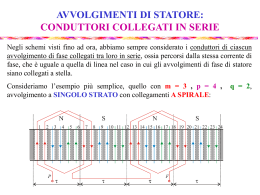
ARCHITETTURA DEI GRUPPI AD ASSE VERTICALE Gli alternatori ad asse verticale accoppiati con turbine idrauliche sono sempre dotati di un cuscinetto reggispinta tipo Michell che deve equilibrare il peso del gruppo e l’eventuale spinta idraulica della turbina. La disposizione più semplice che consente il migliore accesso al reggispinta e quella con cuscinetto posto superiormente e con una trave portante che scarica la spinta sul piano di centrale attraverso lo statore della macchina elettrica. Per macchine molto lente (50 - 200 giri/min) e quindi di grande diametro la trave portante per sopportare il carico con una freccia accettabile verrebbe ad assumere dimensioni e peso troppo elevati. Si pone in questo caso il cuscinetto Michell fra la turbina e l’alternatore, eliminando il cuscinetto di guida superiore. Si ha così la macchina ad “ombrello” con il rotore che presenta spesso le razze inclinate verso il basso in modo da abbassare il baricentro e migliorare la stabilità del gruppo. Si può anche avere il “mezzo ombrello” per il quale si adotta una disposizione che comprende anche un cuscinetto di guida superiore. ALTERNATORE AD ASSE VERTICALE CON TRAVE PORTANTE SUPERIORE Reggispinta Cuscinetti di guida VISTA SCHEMATIZZATA DI UN CUSCINETTO MICHEL SEZIONE ASSIALE DI UN CUSCINETTO MICHEL CUSCINETTO MICHEL MONTATO ALTERNATORE AD OMBRELLO Reggispinta Cuscinetti di guida ALTERNATORE A MEZZO OMBRELLO Reggispinta Cuscinetti di guida SCHEMA DI RAFFREDDAMENTO IN CIRCUITO APERTO DI UN ALTERNATORE AD ASSE VERTICALE SCHEMA DI RAFFREDDAMENTO IN CIRCUITO CHIUSO DI UN ALTERNATORE AD ASSE VERTICALE REFRIGERANTI STATORI DEI GRANDI TURBOALTERNATORI Per i turboalternatori di grande potenza si usano lamierini a cristalli orientati, disponendo i settori in modo da avere l’orientamento dei cristalli lungo il giogo. Poiché il peso del giogo di un turboalternatore è dell’ordine di 5 - 10 volte quello dei denti si ottiene in tal modo una utilizzazione quasi ottimale dei lamierini a cristalli orientati. Per i turboalternatori di grande potenza è importante limitare gli effetti delle vibrazioni a doppia frequenza originate dalla ovalizzazione del pacco statore, che è soggetto a vibrazioni a frequenza doppia. UTILIZZAZIONE DEI LAMIERINI A CRISTALLI ORIENTATI NELLO STATORE DI UN TURBOALTERNATORE B Ciò viene ottenuto con il montaggio elastico del pacco di lamierini che viene sostenuto con barre cilindriche. Nei turboalternatori raffreddati con idrogeno devono essere previste opportune tenute che sono collocate di regola sugli scudi, all’interno dei cuscinetti. Deve inoltre essere previsto un impianto che provveda al trattamento sotto vuoto dell’olio usato per le tenute dell’idrogeno. La carcassa deve essere progettata per resistere alla sovrapressione generata da una eventuale esplosione dell’idrogeno. MONTAGGIO ELASTICO DEL PACCO STATORICO SOSTENUTO DA SBARRE CILINDRICHE TENUTA DI IDROGENO DI TIPO ASSIALE INGRESSO OLIO LATO IDROGENO CONSUMO INDICATIVO DI H2 PER GRANDI TURBOALTERNATORI (UNA BOMBOLA CONTIENE 6 NORMAL m3 DI H2) Perdite m3/giorno 14 12 10 8 Perdite m3/giorno 6 4 2 0 0,05 1 2 3 Pressione H kg/cm 2 4 RAFFREDDAMENTO DELLE MACCHINE ELETTRICHE DI GRANDE POTENZA Per turboalternatori di potenza maggiore di 100 MVA si adotta l’idrogeno come fluido di raffreddamento sfruttandone contemporaneamente la minore viscosità, che dà luogo a meno elevate perdite per ventilazione e il maggiore calore specifico che porta ad una maggiore efficienza di raffreddamento. Per potenze superiori a 300 MVA si adotta il raffreddamento diretto con acqua demineralizzata nei conduttori di statore e diretto con idrogeno nei conduttori di rotore. È stato anche utilizzato, se pur raramente, il raffreddamento diretto con acqua demineralizzata nei conduttori di rotore. Il riempimento di idrogeno viene di