ruota sulla base del teodolite, entro la quale è contenuto il cerchio graduato per le osservazioni azimutali. Alcune volte la base è costituita da un corpo unico che viene fissato al treppiede attraverso una robusta vite, in altri casi, mediante un aggancio a baionetta con tre perni è fissata alla basetta (fig. 9.2) detta anche tricuspide di base. La basetta del teodolite è dotata di tre viti dette viti di base, poste sui vertici di un triangolo equilatero, al centro di questo triangolo vi è un dispositivo ottico (piombino ottico) che permette la collimazione di un riferimento nella direzione nadirale dell'asse primario. Attraverso le tre viti o razze di base è possibile rendere verticale l'asse a 1. Per raggiungere lo scopo prefisso, si parte col rendere orizzontale il piano normale ad a 1, ciò si realizza rendendo orizzontali due rette perpendicolari, appartenenti a questo piano. Per rendere orizzontale un asse si sfrutta uno strumento semplice detto livella torica. La livella torica è una fiala di vetro con la superficie interna toroidale entro la quale è contenuto per gran parte liquido a bassa viscosità (etere od alcool ad esempio) e basso punto di congelamento. Il pelo libero tra il liquido ed i suoi vapori (bolla) si dispone normalmente alla linea di forza di gravità passante per la livella, la tangente al centro della bolla si dispone dunque sempre orizzontale. li -3 A -2 la -1 0 1 2 3 V B Fig. 9.3 – La livella torica. 3 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Sulla fiala è tracciata una graduazione divisa in genere ogni due mm. La tangente alla superficie torica nel punto di mezzo della graduazione è detta tangente centrale. Condizione di rettifica della livella è che quando la retta AB (in fig. 9.3 idealizza una direzione del piano di appoggio) è orizzontale, la lettura alla tangente centrale sia uguale a zero. Tale lettura è ottenuta facendo la media delle letture ai due peli liberi del liquido ( li e la ) . È detta sensibilità della livella, l'angolo di cui la si deve ruotare sulla sua linea d'appoggio affinché la bolla si sposti di 1 mm. Tale sensibilità, nei teodoliti di buona precisione, è attorno ai 10". Se la condizione di rettifica non è verificata è possibile imporla ruotando opportunamente la vite di rettifica V. Si osservi la figura 9.4a: se la direzione di appoggio della livella è inclinata di un angolo ν , rispetto all'orizzontale, è possibile che la lettura alla bolla sia ugualmente zero solo nel caso che l'errore di srettifica sia dello stesso valore e di segno contrario. Ruotando la livella attorno all'asse r, che prima era verticale e formante un angolo ν con la direzione AB, il pelo libero del liquido ruota di un angolo di grandezza (ν +ν ) e pari alla lettura l (fig. 9.4b). l=0 tg centrale l=0 / r v A v B A v C D C B D Fig. 9.4a - 9.4b Per rettificare la livella è sufficiente a questo punto agire sulla vite di rettifica sino a compiere la lettura l ⁄ 2 . C 2 razze di base 3 A 1 B Fig. 9.5 – Disposizioni della livella per rendere orizzontale un piano. 4 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Per rendere verticale l'asse primario occorre dunque eseguire queste operazioni: 1. si esegue la lettura zero sulla livella torica (si centra); quando questa è parallela a due razze di base (posizione 1 in fig. 9.5) con l'uso delle viti A e B; 2. si verifica la condizione di rettifica ruotando di π l'alidada: la livella assume la posizione 2 della figura 9.5; se necessario si rettifica; 3. Si porta la livella in direzione perpendicolare alle razze già utilizzate (posizione 3) e si centra ancora la bolla con la vite C. Queste operazioni si eseguono iterativamente in genere due o tre volte sino a raggiungere un centramento della bolla soddisfacente in tutte le direzioni. Durante il primo passo si agisce di solito su entrambe le viti A e B con rotazioni di uguale misura e contrarie in segno. Se è necessaria una rettifica si agisce per i motivi già indicati per metà sulla vite di rettifica e per metà ruotando le viti A e B, infine, per il terzo passo, si agisce sulla vite C, o sulle A e B se la vite C fosse già a fondo corsa, ma, in questo caso in una stessa direzione di rotazione. Messa in stazione: il treppiede Il treppiede, di legno o metallico, permette l'appoggio dello strumento sul piatto situato sulla testa metallica, ove convergono le tre gambe solitamente di estensione regolabile. La testa metallica ha un foro circolare di qualche cm di diametro che permette il passaggio di una vite (vite di fermo) che ha una certa escursione all'interno del foro e consente, a contrasto, l'aggancio al sovrastante teodolite. Il treppiede si utilizza nei rilievi nei quali non sia richiesta una altissima precisione. In altri casi infatti si preferisce costruire appositi pilastrini in cemento armato sui quali appoggia una piastra di acciaio opportunamente sagomata, sulla quale a centraggio forzato, si innesta il teodolite. Messa in stazione: il piombino a gravità, il piombino ottico ed il centramento forzato La testa del treppiede è opportuno che venga posta approssimativamente orizzontale poiché le viti calanti del teodolite hanno un'escursione limitata a pochi cm. Per ottenere che la verticale dell'asse primario cada sul punto materializzato a terra, si cerca di traslare adeguatamente il treppiede, prima ad occhio e poi con l'aiuto di un piombino a gravità, innestabile entro la vite di fermo. Per il perfezionamento dell'operazione si può contare, limitatamente a quanto detto sopra, sia sulla variazione della lunghezza delle gambe, sia sull'escursione della vite all'interno del foro sito sulla testa del treppiede. Un buon piombino a gravità consente una accuratezza di centramento dell'ordine di uno o due mm, vento permettendo. La lunghezza del filo è regolabile ed adattabile all'altezza del treppiede. Un miglior centramento sul punto a terra si ottiene attraverso l'uso del piombino ottico, da utilizzare solo quando il piano di rotazione dell'alidata è stato reso orizzontale con discreta precisione. Le operazioni sopra descritte possono richiedere, specie in terreni difficili, parecchi minuti (10 o 15), per cui sono piuttosto onerose nell'economia del lavoro. Da qualche decennio le case costruttrici hanno brevettato dei sistemi per evitarle nel caso si debba rimettere sullo stesso punto lo strumento, o cambiare la posizione di una mira con quella dello strumento. È possibile sconnettere il teodolite dalla 5 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE sottostante base - che era stata resa orizzontale - col semplice giro di una vite laterale o lo scorrimento di una levetta di base. Negli strumenti Leica-Wild, ad esempio, il teodolite, sollevandosi dalla base, evidenzia tre piccoli denti tronco conici di metallo disposti nella parte sottostante a triangolo equilatero che si innestano con le rispettive sedi di alloggio che rimangono sul basamento. Al posto del teodolite si può allora collocare un prisma od una mira, predisposte con gli stessi attacchi. I fori tronco conici consentono un centramento forzato coassiale a quello dello strumento appena tolto, con precisione sub-millimetrica. 9.4 MEZZI E GLI ORGANI DI COLLIMAZIONE Collimare un segnale o un oggetto vuol dire traguardarlo attraverso una linea ideale formata da due punti che, allineati con l'occhio, formano una linea di mira. Si possono osservare particolari più in dettaglio o più distanti se si utilizza un cannocchiale e ciò avviene con l’uso del teodolite. Ciò che si collima può essere un particolare naturale del terreno o di un'opera antropica (campanili, case, piloni ecc.). Più di sovente vengono costruiti appositi segnali, diversi per forma e dimensioni a seconda della distanza dalla stazione, a seconda del tipo di rilievo da eseguire e dell'ambiente di lavoro, chiamati mire o segnali. Il cannocchiale astronomico Il più semplice schema di cannocchiale è quello astronomico di Keplero (o a lunghezza variabile), composto da due lenti chiamate obbiettiva ed oculare. L'oggetto è posto ad una distanza dalla lente obbiettiva molto più grande della distanza focale f 1 della lente stessa. L'immagine che si forma dopo la prima lente è reale, capovolta e rimpicciolita e viene raccolta su un piano materializzato da un vetrino ove vi è inciso un sottile reticolo. La seconda lente oculare ha il compito di ingrandire la prima immagine e, funzionando da microscopio semplice rispetto alla prima immagine, deve essere posta ad una distanza dal reticolo inferiore alla focale f 2 della lente stessa. Fig. 9.6 – Un tradizionale reticolo distanziometrico. 6 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE L'asse individuato dal centro ottico (punto nodale) della lente obbiettiva e dal centro del reticolo prende il nome di asse di collimazione. Tra i molti tipi di reticolo, i più usati sono quelli a croce semplice o a croce con bracci simmetrici (fig. 9.6). L'ingrandimento angolare di un cannocchiale è il rapporto tra la dimensione angolare di un oggetto osservato attraverso il cannocchiale e di quella di come appare osservandolo ad occhio nudo. Indicando con I questo rapporto, si può dimostrare che, in condizioni telescopiche, cioè quando il reticolo e l'oculare sono adattati ad osservare oggetti a distanza infinita vale: I = f1 ⁄ f2 9.1 dove f 1 ed f 2 sono le distanze focali delle lenti obiettiva ed oculare. Il rapporto tra le focali è anche detto ingrandimento normale ed ha valori usuali compresi tra 10 e 40. Il cannocchiale anallattico I moderni cannocchiali differiscono da quello Kepleriano non solo per un'ottica più perfezionata, che riduce di molto le aberrazioni e le distorsioni attraverso l'uso di sistemi di lenti o di accoppiamenti acromatici, ma anche perché sono di lunghezza costante, permettendo la perfetta ermeticità alla polvere e all'umidità, oltre che una migliore precisione meccanica che migliora la stabilità dell'asse di collimazione. La lunghezza costante si ottiene inserendo all'interno una lente divergente mobile che serve per l'adattamento alla distanza, che è quell'operazione per cui si porta l'immagine prodotta dalle lenti obbiettive sul piano del reticolo. Lo spostamento della lente divergente è comandato da una vite esterna laterale che comanda una ghiera coassiale al cannocchiale. L'adattamento alla vista consiste invece nel porre la seconda immagine (virtuale) prodotta dalla lente oculare, ad una distanza, dal nostro occhio, pari a quella della visione distinta, e dovrebbe essere fatto preliminarmente. Siccome l’immagine deve essere a fuoco sul piano del reticolo, è sufficiente ruotare una ghiera che trasla l'oculare sino a che si vede distintamente il reticolo. In generale si dice parallasse l'angolo sotto cui si osserva un oggetto. Nel caso dell'osservazione col cannocchiale dotato di reticoli a croce con bracci simmetrici paralleli al tratto orizzontale, si intende come angolo parallattico l'angolo sotteso dalle due rette ideali formate dai raggi luminosi che partono dall'estremità del reticolo e divergono sino a situarsi su una porzione dell'oggetto. Il punto di convergenza dei predetti raggi doveva collocarsi esternamente al cannocchiale nel caso di lunghezza variabile, mentre si può collocare in un punto, variabile in posizione, ma sempre molto prossimo al centro dello strumento, nel caso di cannocchiale a lunghezza costante. In questo caso il cannocchiale è detto centralmente anallattico. Caratteristiche di un cannocchiale – L'ingrandimento si può misurare anche come rapporto tra due lunghezze. Si definisce così l'ingrandimento lineare E come rapporto tra le dimensioni dell'oggetto e quelle della sua immagine vista col cannocchiale. Si può facilmente dimostrare che: E = 1⁄I 9.2 7 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE – Il potere risolutivo del cannocchiale è corrispondente all'acuità visiva dell'occhio umano, amplificato dell'ingrandimento I. – Il campo del cannocchiale ω, è l'angolo di quel cono che ha come vertice il punto nodale interno della lente obbiettiva e base la circonferenza del diaframma del reticolo. Un cannocchiale con grande campo è apprezzato perché permette di vedere ampie porzioni di territorio. Essendo però ω inversamente proporzionale a f 1, il campo è anche inversamente proporzionale all'ingrandimento I. – La chiarezza del cannocchiale è il rapporto tra la quantità di luce che arriva da un oggetto visto col cannocchiale e la quantità di luce che arriva osservandolo ad occhio nudo. È facile dimostrare che anche la chiarezza è inversamente proporzionale ad I o, per l'esattezza, ad I 2. La collimazione viene fatta verso segnali provvisori o permanenti, prima cercando di dirigere il cannocchiale verso l'oggetto con l'aiuto di un mirino che sta sopra o a fianco del cannocchiale. Quando ad occhio, sembra centrata la direzione, è possibile bloccare prima la rotazione attorno all'asse primario del teodolite e quella del cannocchiale attorno all'asse secondario poi, attraverso due viti, dette viti dei grandi spostamenti. Si cerca quindi, guardando nel cannocchiale, che il particolare sia nel campo e si può perfezionare la collimazione in quanto, a viti dei grandi spostamenti bloccate, due altre viti, dette viti dei piccoli spostamenti, sia azimutali che zenitali, consentono di comandare rotazioni micrometriche. Dette rotazioni si apportano sino a che il centro del reticolo non coincide col centro dell'oggetto collimato. Sembra ovvio sottolineare che occorre curare la perfetta collimazione, per poter poi misurare correttamente gli angoli, ma spesso l'errore che si può commettere non curando una buona collimazione supera di molto quello imputabile all'approssimazione del goniometro. Le mire Come accennato, i punti da collimare possono essere particolari fisici del terreno che ben si prestino ad una individuazione univoca in senso planimetrico, se il problema è la sola individuazione planimetrica, o anche altimetrico, se occorre misurare anche le quote dei punti collimati. Si utilizzano a ciò segnali appositamente costruiti dalle principali case strumentali, diversi a seconda della distanza per la quale sono stati progettati. In casi particolari la collimazione può avvenire anche verso segnali provvisori quali centrini di carta o metallici, mire luminose o colorate, paline ecc. La dimensione del segnale, funzione della distanza, deve essere accuratamente scelta: segnali o mire troppo piccole sono poco visibili, ma se troppo grandi potrebbero permettere una non univoca collimazione. Per questo motivo, per le corte distanze si preferisce collimare verso segnali sottili fatti a «V» od a cerchi concentrici. La dimensione del segnale è così adattabile alla distanza, come lo è l'apertura delle braccia della «V». Sappiamo poi soprattutto che il potere separatore dell'occhio umano, con questo artificio, ne risulta sperimentalmente amplificato di un fattore 4 o 5. Alcune di queste mire sono retroillu- 8 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE minabili. Se non ci sono problemi di luminosità o visibilità atmosferica, la dimensione S del segnale che comincia a vedersi alla distanza d è data da: S = (α d ) I 9.3 ove α è il potere separatore dell'occhio umano in radianti pari circa a π /100 (2 gon) ed I il numero degli ingrandimenti angolari del cannocchiale. (Il potere risolutivo è una misura lineare, il potere separatore è una misura angolare). Per le grandi distanze i problemi di luminosità sono solitamente più influenti di quelli relativi alla dimensione, anche se è evidente che un segnale grande riflette più luce ed è quindi più visibile di un segnale piccolo. In alcuni casi, piuttosto che aumentare le dimensioni del segnale, si preferisce creare una sorgente di luce piccola ma molto intensa, e ben orientata verso chi deve osservarla. L'elioscopio è uno strumento da tempo utilizzato, allo scopo di segnalare i punti trigonometrici per renderli visibili a lunghe distanze. È formato da uno specchietto mobile che viene disposto in modo da riflettere verso l'osservatore i raggi solari. Quando lo specchio è ben diretto, esso appare come una stellina brillante, visibile a decine di km di distanza. Di notte il sistema utilizzato è invece quello dell'arco voltaico o delle lampade ad acetilene che creano sorgenti puntiformi molto luminose. Queste tecniche di misura oggi possono sembrare superate con l’avvento del GPS che non richiede intervisibilità. Per il tracciamento di gallerie o altre opere coperte, il riporto di un azimut è ancora un’operazione che può avvenire con questi mezzi. 9.5 MEZZI TRADIZIONALI PER LA LETTURA GONIOMETRICA AI CERCHI I goniometri all'interno del teodolite sono due: uno situato su un piano che dovrà essere posto orizzontale ed un altro, per conseguenza, che rimarrà su un piano verticale. I centri di questi goniometri dovranno essere gli assi a 1 ed a2. La graduazione è incisa solitamente su una corona circolare di cristallo, racchiusa e quindi nascosta e protetta da un'armatura metallica. I cerchi, essendo protetti dalle intemperie e dai colpi, necessitano di un percorso ottico loro proprio che permetta alla luce di illuminarli per poterli osservare, ottenuto con specchi e prismi. La complessità ottica e meccanica e la precisione di entrambe le funzioni giustificano i costi di questi strumenti, anche di alcune decine di milioni di lire. Nel caso di strumentazione elettronica tuttavia la lettura e la registrazione avvengono senza bisogno che l’operatore osservi otticamente i due cerchi. L'illuminazione dei cerchi di un teodolite tradizionale avviene attraverso un foro laterale entro cui uno specchietto regolabile convoglia la luce solare o quella artificiale. I cerchi di cristallo, di solito del diametro tra i 5 e i 10 cm, vengono divisi in un certo numero n di parti secondo una graduazione che oggi è ormai quella centesimale. Le suddivisioni vengono fatte una volta per tutte su una matrice in scala più grande, ottenute con una «macchina a dividere» di elevatissima precisione e poi numerate secondo il sistema di graduazione. Sui cerchi di cristallo queste vengono infine riprodotte da una stessa matrice ridotta e stampata per fotoincisione con l'utilizzo di sali d'argento. 9 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Fig. 9.8 – Un teodolite tradizionale. L'oculare di osservazione dei cerchi è solitamente separato e parallelo a quello del cannocchiale dello strumento. Il percorso ottico della luce dal cerchio all'oculare può essere anche assai complesso e fa uso di specchi, lamine piano-parallele, prismi o cunei ottici. In tutti i casi l'osservazione del cerchio è migliorata con l'interposizione sul cammino ottico di un microscopio semplice o composto. 9.6 MEZZI PER APPREZZARE PICCOLI INTERVALLI DI GRADUAZIONE Il nonio è il più antico sistema usato per misurare una parte di un intervallo di graduazione. È costituito da una scaletta ausiliaria affiancata a quella principale. La lunghezza corrispondente al numero di suddivisioni N della scala ausiliaria corrisponde a N–1 lunghezze delle suddivisioni della scala principale. L'approssimazione del nonio è pari al valore di una suddivisione principale diviso il numero di suddivisioni del nonio: a = L⁄N La lettura viene fatta sotto l'indice di lettura della scala del nonio leggendo direttamente le parti intere. La porzione residua è pari all'approssimazione a del nonio, moltiplicata per il numero di parti che portano alla coincidenza di un tratto della scala del nonio con uno della graduazione principale. 10 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE 30 29 28 27 20 26 25 15 24 23 22 21 10 5 19 20 18 17 16 15 14 13 0 19° 51' 00" Fig. 9.9 – Il nonio o verniero. Il nonio così descritto non è più utilizzato, ma se ne è parlato in quanto negli strumenti elettronici viene spesso utilizzato un meccanismo di stima della parte frazionaria della graduazione principale che è simile: incisa su un cristallo trasparente vi è una scala graduata in parti di larghezza leggermente minore o superiore a quella della suddivisione principale. Il passaggio della luce attraverso il cerchio graduato e questa seconda scala, prossima al cerchio, genera delle figure di diffrazione che variano a seconda della posizione di entrambe le divisioni, del cerchio e della scala del nonio. Queste figure, opportunamente rilevate, vengono digitalizzate elettronicamente e consentono di apprezzare le parti frazionarie con accuratezza anche di 1/100 della graduazione principale. Il microscopio a stima è un metodo semplice di lettura dei cerchi: per realizzarlo basta interporre un reticolo all'interno del cannocchiale di osservazione dei cerchi. La lettura viene fatta in corrispondenza del reticolo leggendo le parti intere di angolo che precedono il filo del reticolo e stimando, solitamente come percentuale che viene tradotta mentalmente in termini di frazioni di angolo, la porzione residua compresa tra un tratto della graduazione principale. Fig. 9.10 – Microscopio a stima. Lettura = 22.24 gon. 11 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Il microscopio a scala è una variante al precedente metodo: anziché avere un reticolo semplice costituito da un filo, si produce un reticolo a scala, cioè fatto da tanti tratti equidistanti in un numero di parti sottomultiplo del valore inciso sulla graduazione principale (ad esempio 60 o 100 a seconda del sistema di graduazione). Il reticolo è posto più in alto o più in basso rispetto alla graduazione principale, da cui parte un filo in corrispondenza di un valore angolare esatto che serve da indice di lettura. L'escursione di questo filo su tutta la scaletta corrisponde all'escursione di una traccia di graduazione intera sulla scala principale. Ad esempio, se la suddivisione fosse in gon per la scala principale, si può trovare una scala suddivisa in cento trattini e cioè in primi centesimali (cgon). I mezzi sopra descritti non consentono elevate precisioni di misura. Nei teodoliti ove ci si voglia spingere al di sotto di 5 mgon, si ricorre a sistemi micrometrici ove viene sfruttato meglio il numero di ingrandimenti o il potere separatore dell'occhio umano nel realizzare la coincidenza o la bisezione. V V 86 0 10 85 20 30 40 50 86 60 85 0 1 2 3 4 5 6 7 8 9 10 0 1 2 3 4 5 6 7 8 9 10 356 0 10 20 30 40 50 60 60 50 40 30 20 10 0 3 H 397 H Fig. 9.11 – Microscopio a scala. Lettura H = 397.47. Questi sistemi sfruttano in genere una lastra piano parallela di adeguato spessore, interposta sul cammino luminoso di osservazione dei cerchi; una rotazione sensibile di essa può corrispondere ad uno spostamento micrometrico dell'asse di collimazione che ispeziona il goniometro. La rotazione i della lastra piano-parallela a cui corrisponde un piccolissimo spostamento d, si può così stimare meglio di quanto si possa fare per d . Infatti essa è legata linearmente a d oltre che allo spessore della lastra s ed al coefficiente di rifrazione relativo n del cristallo dalla relazione: n–1 d = si ------------ n Nello schema in figura 9.12, ad esempio, il reticolo è costituito da due tratti paralleli fissi che normalmente cadono in una posizione intermedia interna ad un tratto di graduazione principale. Una lastra piano-parallela interposta sul cammino ottico e comandabile con una vite esterna può portare a bisecare i due fili con un tratto esatto della graduazione principale. La rotazione corrispondente a questo spostamento può leggersi su un tamburo la cui graduazione è visualizzata all'interno del 12 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE cannocchialetto di misura degli angoli, è ingrandita ed osservata col sistema del microscopio a stima. 10 75 15 76 203 V 77 H 205 204 Lettura: V = 76°12’40’’ Fig. 9.12 – Microscopio a micrometro ottico. Alcune case costruttrici adottano il sistema della coincidenza delle immagini che sfrutta la proprietà dell'occhio umano di aumentare il potere separatore di circa quattro volte quando l'occhio debba stimare la coincidenza esatta di due tratti o la bisezione di un tratto all'interno di altri due (si veda la fig. 9.13) e che permette anche l'osservazione diametrale opposta dei cerchi. 203 204 24 25 5 205 26 206 27 207 203 23 204 24 10 205 25 10 206 26 207 27 15 Lettura: V = 25° 13’ 20’’ Fig. 9.13 – Schema di lettura a coincidenza di immagini. Vengono portate nel campo del cannocchiale di osservazione angolare due immagini corrispondenti a due zone diametralmente opposte del cerchio, l'una in una parte sottostante l'altra che gli è sopra e capovolta. Sul percorso di ognuna delle due immagini è inserita una lastra piano-parallela che un semplice meccanismo ad ingranaggi regola in modo che la rotazione di una sia uguale e di verso opposto a quella dell'altra. Normalmente le due scale che sono accostate specularmente non combaciano. Se ad esempio su quella che si legge diritta vediamo la tacca di un angolo intero su quella superiore capovolta l'angolo che si dovrebbe leggere (cioè il precedente più 13 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE l'angolo piatto) non è perfettamente a coincidenza, ciò in quanto è raro fare una lettura esatta all'angolo intero: la distanza fra queste due tacche rappresenta infatti il doppio della parte frazionaria della lettura da stimare che, sommata alla parte intera, costituisce la lettura angolare corretta. Per misurare (e non stimare ad occhio) questa parte possiamo deviare il percorso ottico di entrambe le semi - immagini (secondo quantità misurabili) sino portarle a coincidenza, attraverso la rotazione di una vite che comanda la rotazione contemporanea di due lastre piano-parallele. Il risultato è che ad un apparente spostamento orizzontale in un senso dell'immagine inferiore corrisponde un eguale spostamento in senso opposto di quella superiore capovolta. Lo spostamento che realizza la coincidenza, corrispondente a metà del tratto ancora da stimare, va sommato alla lettura intera della più piccola suddivisione principale che si legge direttamente sul cerchio anche senza l'aiuto di un indice di lettura. Questo indice potrebbe infatti anche essere omesso, perché è evidente quale incisione della graduazione diritta coincida con quella superiore su un angolo più grande di π . Anche qui, come nel caso precedente, la rotazione delle lamine piano-parallele è trasformata in un valore angolare letto su una seconda scala micrometrica visualizzata accanto alla scala principale. Altre case costruttrici, anziché utilizzare questo metodo, inseriscono sul percorso ottico, che proviene dagli opposti lembi del cerchio, delle coppie di cunei ottici emisimmetrici traslabili in altezza. Lo spostamento lineare tra le facce prospicienti questi cunei si traduce in uno spostamento angolare uguale e contrario tra le porzioni di cerchio visualizzate diritta e capovolta. La sensibilità nella misura angolare può spingersi anche ad una frazione di secondo centesimale (s < 0.1 mgon cioè 1cc). –4 La precisione conseguente, nel caso ad esempio in cui s = 10 gon sarebbe di –7 –8 1 ⁄ 4 ⋅ 10 = 2.5 ⋅ 10 . Questa sensibilità è rarissimamente raggiunta con i moderni teodoliti digitali a cerchio codificato. È da mettere bene in evidenza tuttavia che la precisione di misura angolare non coincide con quella di lettura, per la presenza congiunta di numerose altre cause di errore, fra queste, che in seguito esamineremo, l'errore di eccentricità dell'alidada è automaticamente eliminato dalla lettura diametrale, poiché la media delle due letture diametrali, ottenuta per via ottica, ne è esente. 