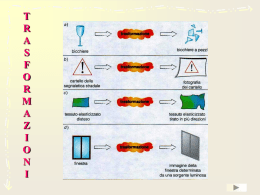
TRASFORMAZIONI GEOMETRICHE DEFINIZIONE AFFINITA’ TRASLAZIONI SIMILITUDINI ISOMETRIE ROTAZIONI DILATAZIONI OMOTETIE SIMMETRIE USCITA TRASFORMAZIONI GEOMETRICHE Una trasformazione geometrica è una corrispondenza biunivoca tra i punti di un piano P(x,y) P’(x’,y’) L’espressione analitica della trasformazione è data da x' f x t: y' g x USCITA TRASFORMAZIONI GEOMETRICHE IDENTITA’: trasformazione che associa ad ogni punto il punto stesso TRASFORMAZIONE INVOLUTORIA: - trasformazione uguale alla sua inversa; - applicata 2 volte, dà un’identità AFFINITA’: Particolari trasformazioni USCITA AFFINITA’ x' a1 x b1 y c1 t: y' a 2 x b2 y c2 a1b2 a2b1 se 0 affinità diretta AB AB se 0 non è un' affinità se 0 affinità indiretta o contraria AB BA USCITA AFFINITA’ Si conservano l’allineamento tra i punti e il parallelismo Si trasformano coniche in coniche PARTICOLARI AFFINITA’ ISOMETRIE SIMILITUDINI DILATAZIONI USCITA ISOMETRIE Si conservano le distanze tra punti Condizione affinchè un’affinità sia un’isometria a12 + a22 = b12 + b22 = |a1b2 – a2b1 | = 1 PARTICOLARI ISOMETRIE SIMMETRIE ROTAZIONI TRASLAZIONI USCITA SIMMETRIE SIMMETRIA CENTRALE rispetto ad un punto C xC ; y C 1 x ' 2 xC x C : y' 2 yC y SIMMETRIA ASSIALE rispetto ad una retta r:y=mx+q 1 x' x cos 2 y q sen 2 y ' x sen 2 y q cos 2 r : r USCITA ROTAZIONI =1 Dato un punto C e un angolo orientato C , x' x xC cos y yC sen xC : y' x xC sen y yC cos yC La trasformazione inversa di una rotazione è sempre una rotazione di centro C ma di angolo – USCITA TRASLAZIONI =1 Dato un vettore v (a,b) x' x a : y' y b P x, y P' x a, y b v USCITA SIMILITUDINI Condizione affinchè un’affinità sia una similitudine a12 + a22 = b12 + b22 = │ a1b2 – a2b1 │ = k2 = D dove k è il rapporto di similitudine se k = 1 la similitudine è un’isometria Similitudine diretta a 2 b2 0 x’ = ax + by + c1 y’ = - bx + ay + c2 k 2 a 2 b2 Similitudine inversa x’ = ax + by + c1 y’ = + bx - ay + c2 a 2 b2 0 k 2 a 2 b2 USCITA OMOTETIE Un’omotetia di centro O(0;0) ha equazioni: x' k x : y' k y Con k R 0 k2 Le rette unite sono tutte le rette passanti per il centro di omotetia USCITA DILATAZIONI di centro O (0,0) x' h x O : y' k y di centro C (xc yc) x ' xC h x xC C : y' yC k y yC
Scaricare