regola fatto con un riempimento intermedio di CO2 per evitare la formazione di miscele esplosive, Nel caso di raffreddamento diretto con acqua le zone (o le semizone) di statore sono raffreddate in parallelo. In tal caso deve essere quindi previsto un impianto demineralizzatore per mantenere sempre ad un livello adeguato la resistività dell’acqua. Tale impianto, costituito da un deionizzatore a letto misto, utilizza resine a scambio ionico che entrano in azione quando la conducibilità dell’acqua supera un limite prestabilito. SCHEMA SEMPLIFICATO DI DEMINERALIZZAZIONE DELL’ACQUA DI RAFFREDDAMENTO DELLO STATORE AVVOLGIMENTO DEIONIZZATORE REFRIGERANTE SERBATOIO POLMONE POMPE FILTRO MORFOLOGIA DEI ROTORI DELLE MACCHINE SINCRONE A POLI SALIENTI Anche per i rotori è necessario distinguere macchine a poli salienti e macchine a rotore isotropo: Nel primo caso il rotore è costituito da un albero, o da due tronchi d’albero, per le macchine di maggior potenza, da una lanterna in ghisa o in acciaio fuso calettata sull’albero o a cui sono fissati i due tronchi mediante prigionieri. Sulla lanterna sono calettati a caldo anelli di acciaio che costituiscono i gioghi di rotore. Questi anelli, per gli alternatori ad ombrello, possono essere costruiti, per motivi di trasporto, da lamierini spessi (4 - 5 mm) intessuti e fissati con tiranti. Negli anelli sono praticate scanalature a coda di rondine o più frequentemente a testa di martello necessarie per fissare i poli. Per macchine lente la lanterna può essere composta con un mozzo e delle razze costruite con lamiere saldate. A seconda della velocità della macchina le varie parti possono essere accorpate in un unico componente, ad esempio per macchine a 6 - 8 poli albero, lanterna ed giogo rotore possono costituire un tutto unico. Nel caso di macchine veloci di grande potenza il componente che costituisce in un unico pezzo mozzo, lanterna e giogo statore può essere in un unico pezzo o a dischi imbuettati fra loro e tenuti assieme da tiranti. I poli sono, nella maggior parte dei casi, costruiti con lamierini tranciati spessi 1,5 - 2 mm, tenuti assieme da tiranti e/o da un barrotto centrale in acciaio. Questa soluzione costruttiva appare la più semplice ed economica tenendo conto che è necessario ottenere gli alloggiamenti delle barre dell’avvolgimento di smorzamento e le sagome degli ancoraggi a testa di martello. ANCORAGGI DEI POLI DI MACCHINE SINCRONE A POLI SALIENTI A CODA DI RONDINE A TESTA DI MARTELLO Per equilibrare la componente tangenziale della forza centrifuga, che agisce sulle spire degli avvolgimenti rotorici vengono impiegati i cunei interpolari. Il loro numero viene determinato considerando il lato dell’avvolgimento oggetto di verifica come una trave con molti appoggi, a cui sia applicato un carico uniformemente distribuito pari alla componente tangenziale della forza centrifuga. Più modernamente si possono eliminare i cunei interpolari costruendo i corpi polari con sezione trapezia. Per macchine lente, con molti poli, i cunei interpolari possono non essere necessari. CUNEI INTERPOLARI ELIMINAZIONE DELLA COMPONENTE TANGENZIALE DELLA FORZA CENTRIFUGA SULL’AVVOLGIMENTO DI ECCITAZIONE MORFOLOGIA DEI ROTORI DEI TURBOALTERNATORI I rotori dei turboalternatori sono costituiti fondamentalmente da un unico fucinato in acciaio ad alta resistenza nel quale sono praticate mediante fresatura le cave per alloggiare l’avvolgimento di eccitazione e per l’eventuale raffreddamento. La forza centrifuga sulle testate dell’avvolgimento di eccitazione è contrastata da due cappe di blindaggio poste alle estremità del rotore. Gli avvolgimenti sono bloccati nelle cave da chiavette in lega di alluminio ad alta resistenza. CAPPE DI BLINDAGGIO NEL ROTORE DI UN TURBOALTERNATORE AVVOLGIMENTI CONCENTRATI Sono impiegati nei seguenti casi: avvolgimenti di eccitazione di macchine