9.7 CONDIZIONI E MEZZI DI RETTIFICA DI UN TEODOLITE Condizioni intrinseche di rettifica Un teodolite si dice intrinsecamente rettificato quando sono verificate le seguenti condizioni: 1. l'asse di rotazione a1 dell'alidada passa per il centro del goniometro azimutale ed è perpendicolare al suo piano; 2. l'asse di rotazione a2 del cannocchiale è normale ed interseca l'asse a1 e passa per il centro del relativo goniometro, cioè quello verticale; 14 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE 3. l'asse a3 di collimazione è normale all'asse a2; 4. i tre assi a1, a2 ed a3 si incontrano in un punto O detto centro del goniometro. Nelle normali condizioni lo strumento è posto in stazione con l'asse a1 verticale e, per conseguenza di una corretta costruzione (rettifica), l'asse a2 si dispone orizzontale. Sull'asse a1 passa quindi il centro del goniometro che misura angoli in un piano orizzontale, cioè angoli azimutali e sull'asse a2 vi è il centro del goniometro che sta su un piano verticale, in grado di misurare angoli zenitali, nadirali o d'inclinazione. Gli errori che influenzano le letture azimutali Quando le condizioni di rettifica sopra indicate non siano rispettate, le letture che si eseguono ai due goniometri non sono in realtà direzioni azimutali né distanze zenitali. Alcune condizioni di rettifica influenzano poco le misure azimutali e più quelle zenitali o viceversa. Si vedrà in seguito nel dettaglio come gli errori residui di rettifica influenzino le letture ai goniometri. Errore di inclinazione, collimazione, verticalità ed eccentricità Nel caso in cui l'asse a2 non sia orizzontale a strumento in stazione, si dimostra facilmente che l'errore di inclinazione i ha un'influenza εi sulla lettura azimutale, funzione della distanza zenitale z: ε i = i ctg z 9.4 L'errore εi ha valore e segno contrario nel caso si effettui la misura angolare nella posizione di cerchio coniugata, cioè capovolgendo il cannocchiale: in tal modo si avrà l'obiettivo dalla parte dell'osservatore, si ricollimerà il punto ruotando l'alidada di un angolo piatto attorno ad a1 per riportare l'oculare verso l'osservatore ed in direzione del punto. Durante questa operazione il cerchio verticale ha assunto una posizione simmetrica rispetto all'osservatore per cui le corrispondenti letture ai cerchi si dicono anche con cerchio verticale a destra (CD) e con cerchio verticale a sinistra (CS) e sono di seguito indicate con Ls ed Ld. Ora la lettura fatta al cerchio azimutale differirà di π ma l'influenza dell'errore εi sarà di segno opposto a quella fatta sulla precedente porzione di cerchio. In tal modo la lettura corretta, fatta ad uno dei due cerchi si ottiene da: Ls + Ld ± π L = ------------------------2 9.5 L'errore di collimazione εc è dovuto alla non ortogonalità tra gli assi a2 ed a3. Detto c l'angolo che manca o che eccede l'angolo retto tra a2 ed a3, si può dimostrare che l'influenza εc sulla lettura azimutale vale: c sin z ε c = ---------- 9.6 15 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE e che ha segno uguale e contrario sulle letture fatte ai lembi coniugati del cerchio. Anche in questo caso la lettura angolare corretta si potrà fare con la 9.5. z a1 A B v A v z C α c β B b α' a=z γ C R=1 O Fig. 9.14 – Errore di verticalità. L'errore di verticalità ε v non è dovuto alla costruzione, ma alla non verticalità dell'asse primario cercata durante la messa in stazione. Chiamato ν quell'angolo che manca all'asse a1 perché sia diretto verticalmente dopo la messa in stazione, il calcolo dell'influenza di questo errore sulla misura degli angoli azimutali può essere fatto ricorrendo a considerazioni di trigonometria sferica. Immaginando l'asse inclinato di ν proiettato su una sfera unitaria (vedi fig. 9.14) si ha, dalla trigonometria sferica sul triangolo ABC: sinβ cotα = cot a sinc – cos c cosβ 9.7 e, tradotta sul triangolo ABC: sin (π –α ' ) cotα = cot z sinν – cosν cos ( π – α ' ) ma: sin ν ≅ ν ; cos ν ≅ 1 cosα sinα ' ---------- = ν cotgz – cos ( π –α ' ) sinα cosα sinα ' ---------- – cosα ' = ν cotg z sinα sinα ' sinα – cosα ' sinα = ν sinα cotg z sin (α ' – α ) = ν sinα cotg z (α ’- α ) è l’influenza che ha l'errore di verticalità sulle misure dell'angolo orizzontale cioè: 16 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE (α ' – α ) = ε ν 9.8 ε ν = ν sinα cotg z L'influenza di tale errore non si può eliminare perché non si conosce a priori la direzione spaziale di a1 e quindi l'angolo α . Tale errore è quindi sistematico ma rifacendo la messa in stazione, ritoccando le viti calanti, si può supporre che l'errore residuo di verticalità sia cambiato in modulo e verso, per cui influenza in modo differente le misure azimutali che, mediate con le precedenti, appaiono soggette ad un errore di tipo accidentale. L'errore di eccentricità dell'alidada è dovuto al fatto che l'asse a1 non passa per il centro del goniometro azimutale e normalmente viene automaticamente eliminato con l'uso di strumenti che sfruttano il sistema di lettura coniugato. Indicata con ε l'eccentricità di tale asse, ipotizzata per semplicità nella direzione dello zero del goniometro, l'angolo vero di rotazione dell'asse di collimazione α ’ differisce da quello misurato di: α' = α –ε Quando si effettua la misura angolare capovolgendo il cannocchiale e ruotandolo di un angolo piatto, la lettura LS sarà: L S = π + (α ' – ε ) LS = π + LD – ε – ε LS – LD – 2 π = –2 ε ; cioè LS + LD – π ε = --------------------------2 La lettura corretta α ' sarà allora: LS + LD – π LS + LD – π α ' = L D – ε = L D – --------------------------- = --------------------------2 2 che, come si vede, è ancora la 9.5. Riassumendo, si può vedere che la semi somma delle letture coniugate al cerchio orizzontale elimina l'influenza degli errori di inclinazione, collimazione ed eccentricità dell'alidada. Rimane non eliminato l'errore di verticalità che si cerca di rendere accidentale come già spiegato. Gli errori residui di rettifica sono quegli errori che rimangono anche dopo che lo strumento è stato controllato e rettificato poiché la sensibilità della livella dell'alidada o del goniometro, ovvero la nostra accuratezza nella rettifica è tale da non eliminare completamente la presenza di questi errori. Le misure degli angoli azimutali possono essere influenzate allora dalla presenza di errori residui di verticalità, di collimazione, di inclinazione, di eccentricità dell'alidada e del cannocchiale. Si è visto sopra però che, a parte l'errore di verticalità che non è eliminabile, per gli altri errori la lettura corretta è data dalla 9.5, che esprime una regola dovuta a Bessel: In un goniometro a cannocchiale capovolgibile è possibile eliminare nelle misure 17 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE angolari azimutali l'influenza degli errori residui di collimazione, inclinazione, eccentricità dell'alidada e del cannocchiale, eseguendo per ogni punto collimato la media delle due letture fatte agli indici diametralmente opposti, col cannocchiale in posizione CS e col cannocchiale in posizione CD. Errori di graduazione dei cerchi La suddivisione della graduazione del cerchio, pure essendo molto accurata, può essere non uniforme (precisa). Sperimentalmente le case costruttrici riescono a fornire delle curve d'errore nella graduazione dei tratti che evidenziano difformità angolari delle suddivisioni: alcune più grandi del dovuto su un tratto, altre più corte in un altro. Questi errori sono normalmente assai contenuti (attorno al secondo sessagesimale) e sono di tipo sistematico. Si può capire però che la somma degli errori, valutata su tutto l'angolo giro deve essere nulla. Si cerca perciò di eliminare questi errori sistematici di media zero, rendendoli accidentali col ripetere le osservazioni angolari su porzioni differenti di cerchio. Come valore più corretto si prenderà poi il valor medio della serie di misure angolari fatte. È dunque evidente che questo errore al tendere delle letture λ ad N, se N è il numero di suddivisioni del cerchio, o ad N/2 per le letture diametrali, si annulla identicamente. I metodi utilizzati per spaziare con le misure angolari su porzioni differenti del cerchio sono due: la ripetizione e la reiterazione. I teodoliti ripetitori hanno la possibilità di collegare, con uno spostamento di una vite, il cerchio alla base (come nelle normali condizioni di lavoro) od il cerchio con l'alidada, in modo che, cerchio ed alidada solidali, ruotando sopra il basamento non spostino la lettura dell'angolo azimutale. Una volta deciso il numero di ripetizioni per determinare un angolo α , le operazioni procedono così: Si collima il punto indietro facendo la lettura Li, poi si collima il punto avanti senza leggere al cerchio. Si blocca con la vite di ripetizione il cerchio all'alidada e si ritorna a collimare il punto indietro con il goniometro che è rimasto fisso sulla lettura precedente. Si sblocca con la vite di ripetizione il cerchio, collegandolo al basamento sottostante e si ritorna a collimare il punto avanti. Ora si blocca cerchio ed alidada e si ripetono queste operazioni sino a compierle n volte. Alla fine delle operazioni l'angolo azimutale corretto sarà: L an – L i ( + k π ) α = -------------------------------n 9.9 ove k è il numero degli angoli giri contenuti in nα . La prima e l'ultima lettura devono effettuarsi ad entrambi i lembi diametrali del cerchio o, come si dice, col cerchio zenitale a destra (CD ) e col cerchio zenitale a sinistra (C S ). Come si vede sono sufficienti quattro letture e 2n puntamenti. I teodoliti reiteratori dispongono invece di una vite (normalmente protetta da una capsula) che serve solo per far scorrere a frizione il goniometro sopra il basamento, ruotandolo attorno all'asse principale. Appariranno quindi, sotto il cannocchialetto di osservazione dei cerchi, porzioni differenti del cerchio. Una volta deciso il numero di reiterazioni n, dette anche strati, occorre fare per ogni punto collimato 18 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE 2n osservazioni (col C S e col C D ) e 2n puntamenti, per ricavare alla fine n valori di direzione angolare relative ad ogni punto osservato. La rotazione da dare al cerchio azimutale dopo ogni strato sarà pari a π/2n, utilizzando strumenti con lettura diametralmente opposta, π/n nel caso meno frequente di utilizzo di strumenti a singolo indice di lettura. Il metodo della reiterazione è più utilizzato perché più preciso della ripetizione, anche se richiede più operazioni. Nella ripetizione infatti possono insinuarsi eventuali errori di trascinamento, dovuti alla non perfetta solidalità (e quindi presenza di spostamenti rotazionali) tra alidada - cerchio e sottostante basamento. Con un semplice esercizio ai minimi quadrati si può dimostrare che se si confrontano le m letture di due strati (n=2), la costante angolare ∆ da togliere alle letture del secondo strato, affinché siano paragonabili a quelle del primo vale: m m 1 ∆ = ---- ∑ β j – ∑ α j m 1 1 Nella formula, β sono le letture angolari del secondo strato ed α le letture del primo strato verso i punti j, comuni ad entrambi gli strati. Il confronto dei valori angolari dei due strati, dal secondo del quale si è tolta la costante ∆, può dare l'idea se la precisione attesa è paragonabile agli scarti e se si è in presenza di errori grossolani. La misura degli angoli zenitali Gli angoli zenitali, o come è meglio chiamarli, le distanze zenitali, si misurano a partire dalla verticale uscente sopra uno dei due indici di lettura che sono solidali all'alidada, mentre il cerchio ruota come il cannocchiale attorno all'asse secondario. Il cerchio verticale dovrebbe essere graduato in modo che, potendo conoscere a priori la direzione dello zenit e puntando verso di essa, la lettura fatta al cerchio sia uguale a zero. Se tale lettura non è zero, il valore prende il nome di «zenit strumentale» o «errore d'indice». Ecco come si determina questo errore: Si ipotizzi di fare la collimazione verso un oggetto lontano e puntiforme in condizioni CS. Supponiamo che la graduazione del cerchio sia oraria. Facendo la lettura al cerchio, noi leggiamo assieme all'angolo z l'errore d'indice η , che ammettiamo gli si sommi. Se indichiamo con «S» la lettura, si ha: S = z +η Ora sblocchiamo l'alidada e la ruotiamo di un angolo piatto per avere verso di noi l'obiettivo al posto dell'oculare. La direzione verso il punto planimetricamente è la medesima, ma il cannocchiale, se prima era inclinato verso l'alto ora lo è verso il basso, il punto non è più collimato e la lettura al cerchio è chiaramente rimasta uguale. Si noti però prima di ricollimare il punto, che tale posizione è simmetrica alla precedente rispetto alla verticale (ipotizzando che la verticale coincida con l'asse principale). 19 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Sblocchiamo ora la rotazione del cannocchiale e del cerchio attorno all'asse secondario e ricollimiamo il punto. Cerchio e cannocchiale devono ruotare (questa volta in senso antiorario) di una volta l'angolo z per arrivare verso la verticale e di un'altra volta l'angolo z per ricollimare il punto; devono ruotare cioè di 2z. Indicando con D la nuova lettura al cerchio verticale questa sarà quindi: D = S – 2z , da cui si può ricavare che: S–D z = ------------2 9.10 Questa relazione, sostituita nella prima, fornisce anche il valore dell’errore d’indice che è: S+D 2 η = ------------- Gli errori che influenzano le letture zenitali a) verticale a1 verticale Si può dimostrare agevolmente che l'influenza che hanno gli errori residui di collimazione c e di inclinazione i sulla misura dell'angolo zenitale z , (detto distanza zenitale), dipendono dai quadrati e dai prodotti di i e c , sono quindi di un fattore più piccolo degli errori stessi e quindi trascurabili, quando il teodolite è soddisfacentemente rettificato. L'errore residuo ν di verticalità, provoca invece un errore in z dello stesso ordine di grandezza, per cui non è trascurabile. a1 b) z v v z-v 2v D' S 30 D 90 S D Fig. 9.15 – Misura degli angoli zenitali. L'angolo z che si ottiene dalla differenza delle due letture zenitali S - D, sarà infatti in tal caso simmetrico non più rispetto allo zenit, ma rispetto all'asse a1 per cui: S – D = 2(z – ν) 20 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Per eliminare l'effetto di ν , si ricorre ad una livella zenitale o all'indice zenitale automatico. Nel primo caso si dispone una livella torica di adeguata sensibilità posta sulla traversa dell'alidada la cui rotazione sposta anche gli indici di lettura zenitali. Le letture S e D al goniometro verticale si eseguono solo a bolla centrata. In questo modo l'indice di lettura (o i due indici diametrali) saranno simmetrici rispetto all'orizzontale individuata dalla livella torica e quindi l'influenza dell'errore di verticalità, anche se presente, verrà eliminata dalla 9.10 ricavata in precedenza: S–D z = ------------2 9.11 Coll'indice zenitale automatico, invece, la simmetria si cerca di ottenerla rispetto ad una verticale individuata da un meccanismo a pendolo o ad un'orizzontale ottenuta con una superficie liquida che si dispone orizzontalmente formando un cuneo ottico. Questi ed altri più complessi meccanismi ottici o meccanici fanno parte dei dispositivi detti compensatori, utilizzati con altri fini anche nei livelli. I compensatori: il compensatore automatico del cerchio verticale, i compensatori dei cerchi azimutali Gli automatismi brevettati dalle case costruttrici che riescono ad eliminare l'influenza dell'errore residuo di verticalità sono molti e anche assai ingegnosi. Si basano tutti sul principio di rendere le letture al cerchio zenitale fatte in posizione C S ed in posizione C D , simmetriche rispetto ad una direzione fissa ed indipendente dall'inclinazione dello strumento. Queste direzioni sono ottenibili mediante la superficie libera di un liquido che si configura orizzontale o la direzione seguita da un pendolo in quiete, cioè la verticale. I compensatori, detti in questo caso anche indici automatici, possono anche distinguersi in indici a compensazione meccanica ed a compensazione ottica. a) b) a1 90 30 90 30 v z Fig. 9.16 – Zenit automatico. 21 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE L'esempio in figura 9.16 vuole schematizzare un indice a compensazione meccanica. Il cannocchiale, ruotando, porta con sè il cerchio verticale. Quando il cannocchiale è posto in direzione dello zenit, la lettura all'indice deve segnare zero, se è già stato corretto l'errore d'indice o zenit strumentale. Un altro esempio è dato dallo schema usato un tempo dalla Filotecnica Salmoiraghi: sopra l'indice di lettura viene riportata l'immagine del cerchio ispezionata attraverso un prisma, sostenuto, a pendolo, da due fili sottili dimensionati in lunghezza in modo che ad una rotazione di ν dell'asse principale corrisponda una variazione nella lettura sul cerchio numericamente pari proprio ad ν . Simile è il principio di funzionamento dell'indice zenitale automatico della Kern, in cui la lente obbiettiva B ed il reticolo A di osservazione al cerchio, sono solidali all'alidada (fig. 9.17). La lente C, che ha il fuoco sul cerchio, è sospesa in D. Quando l'asse principale è ruotato di ν , si crea un disassamento tra le due lenti che dipende dalla lunghezza di appensione l . Tale disassamento è studiato in modo che l'immagine dell'indice di lettura cada sempre sullo stesso punto della graduazione, indipendentemente da una modesta inclinazione dell'alidada. r 0 80 90 80 70 0 0 11 10 0 11 10 α 120 90 α 120 70 r D C B A α Fig. 9.17 – Indice zenitale automatico della Kern. Nei compensatori ottici si sfrutta sovente il principio del cuneo ottico. Un recipiente chiuso, contenente del liquido, all'inclinazione dell'asse principale dell'alidada si atteggia a cuneo ottico, con una superficie orizzontale indipendente da ν . Il cuneo ottico ad angolo variabile devia l'asse di lettura di un angolo β proporzionale a ν . La deviazione, dopo un cammino lungo s vale β s e deve corrispondere a quella 22 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE che si farebbe con un indice solidale all'alidada, cioè β s=r ν (fig. 9.18). Ma β è anche funzione di ν , per cui si può ricavare la relazione esistente tra r ed s che permette di fare in modo che l'immagine dell'indice si formi sempre sullo stesso punto O della graduazione. In questi strumenti la lettura, dà già il valore corretto dell'angolo zenitale, perché tale valore è anche esente dall'errore d'indice e l'errore di verticalità su queste letture è eliminato in modo automatico. verticale at V 80 90 100 70 L2 L1 J Fig. 9.18 – Zenit automatico della «Leica-Wild» a cuneo ottico. 9.8 TEODOLITI ELETTRONICI, LE STAZIONI TOTALI E LE STAZIONI INTEGRATE Princìpî di misura dei teodoliti elettronici I teodoliti elettronici consentono di misurare delle direzioni angolari in maniera elettronica, sono strumenti cioè identici dal punto di vista meccanico ai tradizionali teodoliti ma le letture ai cerchi avvengono elettronicamente, sono poi visualizzate su un piccolo schermo ed eventualmente registrate. Per stazione totale si intende invece un teodolite elettronico che comprenda all'interno della sua struttura un distanziometro. Vi è la possibilità, quindi, di leggere direttamente su un display sia la distanza che le misure angolari. Si chiamano infine strumenti integrati quegli strumenti che sono composti da un teodolite elettronico o tradizionale che è possibile connettere o collegare (di solito a cavallo del cannocchiale) con uno strumento distanziometrico ad onde. Sia le misure angolari che quelle di 23 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE distanza sono lette digitalmente ma i due strumenti sono distinti e separabili. Ritornando ai princìpî di misura elettronica degli angoli, si sceglie spesso di classificarli in funzione della tecnica con cui vengono letti i cerchi e di conseguenza dalle modalità con cui vengono incisi. Vi sono dei teodoliti elettronici che utilizzano cerchi codificati che permettono di conoscere automaticamente la posizione assoluta dell'indice di lettura all'interno del goniometro e quindi della lettura zero dello stesso, ed altri che eseguono la lettura a cerchi graduati, che in genere consentono di misurare una posizione angolare relativa rispetto ad una precedente. Nel primo caso avviene una misura assoluta della direzione angolare e nel secondo una misura incrementale. Una seconda distinzione è sulle modalità di misura angolare: questa può avvenire staticamente o dinamicamente. Nel primo caso il cerchio rimane, come in un teodolite tradizionale, solidale alla base, mentre nell'altro caso il cerchio subisce una rotazione che non è quella dell'alidada ma è prodotta da micromotori continuamente attivi durante la misura. Parliamo prima di alcuni concetti sulla lettura elettronica, codificata o graduata (si può chiamare in sintesi lettura digitale) per poi entrare in merito a particolari tipi di teodoliti elettronici o stazioni totali ed ai relativi sistemi di lettura. Come anticipato, siamo in ogni caso in presenza di strumenti del tutto simili a quelli tradizionali, con cerchi di cristallo sui quali la graduazione, codificata o numerata è ottenuta ancora attraverso processi di fotoincisione. La lettura assoluta Supponiamo ora di distendere su di un tratto rettilineo l'intera circonferenza sulla quale è incisa una particolare graduazione. Definiamo su un'origine il valore zero e sulla fine dell'incisione che corrisponde alla fine del segmento stabiliamo la lettura (sviluppo della circonferenza) c = 2π r. Cerchiamo di capire con quali mezzi, come è possibile, in modo digitale, leggere i cerchi. Fig. 9.19 – Schema di lettura assoluta. Poniamo di dividere questo tratto lungo c in due parti. Una parte sia annerita in modo da renderla opaca alla luce e l'altra metà sia trasparente. Così si è operata una prima suddivisione per due del cerchio. Lo spessore di queste righe opache sia dell'ordine di qualche decimo di mm, così che in pochi mm se ne possano disegnare ad esempio 16 o 32. 24 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE In una riga successiva si divide lo stesso intervallo c in quattro parti e si anneriscono alternativamente due di queste quattro parti. Supponiamo di fare la stessa operazione in una terza riga, dividendola ora in 8 parti ed ancora per esempio in una quarta riga ove le suddivisioni saranno 16. In una posizione qualsiasi del cerchio, su queste suddivisioni parallele, supponiamo vi siano quattro fotodiodi e di fronte a questi, sull'altra faccia del cerchio di cristallo, una sorgente luminosa. Immaginiamo di dover fare una lettura di tensione ai fotodiodi quando questi fotodiodi si trovano ad esempio nella sezione A-A. Leggendo i segnali di luce e di buio provenienti dai fotodiodi possiamo, in modo assoluto, anche se con una precisione abbastanza scarsa in questo esempio, sapere ove si trovano i fotodiodi rispetto al cerchio, cioè all'interno di questa banda che abbiamo disteso. Nel caso esaminato in figura i fotodiodi che permettono il passaggio della luce, ognuno a seconda della presenza di una zona trasparente od opaca, segnalano il primo la presenza di una zona scura (0), il secondo la presenza di una zona chiara (1), il terzo la presenza di una zona scura (0) il quarto quella di una zona trasparente (1). Questo risultato (0101=5/16) è, in linguaggio binario, il numero equivalente alla lettura angolare. Possiamo infatti renderci conto che attraverso il primo fotodiodo siamo in grado di dire che eseguiamo una lettura minore di c/2. Attraverso il secondo fotodiodo sappiamo anche che la lettura è maggiore di c/4 ma sempre minore di c/2, attraverso il terzo si può dire che è maggiore di 2c / 8 ma è anche minore di 3c / 8 e attraverso il quarto fotodiodo si può dire che è maggiore di 5c / 16 ma anche minore di 6c / 16, quindi nell'esempio la lettura angolare finale, essendo c =400 gon, sarà un numero maggiore di 125 gon e minore di 150 gon. In maniera approssimata siamo ora grado di fare queste letture angolari; l'errore massimo in questo esempio poco realistico, è la metà della più piccola suddivisione, cioè ±12,5 gon: è chiaro che una lettura angolare con errore così alto è insufficiente. Questo esempio porta anche a fare l'ipotesi, l'unica ragionevole, che la misura, all'interno del più piccolo intervallo (∆=25 gon) è distribuita secondo una funzione densità di probabilità uniforme. Come si sa, questa distribuzione ha sqm pari a σ = ± ∆ 12 cioè σ = ± 7.2 gon che, come si vede, è minore della tolleranza che è ±12.5 gon. Occorre ora scendere dal principio di funzionamento alla pratica applicazione: ci si rende conto che non si può moltiplicare di molto, per problemi fisici di spazio, il numero dei fotodiodi, come pure non si può suddividere all'infinito la larghezza della corona circolare del cristallo. Questo sistema di misura assoluta, come pure quello incrementale, avrà bisogno necessariamente di un secondo sistema di lettura fine, che permetta cioè la lettura di frazioni delle più piccole parti intere nelle quali è suddiviso il cerchio, in analogia a quanto avveniva nei teodoliti tradizionali col sistema micrometrico. Dei sistemi micrometrici di lettura digitale parleremo più avanti, un cenno se ne fece parlando del nonio, per ora ci basti sapere che sono necessari. Abbiamo parlato di lettura digitale assoluta del cerchio, in questo caso infatti è 25 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE possibile sapere esattamente dove si trova l'ipotetica lettura di zero rispetto all'asse di collimazione. I principi di funzionamento del metodo di lettura incrementale Supponiamo di suddividere il cerchio di cristallo in un certo numero di parti che possono essere spinte sino ad una suddivisione minima (comune anche nei cerchi graduati tradizionali analogici), ad esempio ad 1/10 di gon e supponiamo che non esista una numerazione, ma che esista una piccola sorgente di luce sopra una zona dei cerchi (la zona dell'indice di lettura digitale). Sotto questa e sotto il cerchio, un fotodiodo, sensibile al passaggio della luce, trasmette ad un circuito elettronico di conteggio i segnali di chiaro-scuro che, durante la rotazione dell'alidada, sono passati a causa dei tratti trasparenti alla luce e dei tratti opachi. Questo indice di lettura per conteggio è solidale all'alidada e misura così la rotazione tra il sensore ed una posizione convenzionale del cerchio che è solidale al basamento. Si è in grado cioè, a partire da questo zero del tutto convenzionale, (perché assume ad esempio la lettura zero all'accensione strumentale) di sommare o di sottrarre il numero di volte che il sensore «vede» uno di questi passaggi tra il chiaro e lo scuro. Uno dei problemi è capire automaticamente qual è la direzione di somma e quale quella di sottrazione di questi conteggi, ad esempio l'oraria di somma e l'antioraria di sottrazione, in altri termini occorre cioè capire qual è la direzione di rotazione del cerchio. Ciò si risolve utilizzando più sensori a fotodiodo, sfasati angolarmente di quantità note, cioè posti in parti diverse del cerchio. Avendo collocato attorno al cerchio più fotodiodi con un certo sfasamento noto, a seconda della rotazione oraria o antioraria dell'alidada, un segnale arriva sul tratto opaco o luminoso prima o dopo l'arrivo dell'analogo segnale proveniente da altri fotodiodi a seconda che si ruoti l'alidada in senso orario od antiorario. La sequenza di tratti trasparenti ed opachi ha cioè un certo ordine se si ruota in senso orario e l'ordine inverso se si ruota in senso antiorario. In genere tutti i metodi di lettura digitale usano più serie di fotodi disposti in parti diverse del cerchio. Vi è poi il problema identico a quello della lettura analogica dei cerchi graduati: quello di saper arrivare ad una approssimazione della misura angolare più spinta della minima suddivisione; serve cioè un interpolatore. Un comune denominatore di molti di questi sistemi è il metodo di interpolazione utilizzato: il sistema interpolatore è in genere costituito da una seconda graduazione incisa su un piccolo vetrino di cristallo solidale all'alidada (od al cannocchiale per le distanze zenitali) interposto alla graduazione principale in prossimità del sensore ottico, in modo tale che la luce, passante per il cerchio e questa seconda scala, produca delle frange di interferenza. Queste vengono «lette» a loro volta con altri sensori digitali (CCD) che ricevono e misurano i livelli di grigio delle frange così prodotte. 