sincrone a poli salienti, in questi casi si deve tenere conto che sono montati su parti rotanti; avvolgimenti di eccitazione di macchine a commutazione: serie; derivata; indipendente; composta. avvolgimenti ausiliari di macchine a commutazione. AVVOLGIMENTI CONCENTRATI PER MACCHINE SINCRONE A POLI SALIENTI ISOLAMENTO VERSO MASSA ISOLAMENTO DI SPIRA f.m.m. GENERATA DAI POLI SISTEMAZIONE DELLE BARRE DELLA GABBIA DI SMORZAMENTO IN CAVE SEMICHIUSE ANELLO DI CORTO CIRCUITO BARRA DELLA GABBIA DI SMORZAMENTO GIUNTI FLESSIBILI DI DILATAZIONE Sono ottenuti avvolgendo di costa un piatto di rame, o nei casi di maggiore potenza, saldando agli angoli una serie di elementi rettilinei in piatto di rame per ottenere una spirale che viene interavvolta con una spirale in vetro resina spesso in forma di prepreg. Poiché questi avvolgimenti sono sistemati sul rotore, è necessario equilibrare un modo efficace gli sforzi derivanti dalla forza centrifuga, tenendo conto della plasticità del rame e del fatto che, a meno di particolari scelte costruttive, essi sono soggetti ad una componente tangenziale della forza centrifuga, che tende a sfilare le spire dall’espansione polare. Le barre della gabbia di smorzamento sono sistemate in cave semichiuse. AVVOLGIMENTI CONCENTRATI E DI COMPENSAZIONE PER LE MACCHINE A COMMUTAZIONE Sugli statori delle macchine a commutazione sono sistemati i seguenti avvolgimenti Avvolgimenti concentrati sui poli principali, per creare il flusso utile. Questi avvolgimenti sono sistemati secondo l’asse polare, sono analoghi agli avvolgimenti concentrati delle macchine sincrone anche se non presentano i problemi legati alla forza centrifuga, che in questo caso è evidentemente assente. Hanno un numero di spire ed una sezione che dipende dal tipo di eccitazione. Avvolgimenti sui poli ausiliari, in serie all’avvolgimento indotto, che creano un campo secondo l’asse interpolare, concentrato sulla spira in commutazione. Hanno la funzione di attenuare la tensione di reattanza, ed in assenza di avvolgimenti di compensazione, di attenuare localmente la reazione di indotto. Sono costituiti da poche spire avvolte di piatto attorno ai poli ausiliari. Avvolgimenti di compensazione, sono costituiti da un avvolgimento a barre, poste in serie all’avvolgimento indotto. Le barre sono inserite nelle espansioni polari dei poli principali. Creano un campo trapezio, secondo l’asse interpolare, che ha la funzione di attenuare la reazione di indotto, adeguandosi automaticamente al valore della corrente di carico. AVVOLGIMENTI DI ECCITAZIONE PRINCIPALI, AUSILIARI E DI COMPENSAZIONE IN MACCHINE A COMMUTAZIONE MONTAGGIO DELL’AVVOLGIMENTO DEI POLI PRINCIPALI PROGETTO DI UNA MACCHINA SINCRONA A POLI SALIENTI Anche in questo caso si deve partire dai dati di specifica che costituiscono il punto di partenza di ogni progetto e l’elemento fondamentale dei rapporti fra fornitore e cliente: tipo di raffreddamento (in ciclo aperto o chiuso); fluidi e tecniche di raffreddamento; frequenza nominale; velocità di rotazione; numero di coppie polari; numero delle fasi dell’avvolgimento indotto; numero dei morsetti e loro collegamento; potenza apparente nominale; potenza reattiva a cos= 0 ant.; fattore di potenza nominale; tensione nominale di indotto; corrente nominale; tipo di eccitazione; tensione e corrente di eccitazione; specificazione delle perdite, eventuali criteri di compensazione; rendimento a diverse condizioni di carico e di cos; per i generatori: tipo di motore primo; per i motori: tipo di avviamento, macchina operatrice da azionare. DETERMINAZIONE DELLE DIMENSIONI PRINCIPALI Si utilizza la costante di utilizzazione per determinare il diametro al traferro Di e la lunghezza L della macchina: P Cu nD2i L con P in kVA, n in giri/min, Di ed L in metri. Per P = 20 - 70 MVA si ha Cu = 5 -7. Ricordiamo anche che si ha: Cu B