26 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE Questa figura di interferenza è un tratto di lunghezza abbastanza ampio rispetto alle minime suddivisioni m, (è una figura ad esempio di 16 m, 32 m). A seconda della serie di livelli di grigio o per meglio dire, a seconda della posizione dei livelli di grigio e dell'intensità dei livelli di grigio, si ha la possibilità di interpolare all'interno della minima suddivisione sulla quale cade l'indice di lettura. Questo avviene in quanto il segnale ottico viene convertito in forma digitale e viene misurato lo sfasamento ∆ ϕ dell'onda interferometrica così osservata con una sensibilità pari o migliore di 1/100 del minimo intervallo della graduazione principale. Si è realizzato così un micrometro digitale. I metodi adottati dalle principali case costruttrici È assai difficile affrontare un discorso generale e contemporaneamente approfondito, se non esauriente, sui metodi di lettura elettronica degli angoli, e forse è anche poco utile concretamente, concentriamo e limitiamo allora la trattazione ad alcuni metodi adottati dalle diverse case costruttrici. Il primo sistema che esaminiamo è quello della Leica-Wild adottato negli strumenti Theomat T2002 e nel Theomat T3000. È un sistema di lettura dinamica di alta precisione e per questo è bene capire più in dettaglio rispetto ad altri sistemi come funziona. Uno degli errori di cui è affetta la misura angolare è l'errore residuo di graduazione: questo errore è pressoché inevitabile, ma si riduce tradizionalmente con il metodo della lettura a strati, attraverso la reiterazione o la ripetizione. Nel metodo di lettura dinamica è invece possibile tenere in considerazione (misurare in un certo senso), tutte le suddivisioni di ogni parte del cerchio ad ogni singola lettura goniometrica, riducendo con ciò in teoria a zero sia questo errore, sia l'errore di eccentricità dell'alidada: ciò avviene appunto negli strumenti T2002, T3000 e in tutte le letture dinamiche. Nello strumento T2002, entrambi i cerchi di 52 mm di diametro sono divisi in 1024 intervalli, tutti osservati ad ogni misura attraverso una rotazione completa del cerchio di cristallo graduato in identici intervalli trasparenti-opachi. Il segnale luminoso, tradotto dai fotodiodi in segnale elettrico, non è più un segnale statico ma una vera e propria onda elettromagnetica in quanto il cerchio ruota continuamente. Questo segnale, variabile nel tempo e dipendente dalla rotazione del cerchio, proviene da due predisposte barriere di fotodiodi (vedi fig. 9.20), una solidale all'alidada (R ) e posizionata sulla parte interna del cerchio e la seconda (S ) fissa al basamento ed esaminante la parte esterna dello stesso cerchio. Durante la rotazione del cerchio il segnale luminoso ad onda quadra, trasformato dai fotodiodi in segnale elettrico, permette ad ogni istante t (la completa rotazione del cerchio avviene in 338 ms), di misurare lo sfasamento fra i due segnali S e R e mediare tutte le numerosissime misure di sfasamento eseguite in questo breve intervallo di tempo. La misura di questo sfasamento costituisce la misura «fine» dell’angolo, similmente ai distanziometri ad onde: l’angolo ϕ che, dal centro di rotazione è sotteso tra il 27 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE sensore solidale al basamento e quello solidale all'alidada sarà uguale a: ϕ = n ϕ 0 + ∆ϕ 9.12 dove n è una costante intera che si ricava dal conteggio del numero di chiaroscuri osservati dal sensore LS o da LR. S(t) R t marker ϕ0 ϕ0 = T0 R(t) R S t S ϕ ϕ = n ϕ 0 + ∆T ∆ϕ = ∆T T T = nT 0 + ∆T Fig. 9.20 – Sistema assoluto dinamico Leica-Wild. Nel caso in esame ϕ 0= 2π /1024, essendo ϕ 0 la più piccola parte di graduazione del cerchio. Esiste dunque una misura approssimata n ϕ 0 ed una misura fine ∆ϕ . Per eliminare l'errore di eccentricità, sia i sensori LS che i sensori LR sono in realtà coppie di sensori diametralmente opposti. Un unico processore presiede alla media delle numerosissime misure che danno poi luogo alla lettura azimutale e zenitale. La misura ed il calcolo avviene per entrambi i cerchi in meno di un secondo. È anche possibile predisporre lo strumento per la lettura continua che può avvenire a cadenza di 0.1 s o di 0.15 s, diminuisce però in questo modo la precisione di lettura (il cerchio esegue una rotazione parziale). Per il cerchio azimutale LS è posto nella posizione convenzionale dello zero della graduazione, per il cerchio zenitale LS è in direzione dello zenit mentre LR è nella direzione del cannocchiale. Il sistema di lettura, dunque, è un sistema assoluto. Per correggere le letture zenitali dall'errore di verticalità, il percorso della luce infrarossa dei sensori zenitali viene preventivamente deviato da un compensatore a liquido siliconico. Quando viene impartito l'ordine di misura, un motore ruota il cerchio azimutale o zenitale ad una velocità rigorosamente costante entro limiti di tolleranza sempre controllati. Il conteggio del numero intero n di suddivisioni tra i sensori LS e LR è semplice in quanto fra le graduazioni esiste una marca di riferimento, durante tutto il giro del cerchio un contatore conta il numero di graduazioni dopo il passaggio del riferimento da LR sino al comparire dello stesso in LS. La misura fine della parte ∆ϕ avviene dopo aver convertito il segnale completo (di 338 ms di durata) in forma digitale. Il segnale viene analizzato attraverso un conta- 28 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE tore con frequenza di campionamento di 1.72 MHz. Dunque 338 ms osservati a 1.72 MHz corrispondono ad un numero di campioni c in 400 gon: c = 338 ⋅ 10 –3 ⋅ 1.72 ⋅ 10 6 = 581 ⋅ 10 3 La quantità minima «visibile» dal sistema digitale è allora (in mgon) di: t = ( 400 ⋅ 10 3 ) ⁄ ( 581 ⋅ 10 3 ) = 0.68 mgon che rappresenta una sorta di tollerenza limite della lettura angolare. Il periodo di chiaro scuro è di T= 338 ms/1024 =330 µ s. In realtà non si deve considerare la tolleranza limite t della lettura ma il suo scarto quadratico medio σ . Ipotizzando ragionevolmente la funzione densità di probabilità abbia la forma della distribuzione rettangolare e che il supporto di variazione sia appunto di 0.68 mgon, il valore di σ di ottiene da: 0.68 mgon σ = ± ------------------------- = ± 0.2mgon 12 Dobbiamo considerare ancora che le misure di fase conteggiate sono ben 1024 e, nel valutare la misura, si tiene conto di tutti questi conteggi; per questo la precisione teorica limite aumenta di un fattore 2 ⁄ 1024 . La radice di due al numeratore è dovuta al fatto che la lettura angolare è ottenuta per differenza delle fasi provenienti dai segnali R e S. In tal modo si ottiene per σ il valore limite minimo: σ 1 = ± ( 0.2mgon ⁄ 23 ) ≅ ± 0.01mgon Lo scarto quadratico medio minimo ottenuto in laboratorio, quindi in condizioni ideali ma non teoriche di misura, è stato tuttavia di 0.05 mgon. La casa costruttrice fornisce una deviazione standard di 0.15 mgon per entrambe le letture ai cerchi secondo le norme DIN 187231. La risoluzione di lettura è tuttavia spinta a 0.01 mgon. Il compensatore a liquido siliconico agisce su entrambi gli assi di rotazione del teodolite: principale e secondario, ed ha una precisione di rettifica di 0.03 mgon, diminuendo l'influenza dell'errore di verticalità anche sulle letture azimutali. Parliamo ora del sistema di misura continua, statica e con codificatore assoluto adottato nei teodoliti T1000 e T1600 della ditta Leica-Wild. I cerchi azimutale e zenitale di 78 mm di diametro sono suddivisi in 1152 graduazioni, raggruppabili in maniera distinguibile in 128 settori (da 0 a 127). In ciascun settore cioè vi sono 1152/128=9 informazioni elementari (o divisioni a seconda di come le si intendono) di 0.27 mm di interasse. In maniera binaria queste 9 suddivisioni contengono: un «marker», cioè un codice che segna l'inizio del settore, 7 bit, contenenti il numero di settore ed un bit di parità per il controllo delle letture. I cerchi, fissi rispetto al basamento od all'asse secondario del teodolite, sono illuminati in prossimità dell'indice di lettura elettronico con un led a luce rossa che illumina una piccola parte del cerchio: circa 4 gon, di poco superiore alla dimensione di un settore che è 400/128=3.125 gon proiettando la luce al di là del cer1 Che sono divenute lo standard per valutare le precisioni di teodoliti tradizionali ed elettronici. 29 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE chio. La luce, dopo il passaggio attraverso una lente ingrandente, cade su un sensore formato da una serie di 128 fotodiodi. Questi fotodiodi sono governati da un processore che converte il segnale analogico luminoso in forma digitale cosicché un numero binario traduce lo stato luce/buio per ognuno dei fotodiodi. Su 4 gon di ampiezza del segnale luminoso sono posti 128 fotodiodi, ovvero vi sono su un settore di 3.125 gon, esattamente 100 fotodiodi: è questo il sistema micrometrico di lettura all’interno di ciascun settore. Fig. 9.21 – Il sistema di lettura del teodolite Leica-Wild Ti1600. Il diodo led illumina dunque sempre almeno un marker di settore e permette al processore di capire sotto quale dei due o tre settori si trova il centro del led ed il marker necessario per la lettura micrometrica. Chiamiamo dunque con N il numero di settore riconosciuto in maniera assoluta, per la parte di lettura micrometrica il processore traduce in modo digitale il numero di frazione di settore f da zero a 100 corrispondente al numero di pixel al di fuori della marca di riconoscimento del settore. La lettura angolare corretta sarà allora: (N – f ) ⋅ 400 l = -----------------------------128 Nell'esempio di figura 9.21 la lettura intera sarà N =0=128; la lettura fine è f ' = 55 cioè il marker è visibile sul 55-esimo fotodiodo su 100 utili. Ne segue: f = f ' ⁄ 100 = 0.55 128 – 0.55 l = ------------------------- ⋅ 400 = 398.2815gon 128 Ci domandiamo ora quale sarà la precisione di lettura. Notiamo dapprima che le nove suddivisioni proiettate su 100 fotodiodi consentono di stimare la parte frazio- 30 STRUMENTI PER LA MISURA ANGOLARE: IL TEODOLITE naria del settore con una approssimazione superiore al pixel2, cioè con scarto quadratico medio σ di circa ±0.15 pixel. Per ogni lettura si avrà quindi: 0.15 ⁄ ( 100 ⋅ 400 ) 128 σ = ± ------------------------------------------- gon = ± 4.7mgon Ogni 3 ms avviene una lettura. La misura si ricava dalla media di 133 letture corrispondenti ad un intervallo di misura di 400 ms; il valore teorico di σ si riduce quindi a: 4.7 133 σ min ± ------------- = ± 0.4 mgon La casa fornisce per il T1600 uno sqm standard (a norme DIN 18723) di ± 0.5 mgon, mentre la risoluzione arriva a 0.1 mgon. Lo strumento è dotato di un compensatore a pendolo per l'indice zenitale. Citiamo ancora brevemente alcuni sistemi di lettura. Nel sistema assoluto statico TOPCON i cerchi, sia l'orizzontale che il verticale, di 71 mm di diametro, sono in realtà formati dall'accoppiamento di due dischi di cristallo flint di 4 mm di spessore concentrici e rispettivamente solidali alla parte fissa ed alla parte rotante (nel caso del cerchio orizzontale all’alidada ed al basamento). I cerchi suddivisi in 1 gon il primo ed in 2 gon il secondo sono osservati proiettando con un led le tracce di entrambi su un fotodiodo CCD che funge da lettore micrometrico in maniera simile a quanto descritto per lo strumento T1600. Le letture in realtà sono doppie in quanto diametrali. Lo sqm di lettura dei cerchi (a norme DIN 18723) è per lo strumento GTS6 o GTS6A di ± 0.6 mgon e la misura avviene in 0.3 s. Questi strumenti sono dotati di doppio compensatore. Lo strumento SOKKIA SET 2C è di caratteristiche e precisioni simili. Anche gli strumenti AGA sfruttano due cerchi concentrici fissi, solidali alla parte fissa ed alla parte ruotante. Il sistema di lettura è incrementale. Il principio di lettura micrometrica è induttivo essendo le suddivisioni dei cerchi conduttrici e percorse da corrente. È possibile misurare la differenza di potenziale ∆ V fra i due cerchi, massima nel caso di ricoprimento e minima a metà graduazione. Per la misura angolare si contano il numero di lunghezze d'onda intere e si interpola la porzione di lunghezza d'onda per mezzo di convertitori A/D analogici digitali. In questo modo, pur raggiungendo uno sqm (a norme DIN 18723) di ± 0.6 mgon, comune ad altri strumenti, si tiene in realtà conto di tutta la suddivisione del cerchio, di modo che queste letture sono teoricamente esenti dall'errore di suddivisione. Anche questi strumenti sono dotati di doppio compensatore. Infine citiamo il sistema dinamico incrementale della NIKON che, sullo strumento DTMA6, utilizza un sistema che è simile al sistema dinamico Leica-Wild. In questo caso la ditta fornisce uno sqm di lettura di ± 0.2 mgon. 2 Una interpretazione di ciò: i. perché faccio 9 misure ⇒ σ =1/3 ii. perché 2 ⁄ 12 è σ ⇒ 1 ⁄ 2.45 = ± 0.136 = 1 ⁄ 7.35 31 10. LIVELLAZIONI 10.1 PREMESSA Il rilievo del territorio o dell'oggetto in senso lato, richiede una sua conoscenza non solo planimetrica ma anche altimetrica. In cartografia l’altimetria può essere rappresentata per punti discreti o per curve di livello, mentre in un rilievo cartografico numerico, specie se ottenuto per vie fotogrammetriche dirette, ogni oggetto rilevato è già naturalmente formato da una serie di tre coordinate. Determinare la quota di più punti è fondamentale nella costruzione di qualunque opera antropica e di ingegneria ed è ovvio che per questi scopi occorre fare riferimento al campo reale della gravità, e quindi al geoide, e non a superfici teoriche note solo matematicamente come l'ellissoide. In termini non rigorosi possiamo definire il geoide come quella particolare superficie equipotenziale che passa per il livello medio del mare in quiete: è evidente che il punto di quota zero deve così essere determinato in corrispondenza del mare. L'operazione si esegue anche con l'aiuto di opportuni strumenti detti mareografi in grado di calcolare e rappresentare graficamente l'andamento altimetrico del mare, depurato dal moto ondoso e mediato dai suoi moti periodici. Riprendiamo allora alcuni necessari concetti di Geodesia. Si definisce quota ortometrica di un punto la distanza del punto dal geoide, misurata lungo la linea di forza passante per il punto stesso. Si definisce dislivello (ortometrico) tra due punti la differenza di quota ortometrica tra i due punti: ∆AB =Q B - Q A . Come si vede il dislivello è positivo o negativo a seconda che la quota del secondo punto sia maggiore o minore di quella del primo. Per livellazione si intende l'operazione di misura di un dislivello fra due punti. Le livellazioni si effettuano con strumenti che sfruttano princìpî legati a come si dispongono le superfici liquide in quiete od a pendolismi. 10.2 I VARI TIPI DI LIVELLAZIONE Una suddivisione schematica delle livellazioni può essere fatta in base agli strumenti adottati, essendo i metodi correlati agli strumenti. Vi sono livellazioni che 32 LIVELLAZIONI richiedono la preventiva determinazione o la conoscenza della distanza tra i punti tra cui si richiede il dislivello, altre che prescindono da ciò. Citiamo: Livellazioni indipendenti dalla distanza 1. La livellazione geometrica, che utilizza il livello a cannocchiale, le stadie, un eventuale micrometro a lamina piano parallela e vari accessori. 2. La livellazione idrostatica, che prevede l'utilizzo di sistemi a vasi comunicanti e sfrutta il principio che in questi vasi il pelo libero si dispone lungo una superficie equipotenziale. 3. La livellazione barometrica, che è basata sul principio che il dislivello fra due punti relativamente vicini sulla superficie terrestre è funzione della pressione e in parte della temperatura di un loro intorno. Livellazioni dipendenti dalla distanza 1. La livellazione tacheometrica o distanziometrica, che utilizza il teodolite ed un distanziometro ad onde. 2. La livellazione trigonometrica, che utilizza il teodolite e un distanziometro di grande portata, ma più spesso sfrutta la misura indiretta della distanza o la sua conoscenza a priori e prevede la stima della rifrazione. 3. La livellazione ecclimetrica, che prevede l'utilizzo di un ecclimetro e cioè di un goniometro in grado di misurare angoli in un piano verticale e la misura diretta o indiretta della distanza. 10.3 LA LIVELLAZIONE GEOMETRICA La livellazione geometrica utilizza come strumento di misura il livello a cannocchiale, detto anche livello; lo strumento è strutturalmente formato da tre parti (vedi fig. 10.1): il cannocchiale, il quale è appoggiato isostaticamente su una traversa, quest'ultima può ruotare sul basamento. La classificazione storica dei livelli (ormai obsoleta che riportiamo solo per curiosità), fatta per tipologia costruttiva è la seguente: 1. livelli a cannocchiale fisso con o senza vite di elevazione (detti livelli inglesi); 2. livelli a cannocchiale mobile e livella fissa alla traversa; 3. livelli a cannocchiale mobile e livella fissa al cannocchiale (detti livelli Chézy); 4. livelli a cannocchiale mobile e livella mobile (detti livelli Lenoir); 5. livelli con livelle a doppia curvatura e cannocchiale ruotabile attorno al proprio asse a manicotto. I moderni livelli sono derivati dal modello inglese. La rappresentazione schematica in figura riporta un livello tradizionale con vite di elevazione. L'operazione di misura di un dislivello fra due punti avviene misurando per collimazione un regolo graduato detto stadia: si misura la posizione del reticolo del cannocchiale sulla stadia dopo aver reso l'asse di collimazione accuratamente orizzontale. 33 LIVELLAZIONI Z cannocchiale t c traversa vite di elevazione basamento Z Fig. 10.1 – Schema del livello a cannocchiale con vite di elevazione. Per poter rendere orizzontale l'asse di collimazione i livelli dispongono, solidalmente al cannocchiale, di una livella torica di alta precisione. La condizione di rettifica del livello è che l'asse di collimazione e la tangente centrale della livella torica siano paralleli (t / / c in fig. 10.1), in tal modo a tangente centrale della livella orizzontale, anche l'asse di collimazione è reso orizzontale. La «messa in stazione» consiste solamente nel centrare la livella sferica solidale al basamento, l'orizzontalità della linea di mira si ottiene prima di ogni lettura alla stadia centrando la livella torica attraverso la vite di elevazione (fig. 10.1). È immediato chiedersi in cosa differisce questo strumento dal teodolite: sono scomparsi i cerchi e l'alidada, esiste ancora un'asse primario, ma il cannocchiale è incernierato alla traversa e la vite di elevazione permette di alzare od abbassare l'asse di collimazione di soli pochi gon dall'orizzontale. Di gran lunga attualmente più utilizzati che i livelli sono gli autolivelli, sempre derivati da questi primi strumenti descritti, ma nei quali l'orizzontalità dell'asse di collimazione è raggiunta automaticamente con sistemi a pendolismo od a fluido, meccanici od ottici. L'operazione elementare della lettura della stadia posta su due punti si chiama battuta di livellazione. La classificazione dei livelli e della livellazione geometrica viene fatta in relazione alla precisione dello strumento: è basata sull'errore quadratico medio di una livellazione 34 LIVELLAZIONI in andata e ritorno su un tratto di un chilometro; (sqm chilometrico σ k ). Si hanno: 1. livelli di bassa precisione o da cantiere: σ k ≥ 5 mm 2. livelli da ingegneria: 2 mm ≤σ k < 5 mm 3. livelli di precisione: 1 mm ≤σ k < 2 mm 4. livelli di alta precisione: σ k < 1 mm Per raggiungere queste precisioni, in realtà, assieme allo strumento devono utilizzarsi accessori e metodi specifici di rilievo. Un livello di precisione o di alta precisione, che si contraddistingue per l'alta sensibilità della livella torica, osservata a coincidenza (fig. 10.11), dall'alto numero di ingrandimenti del cannocchiale, si abbina sempre ad una adeguata lamina piano parallela e ad una stadia graduata su un nastro di acciaio invar (fig. 10.10). I punti tra cui si calcola il dislivello con una battuta di livellazione devono essere situati ad una distanza limitata, sia per poter leggere alla stadia con elevata precisione, sia per poter limitare errori sistematici od accidentali del metodo. Le metodologie per la determinazione del dislivello con livellazione geometrica sono così suddivise: – livellazione dal mezzo – livellazione da un estremo – livellazione reciproca. La livellazione geometrica dal mezzo Per un attimo facciamo l'ipotesi che, nella distanza stazione-stadia, la superficie di riferimento possa essere schematizzata da un piano orizzontale. Facciamo inoltre l'ipotesi che siano esenti altri errori sistematici che vedremo nel seguito. O B lA lB A QB QA Geoide Fig. 10.2 – Schema della livellazione geometrica dal mezzo. 35 LIVELLAZIONI Il dislivello tra A e B vale: ∆ AB = Q B – Q A = lA – lB 10.1 La distanza fra ogni battuta di livellazione dipende dalla precisione che si vuole ottenere, per livellazioni tecniche non supera i 200 m, mentre per livellazioni di precisione o di alta precisione non supera mai i 40 m. Il punto A viene denominato spesso «punto indietro» ed il punto B «punto avanti». Per determinare il dislivello tra punti C e D non direttamente visibili o distanti, occorre eseguire una serie di battute lungo un percorso detto linea di livellazione. Il dislivello esistente allora fra i punti C e D sarà dato da: ∆ CD = a=D ∑ i=C ∆ ia = a=D ∑ a=D li – i=C ∑ la 10.2 i=C dove gli indici i ed a hanno il significato appena chiarito. Errori di curvatura e di rifrazione ε d d x y Geoide R R ω ω R R Fig. 10.3 – a. Errore di curvatura terrestre – b. Errore di rifrazione. Osserviamo la figura 10.3a. Nell’ipotesi che, in un ambito limitato, geoide e sfera locale siano fra loro paralleli, l'errore di curvatura terrestre è dato da: R 1 x = ----------- – R = R ----------- – 1 cosω cosω sviluppando in serie il coseno e arrestandosi al primo termine si ha: x 1 ω2 ω2 --- ≈ ---------------2- – 1 ≈ 1 + ------ – 1 = -----R 2 2 ω 1 – -----2 da cui: d2 x --- = --------2- ; R 2R d2 x = -----2R che è poi la 3.24. 36 LIVELLAZIONI L'errore di rifrazione (fig. 10.3b) è dovuto al fatto che la radiazione luminosa non attraversa il vuoto ma si propaga in un fluido rifrangente quale l'atmosfera che ha un coefficiente di rifrazione variabile e decrescente dai livelli più prossimi al suolo ai livelli più alti in quota. Volendo discretizzare l'atmosfera in una serie di sfere concentriche di costante coefficiente di rifrazione, ma decrescente con la quota, si vede dalla figura che il raggio luminoso che parte secondo una direzione tangente al geoide in un punto (cioè orizzontale) viene deviato via via verso la terra. Si è trovato sperimentalmente che l'angolo di deviazione ε è proporzionale, attraverso una costante k, all'angolo al centro che sottende un arco pari alla distanza d , cioè: ω ε = k ---; 2 d2 y = ε d = k -----2R I valori più comuni per k sono (0.1 ≤ k ≤ 0.2). Questo errore ha segno contrario a quello di curvatura terrestre per cui l'errore complessivo di curvatura e di rifrazione terrestre sarà: d2 x – y = ( 1 – k ) -----2R Nello schema di misura della livellazione dal mezzo (fig. 10.4), l'errore di rifrazione, di curvatura terrestre e quello residuo di rettifica, nel caso in cui le distanze stazione-stadia siano uguali si annullano nel calcolo del dislivello. O δA δB lA lB B QA QB Geoide δA = δB Fig. 10.4 – Schema di misura di un dislivello con lettura dal mezzo. Con queste ipotesi, considerato che l'errore dovuto alla curvatura del geoide nei punti A e B di figura 10.4 è lo stesso in segno e valore, valgono ancora le formule 10.1 e 10.2. 37 LIVELLAZIONI La livellazione geometrica da un estremo Astraendo dalla curvatura terrestre, dall'errore di rifrazione e dall'errore residuo di rettifica, il dislivello nel caso di una livellazione da un estremo si ottiene come è evidente in figura 10.5 da: ∆ AB = Q B – Q A = h A – lB 10.3 O lB hA B ∆ AB A QA QB Piano topografico Fig. 10.5 – Schema di livellazione da un estremo. È chiaro tuttavia che questi errori sistematici in questo caso si scaricano completamente e senza controllo sulla determinazione del dislivello. La livellazione geometrica reciproca Quando non sia possibile posizionarsi in un punto equidistante dagli estremi per eseguire una livellazione dal mezzo si può eliminare l'influenza dell'errore residuo di rettifica, dell'errore di curvatura terrestre e di rifrazione atmosferica con questo tipo di livellazione. Per calcolare il dislivello ∆AB si effettuano due stazioni. Nella prima stazione in prossimità del punto «indietro» A e si fanno le letture alla stadia sia in A che in B. Se poi il cannocchiale è distanziometrico o se si dispone di un livello elettronico, si calcola la distanza della prima stazione sia da A che da B , altrimenti è sufficiente una conoscenza approssimativa delle due distanze. Si effettua una seconda stazione questa volta in prossimità del punto «avanti» B, posizionando il livello in modo che la distanza verso il punto avanti sia uguale a quella che la precedente stazione aveva dal punto indietro ma anche che la distanza verso il punto indietro sia uguale alla precedente verso il punto «avanti», lavorando cioè secondo uno schema a parallelogramma. Il dislivello corretto è dato dalla media aritmetica dei due dislivelli calcolati dalle due stazioni. 38 LIVELLAZIONI a. δ'B δ'A l 'B l'A B ∆ AB A S1 b. δ"A δ"B l "B l"A S2 B ∆ AB A Fig. 10.6 a/b – Schema di misura di un dislivello con livellazione reciproca. Dalla stazione S1 si ha: ∆ AB = (l'A – δ A' ) – (l 'B – δ 'B ) e da S 2 si ottiene: ∆ AB = (l ''A – δ ''A ) – (l ''B – δ ''B ) ma, essendo δ 'A = δ ''B e δ ''A = δ 'B , sommando membro a membro si ricava: (l 'A – l 'B ) + (l ''A – l ''B ) ∆ AB = -------------------------------------------------2 Le livellazioni geometriche di precisione Queste livellazioni richiedono non solo strumenti adeguati ma anche procedure atte ad eliminare gli errori che possono influenzare la misura del dislivello. Il livello di precisione o di alta precisione ha un cannocchiale a lunghezza fissa di grande luminosità e di molti ingrandimenti, (sino a 40-50) ed è costruito di solito con vite di elevazione. La «messa a fuoco» cioè l'adattamento alla distanza della stadia è un'operazione che deve avvenire con estrema cura, perché può pregiudicare la precisione del metodo, se rimangono delle parallassi superiori alla precisione della misura. Negli strumenti detti autolivelli od auto livellanti la resa orizzontale dell'asse di collimazione può avvenire in maniera automatica, grazie a meccanismi detti compensatori basati su pendolismi o superfici liquide riflettenti, interne al percorso del cannocchiale. 39 LIVELLAZIONI I compensatori fornivano un tempo precisioni inferiori a quelle raggiungibili con la livella torica, attualmente si sono raffinati in modo tale che vengono adottati anche in autolivelli di alta e altissima precisione. Essendo la precisione dei livelli funzione della precisione dell'orizzontalità dell'asse di collimazione, non solo la livella torica è molto sensibile, ma si cerca di migliorarne anche la precisione di centramento attraverso l'osservazione eseguita con un dispositivo detto a c oinc idenza di imma gine che permette il centramento fine ed un'osservazione ingrandita. Questo sistema permette di osservare contemporaneamente entrambi i lembi della superficie liquida: l'immagine di questi lembi, attraverso un percorso ottico fra prismi e lenti viene poi portata ad un piccolo oculare secondario, posto a lato del principale. Alternativamente l'immagine viene inserita in parte dello stesso campo dell'immagine principale osservata (vedi fig. 10.7a e 10.7b). 150 20 30 10 148 40 100 50 90 146 60 80 70 144 Lettura: 1,4724 m a) b) Fig. 10.7 – Il reticolo del livello ed il sistema di lettura a coincidenza della livella torica. Con il centramento a coincidenza l'errore residuo è diminuito rispetto alla lettura a stima, si ha infatti: e = 0.06 v'' 10.4 dove v " è la sensibilità della livella, che negli strumenti di alta precisione è compresa tra i 10" ed i 25" per 2 mm. Le stadie da utilizzare per livellazioni di precisione sono quelle a nastro di invar (che tra poco descriveremo) e vanno poste su punti altimetricamente univoci e sicuri quali pilastrini con chiodi a testa semisferica o tripodi con chiodi in acciaio a testa semisferica, se fosse solo sufficiente stazionare provvisoriamente. L'operazione di centramento della bolla o di assestamento dell'autolivello di precisione richiede molta pazienza, le condizioni atmosferiche, per un improvviso comparire del sole tra le nuvole ad esempio, possono causare variazioni termiche nel treppiede tali da portare fuori coincidenza la livella torica. Per questo motivo, in dotazione a questi strumenti si trova alcune volte anche un ombrellone da sole. 40 LIVELLAZIONI La procedura per effettuare una livellazione di precisione od alta precisione è sempre la livellazione geometrica dal mezzo, quando è il caso, reciproca. Le distanze, come già detto, tra il punto e la stazione non devono superare i 40 o 50 metri. La livellazione deve essere condotta sia in andata che in ritorno e la discordanza tra i dislivelli (misurati per ogni battuta almeno due volte) deve rimanere in tolleranza. La Commissione Geodetica Italiana ha redatto una «Guida alla progettazione e alla esecuzione delle livellazioni geometriche» in cui fornisce suggerimenti per razionalizzare le operazioni oltre ai valori di queste tolleranze. La tolleranza tra la misura in andata e quella al ritorno in un tratto di lunghezza L , esprimendo la lunghezza della livellazione in km è dato da: t = ± 6 L mm per le livellazioni di precisione; t = ± 3 L mm per le livellazioni di alta precisione. Se la livellazione segue un poligono chiuso di lunghezza L, le tolleranze sull'errore di chiusura saranno ovviamente le precedenti ridotte del fattore 2 . 10.4 LE STADIE Per livellazioni tecniche o da cantiere, si utilizzano delle stadie in legno, aste centimetrate generalmente della lunghezza di due o tre metri (fig. 10.8). Nel caso di livellazioni di precisione le stadie sono formate da una custodia in legno o di alluminio, contenente un nastro di acciaio invar centimetrato o mezzo centimetrato. In entrambi i casi le graduazioni sono numerate ad ogni decimetro. Le stadie dispongono di una livella sferica che ne rende possibile la resa verticale, ciò è anche assicurato dall'operatore che regge questi attrezzi nelle livellazioni tecniche con due paline, o, nelle livellazioni utilizzanti stadie a nastro invar, con l'aiuto di due aste allungabili, che dalla sommità della stadia si ancorano saldamente al terreno. 13 12 11 Fig. 10.8 – Porzione di stadia in legno centimetrata. 41 LIVELLAZIONI Nella livellazione di precisione la verticalità della stadia va realizzata con cura maggiore, infatti, pure essendo l'errore di lettura del secondo ordine rispetto all'angolo ω (vedi fig. 10.9): ω2 ε = l – l cos ω ≅ l ------ 10.5 2 Per l=2 m ed ω =1 gon, tale errore è di 0.25 mm, che nel caso di livellazione di alta precisione non è accettabile. Normalmente tale errore è contenuto attorno a 0.1-0.2 gon, attraverso una livella sferica solidale al corpo della stadia. ε ω l Fig. 10.9 – Errore di verticalità della stadia. Una seconda causa che condiziona l'errore di lettura σ L della stadia è il metodo di interpolazione della lettura. A parte i metodi di lettura elettronica, l'interpolazione di lettura può essere a stima o micrometrica. Nel primo caso si utilizzano stadie in legno e, se la distanza tra strumento e stadia non supera i 40-50 m, possiamo ritenere che lo sqm di lettura sia σ L= ± 0.1 cm, un decimo dell'intervallo di graduazione della stadia. Nel caso di utilizzo di micrometro a lamina piano parallela lo sqm di lettura è, per questa distanza, di 1/10 dell'errore precedente, cioè σ L= ± 0.1 mm, ma può essere ulteriormente ridotto avvicinando la stadia allo strumento: sperimentalmente si è visto che σ L, per distanze comprese fra i 5 ed i 50 m cresce con la radice quadrata della distanza. Queste ultime stadie sono dotate di due graduazioni (fig. 10.10), sfalsate fra loro della metà dell'intervallo di graduazione, ad esempio di 0.5 cm e numerate in altro modo. Eseguendo la doppia lettura alle due graduazioni, si evitano errori grossolani di lettura e si mediano quelli accidentali. Queste stadie vengono utilizzate abbinate a strumenti dotati di un reticolo a cuneo, come quello illustrato in figura 10.11, ed un micrometro a lamina piano parallela, che permette di spostare l'immagine del reticolo sino alla collimazione eseguita come si vede nella stessa figura. 42 LIVELLAZIONI 1 31 Fig. 10.10 – Base di una stadia invar. La lastra piana, di spessore opportuno, è stata studiata per fare sì che all'escursione massima, la deviazione che può subire l'immagine per una rotazione del tamburo T sia di ± 0.5 cm nel caso di stadie centimetrate e di ± 0.25 cm nel caso di stadie mezzo centimetrate. LAMINA MICROMETRICA TAMBURO GRADUATO Posizione del reticolo a collimazione avvenuta STADIA CENTIMETRATA Fig. 10.11 – Collimazione di una stadia invar. Il tamburo è generalmente diviso in 100 parti, per cui le letture corrispondenti alle massime deviazioni sono di ± 50 (decimi di mm). L'operatore legge direttamente una di queste parti e si stima una frazione corrispondente ad un centesimo di mm. Le graduazioni sono tali che a lamina verticale la lettura è 50 decimi di mm, sicché per eseguire la lettura è sufficiente sommare sempre la lettura micrometrica alla lettura al centimetro fatta dopo il centramento del reticolo e della livella torica. Il più delle volte il tamburo del micrometro è una piccola corona di cristallo graduato che, illuminata esternamente, è osservata con un microscopio, nel percorso di questo vi è un reticolo, l'oculare è collocato per comodità a fianco dell'oculare del cannocchiale. Le livellazioni di precisione avvengono utilizzando questi accessori, nonché le modalità in parte accennate. 43 LIVELLAZIONI Fig. 10.12 – Tripode d'appoggio della stadia. Lungo la linea di livellazione la stadia viene appoggiata su capisaldi opportunamente predisposti sul percorso, a calotta semisferica in acciaio inossidabile. Nel caso ciò non fosse possibile o conveniente, si utilizzano dei pesanti supporti di ghisa, dotati di tre punte che si conficcano al suolo, su questi è posto un grosso chiodo d'acciaio a testa semisferica. Questi supporti (tripodi), sollevati per una maniglia, si trasportano lungo tutta la linea di livellazione. 10.5 AUTOLIVELLI Gli autolivelli realizzano automaticamente l'orizzontalità dell'asse di collimazione attraverso un meccanismo ottico meccanico chiamato compensatore. Gli schemi costruttivi adottati sono i più disparati e vengono chiamati ottici o meccanici a seconda che il reticolo sia solidale al cannocchiale oppure mobile all'interno dello strumento. È ovvio che il compensatore è dotato di componenti sia ottiche che meccaniche. Il principio che schematicamente è il più semplice è quello adottato nell'autolivello GK1-A della Kern, che utilizza uno specchio (S in fig. 10.13) incernierato al corpo del cannocchiale che rimane sempre verticale, e che è posto a metà della lunghezza focale del sistema obiettivo. L'immagine viene deviata di un angolo uguale e contrario all'inclinazione dell'asse meccanico del cannocchiale, e, messa a fuoco sul reticolo R , viene da qui portata opportunamente all'oculare. Il cannocchiale è a lunghezza costante, così che è presente nel percorso ottico una lente divergente (non visibile nel disegno) che serve a mettere a fuoco l'immagine, cioè a portarla sul piano del reticolo. Ogni meccanismo compensatore deve essere estremamente sensibile per essere altrettanto preciso: ne deriva che le oscillazioni del sistema compensatore potrebbero durare anche parecchi secondi; per ovviare a ciò, questi sistemi sono dotati 44 LIVELLAZIONI di organi di smorzamento che sfruttano le proprietà di un liquido viscoso, un gas od un attrito magnetico. S Reticolo R oculare Fig. 10.13 – Principio di funzionamento dell' autolivello Kern GK1-A. Il dispositivo compensatore entra normalmente in azione per piccole inclinazioni dell'asse meccanico del cannocchiale: è necessario quindi sempre rendere grossomodo orizzontale il piano della traversa grazie ad una livella sferica ad essa solidale (in questi strumenti è ovviamente assente la livella torica). Di solito è possibile far oscillare volutamente il sistema compensatore attraverso un bottoncino esterno opportunamente situato sullo strumento. Questa operazione fatta di tanto in tanto permette di verificare se il trasporto, od altri problemi meccanici hanno causato pericolosi blocchi del sistema compensatore. Altri autolivelli meccanici (fra i più vecchi il livello Salmoiraghi 5190) sfruttano il procedimento meccanico di appoggiare il reticolo sulla base di una massa pendolare rovescia, su cui, a fuoco, si forma l'immagine: lo strumento risulta di forma verticale allungata. Un altro sistema di tipo ottico, adottato nello strumento Zeiss Ni2, devia l'asse di collimazione grazie ad una serie simmetrica di prismi, sospesa pendolarmente nel percorso ottico lungo una biella di un parallelogramma articolato, che consente un solo grado di libertà al sistema. Vi sono infine dei compensatori ottici che deviano l'asse di collimazione grazie ad un pendolo diritto costituito da una piccola asta flessibile, sulla quale è posta come massa un prisma riflettente. Tutti questi sistemi raggiungono l'orizzontalità con sqm che varia da ± 0.1" a ± 2". 10.6 LIVELLI ELETTRONICI Parleremo del livello elettronico Leica Wild Na2000; non è oggi il solo livello elettronico né il primo (circa sette anni prima della sua comparsa la casa Zeiss di Jena propose un livello con metodo di lettura elettronico automatico) ma senza dubbio questo livello è oggigiorno il più diffuso. 45 LIVELLAZIONI Anche qui, come nei teodoliti elettronici occorre chiarire che di digitale ed elettronico vi è solo la lettura alla stadia, rimanendo lo strumento, dal punto di vista meccanico e ottico, un buon autolivello. Il principio di lettura della stadia è simile al principio di lettura di una sequenza di codici a barre, perciò le stadie abbinate allo strumento sono stadie sulle quali è incisa una particolare sequenza codificata. Per quanto premesso lo strumento può anche essere usato abbinato anche a tradizionali stadie graduate. 1 Obiettivo 2 Encoder di messa a fuoco 5 4 6 3 9 8 3 Lente anallattica 2 1 7 4 Spia di controllo compensatore 5 Acquisitore digitale 6 Oculare 7 Sistema compensatore 8 Divisore di immagine Fig. 10.14 – Schema del livello elettronico Leica Wild Na2002. L'idea base è usare la scansione elettronica dell'oggetto. Sinora non era possibile automatizzare le livellazioni geometriche di alta precisione in quanto le sensibilità delle procedure di scansione elettronica erano notevolmente più scadenti delle capacità dell'occhio umano. Gächter, Brauneker, Muller e Göldi furono i primi che riuscirono a stimare, misurare, l'immagine di una stadia, attraverso una procedura elettronica. Una matrice di diodi riceventi il segnale ottico (che prendono il posto dell'occhio dell'osservatore) riconoscono sulla stadia un codice a barre dal quale si riesce a derivare un segnale caratteristico. Una procedura di correlazione all'interno del livello interpreta la forma di questo segnale riuscendo a stimare la distanza dal livello alla stadia e contemporaneamente la lettura alla stadia. I livelli digitali Leica Wild NA2002 e Leica Wild NA3002 hanno le medesime caratteristiche ottiche e meccaniche di un normale autolivello, sicché possono utilizzarsi anche in questo modo abbinandoli a stadie in legno centimetrate od a stadie in fibre ottiche fornite in dotazione; su queste sono incise da un lato le graduazioni in formato binario e dall'altro le graduazioni in formato tradizionale. L'apertura angolare del sistema ottico del livello è 2°, dunque la massima lunghezza della stadia di 3.5 m è visibile a 100 m ed il minimo campo e alla distanza focale minima di 1.8 m, corrispondente a 70 cm sulla stadia. Viene calcolata una distanza approssimata attraverso la lettura di un encoder (2 in fig. 10.14) che misura lo spostamento delle lenti anallattiche tra le distanze focali minima e massima: la distanza dell'oggetto a fuoco varia infatti linearmente con la 46 LIVELLAZIONI posizione di queste lenti. Questa distanza serve a stabilire approssimativamente una scala dell'immagine digitale ricevuta e un campo massimo. Ecco come avviene la misura: l'immagine del codice a barre giunge attraverso le lenti ad un vettore di diodi ricevitori, dopo essere passata da un prisma semi riflettente (8) che devia una parte di luminosità (la componente infrarossa) su un sensore digitale (5) particolarmente sensibile a questa componente, lasciando passare la parte visibile all'occhio umano. Il segnale viene amplificato e digitalizzato, attraverso sensori CCD di 256 pixel, ciascuno dei quali misura otto livelli di grigio. Il sensore è costituito da un vettore di 256 fotodiodi spaziati fra di loro di 25 µm per una lunghezza totale di 6.5 mm. Anche il comportamento del compensatore (7) durante la misura, è registrato da un sensore elettronico. In seguito la tecnica di correlazione determina la posizione dell'immagine rispetto all'orizzontale (stabilita dal compensatore) e la scala dell'immagine rispetto ad un codice campione. Il tutto avviene in un tempo massimo di 3 secondi. Fig. 10.15 – Massimizzazione della funzione di correlazione. La correlazione consiste nel comparare il segnale immagine con un codice di riferimento memorizzato nel livello corrispondente al numero binario inciso sulla stadia. La tecnica permette il calcolo dell'altezza (il filo medio nei livelli tradizionali) e della scala. La differenza di quota tra strumento e stadia rappresenta lo spostamento da dare all'immagine codificata nella ricerca della massima correlazione. La scala da dare al codice memorizzato è proporzionale alla distanza livello-stadia. Il coefficiente di correlazione dipende dunque dalle due quantità d e h: N 1 r (d,h ) = ----- ∑ Q ( y ) P ( d,y + h ) N 10.6 0 47 LIVELLAZIONI dove: d e h sono la distanza e la lettura alla stadia; P è il segnale di riferimento; Q è il segnale misurato; r è la funzione di correlazione da massimizzare; N è la lunghezza con la quale si è discretizzato il segnale binario (256). Per cercare il valore massimo di r (.) (vedi fig. 10.15) considerando di usare un numero discreto di valori di (d , h) compatibile con le precisioni richieste, occorrerebbe in teoria eseguire questi prodotti circa 50.000 volte con tempi di attesa inaccettabili. Si ovvia a ciò con una correlazione fatta a due livelli, grossa e fine. Già la distanza approssimata derivata dall'encoder interno riduce dell' 80% l'area di ricerca; le operazioni si riducono drasticamente limitando la dinamica del segnale da 8 bit ad 1 bit. Il prodotto dei segnali P e Q si esegue con una velocissima operazione binaria xnor1 che consiste nel porre ad 1 il risultato del prodotto per P i = Q i : Pi = Q i ⇒ 1 r (d̃, h̃ ) = r (i, j ) = Q ( j ) xnor P ( i, j ) 10.7 Il segnale di riferimento P nella 10.6 è ovviamente scalato e traslato in funzione di d e di h. Ricavati i valori stimati di d ed h, la correlazione fine utilizza tutti gli 8 bit del segnale ma solo all'interno di una limitata area di ricerca. Siccome l'ampiezza massima e minima del segnale ricevuto e quella del segnale di riferimento sono diverse a seconda della luminosità, la funzione di correlazione viene normalizzata all'interno dell'intervallo [0-1]. Ciò permette anche di capire se si è raggiunta statisticamente una buona correlazione. Il calcolo considera la possibilità di possibili oscuramenti di parte della stadia a causa di ostacoli che possono essere tollerati senza problemi per circa il 20% dell'immagine. Il livello NA3002 differisce in pratica dal livello NA2002 per la densità di ricerca nell’area fine che è maggiore di circa il 40%. 1 La funzione xnor è estremamente rapida: ad esempio l'operazione (è xnor ù)= Γ. Si ha infatti in termini binari: è = 10001010 = carattere ASCII 138 ù= 10010111 = carattere ASCII 151 Γ= 11100010 = carattere ASCII 226 Il valore massimo di (x xnor y) si avrà sempre quando x= y. Lo stesso ragionamento può essere esteso ai numeri di lunghezza superiore ad 1 byte= 8 bit. 48 LIVELLAZIONI 10.7 IL CODICE BINARIO Il codice inciso sulle stadie consiste in una sequenza di intervalli bianco/nero ed è un unico numero binario pseudo stocastico (senza sotto ripetizioni) di 2000 elementi, ciascuno di 2.025 mm, di modo che la stadia più alta che si possa usare è di 4.05 m. La precisione del risultato dipende dal segnale ricevuto, o meglio dal rapporto segnale/rumore e dalla discretizzazione eseguita. Anche la qualità dell’ottica, la precisione del compensatore, hanno ovviamente la loro importanza. Per livellazioni di bassa precisione si possono usare le stadie in fibra di vetro componibili in tre pezzi della lunghezza totale di 4.05 m e di 50 mm di larghezza sino a 100 m di distanza dalla stazione. Per non subire gli effetti della rifrazione asimmetrica, nelle livellazioni di precisione, con la stadia codificata a nastro invar è bene che le distanze non superino i 30 m. Nelle livellazioni di precisione l’effetto calore che sale dal suolo (ballerina) rende tremolante e distorta l’immagine ricevuta. In zone vicine a cantieri od a traffico le vibrazioni influenzano il compensatore. È possibile allora sfruttare la misura ripetuta n volte che permette di ricavare automaticamente il valor medio e la varianza della lettura alla stadia. Per saturare i fotodiodi le condizioni di luminosità variabili fanno sì che i tempi di acquisizione varino da 4 ms a 2s. Se si desidera compiere le operazioni di rilievo in condizioni di luminosità artificiale occorre che lo spettro della luce prodotta comprenda anche le componenti infrarosse. Il software interno permette di riconoscere anche se e dove sono localizzate zone dell’immagine coperte o contrastate da forti ombre. È bene però che, per l’affidabilità della misura, queste zone non siano superiori al 20% dell’immagine. Per discriminare in modo inequivoco la zona oscurata sono necessari solo 70 mm di codice, perciò al di sotto di 5 m di distanza non è possibile che la stadia sia coperta da alcun ostacolo. La risoluzione di misura del sistema è: r=0.1 mm per il livello NA2002 e r=0.01 mm per il livello NA3002; in entrambi i casi la distanza viene misurata con σ =±1 cm al di sotto di 100 m. La ripetività delle misure mostra un andamento degli scarti lineari con la distanza della stadia con costanti 0.6 mm/100m e 0.3 mm/100 m per NA2002 e per il livello NA3000 o in invar (vedi tabella 10.1). Gli strumenti sono dotati di un registratore che permette la memorizzazione di 285 dislivelli o di 500 letture. Gli strumenti sono dotati anche di programmi di controllo strumentale o programmi per particolari misure. Il programma «invert» permette ad esempio di usare lo strumento con stadie «inverse» cioè appese e non appoggiate a capisaldi di livellazione. 49 LIVELLAZIONI Con questi livelli le procedure di rilevo vengono velocizzate in media di almeno il 50% del tempo. Tab.10.1 – Sqm chilometrico dei livelli digitali Leica Wild. σ (mm al km) STADIA A FIBBRE STADIA INVAR NA2002 1.5 0.9 NA3002 1.2 0.4 Tutti i meccanismi compensatori degli autolivelli o dei livelli elettronici possono subire l’influenza del magnetismo terrestre, particolarmente sensibile in zone montuose. Questi primi livelli elettronici non ne erano esenti. La casa costruttrice ha successivamente rimediato all’inconveniente su tutta la gamma strumentale. 10.8 CALCOLO DELL'ERRORE DI SRETTIFICA E RETTIFICA DI UN LIVELLO Condizione di rettifica di un livello è che la tangente centrale alla livella torica sia parallela all’asse di collimazione. Condizione di rettifica di un auto livello è che il compensatore o il sistema di pendolarismi renda orizzontale l’asse di collimazione. Per rettificare un livello od autolivello occorre valutare prima l’errore di srettifica misurando da un estremo un dislivello, e valutando quanto questo differisca dal suo valore noto a priori. Tale valore può essere determinato (con lo stesso livello) con una livellazione geometrica dal mezzo che riduce, teoricamente elimina, gli errori di srettifica. In un livello, verificata la rettifica della livella torica, l’errore di srettifica residuo è dovuto al fatto che asse di collimazione e tangente centrale della livella non sono fra loro paralleli. Siccome ad ogni lettura è indispensabile il centramento della livella, si preferisce ricostruire questo parallelismo agendo sulla vite di rettifica della livella in questo modo. Sui capisaldi altimetrici ben scelti e univoci (pilastrini o tripodi) si è già calcolato il dislivello che chiamiamo ∆'AB . Con livellazione da un estremo, A ad esempio, si legge la stadia sia in A che in B. Si calcola questo secondo dislivello: ∆''AB = lA '' – lB'' . In tale dislivello è concentrato tutto l'errore di srettifica del livello. Data la modesta entità della distanza da A, (infatti, si può trascurare l'errore di curvatura e di sfericità in entrambi i punti) rimane l'errore residuo di srettifica nel punto più distante. L'entità di quest'ultimo è il dislivello corretto (quello calcolato con la livellazione geometrica dal mezzo) meno il nuovo dislivello. Si fa in modo perciò di effettuare in B una lettura l''' tale da ottenere il dislivello corretto cioè lB''' = lA '' – ∆''AB , agendo sulle viti di rettifica della livella torica. 50 LIVELLAZIONI Avendo a disposizione un autolivello si compiono le stesse operazioni preliminari di misura del dislivello e di livellazione da un estremo. Collimando il punto B si esegue la lettura lB'' . Si porta l’asse di collimazione a leggere lB''' agendo con estrema cura e attenzione sulle viti verticali di rettifica del reticolo, spostando cioè l’asse di collimazione. 10.9 LA LIVELLAZIONE TRIGONOMETRICA Le operazioni di inquadramento planimetrico dell'Istituto Geografico Militare, cominciate più di un secolo or sono, furono condotte con teodoliti di precisione e con procedure di misure adeguate all'importanza del vertice di rete. Apparve subito che, mentre si conducevano misure azimutali, i vertici trigonometrici potevano essere inquadrati anche altimetricamente mediante la misura degli angoli zenitali. Per far ciò occorreva risolvere almeno due problemi: quello di potere usufruire di qualche riferimento altimetrico ben materializzato su vertici che spesso sono campanili, tralicci o ciminiere e quello di potere calcolare il dislivello tenendo in debito conto sia della curvatura terrestre che della rifrazione atmosferica, come necessario nelle distanze abitualmente coinvolte nella rete trigonometrica. È soprattutto l'incertezza su quest'ultima variabile che, come dimostreremo, consiglierebbe, se non si hanno misure precise della rifrazione, di non estendere questo metodo a distanze maggiori di 10-12 km. In questo ambito possiamo fare altre importanti ipotesi: Le operazioni di misura di dislivelli fanno riferimento alla superficie del geoide che, per soli scopi planimetrici è approssimabile allo sferoide, all'ellissoide prima ed alla sfera locale poi nell'intorno del campo geodetico. Ipotizziamo che, nell'intorno di 12 km, le superfici equipotenziali siano sferiche ed il geoide sia una sfera di raggio: R = ρ RN con ρ ed R N valori medi dei due raggi di curvatura. Le deviazioni della verticale saranno allora: (ξ , η ) = 0 Ipotizziamo che le quote dei punti A e B (fig. 10.15) siano le distanze di A e B a questa sfera. Poniamo infine che i punti A e B tra i quali si deve calcolare il dislivello appartengano alla rete trigonometrica (da cui il nome del metodo) e quindi la distanza d sia nota o ricavabile. Per il momento evitiamo di considerare, o pensiamo di poter trascurare, la rifrazione atmosferica. 51 LIVELLAZIONI ϕ BA ϕ AB β α A B QB d QA Geoide // sfera locale R δ O Fig. 10.15 – Livellazione trigonometrica reciproca. Se fosse possibile misurare sia φ AB che φ BA, dal teorema di Nepero applicato al triangolo AOB si ricaverebbe: 1 tg --- ( π – ϕ BA + π – ϕAB ) (R + Q B ) + ( R + Q A ) 2 ------------------------------------------------------------ = -------------------------------------------------(R + Q B ) – ( R + Q A ) 1 tg --- ( – π + ϕ BA + π – ϕ AB ) 2 ϕ AB + ϕ BA (Q B – Q A ) tg π – --------------------- 2 1 = tg --- ( – ϕ AB + ϕBA ) ( 2R + Q B + Q A ) 2 dal triangolo OAB si ha poi che ϕAB + ϕBA = π + δ , per cui, sostituendo: Q B + Q A 1 1 - tg π – --- ( π + δ ) ∆Q = tg --- ( – ϕ AB + ϕBA ) 2 R + ------------------- 2 2 2 –1 QA + QB -: ponendo Q M = -------------------2 1 δ ∆Q = tg --- (ϕ BA – ϕ AB ) tg --- 2 ( R + Q M) 2 2 52 LIVELLAZIONI sviluppando in serie la tangente si ha2: d3 d δ δ δ3 δ3 tg ---- ≅ ---- + ------ – … ma δ = --- per cui ------ = -----------3- ≅ 10 –9 R 2 2 24 24 24R d δ trascurando quindi il termine cubico si può approssimare tg --- ≅ -----2 2R Q M 1 ∆Q = d 1 + -------tg --- (ϕ – ϕ AB ) R 2 BA 10.8 In questa formula appare evidente che non occorre conoscere Q M con eccessiva precisione. Infatti se Q B fosse noto approssimativamente con ± 10 m, il termine –6 (Q M /R ) sarebbe già preciso con σ = ± 10 ⁄ 6 ⋅ 10 . Anche se Q M fosse meno precisa si potrebbe, dalla formula 10.8, ricavare il dislivello ∆Q con 2 iterazioni. Il dislivello così calcolato è inteso da centro a centro dello strumento. Se si cerca il dislivello tra i due punti a terra, occorre sommare l'altezza di uno strumento e togliere quella dell'altro, o quella della mira che eventualmente può essere collocata sull'altro punto. Q M 1 tg --- (ϕ – ϕ AB ) + h A – h B ∆ AB = d 1 + ------- R 2 BA 10.9 In realtà spesso i punti sono talmente distanti da non riuscire ad intravedere nemmeno il treppiede, e la collimazione è fatta su particolari più grandi e ben visibili, come guglie di montagne, parapetti di finestroni o gronde. Se la livellazione è fatta da un estremo e sull'altro non vi è segnale o strumento è ovvio che hB=0. Livellazione trigonometrica da un solo estremo Riprendendo la 10.8 nell'ipotesi di non potere misurare ϕ BA , si sostituisce a ϕ BA : ϕ BA = ( π + δ – ϕ AB ) e si ottiene: Q M 1 tg --- ( π + δ – ϕ A – ϕ A ) ∆Q = d 1 + ------- R 2 Q M δ - tg ϕ – --- ∆Q = d 1 + ------- R A 2 Q M d ∆Q = d 1 + -------- ctg ϕ A – ------ 2R R 10.10 2 La conoscenza di δ si ha anche da ϕ e ϕ ma con un errore più alto, pari a quello degli ecclimetri, A B cioè di circa σ ≅ ± 5 cc . 53 LIVELLAZIONI Livellazione reciproca simultanea in presenza della rifrazione Si faccia l'ipotesi reale di non più astrarre dalla rifrazione. Gli angoli zenitali misurati ϕ (apparenti) saranno più piccoli di quelli reali Z di una quantità ε che si può empiricamente dimostrare essere proporzionale, attraverso il coefficiente K di rifrazione, alla distanza d. Si ha cioè: δ ε = K --- 2 Il coefficiente di rifrazione K è variabile con la latitudine, con la quota, ed ha pure variazioni diurne. Pur non potendo parlare di «costante K», il suo valore è comunque oscillante in un intervallo compreso tra 0.08 e 0.22. Vediamo ora l'influenza della rifrazione sulla 10.8, con le solite ipotesi sulla conoscenza di R, d, ϕ AB , ϕ B A e le ulteriori ipotesi sulla rifrazione: εA = KA δ ⁄ 2 εA = KB δ ⁄ 2 KA + KB 2 ε A ≈ ε B ⇒ K = ------------------- Partendo dalla 10.8 così riscritta: Q M 1 ∆Q = d 1 + -------tg --- (Z – Z AB ) R 2 BA si ricava: Q M 1 ∆Q = d 1 + -------tg --- (ϕ – ϕ AB ) R 2 BA identica alla stessa 10.8 anche in caso di rifrazione. Partendo dalla 10.10 e sostituendo al posto dell’angolo ϕ A B , l’angolo ϕ A B + ε A si ottiene: Q M d - ctg ϕ AB + εA – ------ ∆Q = d 1 + ------- 2R R con: d δ εA = K --- = K -----2 2R Q M 1–K - ctg ϕ AB – ------------- d ∆Q = d 1 + ------- 2R R ( 1 – K ) ⁄ ( 2R ) d è dell’ordine di pochi secondi centesimali, per cui, ricordando lo sviluppo della cotangente: 1 - + ε 2 ... ctg (α + ε ) ≅ ctgα – ε ----------sin2α 54 LIVELLAZIONI Q M 1–K 1 ctgϕ AB + ------------- d 2 ----------------∆Q ≅ d 1 + -------2 2R R sin ϕ AB 10.11 Come si ricava l'indice di rifrazione K da misure reciproche La determinazione del coefficiente di rifrazione K può essere utile per calcolare il dislivello verso altri vertici trigonometrici oltre a quelli su cui necessariamente sono state fatte osservazioni reciproche, nell’ipotesi che il valore sia abbastanza stazionario nel tempo e nello spazio. Z BA εΒ Z AB ϕAB ϕBA B εΑ A d δ O Fig. 10.16 – Livellazione trigonometrica reciproca in presenza di rifrazione. Nella figura 10.16, dal triangolo ABO si ricava: ϕ AB + ε A + ϕ BA + ε B = π + δ δ ϕ AB + ϕ AB + ( K A + K B ) --- = π + δ 2 KA + KB R - = (ϕ AB + ϕ BA – π ) ---K = -----------------d 2 Se la distanza tra i punti non è eccessiva e le misure sono pressoché contemporanee, si può ritenere: KA ≅ KB = K 55 LIVELLAZIONI Precisione della livellazione trigonometrica Applicando la formula di propagazione della varianza alla 10.11: Q M 1–K 1 ctgϕ + ------------- d 2 ----------∆Q = d 1 + ------- 2R R sin2ϕ ove abbiamo posto ϕ = ϕ AB , valutiamo quale sarà l'errore quadratico medio del dislivello. Le variabili indipendenti nella formula sopra indicata sono: – la distanza d – l'angolo zenitale ϕ – il coefficiente di rifrazione K. Se si fanno le seguenti semplificazioni: ϕ ≅ 90° (100 gon) per cui: 1 ----------- ≅ 1 (ammissibile anche perché moltiplica un termine già piccolo) sin2ϕ e: QM -------- ≅ 0 R si ottiene: ( 1 – K )2 - σ 2 + ------------ σ 2 + --------- σ 2 σ ∆2Q ≅ ctg 2ϕ + d 2 ------------------ R 2 d sin4ϕ ϕ 4R 2 K d2 d4 Definiamo il termine: σ d ------- = pd d –5 (precisione delle distanze) e ipotizziamo che pd = 10 . Le tre parti che compongono σ ∆Q sono: d d - σϕ ⊕ ------ σ K σ ∆Q = d ctgϕ pd ⊕ ------------2 2R sin ϕ 2 Nella formula precedente è stata indicata con ⊕ la somma vettoriale delle tre componenti indipendenti. –5 Ad esempio per pd = 10 , σ K = ± 0.01 , σϕ = ± 1 mgon , si può ricavare la tabella 10.2 che fornisce l'errore quadratico medio del dislivello ottenuto con la livellazione trigonometrica. Si nota che per distanze inferiori a 10 km σ ∆ cresce linearmente secondo: σ ∆ = ± 1.2 cm ⋅ d ( km ) ; oltre il limite di 10 km è preponderante σ Κ e la funzione non è più lineare. 56 LIVELLAZIONI Tab.10.2 – Precisione della livellazione trigonometrica. d 500 m 1000 m 5 Km 10 Km 20 Km d ctgϕ pd 0.08 cm 0.16 cm 0.8 cm 1.6 cm 3.2 cm d σϕ 0.50 cm 1.00 cm 5.0 cm 10.0 cm 20.0 cm d2 ------ σ K 2R 0.02 cm 0.08 cm 2.0 cm 8.0 cm 32.0 cm somma vettoriale ________ ________ ________ ________ ________ σ∆ = ± 1.0 cm 5.4 cm 12.9 cm 37.9 cm DISTANZE 0.5 cm 10.10 LA LIVELLAZIONE ECCLIMETRICA UTILIZZANDO TEODOLITE E DISTANZIOMETRO Indicando con: s = «slope» la distanza inclinata misurata col distanziometro (s massima < 1 km oppure < 500 m) ϕ = l'angolo zenitale letto collimando il segnale angolare posto in B. Per queste distanze, nelle quali è trascurabile in genere la rifrazione, assumiamo ϕ uguale alla distanza zenitale z h = l'altezza strumentale, cioè la distanza tra il centro strumentale (intersezione dei tre assi principale, secondario e di collimazione) ed il punto A l = l'altezza della palina o del treppiede misurata dal punto B al centro del segnale angolare dt = la distanza «topografica», misurata cioè nel piano topografico che passa per A. dalla figura 10.17 appare evidente che: ∆AB = s cosϕ + h – l = d t ctgϕ + h – l S ϕ ϕ B S COS ϕ ∆ AB h h A dt Fig. 10.17 – Livellazione ecclimetrica. 