A i PRINCIPALI DIMENSIONI DELLO STATORE lcv l1 L Di La scelta del diametro al traferro e della lunghezza della macchina dipende, fra l’altro, dalla costante di tempo meccanica del gruppo e quindi dal suo momento d’inerzia e da eventuali problemi legati alle velocità critiche dell’albero. Fra il diametro al traferro e la lunghezza dello statore si può porre la relazione empirica: L 0,25 0,5 2p p oppure riferirsi ad opportuni diagrammi. Nelle grandi macchine occorre tenere conto delle sollecitazioni prodotte dalla forza centrifuga. Nella relazione precedente 2p sono i poli e p è il passo polare al traferro pari a: D i p 2p Se ncv è il numero di canali di ventilazione si ha: L l 1 n cv 1 l cv n cv Orientativamente si ha: l1 = 55 - 65 mm ; lcv = 10 - 15 mm Si può a questo punto determinare la lunghezza netta del ferro di indotto Lf, introducendo il fattore di stipamento Ks che nel nostro caso può essere assunto pari a 0,92. Si ha quindi: Lf = (L - lcvncv)Ks = l Ks Si osserva che L, lunghezza dello statore compresi i canali di ventilazione, corrisponde praticamente alla lunghezza del rotore, che, nel caso di poli laminati, presenta però un diverso valore di Ks. Ricordiamo che si ha: Nc ncs I qm2pncs I Ai Di a Di a Con: Nc = numero totale di cave di indotto; ncs = numero di conduttori per cava di indotto; I = corrente nominale di indotto; a = numero di rami in parallelo di indotto; q = numero di cave per polo e fase m = numero di fasi Per Ai si possono adottare i seguenti valori orientativi: A i 100 120 3 p per 2p > 8 per 2p = 4 A i 75 90 3 p Ai = 3,5 p per 2p =2 Considerando che in ogni caso si deve avere: Ai = 450 - 700 (Afili/cm) Ottenuto Ai si possono ricavare Nc, ncs e q. Si determina quindi il flusso utile u: u Vn 2 3K f d p fN f Dove si è posto: Kf = fattore di forma pari a 1,11 in regime sinusoidale; Nf = numero di conduttori in serie per una fase; Vn = valore nominale della tensione concatenata; sin q 2 fattore di distribuzione dell’avvolgimento; d qsin 2 p sin y p 2 fattore di passo dell’avvolgimento. con y = passo reale dell’avvolgimento; a = angolo elettrico fra due cave adiacenti. In un primo tempo si può assumere un valore di p di tentativo che andrà successivamente verificato. Verifichiamo il valore di B0: B0 u 2 p l i Si può assumere: B0 = 0.8 - 0,95 T Dove li è la lunghezza ideale al traferro che tiene conto della disuniformità creata dai canali di ventilazione. Si introduce perciò un secondo fattore di Carter Kv. Si può allora porre: li = l Kv Calcoliamo ora Kv: K v 1 l cv l 1 l cv 1 5 0 1 l cv Se si ammette che tutto il flusso passi nel dente si può porre: c li B0 = 0,92 bd Lf Bd 0,92 bd l Bd Si può quindi ricavare bd : c B0li c B0 bd 0,92B d l 0,92B d assumendo: Bd = 1,8 - 2 T Si determina infine la larghezza della cava bc: bc = c - bd Orientativamente si deve avere: bc/ c = 0,4 - 0,6 Osserviamo che si potrebbe seguire un percorso duale, scegliendo prima l’induzione al traferro e verificando successivamente la congruità del valore della densità lineare di corrente che ne deriva. Ovviamente i due percorsi sono assolutamente equivalenti. DETERMINAZIONE DEL TRAFERRO Per determinare lo spessore del traferro determiniamo il valor massimo della fmm di indotto: ASM = 0,9 dp (m/2) ncs q I Consideriamo ora il valore medio della f.m.m. di indotto sotto l’espansione polare: A sm A SM sin 2 2 Dove è l’angolo elettrico sotteso dall’espansione polare, se si ha il passo intero con: per /2 = /3 e A sm 1,07n cs qI 3 sin ; 2 2 DETERMINAZIONE DELL’ANGOLO ELETTRICO SOTTESO DALL’ESPANSIONE POLARE =p Introduciamo ora il fattore di Carter per le cave che tiene conto della discontinuità fra cava e dente: K c 1 bd c 1 5 0 1 bd Dove si è posto: bd = larghezza del dente al traferro; 0 = minimo spessore del traferro; c = bd + bc passo cava con: bc = larghezza della cava. Si può porre per la caduta di tensione magnetica al traferro: As = 1 - 1,4 Asm D’altra parte si ha: As = 0,8 Kc B0 0 106 Se si pone K = 1,25 si ottiene: As = B0 0 106 Si ha quindi il valore minimo del traferro pari a: Iqn cs 0 1,1 1,4 10 4 (cm) B0 DIMENSIONAMENTO DELL’AVVOLGIMENTO DI STATORE Per dimensionare l’avvolgimento di statore scegliamo la densità di corrente cs. A seconda del tipo di raffreddamento, della sezione del conduttore e dello spessore dell’isolamento, per raffreddamento indiretto in aria si ha: cs = 2,3 - 4,5 A/mm2 Si ottiene quindi la sezione del conduttore: S cs I a cs Per macchine di grande potenza, o comunque per forti correnti e quindi elevate sezioni di avvolgimento, il conduttore di statore viene suddiviso in conduttori elementari che vengono trasposti con il metodo Rœbel. Un valore orientativo dello spessore dell’isolamento verso massa si può ottenere dalla seguente relazione binomia, nella quale il termine costante pesa maggiormente nel caso di tensioni basse, mentre il secondo termine acquista importanza via via che aumenta la tensione nominale: 2his = (1,4 + 0,5 V) (mm) Con V tensione nominale in kV e 2his bispessore dell’isolamento. Si procede a questo punto alla stesura di un piano cava tenendo conto delle dimensioni di tutti gli elementi che compongono gli avvolgimenti ed il loro isolamento, compresi elementi non sempre presenti come una eventuale precava e stecche isolanti in testa od in fondo cava ed eventuali molle laterali. Sulla base di queste considerazioni si compila una tabella riassuntiva. Normalmente si ha hc/bc = 4,5 - 7 CAVA DI STATORE E PIATTINA ELEMENTARE bc h3 b1 h2 his hi3 hp h1 hc hi1 h1 hi2 bp PIANO CAVA np piattine isolate di sez. bp x hp Isolamento verso massa Isolamento fra due file di piattine Tolleranza bobina Tolleranza impaccatura Larghezza cava Altezza di uno strato Altezza di 2 conduttori Stecca isolante fondo cava Stecca isolante lato zeppa Interstrato Zeppa Precava Altezza cava Larghezza bp x 2 + 2his + bi + Altezza (hp x np) + 2his+ - tb + ti = bc - tb = h1 2h1 + 2hi2 + 2hi3 + hi1 + h2 + h3 = hc CALCOLO DEL CIRCUITO MAGNETICO A questo punto si procede al completamento del dimensionamento del circuito magnetico della macchina ed alla determinazione della f.m.m. As0 necessaria per stabilire la tensione a vuoto (E) ai morsetti della macchina. Si ripete tale calcolo per alcuni valori di E in modo da avere gli elementi per tracciare la caratteristica a vuoto: E = E(Iecc) A tale scopo si deve applicare al circuito magnetico della figura il teorema della circuitazione: Hdl A Dove l’integrale viene esteso ad una linea di flusso che attraversa il traferro in corrispondenza dell’asse polare, cioè dove presenta il minimo spessore 0. In pratica diventa più agevole approssimare l’integrale con una sommatoria del tipo: H l i i so A s0 Dove Hi è il valore della forza magnetica nei diversi tratti che compongono il circuito magnetico della macchina mentre li è la loro lunghezza. Operativamente si segue il seguente schema: Si suddivide il circuito magnetico in tronchi a induzione costante o con andamento determinato. Si determina il valore di B nei vari tronchi. Se necessario, avvalendosi delle curve di magnetizzazione dei materiali, si determina il corrispondente valore di H. Conoscendo le lunghezze dei diversi tratti di circuito magnetico si determinano le f.m.m. parziali Asi. Sommando le diverse Asi si determina la f.m.m. totale As0, necessaria per ottenere la f.e.m. a vuoto E. Si ripete il calcolo per diversi valori di E in modo da poter tracciare la caratteristica a vuoto della macchina. SCHEMA PER IL CALCOLO DEL CIRCUITO MAGNETICO 3 2 1 4 5 6 SUDDIVISIONE DEL CIRCUITO MAGNETICO IN TRONCHI OMOGENEI 1 2 3 4 5 6 Il circuito magnetico della macchina si può suddividere nei seguenti tratti: Traferro (due attraversamenti). Denti di statore (due attraversamenti). Giogo di