57 LIVELLAZIONI Volendo utilizzare questa livellazione sino a 1000-1500 m, con errori dell’ordine del cm occorre considerare per lo meno la correzione di sfericità, cioè: s 2 cosϕ 2 ∆AB = s cosϕ + h – l – ------------------2R sin2ϕ 10.12 Precisione della livellazione ecclimetrica Facendo l'ipotesi che: σ -------d- = pd = ± 10 –5 d σ ϕ = ± 0.5 mgon ( ± 5 cc ); si riportano nelle due tabelle seguenti i valori dei singoli errori (sqm) relativi rispettivamente ad angoli zenitali ϕ = 90 gon e ϕ = 80 gon. ϕ =90 gon ϕ =80 gon σ ϕ = ± 5 cc (0.5 mgon) σ ϕ = ± 20cc (2 mgon) 100 m 500 m 1 km 100 m 500 m 1 km dt ctgϕ σd 0.0 cm 0.0 cm 0.2 cm 0.0 cm 0.0 cm 0.2 cm dt -----------σ sin2ϕ ϕ 0.1 cm 0.4 cm 0.8 cm 0.3 cm 1.6 cm 3.2 cm σ∆ = ± 0.1 cm 0.4 cm 0.9 cm 0.3 cm 1.6 cm 3.2 cm dt ctgϕ σd 0.0 cm 0.0 cm 0.3 cm 0.0 cm 0.1 cm 0.3 cm dt -----------σ sin2ϕ ϕ 0.1 cm 0.4 cm 0.9 cm 0.4 cm 1.7 cm 3.5 cm σ∆ = ± 0.1 cm 0.4 cm 1.0 cm 0.4 cm 1.7 cm 3.6 cm 58 LIVELLAZIONI 10.11 INSERIMENTO DI UNA DISTANZA MISURATA IN CARTOGRAFIA Dati i seguenti elementi misurati: – la distanza tra due punti P1 P2 (fig. 10.18) misurabile con un EODM e depurata dalle influenze atmosferiche (temperatura, pressione ed umidità relativa) – l'angolo zenitale Z (depurato dalla rifrazione) – le coordinate approssimate del punto di stazione P1(ϕ , λ, h1) il problema è il passaggio dalla distanza misurata «in linea d'aria» alla distanza che si deve leggere su una carta topografica ad una certa scala. I passaggi elementari sono: a. Proiezione (detta anche riduzione) della distanza alla superficie di riferimento che può avvenire con questi sottopassaggi: • riduzione all'orizzonte • riduzione al geoide • riduzione all'ellissoide • riduzione alla sfera locale b. Riduzione o passaggio della distanza dalla superfici e di riferimento alla carta. Facciamo l’ipotesi di essere nel campo geodetico (per il trattamento planimetrico delle distanze). In questo ambito possiamo approssimare il geoide ad una sfera locale di raggio R = ρ R N + N , con N valore medio dell’ondualazione del geoide. P2 Z l δ P1 A D h1 C Sfera loc. E ∆h h1 B R R δ O Fig. 10.18 – Riduzione di una distanza alla sfera locale. 59 LIVELLAZIONI Osservando il triangolo OP1P 2 si ha: OP 2 = R + h 1 + ∆h Applicando la formula di Carnot: l2 = ( R + h 1 ) 2 + ( R + h 1 + ∆q ) 2 – 2 ( R + h 1 ) ( R + h 1 + ∆h ) cosδ da cui: l2 – ∆h 2 cos δ = 1 – -------------------------------------------------------2 ( R + h 1 ) ( R + h 1 + ∆h ) 10.13 la soluzione è: l0 = Rδ ma ciò richiede sia noto il dislivello ∆h (ad esempio attraverso una livellazione trigonometrica). In alternativa è possibile ricavare: EP ∆h = CD + DP 2 = [ OD – ( R + h 1 ) ] + ---------2cosδ R+h lcos Z ∆h = --------------1 – ( R + h 1 ) + -------------cosδ cosδ ( R + h 1 ) ( 1 – cos δ ) + lcos Z ∆h = ----------------------------------------------------------------cosδ 10.14 Nel caso in cui occorra considerare anche la rifrazione, la 10.13 diviene: ( R + h 1 ) (1 – cosδ ) + lcos (ϕ + K δ ⁄ 2 ) ∆h = ----------------------------------------------------------------------------------------cos δ 10.15 Si arriva alla soluzione mediante processo iterativo sulle formule 10.13 e poi 10.14, oppure, in presenza di rifrazione, tra la 10.13 e la 10.15. δ ε = K --2 lp ≅ l per ε piccoli ( K = 0.14 ) ε < 8mgon lp indica la «lunghezza percorsa» dall'onda ottica. Per inserire l0 in cartografia, se l0 è inferiore a 10 km, si ricava dapprima il modulo di deformazione m: 1 x2 m = 1 + --- ----2- ⋅ 0.9996 ( valutando ρ, R N e N nel punto medio tra A e B ) 2R 60 LIVELLAZIONI P2 Z l δ P1 A D h1 C Sfera loc. E ∆h h1 B R R δ O Fig. 10.19 – Inserimento di una distanza in cartografia in presenza di rifrazione. Il valore lc che si deve riportare sulla carta sarà: ml lc = -------0n lc = distanza cartografica; n = 1 ⁄ scala della carta Per l0 > 10 km si usa la formula per elementi finiti: x 21 + x 1x 2 + x 22 m = 1 + ------------------------------- ⋅ 0.9996 6R 2 Si propone il seguente esercizio. Noti P 1 ≡ ( ϕ = 45°28′3822.36; λ = 9°13′39″.57; q 1 = 123.12m ) Ds = l = 10km; ϕ = 88°98262; Ricavare ∆ q ed K = 0.14, N = 40m l0 . 61 LIVELLAZIONI 10.12 INSERIMENTO DI UNA DISTANZA MISURATA NOTE LE QUOTE DEI DUE ESTREMI Nel caso in cui siano note le quote degli estremi,che chiamiamo Q 1 e Q 2 e le distanze inclinate l , partendo dalla formula di Carnot si ottiene: l 2 = ( R + Q 1 ) 2 + ( R + Q 1 + ∆Q ) 2 – 2 ( R + Q 1 ) 2 cos δ – 2 ( R + Q 1 ) ∆Q cos δ l 2 = 2 ( R + Q 1 ) 2 + ∆Q 2 + 2 ∆Q ( R + Q 1 ) – 2 ( R + Q 1 ) ∆Q cos δ – 2 ( R + Q 1 ) 2 cos δ l 2 = 2 ( R + Q 1 ) 2 ⋅ ( 1 – cos δ ) + [ ∆Q 2 + 2 ∆Q ( R + Q 1 ) – 2 ∆Q ( R + Q 1 ) cos δ ] e approssimando (1– cosδ ) a l 2 ⁄ 2R : l2 l 2 = ( R + Q ) 2 ----02- + ∆Q 2 + 2 ∆Q ( R + Q 1 ) ( 1 – cosδ ) R l2 l 02 ( R + Q 1 ) 2 l 02 2 ----- + ∆Q + ∆Q ( R + Q 1 ) 2= -----------------------------R R2 ( R + Q 1 ) 2 ∆Q 2 ∆Q ( R + Q 1 ) l2 -----2 = ----------------------- + ---------- + ----------------------------l0 R2 l 02 R2 2R/ Q 1 Q 12 ∆Q 2 ∆Q ( R + Q 1 ) R/ 2 l2 -----2 = --------2- + ---------------- + ------2- + ---------- + ----------------------------l0 R/ R2⁄ R l 02 R2 Q 2 ∆Q 2 ∆Q ( R + Q 1 ) 2Q l2 -----2 = 1 + ---------1- + ------21- + ---------- + ----------------------------R l0 R l 02 R2 Ci rendiamo conto che al secondo membro i termini dopo il numero uno sono abbastanza piccoli. Vogliamo ricavare l ⁄ l0 , cioè la radice del secondo membro. Sviluppiamo in serie binomiale: Q Q 2 ∆Q 2 ∆Q ( R + Q 1 ) l ---- ≅ 1 + ------1- + --------1-2 + ----------2- + ----------------------------l0 R 2R 2 l0 2R 2 Q ∆Q 2 ∆Q ∆QQ 1 Q 12 l ---- ≅ 1 + ------1- + ----------2- + -------- + -------------- + --------2l0 R 2R 2R 2 2 l0 2R 10.16 Trascurando gli ultimi due termini si ha: Q ∆2 Q ∆Q ( l – l0 ) = l0 ------1- + ---------2- + -------- R 2 l0 2R 10.17 In seguito si procede come già visto per passare da l0 a lc . Si può facilmente notare che la formula porta allo stesso risultato se viene applicata a P2. 62 11. LA MISURA DIRETTA DELLA DISTANZA 11.1 I DISTANZIOMETRI (EDM/EODM) La misura delle distanze con i distanziometri ad onde La misura delle distanze con precisioni paragonabili a quelle che da oltre un secolo sono tipiche delle misure angolari è sempre stato un problema di non facile soluzione. Ciò era dovuto fondamentalmente a dover attraversare il terreno morfologicamente più o meno accidentato con apparati che a causa delle precisioni richieste debbono essere abbastanza complessi. L’operazione di misura era lunga, laboriosa, suscettibile di errori sistematici. La misura avveniva spesso per via indiretta con metodi telemetrici o stadimetrici ma la precisione era ancora insoddisfacente. Nel 1933 il sovietico Balaicov brevettò un distanziometro ad onde ed il connazionale Lebedev nel 1938 ne costruì un prototipo. Nel 1943 lo svedese Bergstrand costruì il primo strumento commerciale: il «Geodimeter», con portata fino a 10 km. Nel dopoguerra il sudafricano Wadlei inventò infine il primo distanziometro a microonde (MDM) (chiamato Tellurometer) con portata sino a 150 km e preci–6 sione 2 ⋅ 10 per queste portate. Questi strumenti erano ancora molto ingombranti, poco precisi e il metodo di misura era relativamente lento, ma il passo in avanti formidabile. La misura elettromagnetica della distanza con distanziometri (EDM = Elettromagnetic Distance Meter) può avvenire attraverso strumenti che impiegano come onde portanti le onde luminose EODM (Elettro Optical Distance Meter) o che impiegano onde centimetriche (MDM = Micro wave Distance Meter). Possiamo distinguere poi gli EDM che prevedono la misura dello sfasamento tra l'onda emessa e quella ricevuta (vedi figura 11.1a) e quelli che prevedono la misura di tempi trascorsi tra due impulsi o tra due treni d’onda opportunamente codificata (fig. 11.1b). Questo secondo metodo è teoricamente più semplice ma, sino a qualche tempo fa, difficile da attuare per la scarsa precisione con la quale era possibile misurare questi brevissimi intervalli di tempo. 63 LA MISURA DIRETTA DELLA DISTANZA Il vantaggio principale è che una grande quantità di potenza, concentrata in un ristrettissimo intervallo di tempo δ t , permette di superare grandi distanze (o piccole distanze senza la necessità di un prisma retro riflettore). Anche il consumo di energia è modesto. ∆ϕ fig. 1.a δt fig. 1.a ∆t Fig. 11.1a – 11.1b – Metodi per la misura della fase o sfasamento. In entrambi i metodi la misura viene ripetuta in genere qualche migliaio di volte sicché è possibile ricavare lo scarto quadratico medio che, (essendo tutte le misure eseguite entro pochi secondi) non dipende in senso stretto dalle variazioni ambientali ma può considerarsi un errore accidentale. I distanziometri elettro ottici EODM Questi distanziometri sono i più diffusi; il concetto di funzionamento (fig. 11.2) è quello di emettere una radiazione ottica sulla lunghezza d'onda dell'infrarosso vicino, (λ =0.78 µ m) di modularla e di trasmetterla verso un prisma retro riflettore; quest’ultimo riflette una parte dell’onda verso la parte ricevente dell’EODM che misura la differenza di fase tra l’onda emessa e quella ricevuta. Questo sfasamento misurabile è funzione del doppio della distanza tra il distanziometro e il prisma. Nell’EODM sono dunque presenti due parti, una trasmittente ed una ricevente. L’esigenza di concentrare l’energia per superare grandi distanze ed avere un buon segnale di ritorno, fa sì che si utilizzino onde infrarosse coerenti (laser), l'esigenza di poterne discriminare la fase con precisione, suggerisce di modulare queste onde con frequenze proprie delle onde decametriche o metriche, infine la necessità di far ritornare buona parte del segnale dal punto di misura verso la stazione fa sì che si usino prismi particolari (e non semplici specchi). Il metodo della misura della fase Da un oscillatore campione si trasmette verso B un'onda elettromagnetica infrarossa modulata con precisione. Una porzione dell'onda riflessa dal prisma posto sul punto B torna al ricevitore che in genere è un corpo unico col trasmettitore perché governato dallo stesso oscillatore. Lo sfasamento tra l’onda trasmessa e l’onda ricevuta sarà funzione di D 0. 64 LA MISURA DIRETTA DELLA DISTANZA Errore. L'origine riferimento non é stata trovata. Trasmettitore Punto di misura EODM Ricevitore Stazione Prisma riflettente d1 D0 A d2 B Fig. 11.2 – Principio della misura della distanza con gli EDM. La distanza AB sarà: AB = d 1 + D 0 + d 2 11.1 L’onda elettromagnetica emessa è modulata in intensità I secondo la legge: I = I 0 sinω ( t 0 + ∆t ) = I 0 sin (ϕ 0 + ∆ϕ ) 11.2 dove ω t 0 = ϕ 0 è la fase iniziale, ∆ϕ = ω ∆t è lo sfasamento ed ω è l’impulso. In assenza di rifrazione si ha: 2π λ --- = -----ω c 11.3 cioè: 2π ∆ϕ = ω ∆t = ------ c ∆t λ 11.4 e: λ ∆ s = c ∆t = ∆ϕ ------2π 11.5 La 11.5 mette in luce le due quantità misurabili: ∆ t nel caso degli EDM ad impulsi, ∆ϕ nel caso degli EDM a misura di fase; da entrambe si ricava ∆ s. Seguiamo per ora questo secondo cammino: essendo ∆ s il doppio del percorso D0 a meno di un certo numero di lunghezze d’onda si ha: ∆ϕ 2D 0 = n λ + -------- λ 2π 11.6 cioè: λ λ ∆ϕ AB = D = n --- + --- -------- + d 1 + d 2 2 2 2π 65 LA MISURA DIRETTA DELLA DISTANZA λ λ ∆ϕ AB = D = n --- + --- -------- + d 1 + d 2 2 2 2π 11.7a λ AB = D = n --- + L + d 1 + d 2 2 11.7b Il numero intero n si chiama ambiguità. I problemi pratici di misura consistono allora nel ricavare ∆ϕ con precisione e nel determinare n con affidabilità. Le frequenze, quindi le lunghezze d’onda generate, hanno stabilità (precisione) di –6 2 ÷ 5 ⋅ 10 , cioè di qualche ppm (parte per milione ovvero mm/km). La frequenza emessa potrebbe avere anche stabilità superiore ma tale precisione –6 risulta inutile se non è possibile stimare in maniera più precisa di 10 l’effetto della rifrazione atmosferica. La misura dello sfasamento avviene con uno strumento che chiamiamo sinteticamente discriminatore di fase. Per rendere omogenee le precisioni di misura è bene che L sia misurata con incertezza minore od uguale al contributo della parte non modellabile della rifrazione atmosferica. –3 Considerando che i discriminatori hanno precisione k = ± 10 : 1 λ λ σ L = ± σ∆ϕ ------ ---- = k ---2π 2 2 11.8a λ σ L = ± ( 3 ÷ 5 ) ⋅ 10 –4 ---- 11.8b 2 Supponendo nelle 11.7 privi di errore i termini n λ ⁄ 2 , d1 e d2 si ha che σ D = σ L cioè volendo spingere σ D ai valori su esposti, cioè σ D = 5 ⋅ 10 D : –6 5 ⋅ 10 λ --- = 5 ⋅ 10 D 2 2D λ = --------100 –4 –6 e per distanze D di 1 km risulta λ ≅ 20 m . Precisione degli EDM La precisione degli EDM si valuta attraverso due costanti c 0 e c 1 dette appunto costanti di precisione del distanziometro che dipendono dalla risoluzione minima di misura e dalla stabilità di frequenza rispettivamente. Le case costruttrici forniscono questi valori ricavati dopo numerosi test di laboratorio ma soprattutto da misure sul campo eseguite secondo norme standardizzate. Si è soliti scrivere: σD = ±( c0 + c1 D ) 66 LA MISURA DIRETTA DELLA DISTANZA I valori più comuni sono: c 0 = 1 ÷ 5mm; c 1 = 1 ÷ 5 ⋅ 10 –6 ( 1 ÷ 5ppm ) I valori migliori sono c 0 =1 mm nei distanziometri che usano il metodo di misura della fase e c 1 = 1 ⋅ 10 –6 negli EDM che sfruttano il metodo di misura ad impulsi. Il Mekometro fa eccezione a questa regola empirica generale. La temperatura interna all’elettronica è rivelata da un termostato che permette di tener conto delle variazioni termiche. In alcuni casi lo strumento è dotato di un secondo termostato per rilevare la temperatura dell’ambiente esterno che può essere utile per scopi che vedremo in seguito. La stabilità di frequenza dipende anche dall’invecchiamento del quarzo che modifica la frequenza di 1 ppm nel primo anno di vita e di circa 2 ppm in 8-10 anni. Misura delle ambiguità n con due frequenze vicine negli EODM Se ipotizziamo di misurare la distanza modulando l'onda infrarossa con due frequenze di lunghezza d’onda λ 1 e λ 2 prossime, in modo tale che l'ambiguità n sia uguale per entrambe le misure della distanza D , si potrà esprimere la distanza D attraverso: λ λ D = n ------1 + L 1 = n ------2 + L 2 2 2 11.9 dove L1 e L2 sono le parti frazionarie di λ cioè: ∆ϕ 1 λ 1 L 1 = -------------4π e ∆ϕ 2 λ 2 L 2 = -------------4π Entrambe le quantità sono misurabili dal discriminatore. Si ricava allora: ( λ 2 – λ 1) - = L2 – L1 n ⋅ -------------------2 ( λ 2 > λ 1) 11.10 Tale ambiguità è nota con certezza sino ad una distanza Dlim, detta distanza limite per cui le ambiguità non sono più identiche: λ λ D lim = n ------1 = ( n + 1 ) ------22 2 11.11 cioè: λ 2 n = --------------λ 1 – λ2 11.12 che sostituita nella 11.11 fornisce: λ λ 1 2 D lim = ----------------------2 ( λ 1 – λ 2) 11.13 67 LA MISURA DIRETTA DELLA DISTANZA Un secondo problema è l’affidabilità del valore di n ricavato dalla 11.10: il risultato di questa espressione non è un numero intero. Si accetta che differisca dall’intero di una quantità massima pari a 0.2. Per la precisione, ipotizzando che 3 σ n = ± 0.2 : 1 3 σ n ≤ --- ( 0.2 ) = 0.067 11.14 propagando la varianza nella 11.10 , supponendo note con certezza λ 1 e λ 2 , poniamo: σ L1 = σ L2 = σ L = cos t 2 2 σ n = ± ---------------- σ L λ 1 – λ2 11.15 che nell’ipotesi 11.14 risulta: 3 2 2 σ L ------- ≤ ( λ 1 – λ 2 ) 0.2 cioè: ( λ 1 – λ 2 ) ≥ 42.4 σ L 11.16 Se ad esempio si assume σ L = ± 5 mm e λ 1 = 20 m , dalla 11.16 si ottiene λ 2 = 19.788 m e dalla 11.11 D lim = 933 m . Misura dell’ambiguità n col metodo delle decadi Questa misura consiste nell’utilizzo di più lunghezze d’onda multiple di un fattore 10 o 100. Si sceglie ad esempio: λ 1 = 2000m, λ 2 = 20m. Con ciò, per distanze minori di λ i ⁄ 2 si ha automaticamente n = 0. Attraverso la 11.8 e la 11.9 si ricava lo scarto quadratico medio della distanza per ogni lunghezza d’onda utilizzata λ1 o λ2. Si ha, per una distanza massima D di 1 km: σ λ = ± 0.5m per λ 1 e σ λ = ± 0.5cm per λ 2 e σ D = ± 0.25m σ D = ± 2.5 mm Facciamo l’ipotesi di dover misurare una distanza D di 728.46m. Con λ 2 si determina la distanza stimandola con l'affidabilità del metro, il che equivale a calcolare l’ambiguità per l’uso della successiva λ 2. La quantità L 1 della 11.7 vale, a seconda dei casi: L' = 728.68 m ± 0.25m L'' = 8.457 m ± 2.5mm _______________ D = 728.46 m 68 LA MISURA DIRETTA DELLA DISTANZA La misura dello sfasamento nei moderni strumenti avviene con l’accuratezza riportata nella 11.8b. Nel Distomat DI 1001, ad esempio, che usa il metodo delle decadi, con λ1= 4000 m si coprono distanze limite di 2000 m con affidabilità migliore di 1 m e, con λ2 = 40 m, si ottiene la risoluzione sub centimetrica desiderata. Misura dell’ambiguità con due frequenze prossime e la terza maggiore È il metodo adottato ad esempio nello strumento Leica KERN DM 504 che utilizza: λ 1= 2000 m, λ 2= 1980 m e λ 3= 20 m. Il metodo combina i vantaggi dei due metodi precedenti in quanto con le due frequenze prossime ritrova un valore della distanza sufficientemente approssimato per il calcolo dell’ambiguità (si verifichi ciò utilizzando la 11.8); con la terza frequenza più elevata avviene la misura fine. Con l’utilizzo di λ 1 e λ 2 la distanza limite fornita dalla 11.11 risulta di 99 km, ben superiore alla portata strumentale. In sintesi, con λ 1 e λ 2 si ottiene la misura della distanza con incertezza di 0.3 m, dopo aver ricavato il numero di ambiguità decametriche, con λ 3 si misura la distanza con incertezza di ± 0.3 cm. L’onda portante e l’onda modulante Nella trasmissione dell'onda, l’energia dispersa dall’apparato trasmittente si distribuisce su superfici proporzionali al quadrato della distanza; è necessario che una parte dell'energia ritorni alla parte ricevente in quantità sufficiente a misurare la fase o i tempi di ritorno. Questo si ottiene vantaggiosamente usando onde ottiche λ =(0.3 ± 1)µm, più vantaggiosamente con l’uso di luce coerente (laser). Spesso la scelta dell’infrarosso vicino (λ = 0.85µm) migliora il segnale di ritorno in condizioni di visibilità (del campo dell’occhio umano) non eccellenti (deboli foschie ad esempio). Con l’uso del laser si può anche concentrare una discreta potenza in piccoli angoli solidi diminuendo così il consumo energetico dell'apparato. Il problema è che, per discriminare fasi o misurare tempi di ritorno del segnale con precisione sufficiente, occorrono lunghezze d’onda metriche e non micrometriche. La soluzione adottata consiste nel modulare la portante ottica con lunghezze d'onda metriche o decametriche. La modulazione del segnale ottico può avvenire in ampiezza (negli EODM), in frequenza (per le microonde degli MDM), od in polarizzazione. La modulazione più semplice o modulazione diretta utilizza i fotodiodi all’arseniuro di gallio GaAs che hanno la proprietà di emettere una luce infrarossa (λ =0.85µm) con energia proporzionale alla corrente che li attraversa. E = KI 11.17 Questa corrente può essere variata alla frequenza corrispondente alle lunghezze d’onda metriche e decametriche necessarie alla misura delle distanze, ottenendo 69 LA MISURA DIRETTA DELLA DISTANZA così un segnale luminoso modulato in ampiezza. Nei distanziometri a laser Elio-Neon la modulazione avviene in modo indiretto, a valle del segnale ottico prodotto attraverso un oscillatore e per mezzo del fenomeno della birifrangenza. Operazioni sulle onde ricevute e trasmesse La misura dello sfasamento, o del tempo di ritorno dell’onda, avviene attraverso alcuni circuiti governati dallo stesso «orologio», cioè dallo stesso circuito oscillatore; ciò limita gli errori di instabilità di frequenza. Nel caso si utilizzino stazioni totali, nel medesimo cannocchiale devono essere convogliati i segnali trasmessi e dallo stesso devono essere prelevati quelli ricevuti, ne consegue una complessità notevole di costruzione, dovuta anche all’attenzione da usare affinché i due segnali non interferiscano in alcun modo. In nessun caso il segnale di alta frequenza (AF) viene interpretato direttamente da un discriminatore di fase ma entra prima in un circuito miscelatore-convertitore che lo trasforma in un segnale a bassa frequenza (BF) ad esempio a 6 kHz, pilotato dallo stesso quarzo orologio che genera l’onda AF. A valle di questa conversione le vie seguite nella misura dello sfasamento possono essere due: a. utilizzare un discriminatore «classico», costituito da un circuito trigger, da un generatore di impulsi e da un contatore di impulsi b. trasformare il segnale da analogico a digitale con un convertitore A/D ed utilizzare a valle un contatore (questa è la soluzione più moderna). B.F. 6 k Hz TRIGGER λ0 = λ / 2500 Fig. 11.3 – Campionatore ad onde quadre. TX Generatore C. I. Impulsi RX MISCELATORE λ= λ 0 / 2500 Fig. 11.4 – Misura dello sfasamento. Nelle figure 11.3 e 11.4 osserviamo il funzionamento del discriminatore: i segnali AF emessi e ricevuti vengono trasformati in segnali BF, attraverso un convertitore (dividendo la frequenza ad esempio per 2500), dal circuito convertitore 70 LA MISURA DIRETTA DELLA DISTANZA entrano in un circuito trigger che li trasforma in segnali ad onda quadra della stessa frequenza e dello stesso sfasamento. Il segnale emesso attiva un generatore di impulsi ed il segnale ricevuto lo disattiva. Il generatore emette impulsi ad alta frequenza, in genere a quella fondamentale, che nell'esempio ha lunghezza d’onda λ = λ 0 / 2500. Il risultato è una serie di treni d’onda di ampiezza proporzionale allo sfasamento. Il conteggio degli impulsi contenuti in essi viene effettuato da un circuito contatore che permette così, in pochi secondi, di ricavare media e sqm di alcune migliaia di misure di sfasamento. Il metodo b. di misura consiste nel rendere digitale il segnale BF sia dell’onda emessa che dell’onda ricevuta. Su ciascuna onda avvengono 16 campionamenti digitali trasformando i segnali che indichiamo come xi e yi in 16 valori numerici per ogni periodo j=1,…,16. TX RX x1 A/D ... x16 16 campioni y1 ... y16 k Fig. 11.5 – Trasformazione analogico-digitale e campionamento. Vengono correlati i valori xi e yi cercando il valore k che rende massima a funzione c = ∑ xi y ( i + k ) 11.18 Questo coefficiente viene calcolato su blocchi di misura di 32 segnali BF e mediato su vari blocchi. Su questo principio di funzionamento si basa il distanziometro Leica Wild Di 2002 che opera con una frequenza fine f1 = 49.95 MHz (λ 1 = 6 m) e con frequenze minori: 1.563 MHz, 48.17 kHz e 24.32 kHz per il calcolo dell’ambiguità. Precisione degli EODM La precisione di tutti gli EODM, a sfasamento, a impulsi ed anche quella degli MDM si valuta in questa forma già vista: σd = ±( c0 + c1 D ) dove c 0 è una costante che varia da 1 a 10 mm e c 1, termine moltiplicativo della distanza, va da 1 a 10 ppm per gli EODM. Ad esempio nel distanziometro DI 2002 le costanti di precisione sono: σ d = ± ( 1mm + 1 ⋅ 10 D ) –6 71 LA MISURA DIRETTA DELLA DISTANZA che corrisponde alla precisione limite dei distanziometri EODM cioè attorno a –6 10 D in quanto, senza particolari accorgimenti per il controllo della rifrazione, la –6 stabilità in frequenza del segnale ricevuto è attorno a 10 . Nel Mekometro KERN –7 ME5000 tale stabilità arriva a 10 grazie ad un circuito risuonatore a microonde nel quale è contenuto un campione d’aria che riproduce le stesse condizioni esterne di misura. Il Mekometro Kern ME5000 Questo strumento trova campo di impiego nella misura delle deformazioni nel controllo degli spostamenti di manufatti e per la misura di grandi distanze (sino a 15 km). –7 Per sfruttare tutta la precisione disponibile ( 10 ) dovuta anche all'utilizzo di un risuonatore a microonde e poter determinare le ambiguità, le frequenze utilizzate sono ben cinque e tutte vicine. La frequenza fondamentale è di 499.51 MHz pari a lunghezze d'onda di 60 cm; come si vede questa frequenza è circa dieci volte maggiore di quella usata per i nor–6 mali distanziometri che raggiungono la precisione massima di 10 . Le costanti strumentali sono: σ d = ± ( 0.2mm + 0.2 ⋅ 10 –6 D ) L’onda portante è infrarossa a laser HeNe; questa luce è polarizzata linearmente, e proprio questa polarizzazione è modulata dalle 5 frequenze. La modulazione avviene grazie al fatto che la radiazione luminosa passa attraverso un cristallo KDP (Potassio, Deuterio, Fosforo) il quale modifica la polarizzazione della luce che lo attraversa in funzione dell'intensità di corrente che lo percorre. Il circuito ricevente misura lo sfasamento di polarizzazione comparando l’onda di ritorno con quella emessa. Il consumo è limitato a 0.3 mW in quanto la trasmissione è «discontinua» avviene cioè ad impulsi di 40 µ s con frequenza di 100 Hz. Il tempo di misura è di circa 2 minuti. Il metodo della misura ad impulsi Il concetto di misura è molto semplice: nota la velocità di propagazione dell’onda elettromagnetica, il tempo ∆ t tra andata e ritorno del segnale verso il prisma è funzione della distanza: v ∆t D = ---------2 11.20 Un metodo così semplice ha tuttavia un problema: occorre, affinché la distanza D –5 abbia precisione minima 10 che sia v che ∆ t siano misurabili con tali precisioni. 8 Nell’ipotesi approssimativa che v = c = 2.9979 ⋅ 10 m/s , costante nota con –5 estrema precisione, si ha che ∆ t deve essere preciso circa 10 , cioè la sensibilità deve essere: 72 LA MISURA DIRETTA DELLA DISTANZA δ ( ∆t ) --------------- = 10 –5 ⇒ δ ( ∆t ) = 10 –5 ∆t ∆t 11.21 Per una distanza minima di misura di 3 m, il segnale ritorna dopo ∆t ≅ 3 ⋅ 2 ⋅ 1 ⁄ 3 ⋅ 10 ; –5 s ≅ 20 ns e la sensibilità 11.21 dovrebbe essere 10 ⋅ 20 ns = 0.2 ps cioè di – 13 2 ⋅ 10 s , ottenibile solo con orologi atomici, al Cesio ad esempio. –5 –6 In realtà, accettando che tale precisione ( 10 o 10 ) sia disponibile per distanze superiori a questa minima distanza, la sensibilità diminuisce. Dalla 11.20 infatti si ricava: –8 2 v δ ( ∆t ) = --- ⋅ 10 –5 δ (D) 11.22 Accettando le costanti del distanziometro (tipiche ad esempio del Wild Di 3000 (DIOR)): δ ( D ) = ± ( 3 mm + 1 ppm ) 11.23 per D = 10 km si ha δ D = ±13 mm e: 1 3 –8 δ ( ∆ t) = ± 0.013 ⋅ 2 ⋅ --- ⋅ 10 s = ± 80 ps = ± 8 ⋅ 10 –11 s mentre per D = 3 m si ha δ D = ± 3 mm e: 1 3 –8 δ ( ∆ t) = ± 0.003 ⋅ 2 ⋅ --- ⋅ 10 s = ± 20 ps = ± 2 ⋅ 10 –11 s Nel distanziometro esiste un oscillatore molto stabile di tolleranza più limitata τ = ± 3 ⋅ 10 –8 s a frequenza f ≅ 14.985 MHz pari a λ = 20 m, ma è possibile in un breve intervallo di tempo valutare intervalli di tempo con precisione superiore a 10 –8 , grazie ad un metodo di interpolazione che si descriverà in breve. Un diodo Ga As viene attraversato per un tempo ristrettissimo: 12 ns, da una forte corrente di 20 - 30 A ed emette un fascio di luce laser. La corrente è costante e stabilizzata in questo brevissimo intervallo. Dopo un certo intervallo di tempo ∆ t al ricevitore arriva il segnale di ritorno: questo intervallo di tempo consente di avere un valore approssimato della distanza con sqm pari a: m 9 τc σ ∆ t = ----- = ± 3 ⋅ 10 –8 s ⋅ 3 ⋅ 10 –8 ---- ≅ ± --- m = 4.5m 2 s 2 Per distanze superiori l’orologio di riferimento determina in modo esatto solo in numero di lunghezze d’onda contenute nell’intervallo di tempo ∆ t tra il segnale emesso e quello ricevuto. Rimane allora il problema della misura «fine» della distanza. Supponiamo che l’oscillatore di riferimento disponga di un’onda di frequenza f0. Chiamando con T il periodo della frequenza fondamentale f, l'intervallo ∆ t tra l’onda impulsiva emessa e quella ricevuta sarà: 73 LA MISURA DIRETTA DELLA DISTANZA ∆t = nT + t a – t b 11.24 Per distanze minori di 10 m il valore di n è uguale a zero. TX ta λ = 20 m T' ( 3 T ) OSCILLATORE DI RIFERIMENTO tb Rx ∆t Fig. 11.6 – Metodo di invio degli «impulsi». Il valore di n è noto in quanto misurando τ , la distanza approssimata è nota con precisione migliore del decametro. Per misurare con precisione ta e tb si usa un convertitore tempo-tensione costituito in pratica da un buon condensatore la cui tensione, misurata in modo digitale, dipende dal tempo di carica in modo lineare. Dopo ogni misura di tensione ed entro un intervallo che al massimo deve durare un ciclo, il condensatore viene scaricato. Questo condensatore viene cioè aperto dal segnale di start e chiuso dalla prima rampa del segnale dell’oscillatore. Per la misura di tb, essendo il segnale ricevuto molto debole, si preferisce fare la misura dopo aver modulato questo segnale con la frequenza data dallo stesso circuito di oscillazione. Un «circuito rivelatore di zero» misura tb come il primo zero della sinusoide smorzata che si ottiene come risultato di detta operazione. Per poter effettuare misure di tempo così precise, non si può prescindere dai ritardi di fase dell’orologio interno dovuti ai ritardi parassiti dell'elettronica, dei circuiti interni o di altri sistematismi qui non più trascurabili: per questo motivo, oltre alla misura «esterna» del tempo, cioè del segnale di ritorno, avviene anche una misura interna, catturando, prima dell’uscita, una parte del segnale impulsivo emesso e misurandone il tempo di percorrenza nei circuiti, cioè a distanza nulla. La misura della distanza avviene tenendo conto dei tempi di avvio di migliaia di impulsi emessi a 2000 Hz di frequenza (o centinaia in modalità tracciamento), e ciò consente di ricavare e fornire anche il numero di misure fatte e lo sqm delle stesse. Uno solo di questi impulsi permette in teoria di determinare la distanza e ciò consente di seguire agevolmente anche oggetti in movimento. Attualmente sul mercato gli strumenti di questo tipo sono ad esempio il DI 3000 DIOR della Leica, l’ELDI 10 della Zeiss ed il modello 101 della Fennel. 74 LA MISURA DIRETTA DELLA DISTANZA I vantaggi di questi strumenti sono una maggior portata a parità di potenza (si possono raggiungere 6 km con un prisma), in genere una maggior precisione e la possibilità per piccole distanze di essere usati senza prismi. Sino a 200-250 m è sufficiente di solito l’energia di ritorno della superficie colpita anche se lo s.q.m. in questi casi decresce a 5±10 mm. Sono molte le applicazioni che possono beneficiare dell’assenza del prisma, anche se grande attenzione va posta nella comprensione di quale particolare dell’oggetto collimato si misura nel segnale di ritorno. La misura risulta più rapida del metodo della fase e la distanza limite ad esempio nel DI 3000 è di 75 km, anche se la portata massima è di 14 km. Essendo in genere la seconda costante di precisione più piccola che nei distanziometri a misura di fase si può dire che gli EODM ad impulsi sono più precisi per lunghe distanze. 11.2 I PRISMI La superficie riflettente dell’onda elettromagnetica è costituita da uno o più prismi; nel caso di strumenti ad impulsi si possono usare anche speciali catarifrangenti o segnali riflettenti od infine nulla se non la superficie stessa dell’oggetto. Il motivo dell’uso dei prismi è semplice: ridirigere la maggior parte del segnale verso l’EDM e ciò avverrebbe solo in piccola parte utilizzando specchi o altri mezzi. Il principio di funzionamento del prisma permette infatti di ridirigere un fascio di luce parallelamente alla direzione di incidenza. Il prisma più semplice si ottiene tagliando uno spigolo di un cubo di cristallo con un piano di taglio normale alla diagonale del cubo. Il numero di prismi necessario ad assicurare una buona risposta dipende dal tipo di distanziometro e dalla distanza da misurare. Fig. 11.7 – Schematizzazione del «riflettore passivo». Se il fascio emesso dallo strumento ha una piccola divergenza (ad esempio 40 mgon che corrispondono ad 80 cm ad 1 km) stabilito che l’energia si disperde con il quadrato della distanza; il numero di prismi necessari N vale: logn N = α + β D + 2 logn ( D ) 11.25 dove α e β sono costanti che dipendono dal tipo di distanziamento. Nella formula 11.11 abbiamo visto l’intervento di due costanti additive d 1 e d 2 che sono dovute: la prima alla non conoscenza della fase dell’onda rispetto al centro strumentale, la seconda alla non conoscenza del punto di riflessione rispetto al 75 LA MISURA DIRETTA DELLA DISTANZA sostegno del prisma o ad una imperfetta conoscenza del ritardo dei circuiti interni. Entrambe le costanti si determinano con precisione attraverso la misura di una serie di basi di taratura che consentono in primo luogo di eliminare eventuali sistematismi di scala nella misura della distanza. Senza entrare nel merito dell’operazione, che prevede la misura di basi di varia lunghezza poste tutte lungo un allineamento, consideriamo solo due basi: D 1 e D 2, e vediamo come con semplici considerazioni se ne determina la somma (d1+d2 ). D1 A d 2 D2 α d1 d1 d1 γ β d2 C d2 Fig. 11.8 – Metodo per la valutazione delle costanti del prisma e del distanziometro. Facciamo l’ipotesi semplificativa che le costanti d 1 e d 2 siano entrambe additive. Poniamo di misurare con lo strumento in B le distanze BA=D 1 e B C = D 2 eseguendo le letture α e β . Poniamoci poi in A e misuriamo AC eseguendo la lettura γ . Si avrà: d1 + d2 + γ = D1 + D2 d1 + d2 + α = D1 d1 + d2 + β = D2 Da queste tre equazioni ricaveremo le due distanze e la somma delle costanti d1 e d2. Sottraendo la somma delle ultime due equazioni dal doppio della prima si ha: 2 ( D 1 + D 2 ) – D 1 – D 2 = 2d 1 + 2d 2 + 2 γ – 2d 1 – 2d 2 – α – β cioè: D 1 + D 2 = 2 γ – ( α + β ) = AC e dalla prima: d1 + d2 = D1 + D2 – γ = γ – ( α + β ) ricavando così la somma delle due costanti. L’influenza della rifrazione atmosferica negli EDM Similmente a quanto visto per la livellazione trigonometrica, il segnale ottico emesso da un distanziometro in A segue, rispetto al percorso teorico minimo, una linea curva, inclinata di un angolo che dipende dal mezzo attraversato e dalla frequenza dell’onda. L’arco l p è dunque il percorso dell’onda ottica che differisce dal più corto percorso della corda l. 76 LA MISURA DIRETTA DELLA DISTANZA Sperimentalmente questa differenza, anche per distanze di 50 km, è inferiore alla precisione strumentale, per cui ai nostri fini l p = l . lp ε l B A Fig. 11.9 – Differenza tra distanza percorsa lp e distanza minima l . In realtà durante il tragitto (l p o l che sia) l’onda subisce un ritardo che dipende dalla velocità di gruppo, cioè dalla frequenza di modulazione, secondo la legge: c nf λ = ------- 11.26 dove c è la velocità della luce nel vuoto, n è l’indice di rifrazione di gruppo e f è la frequenza di modulazione. L’indice di rifrazione dipende in genere: – dalla composizione atmosferica (che si ipotizza costante per modesti dislivelli) – dalla temperatura: ∆ t =1° C fa variare di 1 ppm – dalla pressione: ∆ p =3.4 mb fanno variare di 1 ppm – dall’umidità relativa: ∆ e= 26.6 mbar di pressione del vapore acqueo fanno variare la distanza negli EODM di 1 ppm mentre è circa 100 volte superiore la sua influenza negli MDM. Non potendo conoscere questi valori lungo tutto l’arco s si usano spesso valori medi lungo AB od i valori misurati nella stazione A per correggere la distanza visualizzata, che fa riferimento a temperature, pressioni, umidità standard. Allo scopo, si possono utilizzare apposite tabelle fornite a corredo dei distanziometri oppure ad esempio la formula di Barrel e Sears per gli EODM: p 11.27 ⋅ 10 –6 273.16 n–1 -------------- = ------------------------ ------------------- – ------------------------------ e 273.16 + t 1013.25 273.16 + t n0 – 1 11.27 ove p ed e sono espresse in mb e t in gradi centigradi. 77 12. METODI DI RILEVAMENTO E SCHEMI DI MISURA Col termine «rilievo» si intende la determinazione delle caratteristiche architettoniche, storiche, urbanistiche, logistiche, geometriche di un oggetto o di una porzione di territorio. Col termine rilevamento invece intendiamo solamente la descrizione geometrica e la rappresentazione di un oggetto o di una parte del territorio. Fra gli scopi della Topografia vi è, ricordiamo, la determinazione metrica della forma di un oggetto e la sua rappresentazione; il termine rilevamento è dunque a noi congeniale. Siccome tuttavia ogni discorso qui inserito si riferirà agli scopi del corso di Topografia useremo ugualmente il termine di rilievo, più breve, in quanto non sorgono in questo caso problemi di comprensione del significato. I metodi di rilievo si basano sulla determinazione della posizione di un certo numero di punti dell’oggetto che ne permettano la rappresentazione ed un successivo utilizzo di questa o delle coordinate dei punti, per scopi di progetto e di studio. Occorre dunque: 1. Saper «rilevare» l’oggetto in maniera discreta, misurando cioè di questo, solo quei punti che ne descrivono la forma e le dimensioni in maniera sufficientemente corretta per gli scopi prefissati. Un parametro che influenza il dettaglio di questa discretizzazione sarà la scala della rappresentazione. 2. Determinare la posizione relativa di tutti i punti di interesse del rilievo. È importante conoscere e progettare questo ambito di relatività entro il quale è necessario operare. Se l’oggetto è il terreno, il territorio compreso in una lottizzazione ad esempio, può sembrare sufficiente conoscere la posizione relativa dei lotti per gli scopi di progetto. Per poter inserire correttamente il nuovo rilievo nella cartografia comunale senza scollamenti, è invece necessario che questo ambito di relatività si estenda almeno al rilievo di punti comuni a questa cartografia e alla nuova lottizzazione. A sua volta anche la cartografia comunale può essere rilevata in un sistema di riferimento intrinseco ma quando è necessario inserire detta cartografia all’interno di un contesto regionale, senza scollamenti o soluzioni di continuità è necessario prevedere che «l’ambito di relatività» si estenda ad un territorio per lo meno regionale. Il discorso può via via estendersi a livello nazionale, continentale e globale e mette in evidenza l’utilità, se non la necessità, di disporre sulla zona del rilievo, delle coordi- 78 METODI DI RILEVAMENTO E SCHEMI DI MISURA nate di alcuni punti, anche pochi, note in un sistema di riferimento globale, continentale o nazionale. Questi pochi punti serviranno a trasformare l’insieme numerosissimo dei punti che descrivono il rilievo da un sistema di coordinate locali ad un sistema più generale. Ciò è possibile di solito con la misura o la conoscenza delle coordinate di questi punti in entrambi i sistemi. I punti di cui si conoscono le coordinate in un sistema globale, continentale o nazionale, vengono detti vertici o capisaldi di inquadramento. L’operazione di misura che permette di conoscere nella zona del rilievo le coordinate di alcuni punti in entrambi i sistemi si chiama inquadramento (od inquadramento della rete). 12.1 LA RETE DI INQUADRAMENTO NAZIONALE Fig. 12.1 – Rete trigonometrica prima del 1983. 79 METODI DI RILEVAMENTO E SCHEMI DI MISURA La determinazione delle coordinate di una serie di punti in un sistema di riferimento comune è stata eseguita in Italia dall’Istituto Geografico Militare, in Europa dai vari Enti che hanno costruito il sistema di riferimento EUREF (EUropean REference Frame) ed a livello globale dall’IGS (International GPS Service) che determina le coordinate dei vertici che danno luogo al sistema di riferimento ITRS (International Territorial Reference System). Storicamente si è passati da riferimenti locali a riferimenti sempre più generali grazie alla possibilità di compiere misure sempre più precise e diversificate. Sino al 1930 l’Italia disponeva di vertici di inquadramento ben poco collegati a quelli delle altre nazioni. I vertici di maggior precisione dal punto di vista planimetrico erano detti vertici della rete del primo ordine. Tali vertici, distanti fra loro di circa 30 km furono calcolati principalmente con misure angolari e con poche misure di distanza (dette «basi»). Le misure che collegano questi punti costituiscono un grafo che visivamente somiglia e viene chiamata «rete» e il calcolo delle coordinate viene definito calcolo della rete. A partire dagli anni ‘50 furono disponibili, anche se non furono subito molto diffusi, i primi distanziometri ad onde. Fig. 12.2 – Monografia di un vertice della vecchia rete trigonometrica italiana. Ciò permise di misurare con più facilità e più precisione anche distanze moto lunghe, irrigidire la rete nazionale e collegare con maggior precisione la rete nazionale a quella Europea per poter giungere ad un unico sistema di riferimento. Lo schema di misura a triangoli nei quali si misurano con precisione tutti gli angoli, detto di 80 METODI DI RILEVAMENTO E SCHEMI DI MISURA triangolazione, venne abbandonato a favore di schemi ancora triangolari o quadrangolari nei quali si misurano tra i vertici, angoli e distanze con la stessa precisione (triangolaterazione). Il ricalcolo dei vertici della rete nazionale inquadrata in questo sistema Europeo avvenne solo nel 1983. Per gli avvenimenti che seguirono le coordinate di questa rete non furono mai utilizzate per scopi civili. La figura 12.1 mostra la rete trigonometrica di primo ordine e la figura 12.2 la monografia di un vertice della rete trigonometrica che è disponibile a pagamento assieme alle coordinate. Fig. 12.3 – Rete italiana altimetrica di alta precisione. 81 METODI DI RILEVAMENTO E SCHEMI DI MISURA Allo stesso modo l’IGM costituì su tutto il territorio nazionale una rete altimetrica allo scopo di dotare il territorio, con densità uniforme, di una serie di caposaldi altimetrici attraverso operazioni di livellazione geometrica di precisione. La rete di maggior precisione seguì le principali arterie di comunicazione ed è visibile in figura 12.3. Agli inizi anni ‘90, con il diffondersi delle tecniche di rilievo GPS, l’IGM istituì una nuova rete nazionale, con densità media di un punto ogni 20 km, collegata e nota in un sistema di riferimento europeo (ETRF89) e definita IGM95. Fig. 12.4 – Vertici della rete IGM95. La figura 12.4 mostra la posizione di questi vertici in italia e la figura successiva la monografia di uno dei vertici. Questi vertici sono in piccola parte posizionati su vertici della rete trigonometrica preesistente ed in gran parte in nuovi siti. Tutti i vertici sono ovviamente stazionabili 82 METODI DI RILEVAMENTO E SCHEMI DI MISURA con apparecchiature GPS. Si noti che dei vertici IGM95 sono note le coordinate sia nel sistema di riferimento utilizzato per la vecchia rete trigonometrica (detto ROMA40), sia nel sistema di riferimento Europeo ETRF89 e genericamente denominato WGS84 sulla monografia. Anche se la maggior parte della cartografia esistente è descritta nel sistema di riferimento ROMA40, questo andrà via via sostituito dal nuovo e più preciso riferimento GPS della rete IGM95. Questi vertici hanno infatti coordinate determinate con errore massimo di ±5cm su scala nazionale, precisione ben superiore a quella della rete trigonometrica preesistente. Fig. 12.5 – Monografia di un vertice della rete IGM95. 12.2 RILIEVO DI INQUADRAMENTO, DI INFITTIMENTO, DI DETTAGLIO Il rilievo di inquadramento, come è stato detto, serve ad inserire un rilievo locale (di una porzione di territorio) all’interno di un sistema di riferimento (e spesso anche di un sistema di rappresentazione) comune ad un territorio più vasto. Per fare ciò è sufficiente conoscere le coordinate di pochi punti ben distribuiti in entrambi i sistemi, trovare un modello fisico-matematico ragionevole che leghi questi due sistemi ed infine ricavare i parametri di questo modello con una precisione tale che garantisca l’affidabilità del risultato della trasformazione. Molto spesso il modello fisico-matematico è quello della rototraslazione spaziale con variazione di scala od anche, per la sola planimetria, quello della rototraslazione piana. 83 METODI DI RILEVAMENTO E SCHEMI DI MISURA Per dare maggiore rigidità intrinseca a tutto il rilievo e nello stesso tempo per ridurre i costi ed i tempi di misura, si costruisce attorno alla zona del rilievo una rete di maglia molto grande (che ricopre tutto il territorio) misurata con strumenti di alta precisione e con metodi che consentono di raggiungerla, ma prima ancora di progettarla e di controllarla. Essendo questa la rete di maggiore precisione, sono questi i vertici che si utilizzano di solito per le operazioni di inquadramento: di tutti od alcuni, si determinano cioè le coordinate nei due o più sistemi di riferimento. All’interno della maglia primaria si determinano con misure e collegamenti a distanze inferiori, una serie di vertici di densità più fitta, definiti vertici (o rete) di infittimento. Vista la minor distanza di questi punti fra di loro, lo scarto quadratico medio delle coordinate di questi vertici è simile, non molto superiore a quello dei vertici della maglia primaria, che potremo, per analogia, chiamare ora anche col termine di rete di inquadramento. Lo scopo della maglia secondaria è l’utilità di disporre sul campo, vertici di coordinate note con precisione a distanza non eccessiva da raggiungere: a distanza tale ad esempio che in mezza giornata di misura si possa aprire e chiudere una poligonale di precisione su tali vertici. Il moderno rilievo GPS ha tuttavia rivoluzionato questa concezione legata all’uso di soli teodoliti e distanziometri. La distanza e la posizione dei vertici, specie dei più numerosi vertici di infittimento, non è legata alla intervisibilità, ma semmai alla visibilità ed alla buona ricezione della costellazione satellitare. La rete di maggior dimensione è di solito misurata con osservazioni GPS, quella di infittimento lo è ancora per lo meno in parte; si lascia alle misure tradizionali il completamento della rete di infittimento e il rilievo di dettaglio. Costituite le due reti, le procedure di rilievo si dividono a seconda dei due casi: 1. occorre eseguire un rilievo fotogrammetrico del territorio; 2. occorre eseguire un rilievo topografico tradizionale del territorio. Sovente, specie per il rilievo a grande o grandissima scala dei centri storici (in scala 1:500 ad esempio), sono richieste entrambe le operazioni: il rilievo fotogrammetrico ed il rilievo topografico limitato ai soli cassoni degli isolati. Prendiamo in esame le prime due ipotesi: nel primo caso il rilievo che segue la fase di infittimento consiste nella determinazione delle coordinate dei punti di appoggio dei singoli modelli, o del blocco, per una successiva triangolazione aerea. Spesso gli stessi vertici di infittimento sono «fotografici», cioè collimabili, visibili in almeno due fotogrammi del volo fotogrammetrico. Nel secondo caso, nel caso cioè del rilievo completo a terra, occorre invece determinare le coordinate di ogni punto che descrive, discretizza l’oggetto del rilievo. Per fare ciò anche oggi, il metodo più veloce è misurare le coordinate cilindriche (direzione azimutale, distanza zenitale e distanza inclinata) attraverso una stazione totale. Questa operazione si chiama celerimensura. 84 METODI DI RILEVAMENTO E SCHEMI DI MISURA Fig. 12.6 – Rete di rinquadramento (collegamenti continui) e di infittimento (tratteggiati). La prima richiesta per poter compiere queste misure celerimetriche è la visibilità del punto da rilevare dalla stazione di misura che non può essere sempre un vertice della rete di infittimento. Occorre che fra questi vertici si costruisca allora una ancora più fitta rete di dettaglio il cui schema, per la minor precisione richiesta, è quasi sempre quello della poligonale controllata. Dai vertici di queste poligonali si misurano infine per coordinate cilindriche tutti i punti del rilievo: quest’ultima operazione speditiva (per questo detta celerimensura) per il numero di punti da rilevare costituisce una mole notevole di lavoro. 12.3 STRUMENTI E SCHEMI DI RILIEVO Nelle righe che seguono parleremo dei vari strumenti di misura, ai soli fini della comprensione del dato fornito, che dovremo trattare direttamente od indirettamente. La strumentazione GPS Per la migliore conoscenza del metodo si rimanda al preciso capitolo, qui si parlerà della strumentazione ai soli fini della comprensione degli schemi di rilievo. Il posizionamento GPS di precisione è di tipo differenziale, ciò significa per i nostri scopi che occorre disporre di almeno due ricevitori che contemporaneamente acquisiscano misure. Ciò che ogni ricevitore misura sono «pseudodistanze» ottenute per differenza e/o combinazioni di codice o di fase di onde che idealmente vanno dal centro elettromagnetico dell’antenna del generico satellite ricevuto (centro di fase) e quello 85 METODI DI RILEVAMENTO E SCHEMI DI MISURA dell’antenna del ricevitore. I centri di fase sono noti con precisione rispetto alla meccanica dell’antenna e ciò consente di sostituire con cognizione di causa l’antenna con un prisma o un teodolite sulla stessa basetta avvitata su un comune treppiede. Ciò che i programmi di elaborazione trattano per il posizionamento di precisione sono tutte le doppie differenze di fase indipendenti che sono costruibili. In alternativa, se i dati di un ricevitore fisso su un punto vengono trasmessi ad un secondo ricevitore, quest’ultimo può elaborare in tempo reale i propri dati e quelli trasmessi e ricavare, quasi istantaneamente, le tre componenti del vettore che unisce i due ricevitori e quindi anche le coordinate del secondo ricevitore, posto che il primo abbia coordinate note. Normalmente, specie per misure GPS di precisione, il trattamento dei dati viene tuttavia eseguito dopo lo scarico dei dati di tutti gli strumenti in ufficio. I programmi commerciali forniscono come risultato di questo trattamento le componenti dei vettori (baseline) misurati in modo indipendente tra coppie di stazioni GPS. Queste componenti sono riferite al sistema globale cartesiano geocentrico WGS84 in quanto in questo sistema sono note le coordinate dei satelliti. Se non si collega la rete locale GPS ad una rete di inquadramento (a stazioni permanenti o a vertici della rete IGM95), da questi vettori si ottengono coordinate WGS84 a meno di errori di ±10÷20m dovuti ad una serie di sistematismi che concorrono all’imprecisione del posizionamento assoluto di codice. 2 3 1 4 Fig. 12.7 – I vettori di base (baselines) devono essere connessi ad almeno un vertice di inquadramento. È perciò prassi sempre più comune inquadrare il rilievo locale nella rete nazionale od internazionale. I programmi scientifici forniscono direttamente le tre coordinate di ogni vertice della rete e la relativa matrice di varianza covarianza. Se ad esempio su quattro vertici quattro ricevitori acquisiscono dati (fig. 12.7) i programmi scientifici trattano assieme i dati delle quattro sessioni di misura (programmi multisessione) mentre i programmi commerciali trattano per tre volte i dati di una coppia di sessioni indipendenti (programmi a singola base), nell’esempio i dati di 1 e 2, i dati di 2 e 3 ed i dati di 3 e 4. 86 METODI DI RILEVAMENTO E SCHEMI DI MISURA Ciò che si ricava da questo trattamento semplificato sono i «dislivelli tridimensionali» ∆X ij ∆Y ij ∆Z ij associati alla matrice di varianza covarianza C ∆∆ di dimensione 3×3, per ogni vettore di base. La precisione di queste «basi» è variabile da 1⋅10-5 a 1⋅10-6 per basi corte, sino a 10-7 per lunghe basi e 10-8 per basi di un migliaio di km. Negli ultimi due casi non si ottengono tali risultati con trattamenti standard o con software commerciale e si devono considerare modelli molto fini e complessi. La stabilità delle componenti delle coordinate ricavate non può essere migliore di 10-6 se non si considera ad esempio l’utilizzo di effemeridi precise, del moto del polo e di molti altri fattori, da considerare con cura nel trattamento. Le misure «indirette» che possiamo disporre dopo l’acquisizione GPS sono le componenti delle baseline, con la loro matrice di dispersione in un sistema che, per precisioni non superiori a 10-6 possiamo considerare stabile, geocentrico e definirlo genericamente WGS84. La realizzazione italiana del sistema WGS84 è la rete nazionale IGH95. Per poter trattare queste misure congiuntamente a quelle topografiche classiche dobbiamo considerare che quest’ultime, a differenza delle prime (tranne che per le distanze) fanno riferimento al campo reale della gravità. Queste e quelle assieme sono compensabili in un modello fisico-matematico che tenga conto: – della conoscenza del campo della gravità; – della conoscenza di un buon modello globale e locale della gravità; – con la determinazione di un certo numero di parametri che modellano il passaggio del campo normale al campo reale della gravità; – in un ambito ristretto e per basse precisioni senza nessuna di queste ipotesi. Schemi di reti GPS Potrebbe sembrare senza senso utilizzare in un progetto di una rete GPS uno schema di collegamento dei vertici tipico della triangolazione ed anzi, qualunque schema terrestre potrebbe essere poco ragionevole, in quanto la rete reale di misura collega sia i punti a terra che i satelliti osservati. In realtà i programmi commerciali forniscono come risultato del trattamento differenziale di fase, le componenti di ciascuna base, misurabile in modo indipendente. Sono queste osservazioni elaborate, potremmo chiamarle anche pseudosservazioni, che entrano con la loro matrice di varianza covarianza di dimensione tre in un successivo programma di compensazione. Trascurando le correlazioni tra le componenti, a tutti gli effetti queste misure (vettori di base) sono dei dislivelli a tre dimensioni. Se n ricevitori acquisiscono contemporaneamente, i vettori di base calcolabili in modo indipendente sono n- 1. In una rete di precisione e in reti di inquadramento, si cerca di fare in modo che ogni vertice sia connesso a più di un altro vertice. Ciò consente di ottenere buone precisioni di progetto e buone precisioni finali sulle coordinate. Una regola empirica di progetto di reti GPS fissa il minimo numero di ritorni con il ricevitore su uno 87 METODI DI RILEVAMENTO E SCHEMI DI MISURA stesso vertice; una seconda regola, fissa la ridondanza relativa della rete: rapporto tra numero di misure e numero di coordinate incognite, una terza infine lega la qualità del progetto a valori minimi ed omogenei delle ridondanze locali di ogni misura che si intende compiere. 5 2 3 A 6 1 4 Fig. 12.8 La figura 12.8 mostra uno schema di rete di inquadramento molto rigida, simile ad uno schema classico ed utilizzabile anche per le più precise reti di controllo. Questa rete deve, in ogni caso: – essere collegata (od avere vertici appartenenti) alla rete nazionale IGM95 od alla rete di stazioni permanenti GPS; – contenere al proprio interno tutto il territorio da rilevare. Lo schema di rilievo GPS di infittimento più utilizzato è quello che fa riferimento al rilievo rapido statico «con controllo a terra». Si utilizzano (anche per questioni di produttività) almeno tre ricevitori GPS dei quali due sono posti sui vertici di inquadramento più prossimi ad un terzo (A in fig. 12.8) che riceve per pochi minuti (ad intervalli di campionamento di 5s) nei punti della rete di infittimento. Le coordinate di A sono determinate con ridondanza tre (ridondanza uno per ogni coordinata) grazie alla misura vettoriale dei tre lati del triangolo (3 , 4 , A ). Anche se è spesso più produttivo l’uso di una stazione totale per le operazioni di celerimensura, per particolari scopi si utilizzano a questo fine anche misure GPS. Le tecniche usate in tal caso sono quelle rapido statiche, stop and go o cinematiche con un solo ricevitore base ed il secondo che si muove sui punti di misura. L’unico inconveniente nell’utilizzo del GPS è la scarsa visibilità dei satelliti in alcuni punti di misura o l’assenza di visibilità in altri: ciò significa necessariamente il ritorno sul punto da rilevare con strumenti tradizionali. In zone aperte ai satelliti, la produttività del rilievo GPS cinematico o «stop and go» rispetto a quello tradizionale è oggi paragonabile e in alcuni casi superiore. Lo svantaggio della non visibilità non è completamente assente anche con l’utilizzo congiunto delle costellazioni GLONAS e GPS; il vantaggio rispetto al rilievo tradizionale può essere quello di sincronizzare alle misure, particolari strumenti ausiliari come batimetri, ecoscandagli, misuratori di profili laser ecc. 88 METODI DI RILEVAMENTO E SCHEMI DI MISURA Abbiamo detto che una rete o una misura GPS è sempre di tipo tridimensionale (a rigore dovremmo dire quadrimensionale, essendo importante anche la variabile tempo) e, siccome il passo successivo al rilievo è la rappresentazione, dovremo trovare un sistema e una superficie di riferimento comoda per questo scopo. Siamo abituati a descrivere l’aspetto planimetrico del terreno attraverso una rappresentazione che è la trasformazione cartografica dei punti rilevati proiettati sull’ellissoide di riferimento. A questo scopo si tende oggi a costruire la nuova cartografia facendo uso della rappresentazione di Gauss (secondo le convenzioni UTM) con l’utilizzo dei parametri dell’ellissoide WGS84. Le coordinate geocentriche di una rete GPS inquadrata in questo sistema sono dunque trasformabili in coordinate ellissoidiche (ϕ , λ , h ) e successivamente in coordinate cartografiche (N, E) per quanto concerne la planimetria. Altimetricamente ciò che serve per scopi di progetto è una quota ortometrica H: occorre conoscere se un canale o una conduttura può percorrere (con o senza sollevamenti o pompe a pressione) un certo percorso, occorre conoscere il lavoro compiuto da un treno su una ferrovia o da un camion su un’autostrada ecc. Per questi scopi è necessario trasformare le altezze ellissoidiche attraverso la nota relazione: H = h–N Occorre allora conoscere l’ondulazione del geoide N in tutti i punti del rilievo. Nell’ambito di «relatività» più o meno ampia del rilievo e, stabilito che su alcuni punti della rete (capisaldi) si disponga di entrambe le quote H e h (ciò avviene per molti vertici della rete IGM95), ciò che importa è la precisione relativa con cui si possono misurare i vari dislivelli: ∆H = ∆h – ∆N Ritorneremo su questo argomento quando parleremo di reti altimetriche, tuttavia è chiaro che se ∆ h o se la variazione di ondulazione del geoide ∆ N sono note con bassa precisione anche ∆ H risulta poco precisa. È chiaro anche che tale precisione va valutata in relazione agli scopi del rilievo: una cartografia tecnica, un progetto di un acquedotto, di una strada ecc. Per questi motivi quando precisione altimetrica e precisione planimetrica non sono raggiungibili solo con misure GPS si preferisce allora scindere il problema altimetrico da quello planimetrico, come già si faceva tradizionalmente per altri motivi. È chiaro tuttavia che questa dicotomia va ogni giorno sempre più restringendosi, coinvolgendo cioè applicazioni più ristrette e con esigenze di precisione specifica: per scopi cartografici è sempre più esteso l’utilizzo del GPS e della conoscenza del geoide anche per la rappresentazione altimetrica. In caso contrario le misure GPS sono utilizzate solo per la costruzione del rilievo planimetrico ricavando l’altimetria per mezzo della misura di reti di livellazione geometrica. 