statore Espansioni polari (due attraversamenti). Corpi polari (due attraversamenti). Giogo di rotore. FORZA MAGNETOMOTRICE AL TRAFERRO Come già detto si considerano due attraversamenti in corrispondenza del minimo traferro di valore 0. Essendo stato scelto il valore di B0 si ha: B d0 0 A s 0 Se si considera la lunghezza del traferro in metri il valore di 0 ed il doppio attraversamento si ottiene: As = 1,6 Kc B0 0 106 FORZA MAGNETOMOTRICE NEI DENTI DI STATORE Ricordiamo che avevamo ottenuto: c B0li c B0 bd 0,92B d l 0,92B d Avendo posto B = 1,8 - 2 T. In realtà se si considerano i valori dell’induzione nei denti non è ammissibile considerare nulla l’induzione in cava. Ciò comporta che l’induzione reale nei denti è inferiore rispetto al valore ipotizzato. Se indichiamo con ll pedice d le grandezze riferite ai denti e con il pedice c le grandezze riferite alla cava si ha: Bc 0 Se indichiamo con un apice le grandezze ideali si ha: ’d = d + c Introduciamo il rapporto Kd fra la sezione in aria della cava e la sezione del dente: c K sb d Kd K sb d Si ha allora per l’induzione: B’d = Bd + Bc Kd Si ottiene quindi l’induzione reale nel dente: Bd = B’d - Bc Kd Se ammettiamo che i denti siano tubi di flusso sia ha: Hd = Hc = H Si può quindi scrivere: Bc = 0 H e quindi Bd = B’d - Kd 0H É possibile quindi ricavare Bd per via grafica utilizzando la curva di magnetizzazione del materiale, tracciando una retta con pendenza Kd 0 a partire da B’d sull’asse delle ordinate. DETERMINAZIONE DELL’INDUZIONE REALE NEI DENTI DI STATORE B’d B (T) Bd2 Bd1 Bd Bd H (As/m) Kd 0 H Per macchine di grande potenza con due conduttori per cava, la cava ha forma rettangolare e quindi il dente ha forma trapezia. Trascurando la strettoia prodotta dalla zeppa l’induzione varia linearmente lungo il dente. Nota Bd si possono quindi determinare facilmente Bd2 e Bd1. Si ricavano quindi dalla caratteristica di magnetizzazione Hd, Hd2 ed Hd1. Si ricava infine un valore medio Hdm di H eseguendo una media pesata: H dm H d 4H d1 + H d2 6 ed infine: A sd 2H dm h d FORZA MAGNETOMOTRICE NEL GIOGO DI STATORE Nel giogo di statore il flusso si ripartisce in due parti uguali, si ha quindi nella sezione lungo l’asse interpolare: u u g Bg e 2 2 hgLf Dove hg è l’altezza del giogo. In pratica si determina hg ponendo: Bg = 1,4 - 1,5 T Nella realtà il flusso non è uniformemente distribuito nella sezione del giogo e le linee di flusso sono di diversa lunghezza. DETERMINAZIONE DELLA f.m.m. NEL GIOGO DI STATORE ’g hg 0 Si tiene conto di ciò moltiplicando Bg per un coefficiente minore di 1: B’g = 0,85 Bg Si determina quindi utilizzando la curva di magnetizzazione dei lamierini il corrispondente valore di Hg e si procede al calcolo delle amperspire nel giogo di statore: Asgs = Hg ’p Dove con ’p si è indicato il passo polare determinato in corrispondenza di hg/2. FORZA MAGNETOMOTRICE NEL ROTORE Per quanto si riferisce al rotore è sono normalmente trascurabili le seguenti cadute di f.m.m.: nelle espansioni polari a causa della sezione elevata e di una ridotta lunghezza del tratto di circuito magnetico; nel giogo di rotore poiché la sezione richiesta dalle verifiche di stabilità meccaniche portano ad una sezione sovrabbondante dal punto di vista magnetico. Determiniamo innanzitutto il profilo dell’espansione polare. DETERMINAZIONE DEL PROFILO DELL’ESPANSIONE POLARE 0 4 3 2 hp 1 bp bp1 f.m.m. GENERATA DAI POLI Nelle macchine sincrone a poli salienti l’onda di f.m.m. presenta un andamento trapezio. È opportuno quindi sagomare il traferro sotto l’espansione polare in modo da ottenere per l’induzione una forma d’onda più vicina a quella sinusoidale. Si pone quindi: 0 0 p cos cos 2 2 Lo spessore dell’espansione polare si determina in base a considerazioni meccaniche tenendo conto delle sollecitazioni centrifughe prodotte dall’avvolgimento di eccitazione. Per l’ampiezza