89 METODI DI RILEVAMENTO E SCHEMI DI MISURA Teodoliti EODM, Stazioni totali Ci domandiamo ora cosa misurano questi strumenti e con quale precisione. Parleremo degli schemi di misura che fanno riferimento a questi strumenti e come si integrano queste misure con quelle GPS. Un teodolite è un misuratore di direzioni (angoli) azimutali e di distanze zenitali. Per come sono state definite, entrambe fanno riferimento al campo reale della gravità: quando lo strumento è rettificato ed in stazione, l’asse primario è diretto come il versore n. n n' P Campo: W=Wp Ellissoide locale Geoide: W=W0 Fig. 12.9 La direzione di n differisce da n ’ (diretta al campo normale) di un angolo ε n detto deviazione della verticale. Sia le misure azimutali che zenitali che teoricamente dovrebbero fare riferimento al campo normale, sono influenzate da questo «errore» che assume la stessa forma dell’errore di verticalità che per le misure azimutali vale: e ϑ = ε n tgα cosϑ dove ϑ e α rappresentano una direzione azimutale a priori ignota e l’angolo di elevazione (complemento a 100 gon alla distanza zenitale). Ciò che rimane da chiarire sono due aspetti: 1. Se si vuole rappresentare planimetricamente il territorio da rilevarsi attorno al punto P e se la superficie di riferimento è un ellissoide locale, ciò che è importante non è considerare la deviazione della verticale rispetto al campo normale, bensì la deviazione della verticale ε l rispetto ad un ellissoide orientato localmente la cui normale è n”: questi valori ε l sono in genere più ridotti e di segno alterno su tutto il territorio nazionale in cui vige questa localizzazione. 2. La deviazione ε l non cambia in media in un ristretto ambito territoriale, proiettando i punti lungo n o lungo n’’ ciò che si ottiene, a parte una traslazione è del tutto identico. Con queste ipotesi ∆ Φ = ∆ ϕ ; ∆ Λ = ∆ λ . In questo ambito possiamo non preoccuparci eccessivamente delle deviazioni dalla verticale. Altro ragionamento invece deve essere fatto se si vogliono trattare e compensare reti miste: GPS e tradizionali, o se si vogliono inquadrare queste nei sistemi di riferimento di quelle o viceversa. 90 METODI DI RILEVAMENTO E SCHEMI DI MISURA Per reti di precisione, topografiche tradizionali o miste (GPS + tradizionali), è possibile inserire, fra le incognite in compensazione, per ogni stazione, le due componenti ( ξ, η ) del vettore ε deviazione dalla verticale. Alternativamente è possibile inserire, come valori noti, le deviazioni della verticale quando queste si conoscano ad esempio attraverso un buon modello di geoide locale. Per la compensazione di reti miste tridimensionali o per l’inquadramento di reti GPS o topografiche in un unico sistema, è possibile considerare che, in un’area limitata (anche di alcune decine di km) possiamo inserire fra i parametri incogniti sette parametri di rototraslazione spaziale con variazione di scala che modellano il passaggio fra i due sistemi. Queste incognite aggiuntive permettono sia di sfruttare tridimensionalmente tutte le misure acquisite che di inquadrare entrambe le reti in un sistema di riferimento nazionale od internazionale. Di per sé le reti statiche GPS, specie se eseguite con particolari accorgimenti che ne migliorano la precisione altimetrica, sono più precise (10-6- 10-7) che quelle tradizionali (10-5- 10-6) quindi in una compensazione mista occorre pesare opportunamente ogni osservazione o «pseudosservazione». Nuove tecniche di misura GPS (Stop and go, rapido statica, RTK) hanno formalmente precisioni minori, avvantaggiando tuttavia la produttività del rilievo. Fig. 12.10 – Moderni schemi di collegamento con strumenti tradizionali. Gli schemi di rilievo con strumenti tradizionali utilizzati per reti di inquadramento prevedono il collegamento dei vertici con schemi a triangolo o a quadrilatero. In questi schemi si misurano sia direzioni angolari che distanze. (fig. 12.10). Durante il progetto della rete è opportuno prevedere la misura di ogni possibile quantità topografica rilevabile; la fase di simulazione ai minimi quadrati servirà a verificare se è possibile raggiungere la precisione richiesta o se tale precisione (normalmente il più uniforme possibile su tutti i vertici della rete) è raggiungibile anche con uno sforzo inferiore. Togliendo fra le misure progettate quelle con minor ridondanza locale, o quelle che per motivi logistici non sono facilmente eseguibili, si verificano di volta in volta questi obiettivi. Altimetricamente lo schema di collegamento e di calcolo è quello della livellazione trigonometrica, che deve tener in debita attenzione l’influenza della rifrazione. 91 METODI DI RILEVAMENTO E SCHEMI DI MISURA In caso questa non garantisse precisioni adeguate si può spezzare il dislivello ed il percorso tra due vertici in due o più tratte di livellazione trigonometrica od eseguire misure (reti) di livellazione geometrica. Gli schemi classici seguiti per reti di infittimento sono quelli delle intersezioni dirette (in avanti) od inverse (all’indietro). 2 P 3 1 γ α β P Fig. 12.11 – a. intersezione all’indietro; b. intersezione in avanti. Nelle intersezioni inverse si prevede la misura da un punto P di direzioni angolari e distanze verso vertici di coordinate note. Nel caso di intersezione in avanti si prevede la misura da punti di una rete di coordinate note, di direzioni angolari e/o distanze verso un punto P di coordinate incognite. Questi schemi di intersezioni dirette od inverse sono seguiti anche senza avere come scopo il calcolo delle coordinate di un punto P, per quanto ora diremo. 1 α D γ C A E E β 2 3 Fig. 12.12 – Collegamento a vertici di coordinate note. In uno schema di rilievo poligonale, che di per sé è poco rigido, la collimazione da alcuni vertici della poligonale a punti di coordinate note ha il doppio scopo di irrigidire la poligonale e di inquadrarla nel sistema di riferimento dei punti di coordinate note (fig. 12.12). 92 METODI DI RILEVAMENTO E SCHEMI DI MISURA 7 6 5 1 P 2 3 4 Fig. 12.13 – Collegamento ai soli scopi di irrigidire la rete. In figura 12.13 si mostra il caso in cui da tre vertici di una poligonale chiusa si collima un punto P con misure angolari e/o distanze. Il punto può essere ad esempio un particolare di un edificio, di una torre, di un traliccio di coordinate non note ma la misura congiunta da più vertici della rete rende questa più rigida. Misure con nastri, misure di allineamento, misure con squadri I fili e i nastri d’acciaio sino all’avvento dei distanziometri, che dal punto di vista operativo è avvenuto attorno al 1950, sono stati gli strumenti più precisi per la misura diretta di una distanza. Se si adottano particolari attenzioni alla misura, questa può ottenersi con sqm di ±1÷2cm per km per i nastri e di ±1mm per km utilizzando l’apparecchio «Jäderin». I nastri hanno suddivisione minima di un millimetro e lunghezza di 10 m, 20 m, 50 m e 100 m. Una distanza superiore alla lunghezza del nastro si misura con un certo numero di riporti detti «alzate». È necessario, per misure di precisione, che il nastro sia «certificato» cioè sia stato tarato con precisione dalla casa costruttrice e che questa fornisca la costante di dilatazione dell’acciaio, normalmente acciaio invar1 e la forza dinamometrica da applicare agli estremi per la misura. Perché questo avvenga correttamente è necessario che il nastro non si deformi eccessivamente secondo una catenaria, per questo si appoggia su rulli portati alla stessa quota che permettono il sostegno e lo scorrimento del nastro. La misura avviene a tensione dinamometrica stabilita dal costruttore; durante la misura occorre determinare la temperatura del nastro in più punti per tener conto delle variazioni termiche. Nel caso di utilizzo per misure di deformazione di strutture, in particolare di solette orizzontali, con questi accorgimenti e con l’uso di un nonio per entrambi gli estremi, si riesce a valutare distanze dell’ordine di 20 m con sqm di ±0.1÷0.2mm. In questo caso il nastro è appoggiato alla soletta orizzontale ed assume quindi la 1 L’acciaio normale ha un coefficiente di dilatazione di 10-5 °C, l’acciaio invar, costituito da una lega di 63% di nichel e 36% di ferro, ha coefficiente di 10-6 ed esistono leghe speciali con coefficienti ancora minori. Ciò significa che un errore nella valutazione delle temperature del nastro di 1° si traduce in un errore di misura di una parte per milione per acciai invar. 93 METODI DI RILEVAMENTO E SCHEMI DI MISURA forma e temperatura di questa. Nei punti rispetto ai quali è necessario valutare le distanze devono essere materializzati opportuni capisaldi che consentano l’inserimento di precisione di questi nonii di lettura. Per misure di alta precisione, per la misura di basi per reti di triangolazione (prima dell’avvento degli EODM) o per la taratura degli EODM, prima dell’avvento del GPS si utilizzava l’apparato di «Jäderin». Questo è costituito da un filo di invar di 24m di lunghezza, graduato solo all’estremità, sospeso dal suolo e teso da due pesi di 10kg ciascuno per mezzo di due carrucole. Sull’allineamento da misurare, ad una distanza molto vicina a quella del campione, si dispongono dei segnali che, attraverso un nonio, permettono di misurare la posizione delle due scale al dmm. In fase di taratura del filo è stata determinata una volta per tutte la lunghezza della corda della catenaria del filo, teso con i due carichi standard. Gli allineamenti Non è immediato comprendere che il porre un punto in allineamento con altri due costituisce un’operazione di misura. B C A Fig. 12.14 – La posizione di C lungo AB è una operazione di misura. Non si scrive sul libretto di campagna nessuna misura ed alcune volte non si usa almeno uno strumento per posizionare il punto C (fig. 12.14) lungo la visuale che il nostro occhio osserva traguardando A e B. Eppure il punto C, posizionato in questo modo, ha coordinate che devono appartenere alla retta passante per A e B. Certo la precisione di queste misure va valutata in funzione dello sqm con cui C è posizionato lungo AB. Se su A e B si usano due paline rese verticali con filo a piombo e poste al massimo a poche centinaia di metri fra loro, si riuscirà ad allineare una terza palina C con sqm dell’ordine di pochi cm nelle migliori condizioni e per brevi distanze (80-100m). 94 METODI DI RILEVAMENTO E SCHEMI DI MISURA Ciò è già un successo per l’economicità degli «strumenti» utilizzati. è possibile porre in A un teodolite e coprire così distanze più elevate, raggiungendo precisioni che dipendono dagli strumenti usati in B e C e sugli altri allineamenti, dalla precisa collimazione dei traguardi, ma non dipendono dalla precisione angolare del teodolite. Nel caso di utilizzo di collimatori e di appositi segnali di precisione è possibile utilizzare queste misure anche per valutare deformazioni di dighe o di grossi manufatti. I collimatori sono costituiti da un cannocchiale di grandi dimensioni ed elevati ingrandimenti (es. 60 ingrandimenti) che può ruotare di piccoli angoli solo in senso zenitale. Per il suo peso e l’elevata precisione viene posto su pilastrini di cemento armato; posizionato a centramento forzato, è utilizzato appunto nelle misure delle deformazioni delle dighe. Con misure di allineamento e di distanza lungo allineamenti, sono state rilevate quasi tutte le mappe di impianto del Catasto Italiano. A C B Fig. 12.15 – Esempio d i rete celerimetrica di allineamenti. I punti A, B, C sono di coordinate note. A partire da una rete di infittimento di coordinate note, i punti di dettaglio sono stati rilevati come nell’esempio di figura 12.15. Nella stessa figura i punti di dettaglio sono indicati con un cerchietto; si fa l’ipotesi di aver misurato tutte le distanze che in figura indicano il collegamento tra i punti. Nell’esempio sono incognite le coordinate di nove punti in planimetria (18 incognite) e si hanno 15 misure di distanze lungo allineamenti più 9 «misure» di condizioni di allineamento. Le figure 12.16 e 12.17 riportano gli esempi reali di rilievo catastale. Le unità di misura sono le «canne triplometriche», di 3 m appunto. La misura 15.200 indica una distanza di 15 ⋅ 3 m + 200 cm = 47.00 m. La ridondanza globale della rete è 6. 95 METODI DI RILEVAMENTO E SCHEMI DI MISURA 1 4,3 17 p ,00 75 10 5, ,00 75 1 0,0 10 9, 29 0 59.4 m 0,00 d 0 75,0 7 0,00 71,2 153, 08 g 72 4 ,9 00 0, 52 219, 123,42 c 203, 90 ,6 0 13 7, 39 00 b 31 0,0 0 4 ,9 o 33 0 0, 0,0 11 6, 10 72 a 0,00 4 218,19 0,00 00 0, 3 ,48 4 22 h 2 Fig. 12.16 – Rete di allineamenti. Esempio tratto «in bella» da misure reali. Fig. 12.17 – Rilievo per allineamenti puri: stralcio da abbozzi di rilievo catastali. 96 METODI DI RILEVAMENTO E SCHEMI DI MISURA Misure con squadri Quando non occorre una elevata precisione, l’individuazione della direzione normale ad un allineamento e passante per un punto P, viene eseguita attraverso uno squadro. Ciò può essere sufficiente nel caso di rilievo di un confine irregolare che mediamente segue una direzione. B H' G H G' F' F E' E D' C D A Fig. 12.18 – Rilievo con squadri. In figura 12.18 il confine, rappresentato dalla spezzata CDEFGH segue in media la direzione AB. Le distanze dei vertici della spezzata dall’allineamento sono di qualche metro o pochissime decine di metri e in ogni caso di lunghezza inferiore alla metà della distanza AB. Lo squadro a prisma più usato è quello di Wollaston, costituito da due prismi ricavati dalla quarta parte di un ottagono regolare i cui angoli sono esattamente di 135°. Traguardando nella direzione E ’B (fig. 12.18) è possibile osservare la direzione della normale ad AB nel punto D, spostandosi in D ’. Sovrapponendo due di questi prismi è possibile sfruttare lo strumento all’interno di un allineamento: Traguardando in O ci si sposta sino ad osservare i punti A e B sovrapposti. In questo caso ci si trova all’interno dell’allineamento AB ed è ora possibile allineare un terzo punto (una palina) nella direzione OO ’ verso un terzo punto D. Quando i tre oggetti A, B, D appaiono allineati, AB è normale a DD ’. 97 METODI DI RILEVAMENTO E SCHEMI DI MISURA O' A B 13 5° O Fig. 12.19 – Croce di squadri. La precisione con cui si realizza questa operazione è dell’ordine di 5÷8cm su 20m di distanza. Dei punti celerimetrici rilevati in questo modo sono misurate così le ascisse e le ordinate rispetto ad un asse x costituito dall’allineamento stesso AB. Per determinare con miglior precisione direzioni normali ad un allineamento od inclinate di un valore prefissato è ovviamente possibile utilizzare il teodolite. Ciò avviene ad esempio per il picchettamento di grandi opere di ingegneria civile: grandi insediamenti industriali, dighe, ponti, acquedotti ecc. Per «picchettamento» si intende il posizionamento nel terreno, la materializzazione (di solito con picchetti) di una serie di punti significativi dell’opera di cui sono note le coordinate di progetto in un particolare sistema di riferimento. Gli schemi di inquadramento ed infittimento altimetrico La rete di inquadramento altimetrico di un territorio può essere costituita dalla stessa rete utilizzata per la planimetria, e compensata tridimensionalmente. In tal caso deve essere previsto l’uso di strumenti tradizionali e la misura di distanze zenitali e/o l’uso di strumenti GPS congiunti alla conoscenza del geoide. Più sovente, avendo separato il problema altimetrico da quello planimetrico, si tratta di compensare separatamente una rete di livellazione geometrica ed una rete di livellazione trigonometrica. I capitolati per la costruzione di cartografia a grande scala (1:2000- 1:1000) prevedono di solito di non utilizzare quest’ultimo tipo di livellazione che, per la minor precisione, è accettata solitamente per l’appoggio di cartografia a media scala (1:5000- 1:10000). In ogni caso gli schemi ed i capitolati richiedono una buona ridondanza globale ed una distribuzione uniforme della ridondanza locale. La ridondanza deve essere assicurata intrinsecamente nella rete, vale a dire non deve dipendere dai capisaldi di inquadramento collegati. Una volta ricavate le quote della rete rispetto ad uno zero prefissato ad arbitrio, la rete sarà traslata rigidamente sui capisaldi adottando un semplice criterio di media o, se si ritiene che i capisaldi abbiano quote di precisione diversa, utilizzando una media pesata. 98 METODI DI RILEVAMENTO E SCHEMI DI MISURA Al minimo, la rete dovrebbe essere collegata a due capisaldi di quote note. Ciò significa tuttavia affidabilità molto scarsa delle quote. In caso di errori dovuti ad esempio alla non corretta identificazione dei capisaldi, non vi sarebbe alcuna possibilità di controllo della quota dell’uno o dell’altro. Ciò fa sì che i capisaldi di inquadramento altimetrico siano per lo meno tre. Comunque tali capisaldi devono essere ben distribuiti nel territorio da rilevare. Nel caso di reti di livellazione geometrica le linee di livellazione devono essere misurate di andata e ritorno; il peso da dare in compensazione è inversamente proporzionale alla lunghezza della linea. Per dislivelli trigonometrici si cerca di non superare le misure dirette con battute superiori a 8-10km. A parte i problemi di visibilità, anche per tali distanze, per distanze superiori, a causa della rifrazione, si deve spezzare la misura in più battute. Sino ad una decina di km il peso da assegnare alla misura è inversamente proporzionale al quadrato della distanza. 12.4 I PROGRAMMI DI PROGETTO E COMPENSAZIONE DI RETI GEODETICHE Anche se a rigore occorre parlare prima di progetto di una rete e poi di compensazione, invertiremo invece l’ordine, per capire meglio quali ipotesi si fanno sulle misure di provenienza prima ancora di proporre consequenzialmente «l’ambiente di lavoro» (campo geodetico o topografico ad es.) nel quale vengono trattate. Immaginiamo di dover ricavare le coordinate tridimensionali di una rete per la quale si sono seguite diverse tecniche di misura: – misura GPS per alcuni punti fra i più distanti; – misure di distanza con EODM; – misure di direzioni azimutali e direzioni zenitali; – dislivelli trigonometrici e geometrici. Facciamo l’ipotesi semplificativa che il campo gravimetrico sia normale, cioè che ovunque la deviazione dalla verticale (ξ ,η ) sia nulla: in questo caso la normale all’ellissoide di riferimento e la normale al geoide coincidono e le due superfici sono parallele. La geometria di riferimento dovrebbe essere allora quella della superficie ellissoidica. È possibile scrivere le equazioni delle misure topografiche in questo riferimento; queste equazioni sono abbastanza complesse, tuttavia esistono programmi di progetto e compensazione di reti che fanno ciò in modo rigoroso. In questo caso tuttavia dovremo fare una ulteriore ipotesi semplificativa: l’ellissoide di riferimento del campo normale o meglio, l’ellissoide che meglio si adatta ad un campo reale medio della zona di rilievo con strumenti tradizionali e l’ellissoide di riferimento delle misure GPS, sono coincidenti. Questa ipotesi è alquanto approssimativa e può essere rimossa; ammettendo che fra l’ellissoide che meglio si adatta (all’approssimazione di campo normale nullo) alle misure topografiche e l’ellissoide implicito nei risultati delle misure GPS esiste un cambiamento di sistema di riferimento, i parametri di trasformazione fra i due sistemi, possono anch’essi essere inclusi fra i parametri incogniti durante la compensazione della rete. 99 METODI DI RILEVAMENTO E SCHEMI DI MISURA Un secondo modo di trattare tridimensionalmente le misure topografiche tradizionali è quello di «portarle» o se si vuole usare un termine improprio, di «correggerle» per portarsi in un sistema di riferimento cartesiano ortogonale locale (la terna di Eulero). Devono essere modificate le direzioni azimutali, le distanze zenitali, i dislivelli, non devono essere modificate nel senso di «deformare» le distanze inclinate, in quanto invarianti per cambio di sistema di riferimento; le componenti delle basi GPS devono essere solo ruotate (e propagate le matrici di varianza covarianza di queste nel nuovo sistema). Per ricavare queste deformazioni occorre conoscere le coordinate approssimate (ϕ ,λ ,h) di ogni vertice della rete; questa ipotesi è ragionevole in quanto un’approssimazione di qualche decametro a questi fini è più che sufficiente: è già necessaria una maggior approssimazione di (qualche metro), d’altra parte, per l’inizio del ciclo iterativo nella compensazione ai minimi quadrati. Anche in questo caso dobbiamo ammettere che tra le misure GPS e le misure tradizionali sia incognito un cambio di sistema di riferimento (a sei o a sette parametri) perciò è necessario che su o fra almeno tre punti della rete siano state eseguite misure GPS e misure tradizionali. Nel caso in cui si sia misurata un’unica base GPS all’interno della rete, questa può essere utilizzata ad esempio in modo scalare cioè come distanza inclinata. Una sola misura di questo tipo, anche se apparentemente inutile, può ugualmente irrigidire una rete molto estesa, riducendo notevolmente la propagazione degli errori, specie in schemi simili a quelli a poligonale. La separazione della planimetria dall’altimetria Una scelta nel progetto e nella compensazione di reti è quella di separare le tre incognite di posizione in due coordinate planimetriche ed una altimetrica ed ipotizzare, o meglio far finta, che fra queste, non esista alcuna correlazione. Ciò avviene proiettando le misure su una comoda superficie di riferimento planimetrica (il piano o la carta di Gauss). Per fare ciò occorre conoscere le coordinate dei punti, le quote in particolare, solo in maniera approssimata. Dopo questa operazione verranno compensate soltanto queste «proiezioni» planimetriche. Viceversa le stesse misure sono utilizzate per «proiettarle» in un sistema di riferimento altimetrico secondo un modello più o meno raffinato. Per fare ciò le informazioni planimetriche (ad esempio la posizione dei punti in una livellazione trigonometrica) sono poco influenti nella determinazione di questi dislivelli. Anche le misure GPS possono essere trattate in questo modo, anziché in maniera puramente tridimensionale; il diverso sistema di riferimento, per reti di piccola estensione (max 10 km) incide poco sulla proiezione planimetrica delle baselines su uno o l’altro riferimento. Premettiamo che le reti GPS sono di precisione superiore alle reti topografiche tradizionali e quindi se la rete GPS è molto rigida, normalmente non ha senso compensarla assieme alle misure topografiche tradizionali. Non si afferma che non ha senso costruire reti con misure di diverso tipo, tutt’altro, ma solo che, se lo scopo di tutte le misure è quello di ottenere una rete con precisione media 10-6, e ciò si è ottenuto con una serie di misure GPS, le misure topo- 100 METODI DI RILEVAMENTO E SCHEMI DI MISURA grafiche, che ipotizziamo di precisione media 10-5 non hanno modo di modificare od interagire se non in piccolissima parte con le misure GPS. Viceversa saranno le misure tradizionali ad essere maggiormente corrette e compensate per adattarsi al meglio alle misure GPS. Ha senso pratico prevedere la costruzione di reti «miste» (GPS e tradizionali) nel caso ad esempio di reti utilizzate per il tracciamento di gallerie o di opere in cui non è sempre possibile utilizzare le misure satellitari, o semplicemente per costruire una rete di infittimento necessaria in zone non stazionabili con GPS (urbanizzato denso, metropolitane ecc.). Reti planimetriche: carta di Gauss o piano topografico In un intorno, ristretto grossomodo al campo topografico (ad esempio ± 5km attorno ad un vertice baricentrico della rete), questa può essere compensata planimetricamente su questo piano. Ciò significa che le distanze inclinate, possono essere ridotte semplicemente all’orizzontale, gli angoli e le direzioni azimutali misurati possono essere introdotti tali e quali in compensazione. Questo modo di lavorare, anche se solo in planimetria, ha errori di modello sempre maggiori via via che le distanze raggiungono i 10- 15 km dal baricentro della rete e, più in là, non può essere considerato corretto con gli strumenti oggi a nostra disposizione. Per ciò che riguarda le distanze inclinate, la riduzione al piano può essere eseguita proiettandole su un piano medio normale ad un versore n, direzione media dello zenit nella zona del rilievo. Per gli angoli, le direzioni azimutali e le distanze zenitali si osserva che dipendono dalla direzione locale dello zenit nella zona del rilievo. Per reti sino a 15 km, si usa correggere queste misure in funzione della posizione approssimata dei vertici della rete, rispetto ad un punto baricentrico, tenendo conto di un campo gravitazionale di tipo sferico. Queste correzioni possono tener conto della conoscenza locale delle componenti della deviazione della verticale, ma non sono causate solo dal cambiamento del versore n su ogni vertice di rete: servono anche a «portare» figure geometriche sull’ellissoide (sfera locale) alla geometria piana. Sull’ellissoide, ad esempio, la somma degli angoli interni di un triangolo è sempre maggiore dell’angolo piatto, mentre, nel caso piano, gli angoli «corretti», debbono soddisfare alla geometria euclidea. Queste correzioni, meglio dire deformazioni, si apportano alle misure realmente eseguite, e permettono nell’intorno limitato descritto, di compensare reti bi- o tridimensionali nel piano o nel sistema cartesiano locale. Una seconda scelta consiste nel «proiettare» tutte le misure nel piano della carta di Gauss. Questo tipo di proiezione si intende eseguita nell’ipotesi semplificativa che: a. il campo anomalo sia nullo, o comunque costante all’interno del rilievo (T=cost), cioè siano nulle e costanti deviazioni della verticale ed ondulazioni del geoide. b. Un’altra ipotesi, non solo geometrica, è che si conosca l’ellissoide di proiezione rispetto al quale è più ragionevole o comodo porre N=costante nota a priori. 