dell’espansione polare si assume: 2 bp p 3 Per valutare l’induzione nel polo è necessario tenere conto del flusso disperso. Un calcolo esatto richiede una determinazione del campo magnetico mediante tecniche di analisi numerica. In prima approssimazione si può ammettere che nelle diverse sezioni del poli si abbia una dispersione, passando da una sezione all’altra, del 5%. Si può cioè approssimativamente ammettere che: 4 = u 3 = 1,05 u 2 = 1,10 u 1 = 1,15 u Si può inoltre assumere: Bp1 = 1,5 T Si calcola quindi la sezione del corpo polare: 1 Sp B p1 Si ottiene quindi la larghezza del polo: b p1 Sp LK sp Il fattore di stipamento si introduce nel caso di poli laminati e si può assumere: Ksp = 0,95 Mediamente si ha: h p 0,8b p1 Dai flussi nelle diverse sezioni si determinano Bp2 e Bp3. Dalla curva di magnetizzazione si ottengono Hp1, Hp2, ed Hp3. Si determina quindi il valore medio di H: H pm H p1 4H p2 H pe 6 Infine la caduta di f.m.m. nel polo vale: Asp = 2Hpm hp DETERMINAZIONE DELLA AMPERSPIRE TOTALI A VUOTO Si può a questo punto determinare la f.m.m. totale a vuoto: As0 = As + Asd + Asgs + Asp È a questo punto possibile tracciare la caratteristica a vuoto e considerare quindi il comportamento della macchina a carico. DETERMINAZIONE DELLE REATTANZE DELL’AVVOLGIMENTO INDOTTO I flussi prodotti dalle correnti indotte, concatenati con l’indotto ma non concatenati con l’induttore, si stabiliscono in circuiti che presentano ampi tratti in aria, possono quindi essere valutati, non tenendo in conto la saturazione del materiale ferromagnetico. Di tali flussi si può tenere conto introducendo una reattanza di dispersione, che tenga conto dei seguenti flussi dispersi: flusso disperso all’interno delle cave; flusso disperso lungo i collegamenti frontali; flusso disperso al traferro. FLUSSO DISPERSO ALL’INTERNO DELLE CAVE Se consideriamo le linee di induzione che si sviluppano in cava osserviamo che hanno un percorso, parzialmente nel ferro e parzialmente all’interno della cava, cioè in materiale non ferromagnetico. È sufficiente quindi valutare la permeanza in cava trascurando il tratto che si sviluppa nel ferro. Tale permeanza potrà essere considerata costante al variare della corrente. Si può quindi definire un cofficiente di autoinduzione e quindi la relativa reattanza di dispersione. Il coefficiente di autoinduzione, in generale, vale: n L x x i E ricordando che si ha: x in x x Avendo posto x pari alla permeanza del tratto xesimo in parallelo di circuito magnetico. In definitiva quindi si ottiene: L = n2x x Applichiamo questa relazione ad alcuni casi tipici rappresentativi di situazioni particolarmente frequenti. INDUTTANZA DI DISPERSIONE IN UNA CAVA SEMICHIUSA CON AVVOLGIMENTO A SEMPLICE STRATO È un caso frequente in piccole macchine, l’avvolgimento è costituito da molti conduttori in serie, in filo smaltato. Determinando la permeanza dei tratti in cava posti in parallelo, l’induttanza di dispersione in una cava può essere, misurando le lunghezza in metri, espressa da: h1 h 2 2h 3 h 4 -6 L 1,25 n l 10 H 3b 1 b 1 b 1 b 2 b 2 ' c 2 cs Possiamo esprimere separatamente la permeanza del tratto in cava con l’espressione: h1 h2 2h 3 h 4 6 c 1,25 10 3b 1 b 1 b 1 b 2 b 2 Si può a questo punto ottenere il cofficiente di autonduzione per una fase in una macchine con 2p poli, q cave per polo e per fase ed ncs conduttori per cava: L c ncs2 2p q l c (H) DISPERSIONE IN UNA CAVA CHIUSA CON AVVOLGIMENTO A SEMPLICE STRATO b2 h3 h4 h2 Bx h1 x b1 INDUTTANZA DI DISPERSIONE IN UNA CAVA APERTA CON AVVOLGIMENTO A DOPPIO STRATO È un il caso normale per le grandi macchine, l’avvolgimento è costituito da conduttori a barre, con isolamento micato, a teste embricate in numero di 2 per cava. Determinando la permeanza dei tratti in cava posti in parallelo, l’induttanza di dispersione in una cava può essere espressa da: 2h1 