101 METODI DI RILEVAMENTO E SCHEMI DI MISURA In primo luogo occorre riportare le distanze alla carta di Gauss, passando attraverso la superficie ellissoidica o alla sfera locale per distanze minori di 80-100 km. Ciò vuol dire conoscere, almeno grossomodo, le quote dei punti di misura, ed operare in uno dei tre modi di riduzione già visti al capitolo 10. Per reti più estese di 80 km, se le basi sono invece minori di questa dimensione, è sufficiente ridurre ciascuna base con parametri dipendenti dalla posizione media approssimata dei due punti coinvolti. (Ciò può avvenire ad esempio volendo sfruttare solo in planimetria basi GPS). In tal caso, anche per le distanze, occorre verificare che sia trascurabile la correzione lineare alla corda. Per misure angolari, siccome è nota la proprietà di conformità della carta di Gauss, è sufficiente correggere tutte le misure per passare dai valori misurati sulla tangente alla trasformata della geodetica ai valori misurati sulla corda. Senza correggere gli angoli, avendo a disposizione la direzione approssimata del Nord rispetto allo zero strumentale, si può correggere ogni lettura angolare della somma della convergenza delle trasformate dei meridiani γ e dell’angolo alla corda ε . Dopo queste riduzioni, è possibile compensare la rete planimetrica sulla carta di Gauss. Teoricamente potrebbe essere compensata la rete anche di un’intera nazione; in pratica, mano a mano che estendiamo la zona, è più difficile sostenere che ivi il campo anomalo sia costante. La conoscenza della deviazione della verticale in alcuni punti della rete, come pure la misura di azimut astronomici e quella dell’ondulazione del geoide, è necessaria per ridurre la propagazione di questi errori, nel caso in cui veramente il territorio oggetto del rilievo abbia estensione di centinaia di km. Reti: equazioni generatrici e compensazione minimi quadrati Le misure che prendiamo in considerazione nel trattamento delle reti planimetriche sono le distanze (già ridotte alla superficie di riferimento usata), le direzioni angolari, gli azimut, gli angoli, gli allineamenti, le direzioni normali. Nel caso di reti altimetriche prenderemo in considerazione i soli dislivelli ortometrici mentre, per reti tridimensionali, considereremo tutte quelle elencate in precedenza, le distanze zenitali ed i vettori di base GPS. Lo strumento che useremo allo scopo sarà il metodo statistico di compensazione ai minimi quadrati; il metodo permette di progettare prima e di trattare poi la rete e queste misure. Tranne casi particolari le equazioni generatrici in Topografia, saranno sempre non lineari nei parametri: coinvolgeranno cioè da un lato, linearmente, le misure eseguite e, dall’altro lato dell’equazione, funzioni non lineari dei parametri, che quasi sempre sono le coordinate dei vertici della rete o le correzioni di orientamento angolare. La non linearità obbliga all’introduzione di valori approssimati dei parametri incogniti, attorno ai quali si linearizzano le equazioni generatrici. Ricordiamo anche qui che il numero di equazioni deve in genere superare di una buona percentuale il numero delle incognite; ciò si può valutare attraverso un parametro, detto ridondanza relativa, che vale: r%=m/n 12.1 102 METODI DI RILEVAMENTO E SCHEMI DI MISURA dove m è il numero di equazioni (misure) ed n il numero di parametri incogniti. È necessario poi che ogni vertice in cui sono incognite una, due o più coordinate, sia collegato ai rimanenti almeno da due, tre o più misure indipendenti. In termini più rigorosi questa condizione si esprime: è necessario che nessuna misura abbia ridondanza locale uguale a zero. Prima di progettare o compensare una rete, occorre stabilire, fissare il sistema di riferimento: di ciò parleremo più avanti in un apposito paragrafo. La soluzione e una gran parte dei risultati sarà tuttavia dipendente dal sistema di riferimento scelto. Ci fermiamo ora solo sui valori in ingresso ed in uscita in un progetto o in una compensazione di una rete. Compensazione e progetto: valori in ingresso ed uscita In fase di compensazione di una rete si introducono: 1. le misure da compensare ed il loro sqm; 2. eventuali misure da rispettare rigidamente; 3. le correzioni di orientamento approssimate delle direzioni angolari sui vertici di stazione; 4. le coordinate approssimate dei punti incogniti; 5. le coordinate ed eventualmente il loro sqm per i punti da considerare noti; 6. la stima iniziale del σ 0. In uscita avremo almeno: 7. il valore σ̂ 0 finale; 8. le misure compensate e la loro precisione; 9. gli scarti e la loro precisione; 10.le ridondanze locali per ogni misura; 11.i parametri incogniti (coordinate, correzioni d’orientamento) con gli sqm ed i parametri delle ellissi od ellissoidi di errore per i vertici della rete, ed eventualmente le ellissi relative ad una coppia di vertici della rete. In fase di progetto di una rete (si dice anche in simulazione), si introducono i valori di cui ai punti 4, 5, e 6 mentre per i primi tre punti si introducono solo le informazioni di quali misure si intenderanno eseguire ed il loro sqm, quali misure si intenderanno rispettare rigorosamente e quali correzioni di orientamento si misureranno. In uscita otterremo il valore σ̂ 0 finale, identico a σ 0 iniziale previsto, la precisione delle misure compensabili, o meglio lo scarto quadratico medio degli scarti, e le ridondanze locali. Non si otterranno ovviamente i parametri incogniti, ma si otterrà la stima della matrice di varianza covarianza di questi parametri e, di conseguenza, le ellissi o gli ellissoidi di errore per i vertici della rete, ed eventualmente le ellissi relative ad una coppia di vertici della rete. 103 METODI DI RILEVAMENTO E SCHEMI DI MISURA Reti: il sistema di riferimento (datum) Prima di progettare o compensare una rete occorre aver stabilito un sistema di riferimento (datum). Se dovessimo trovare una definizione abbastanza generale di datum, potremmo dire: «tutto ciò a cui l’insieme delle misure è invariante nello spazio dei parametri». Nel caso di una rete planimetrica formata da sole distanze, comprendiamo che queste rimangono invarianti per una rotazione od una traslazione dei parametri «coordinate». Occorre allora fissare una traslazione: un’origine di un sistema cartesiano, ed una rotazione: una direzione di uno di questi assi. Sempre per una rete planimetrica, se questa fosse misurata con sole letture angolari, si comprende che ogni angolo, la stessa forma della rete, rimane tale e quale anche se la rete avesse una scala completamente diversa da quella reale. In questo caso occorre fissare ad esempio anche la distanza fra due punti della rete od, alternativamente, fissare le coordinate di due vertici della rete, bloccando così in tutto quattro parametri. Nel caso di una rete altimetrica è sufficiente fissare arbitrariamente la quota di un vertice della rete. Questo modo di agire, fissando cioè un datum minimale, si chiama anche compensazione a minimi vincoli, ed assicura che le misure non subiscano deformazioni e compensazioni assieme, presenti in caso contrario nel caso di una scelta ridondante di punti del sistema di riferimento dei quali è necessario rispettare le coordinate. Questa compensazione è anche detta compensazione intrinseca perché il risultato dipende solo dalle misure interne alla rete che si vogliono trattare e non dalle coordinate o parametri esterni da fissare arbitrariamente. Dopo la compensazione intrinseca di una rete tridimensionale, planimetrica od altimetrica, l’inquadramento in un sistema di riferimento (nazionale o globale) avviene rototraslando o traslando le coordinate della rete a minimi vincoli sulla rete nazionale, sfruttando vertici di cui si conoscano le coordinate in entrambi i sistemi od anche misure secondarie, di direzioni o di distanze, non entrate in compensazione, da vertici della rete, verso vertici di coordinate note nel sistema di riferimento (nazionale o globale). Questa operazione si chiama anche fitting di inquadramento. Visto che il modo di fissare il datum è arbitrario ci si chiede: è possibile renderlo meno soggettivo? Ad esempio, per una rete altimetrica si è scelto di fissare il datum scegliendo arbitrariamente la quota di un punto. Per ottenere lo stesso scopo è sufficiente ad esempio scrivere, imporre, una relazione che leghi i parametri incogniti «quote» ad un valore noto a priori. Si può decidere ad esempio che la sommatoria di tutte le quote compensate sia un valore noto. Ogni dislivello rimane ancora invariante per la traslazione del riferimento di quota scelto. Nel caso di reti planimetriche si può decidere che la somma di tutti i parametri incogniti, che sono le correzioni alle coordinate, siano sempre nulle. Con ciò si fissano solo due traslazioni del sistema di riferimento; è possibile fissare il terzo parametro: una rotazione, imponendo che tra le coordinate compensate e le coordinate approssimate di partenza si possa scrivere una trasformazione rotazionale a rotazione nulla. Finora, per una rete altimetrica, o planimetrica, abbiamo fissato, o legato ad una 104 METODI DI RILEVAMENTO E SCHEMI DI MISURA legge, uno o tre parametri che corrispondono ai gradi di libertà di un corpo su una retta o di un corpo su un piano. Ci aspettiamo, nel caso di una rete tridimensionale, considerata come un corpo rigido nello spazio a scala fissata, di dover vincolare sei parametri di datum, fissando cioè arbitrariamente, ad esempio, le coordinate di due punti. Così è in effetti per una rete topografica classica, nel caso si considerino incogniti i valori medi nella rete delle componenti della deviazione della verticale. In caso contrario occorre riconoscere che è già stata implicitamente fatta un’ipotesi che blocca due di questi parametri: l’ipotesi di ritenere noto (invariante per campo piano e noto con legge sferica per campo sferico) il versore n dell’asse zenitale del teodolite. In questo caso, un modo comune di procedere è fissare le coordinate tridimensionali di un punto della rete nonché una direzione azimutale, cioè la direzione degli angoli misurabili nel piano normale ad n. Nel caso di reti GPS si fa implicitamente l’ipotesi che il sistema di riferimento non ruoti, durante la misura di tutte le basi della rete. Ciò è ragionevole anche con grande precisione, se la rete viene misurata in un breve lasso di tempo (una settimana ad esempio). In tal caso il sistema di riferimento può essere fissato con soli tre parametri traslativi: le coordinate di un punto, ad esempio, od ancora tre funzioni che coinvolgano le coordinate di tutti i punti della rete. In questo caso si ipotizza implicitamente che non vi siano parametri di rotazione né di scala incogniti tra base e base o tra sessioni di misura dell’unica rete. Un ultimo cenno va fatto considerando i casi in cui il sistema di riferimento non è fissato correttamente, o meglio, le misure hanno scarso significato rispetto a (un sottoinsieme di solito di) parametri che occorre determinare. Questi casi sono spesso difficili da riconoscere, se non grazie ad un indicatore detto «numero di condizione» della matrice normale, troppo basso. In una rete tridimensionale si potrebbero inserire ad esempio fra le incognite di ogni stazione di misura le componenti ( ξ ,η ) della deviazione della verticale dovute al campo anomalo, o/e la somma di queste e dell’errore di verticalità. Se la rete non è sufficientemente densa ed estesa, ciò che si può ricavare teoricamente risulta numericamente assai mal stimabile. È più conveniente «spostare» questi valori dal gruppo dei parametri incogniti all’insieme dei parametri assunti come datum o legarli ad una legge comune in tutto il rilievo. Equazioni generatrici di una rete planimetrica In una rete planimetrica prendiamo in considerazione questi tipi di misure: – distanze dij tra due punti i e j; – direzioni azimutali tij misurate dalla stazione i verso il punto j ; – azimut ϑ ij misurati dalla stazione i sul punto j; – angoli azimutali α ijk misurati sulla stazione i tra il punto indietro j ed il punto avanti k ; – allineamenti tra tre punti; – misure perpendicolari ad un allineamento. 105 METODI DI RILEVAMENTO E SCHEMI DI MISURA Le equazioni che esprimono queste misure (dette equazioni generatrici), non sono lineari nelle incognite: coordinate dei punti (di stazione ed osservati). Scriviamole una ad una e vediamo come si linearizzano per poter calcolare la matrice disegno: A = ∂f ∂x che serve a progettare la rete ed a calcolare la soluzione ai minimi quadrati. Distanza dij Pj dij Pi Fig. 12.20 – Equazioni generatrici delle distanze in planimetria. La distanza tra i punti i e j si esprime, con il teorema di Pitagora: d ij = ( xj – xi ) 2 + ( yj – yi ) 2 12.2 o, nella forma: ( x j – x i ) 2 + ( y j – y i ) 2 – d ij = 0 12.3 L’equazione si linearizza «attorno» ai quattro valori approssimati dei parametri x 0 : x 0i ,y 0i ,x 0j ,y 0j , vale a dire le derivate vanno calcolate utilizzando tali valori approssimati. Nelle formule che seguono i pedici alle parentesi indicano questo valore approssimato: xj – xi ∂f = – ------------- ; d ij 0 ∂ xi yj – yi ∂f = – ----------- d ij 0 ∂ yi 12.4 xj – xi ∂f = – ------------- ; d ij 0 ∂ xj yj – yi ∂f = – ----------- d ij 0 ∂ yj 12.5 106 METODI DI RILEVAMENTO E SCHEMI DI MISURA Il termine noto vale: l = d ij – ( ( x j – x i ) 2 + ( y j – y i ) 2 )0 12.6 Azimut ϑ ij Nord (Y ) Pj ϑij Pi Fig. 12.21 – Azimut ϑ ij. L'azimut è l’angolo azimutale misurato in Pi tra la direzione del nord (geografico o cartografico a seconda dei casi) ed il punto Pj. L’ azimut tra i punti i e j si esprime con: xj – xi atn ------------- – θ ij = 0 yj – yi 12.7 L’equazione si linearizza attorno ai quattro valori approssimati dei parametri x0: x 0i ,y 0i ,x 0j ,y 0j . I parametri possono essere tutti incogniti o solo in parte: yj – yi ∂f - ; = – ----------- d ij2 0 ∂ xi xj – xi ∂f = ----------- d ij2 0 ∂ yi 12.8 yj – yi ∂f - ; = ----------- d ij2 0 ∂ xj xj – xi ∂f = – ----------- d ij2 0 ∂ yj 12.9 Il termine noto, calcolato anch’esso nei valori approssimati, vale: xj – xi l = θ ij – atn ------------- yj – yi 0 12.10 107 METODI DI RILEVAMENTO E SCHEMI DI MISURA α >0 ϑ= α ϑ= α+2 π α< 0 IV I III II α> 0 ϑ = α+ π α< 0 ϑ= α- π Fig. 12.22 – Costante additiva all’equazione generatrice dell’azimut nei vari quadranti. Si può obiettare che l’equazione 12.7 vale solo nel primo quadrante. Ciò è vero, ed il termine noto 12.10 va corretto di π nel II e III quadrante e di 2π nel IV quadrante2. Le derivate tuttavia non cambiano, dunque le 12.8 e 12.9 sono sempre corrette. Direzioni azimutali tij tij Y δi 0ij Pi o Pj tij X Fig. 12.23 La direzione azimutale è l’angolo azimutale misurato in Pi tra la direzione dello zero del cerchio del teodolite ed il punto Pj. La direzione azimutale differisce dall'azimut tra i punti i e j dell’angolo δ detto «correzione d’orientamento». 2 N.B. Le equazioni angolari saranno espresse in seguito in radianti. 200 gon esprime l’angolo piatto π. 108 METODI DI RILEVAMENTO E SCHEMI DI MISURA Si esprime, secondo la forma tradizionale con: xj – xi atn ------------- – ( t ij + δ i ) = 0 yj – yi 12.11 L’equazione si linearizza attorno ai valori approssimati x0: ( x 0i ,y 0i ,x 0j ,y 0j ,δ i ) . Come si vede l’equazione coinvolge cinque parametri, che possono essere tutti od in parte incogniti: yj – yi ∂f - ; = – ----------- d ij2 0 ∂ xi xj – xi ∂f = ----------- d ij2 0 ∂ yi 12.12 ∂f = –1 ∂ δj 12.13 yj – yi ∂f - ; = ----------- d ij2 0 ∂ xj xj – xi ∂f = – ----------- d ij2 0 ∂ yj 12.14 Il termine noto, calcolato anch’esso nei valori approssimati, vale: xj – xi l = t ij + δ i0 – atn ------------- yj – yi 0 12.15 Anche qui vale la considerazione fatta relativa ai quadranti di misura. Angoli azimutali α ijk Y Pi αijk Pk Pj X Fig. 12.24 L’angolo azimutale misurato in Pj tra il punto indietro i ed il punto avanti k, si ottiene come differenza tra le direzioni azimutali: xj – xi l = t ij + δ i0 – atn ------------- yj – yi 0 12.16 109 METODI DI RILEVAMENTO E SCHEMI DI MISURA α ijk = t jk – t ji 12.17 (È positivo cioè se misurato in senso orario). Per tale motivo ha il vantaggio di essere indipendente dalla direzione dello zero del cerchio, ma ha il noto svantaggio di essere una quantità correlata con gli altri angoli azimutali misurati dalla stessa stazione. Perciò (a meno che sia l’unico angolo misurabile da Pj ) si evita di usare queste equazioni generatrici e si preferisce usare le equazioni delle direzioni azimutali. L’equazione generatrice si esprime con: xk – xj xi – xj atn -------------- – atn ------------- – α ijk = 0 yk – yj yi – yj 12.18 L’equazione si linearizza attorno ai valori approssimati x 0 : ( x 0i ,y 0i ,x 0j ,y 0j ,x 0k ,y 0k ) . Come si vede l’equazione coinvolge sei parametri, che possono essere tutti od in parte incogniti: yi – yj ∂f - ; = – ----------- d ij2 0 ∂ xi xi – xj ∂f = ----------- d ij2 0 ∂ yi yi – yj yk – yj ∂f - – ------------- ; = ----------- d ij2 0 d kj2 0 ∂ xj yk – yj ∂f - ; = ----------- ∂ xk d kj2 0 xk – xj xi – xj ∂f - – ------------= ------------ d kj2 0 d ij2 0 ∂ yj xk – xj ∂f = – ------------ ∂ yk d kj2 0 12.19 12.20 12.21 Il termine noto, calcolato anch’esso nei valori approssimati, vale: xk – xj xi – xj l = α ijk – atn -------------- + atn ------------- yk – yj 0 yi – yj 0 12.22 con le solite convenzioni per il calcolo dell’angolo di direzione. Allineamenti e distanze lungo un allineamento Dati due punti: PI (indietro) e PA (avanti) ed un terzo punto centrale (PC ) che si trova sull’allineamento [PI PA] ad una distanza h , ortogonale a [PI - PA] ed a una distanza s dal punto P I al piede di PC , si può scrivere l’equazione della distanza del punto PC dalla retta che passa per [PI - PA], che è: ( yA – yI ) ( xC – xI ) – ( xA – xI ) ( yL – yI ) k h = --------------------------------------------------------------------------------------- = ---2 2 d ( xA – xI ) + ( yA – yI ) 12.23 l’equazione generatrice può allora scriversi: ( yA – yI ) ( xC – xI ) – ( xA – xI ) ( yL – yI ) --------------------------------------------------------------------------------------- – h = 0 ( xA – xI ) 2 + ( yA – yI ) 2 12.24 110 METODI DI RILEVAMENTO E SCHEMI DI MISURA Il senso positivo è orario da PI verso PA: se il punto PC si trova a destra la distanza h è positiva. Se il punto PC si trovasse lungo l’allineamento PI - PA, varrà: h = 0 il che equivarrebbe a dire anche k = 0 . Come si vede, questa equazione non entra in difetto per posizioni particolari dell’allineamento [PI - PA] e la distanza [PI - PA] è sempre positiva. L’equazione generatrice della distanza s vale a sua volta: ( xA – xI ) ( xC – xI ) + ( yA – yI ) ( yC – yI ) w s – ---------------------------------------------------------------------------------------- = ---- = 0 d ( xA – xI ) 2 + ( yA – yI ) 2 12.25 s si intende positiva da PI verso PA. Non è detto che siano misurati o misurabili contemporaneamente sia h che s: può essere noto ad esempio solo h, specie nel caso in cui h = 0 . In tal caso poi s ed h possono avere precisione diversa: se ad esempio il punto PC è posto in allineamento con un collimatore di precisione, la precisione di h è in genere maggiore di quella di s, ammesso che s sia nota. La linearizzazione delle equazioni di allineamento fornisce sei derivate parziali, tante quante le incognite coinvolte: ( yC – yI ) k ( xA – xI ) ∂h = – -------------------- – ---------------------d ∂ xA d3 ( xC – xI ) k ( yA – yI ) ∂h = -------------------- – ---------------------d ∂ yA d3 ( yC – yA ) k ( xA – xI ) ∂h = --------------------- + ---------------------d ∂ xI d3 ( xA – xC ) k ( yA – yI ) ∂h = ---------------------- + ---------------------d ∂ xI d3 ( yA – yI ) ∂h = -------------------d ∂ xC ( xA – xI ) ∂h = – -------------------d ∂ yC 12.26 Il termine noto varrà: ( yA – yI ) ( xC – xI ) + ( xA – xI ) ( yL – yI ) l = h – --------------------------------------------------------------------------------------( xA – xI ) 2 + ( yA – yI ) 2 12.27 dove le coordinate si intendono quelle assunte come valore approssimato. La linearizzazione delle equazioni della distanza s , misurata lungo un allineamento, fornisce anch’essa sei derivate parziali, tante quante le incognite coinvolte: 111 METODI DI RILEVAMENTO E SCHEMI DI MISURA ( xC – xI ) w ( xA – xI ) ∂s = -------------------- – ----------------------d ∂ xA d3 ( yC – yI ) w ( yA – yI ) ∂s = ------------------- – ----------------------d ∂ yA d3 2x I – x A – x C w ( x A – x I ) ∂s 2y I – y A – y C w ( y A – y I ) ∂h = ----------------------------+ ----------------------= ---------------------------+ ----------------------3 d d ∂ xI ∂ xI d d3 ( xA – xI ) ∂h = -------------------d ∂ xC 12.28 ( yA – yI ) ∂h = – -------------------d ∂ yC Il termine noto varrà: ( xA – xI ) ( xC – xI ) + ( yA – yI ) ( yC – yI ) l = s – ---------------------------------------------------------------------------------------( xA – xI ) 2 + ( yA – yI ) 2 12.29 e le coordinate sono quelle assunte come valore approssimato. Esempio di calcolo e compensazione di una rete planimetrica Compensazione di una intersezione mista di distanze e direzioni azimutali: 1 Y t 13 δ t 12 2 3 Y0= 100 X0= 100 ASSE X Sono note le coordinate (x,y) dei punti: 2≡(690.60, 300.50) m 3≡(200.10, 160.20) m 112 METODI DI RILEVAMENTO E SCHEMI DI MISURA Dalla stazione 1 verso questi punti sono state misurate le distanze: d 12=519.15m ±1cm; d 13=650.20m ±1cm; Inoltre, orientando il teodolite verso il punto 2 si sono misurati: t 13 = α 213 = 55.7956 gon ± 7 ⋅ 10 –4 gon; t 12 = 0 gon ± 7 ⋅ 10 –4 gon. Date le coordinate approssimate del punto 1 ricavate per via grafica: 1 ≡(450.0, 760.6) m, si desidera ricavare la stima delle coordinate del punto 1 e la loro precisione. In questo caso, essendo l’angolo α 213 l’unico angolo misurato dal punto 1, è equivalente risolvere il problema con l’equazione dell’angolo azimutale, senza correlazioni oppure con le due equazioni alle direzioni. Si noti anche che, nel primo caso, si deve scrivere un sistema di tre equazioni (due distanze ed un angolo) nelle due coordinate incognite (x1, y 1). Nel secondo caso un sistema di quattro equazioni (due distanze e due direzioni azimutali) nelle tre incognite: le coordinate del punto 1 e la correzione d’orientamento δ . In entrambi i casi la ridondanza globale vale r = m – n = 1, così che il metodo dei minimi quadrati è applicabile con profitto. I programmi di calcolo e compensazione più evoluti operano, per generalità, con il metodo delle direzioni. Può essere interessante in questo esempio discutere se il datum, il sistema di riferimento, è (o non è) iperdeterminato, in quanto è stato fissato ciò che in apparenza è più del necessario, vale a dire le coordinate di due punti della rete. La risposta è che è iperdeterminato: occorrerebbe risolvere la rete con le sole misure minime e poi rototraslare la rete sui due punti noti. Risolvere la rete significa in questo caso risolvere senza ridondanza un triangolo di cui sono noti due lati e l’angolo compreso. In questa ipotesi non hanno alcun significato i pesi o gli sqm delle tre misure. Il successivo inquadramento: rototraslazione senza variazione di scala, permette di posizionare con ridondanza uno (1) il triangolo, con un fitting minimi quadrati sui punti 2 e 3. In questo secondo passaggio le coordinate dei punti 2 e 3 vengono introdotte senza nessuna ipotesi di peso, derivato dalle misure od assunto a priori. Il risultato sarà che gli scarti saranno equiripartiti sulla congiungente dell’allineamento dei punti 2-3. Per queste ragioni, in questo caso e nei casi analoghi (che si augurano essere molto pochi) si preferisce compensare la rete con datum fissato in maniera iperdeterminata. Le equazioni angolari si scrivono: 3 – x1 atn x-------------- + π – t 13 – δ = ν 1 y3 – y1 x2 – x1 atn -------------- + π – t 12 – δ = ν 2 y2 – y1 113 METODI DI RILEVAMENTO E SCHEMI DI MISURA Le equazioni nelle distanze sono: ( x 3 – x 1 ) 2 + ( y 3 – y 1 ) 2 – d 13 = ν 3 ( x 2 – x 1 ) 2 + ( y 2 – y 1 ) 2 – d 12 = ν 4 Si noti che essendo le direzioni verso 2 e 3 nel secondo e terzo quadrante si è sommato ad entrambe le equazioni il valore π . Per calcolare i termini noti ci manca un valore approssimato della correzione δ . Essendo il cerchio azimutale orientato a zero sul punto 2, la correzione è il valore dell’angolo di direzione (12), che è possibile misurare graficamente. Si ha δ =170 gon (=2.670354 rad). I termini noti l1, l2, l3 ed l4 valgono: 249.9 l 1 = 0.876435 + 2.670354 – atn ------------- – π = 0.010784 (rad) 600.3 240.6 l 2 = 0.0 + 2.670354 – atn ---------------- – π = 0.010584 (rad) – 460.0 l 2 = 650.20 – 249.9 2 + 600.3 2 = – 0.1308 m l 2 = 519.15 – 240.6 2 + 460 2 = – 0.0613 m Formiamo ora la matrice disegno A. Sarà di quattro righe (m =4) e di tre colonne (n =3), quante sono le incognite δ x 1, δ y 1, δ (δ ). La prima riga esprime le derivate rispetto alla prima misura, la seconda le derivate rispetto alla seconda ecc. Prima riga: a 11 = y3 – y1 ∂ f1 -; = – ---------------2 ∂ x1 d 13 a21 = x3 – x1 ∂ f1 -; = – ----------------2 ∂ y1 d 13 a 13 = ∂ f1 = –1 ∂δ Sostituendo i valori si ottiene: 600.3 a 11 = ---------------------2 650.238 – 249.9 a21 = ---------------------2 650.238 a 13 = – 1 Per la seconda riga (e misura) si ha: a 21 = y2 – y1 x2 – x1 ∂ f2 ∂f 460.0 240.6 -= ---------------------; -= ---------------------; = – ---------------a22 = 2 = – ----------------a 23 = – 1 2 2 2 ∂ x1 ∂ y1 519.123 519.123 2 d 12 d 12 Per la terza misura: a 31 = x 3 – x 1 249.9 y 3 – y 1 600.3 ∂f 3 ∂f - = ------------------- ; a 32 = 3 = – -------------= – -------------= ------------------- ; 2 2 650.238 ∂ x1 ∂ y1 d 13 650.238 d 13 a 33 = 0 114 METODI DI RILEVAMENTO E SCHEMI DI MISURA Per la quarta ed ultima misura: a 41 = x2 – x1 y2 – y1 ∂ f4 ∂f – 240.6 460.0 - = ------------------- ; a24 = 4 = – ---------------- = ------------------- ; a 43 = 0 = – ----------------2 2 519.123 519.123 ∂ x1 ∂ y1 d 12 d 12 In definitiva: 1.41979 ⋅ 10 –3 – 0.59105 ⋅ 10 –3 –3 –3 A = 1.70694 ⋅ 10 0.89280 ⋅ 10 0.38432 0.92320 – 0.46347 0.88611 –1 –1 0 0 Occorre ora pesare ciascuna equazione in proporzione inversa alla varianza di ogni misura. Ricordando le (4), e assumendo σ 02 = 1 : 1 p j = -----2- ; σj 2 2 7 ⋅ 10 –4 63.6620 σ 3 = σ 4 = ( 0.01m ) 2 2 σ 1 = σ 2 = ------------------- ; 2 e si ottiene così: p 1 = p 2 = 8.27 ⋅ 10 9 ; p 3 = p 4 = 1 ⋅ 10 4 m 2 Calcoliamo ora la matrice normale N, espressa dalla: N = A T PA N = 4.4397 ⋅ 10 4 5.1052 ⋅ 10 3 – 2.5682 ⋅ 10 7 2.5857 ⋅ 10 4 – 2.4959 ⋅ 10 6 Simmetrica 1.6542 ⋅ 10 10 e la sua inversa N -1: N = 2.5580 ⋅ 10 4 – 1.2080 ⋅ 10 –5 3.9809 ⋅ 10 –7 3.9816 ⋅ 10 –5 – 1.2878 ⋅ 10 –8 Simmetrica 6.8086 ⋅ 10 –10 Il termine noto normale vale: 2.7581 ⋅ 10 5 b = A T Pl = 2.3676 ⋅ 10 4 – 1.7673 ⋅ 10 8 ed infine, la soluzione è: δ x̂ 1 δ x̂ = δŷ 1 δ(δ ) = N –1 b – 0.0807m = – 0.0113m – 0.01083rad 115 METODI DI RILEVAMENTO E SCHEMI DI MISURA I valori compensati delle coordinate del punto 1 e della correzione d’orientamento sono: 1≡(449.919, 760.489)m; δ =(170-0.01083*63.6620)gon =169.3105 gon Ricaviamo ora il vettore degli scarti νˆ dopo la compensazione, secondo le: – 4.5108 ⋅ 10 –6 –6 νˆ = A δ x̂ – l = 4.5108 ⋅ 10 – 0.0046 – 0.0015 rad rad m m Ed ora calcoliamo la stima σˆ02 , secondo la: m ∑ pjν̂j 2 ν̂ T Pν̂ j=1 - = -------------- = 0.5677 σˆ02 = ------------------- m–n m–n (il valore è adimensionale). Si noti che σˆ02 < σ 02 fissato a priori =1. Ora ricaviamo la matrice di varianza covarianza delle coordinate: C x̂x̂ = σˆ 02 N –1; σ x2 σ xy σ x δ σ y2 σ y δ C x̂x̂ = simmetrica σ δ2 1.4464 ⋅ 10 –4 – 6.8301 ⋅ 10 –6 – 2.2509 ⋅ 10 –7 = 2.2513 ⋅ 10 –5 7.2813 ⋅ 10 –9 simmetrica 3.8497 ⋅ 10 –10 e, in definitiva: σ x = ± 0.0121m; σ y = ± 0.0048m; σ δ = ± 12.52m Si può infine valutare a posteriori la precisione delle misure dopo la compensazione, o meglio, la stima della precisione degli scarti dopo la compensazione, per mezzo della matrice di varianza covarianza degli scarti: C ν̂ν̂ = σˆ02 [ P –1 – AN –1 A T ] C ν̂ν̂ 2.034 ⋅ 10 –11 – 2.026 ⋅ 10 –11 2.054 ⋅ 10 –8 2.034 ⋅ 10 –11 – 2.054 ⋅ 10 –8 = 2.0915 ⋅ 10 –5 simmetrica 6.6556 ⋅ 10 –9 – 6.6556 ⋅ 10 –9 6.7496 ⋅ 10 –6 2.1862 ⋅ 10 –6 ricavando così: σ ν1 = σ ν2 = ± 2.86 ⋅ 10 –4 gon 116 METODI DI RILEVAMENTO E SCHEMI DI MISURA σ ν3 = ± 4.56mm; σ ν4 = ± 1.48mm Si noti che gli sqm angolari sono migliori (più piccoli) degli sqm delle misure angolari ipotizzate a priori di 7 ⋅ 10 –4 gon ed anche che gli sqm degli scarti delle due distanze sono diversi fra loro e più piccoli degli sqm a priori delle distanze, ipotizzati di ±10mm. Infine ricaviamo la matrice di ridondanza, definita dalla: 1 R = ------ P ⋅ C ν̂ν̂ ˆ σ2 0 od anche dalla: R = I – PAN –1A T 12.30 Evitando i complessi conti matriciali si può ricavare: 2 p i σ νi r ii = ----------σˆ 2 0 ed infine: r 11 = r 22 = 0.2965; r 33 = 0.367; r 44 = 0.040 Si verifica che r 11 + r 22 + r 33 + r 44 = 1 , che è la ridondanza globale r (r =1 in questo esempio). Questi valori indicano il contributo di ogni misura alla rigidità complessiva della rete. Come si nota dalla forma 12.30 questi valori possono essere calcolati senza bisogno delle misure l. Nel nostro caso possiamo affermare che la quarta misura ha pochissima influenza sulla rigidità della rete. Ciò era progettabile in anticipo, prima di eseguire le misure. In questo caso, d’altra parte, non possiamo permetterci il lusso di progettare reti con ridondanza nulla e quindi senza controllo interno alcuno. In altre circostanze, da un progetto preliminare di una rete, se una misura risulta avere bassa ridondanza locale, si decide di solito di non eseguirla. Qui di seguito è riportato il listato dell’uscita di un programma automatico di calcolo e progettazione di reti, denominato CALGE (del Politecnico di Milano), eseguito con i dati di questa piccola rete di esempio. 117 Tabulato di uscita di CALGE UNITÀ DI MISURA: MISURE ANGOLARI in gon MISURE LINEARI in m CORREZIONI E PARAMETRI ANGOLARI CORREZIONI E COORDINATE LINEARI gon m RESIDUI E SQM ANGOLARI dmgon RESIDUI E SQM LINEARI mm PRECISIONE A PRIORI DELLA RETE TOPOGRAFICA SIGMA ZERO (CC) 100. SQM DELLE OSSERVAZIONI TOPOGRAFICHE: ANGOLI AZIMUTALI dmgon 10. DISTANZE (mm) 10.+10.*D (km) DISLIVELLI (mm) 1.*SQRT(D) (km) MISURE DI ANGOLI E DISTANZE N. PUNTI DIREZIONI AZIMUTALI IND. AV. I-A A-I (gon ) (gon ) 1 1 2 0.0000 2 1 3 55.7956 3 1 2 4 1 3 LATI 4 LATI RIGIDI DISTANZE INCLINATE I-A A-I (m) (m) 519.150 650.200 0 PUNTI E COORDINATE APPROSSIMATE N. PUNTO FIX 1 2 3 1 2 3 0 2 2 PUNTI 3 COORD.X (m) 450.000 690.600 200.100 PUNTI FISSI LATI LATI RIGIDI 4 0 VERTICI VERTICI FISSI COORD.Y (m) 760.600 300.500 160.200 2 3 2 TERMINI NOTI ED SQM DELLE EQUAZIONI AGLI ANGOLI E ALLE DISTANZE N. PUNTI DIREZIONI AZIMUTALI DISTANZE IND. AV. I-A SQM A-I SQM I-A (cc) (cc) (cc) (cc) (mm) 1 1 2 -6737.9 7.0 2 1 3 -6865.1 7.0 3 1 2 61.3 4 1 3 130.8 SQM T. NOTO = ITERAZIONE N. ITERAZIONE N. ITERAZIONE N. 79339.5 1 2 3 SIGMA ZERO = SIGMA ZERO = SIGMA ZERO = 58.0 57.9 57.9 CORREZIONI COORDINATE COMPENSATE E SQM N. PUNTO FIX 1 2 3 1 2 3 0 2 2 COORDINATA COMPENSATA X COORDINATA COMPENSATA Y CORREZ. VALORE SQM CORREZ. VALORE SQM (m) (m) (mm) (m) (m) (mm) -0.0833 449.9167 14.0 -0.1150 760.4850 4.8 0.0000 690.6000 0.0 0.0000 300.5000 0.0 0.0000 200.1000 0.0 0.0000 160.2000 0.0 CORREZIONI ORIENTAMENTI DELLE STAZIONI E SQM N. PUNTO CORREZ. VALORE SQM (gon ) (gon ) (CC) 1 1 -0.68954 169.31046 14.1 N. MEDIA (VAL) -27.8 -38.3 -6895.4 3 3 1 SQM 48.1 66.4 0.0 RMS (SQM) 8.1 2.8 14.1 MAX 14.0 4.8 14.1 COORDINATA X COORDINATA Y ORIENTAMENTO SCARTI-RESIDUI DELLE EQUAZIONI ALLE MISURE DI ANGOLI E DISTANZE N. PUNTI DIREZIONI AZIMUTALI DISTANZE IND. AV. I-A SQM A-I SQM I-A SQM (CC) (CC) (CC) (CC) (mm) (mm) 1 1 2 1.7 1.7 2 1 3 -1.7 1.7 3 1 2 -2.0 2.0 4 1 3 -7.4 7.4 N. 2 2 MEDIA (VAL) 0.0 -4.7 SQM 2.4 3.8 RMS (SQM) 1.7 5.4 MAX 1.7 7.4 SIGMA ZERO 57.9129 90.9694 (ANG. E LIN. A 1 KM) EQUAZIONI 4 INCOGNITE VINCOLO SISTEMA DI RIFERIMENTO: VINCOLI DOVUTI A LATI RIGIDI VINCOLI DOVUTI A PUNTI FISSI RIDONDANZA 1 ITERAZIONI DIREZIONI AZIMUTALI DISTANZE 7 0 4 2
Scaricare