h2 h3 h5 4h4 6 L 41,25 l 10 H b1 b1 b 2 3b1 ' c Possiamo esprimere separatamente la permeanza del tratto in cava con l’espressione: 2h1 h 2 h 3 h 5 4h 4 6 c 1,25 10 b1 b1 b 2 3b1 Si può a questo punto ottenere il cofficiente di autonduzione per una fase in una macchine con 2p poli, q cave per polo e per fase e 2 conduttori per cava: L c 42p q l c (H) DISPERSIONE IN UNA CAVA APERTA, AVVOLGIMENTO A PASSO INTERO, A DOPPIO STRATO CON n = 2 b1 b2 h5 h4 h4 h3 Bx h1 h2 h1 x DETERMINAZIONE DELLA REATTANZA DI DISPERSIONE IN CAVA In generale la reattanza di dispersione in cava vale quindi: X c n cs2 2p q l c ( ) Osserviamo che a parità del prodotto nq all’aumentare del numero delle cave, cioè al diminuire di ncs, si ha una diminuzione della dispersione. Per q piccolo (ad esempio pari ad 1) la dispersione è prevalentemente al traferro ed il calcolo perde di validità DETERMINAZIONE DELLA REATTANZA DI DISPERSIONE NELLE TESTATE Il calcolo della dispersione prodotta dal flusso che si stabilisce nei collegamenti frontali dell’avvolgimento si presenta molto complesso a causa del gran numero di fattori che ne influenzano la configurazione. Un approccio corretto, anche se molto complesso, consiste nel ricorso a tecniche di calcolo numerico. In alternativa o a completamento delle tecniche di calcolo numerico,, si possono utilizzare dati sperimentali, peraltro molto difficili da acquisire. DISPERSIONE IN TESTATA In via puramente orientativa, per un avvolgimento a semplice strato a passo intero si può porre: t 0,65 10 6 Dove è il semipasso polare espresso in metri. La permeanza per m di passo polare vale: t 0,6510 6 Nel caso di un avvolgimento a doppio strato a teste embricate a passo intero si può porre: t 0,6510 6 Si ha, a questo punto la reattanza di dispersione corrispondente per una fase: Xt ncs2 q2 2p t Osserviamo che ogni testata è costituita per ogni fase di ncsq conduttori, che i collegamenti frontali sono in numero di p per ciascun lato della macchina, e quindi in totale 2p. Si ha infine che lo sviluppo di ciascun collegamento frontale è proporzionale a. VALUTAZIONE DELLA DISPERSIONE AL TRAFERRO Consideriamo una macchina bipolare alla quale sia stato estratto il rotore. Se alimentiamo lo statore con un sistema trifase simmetrico, si stabilisce un flusso rotante creato da un’onda di f.m.m. il cui valore massimo vale: A sm m 0,9 e n cs qI 2 dove si è posto: e p d DISPERSIONE AL TRAFERRO A P C D D/2 B Supponiamo che in un dato istante la f.m.m. di indotto presenti il suo massimo in C, sarà quindi nulla in A ed in B, e presenterà un massimo di segno opposto in D. In un punto qualsiasi P la f.m.m. varrà: As = Asm sin La linea di forza uscente da P ha una lunghezza s: D s sin 2 Si ha quindi una proporzionalità fra s ed As. Si ha quindi una distribuzione uniforme del campo ed il flusso vale: 0 LD m 0,9 e n cs qI Wb D 2 2 Se si considera una macchina trifase, a passo intero con e = 0,96, una corrente di 1 A ed L in metri si ha: 3,24ncs qL10 -6 Wb Questa espressione vale anche per macchine a più coppie polari. La f.e.m. indotta in ciascuna fase da questo flusso coincide con la reattanza: X= 2,22 0,96 1 f ncs q 2p 1,10 ncs2 q2 2p L 10-6 = = ncs2 q2 2p L Dove si è posto: = 1,1 10-6 La reattanza totale dello statore vale quindi: Xd = Xc + Xt + X e quindi cl X d 2p n q t L q 2 cs 2 Questa reattanza corrisponde alla reattanza misurata sullo statore a rotore estratto e si può identificare con buona approssimazione con la reattanza di dispersione. Se l’avvolgimento è a passo raccorciato bisogna tenere conto dei seguenti fattori: In alcune cave si hanno conduttori appartenenti a fasi diverse, cio comporta una riduzione di Xc secondo il coefficiente Kc < 1 riportato in tabella. y/p (%) 100 90 80 70 66,6 Kc 1,00 0,92 0,85 0,70 0,75 Le amperspire di statore e quindi 1 diminuiscono secondo p. La f.e.m. indotta diminuisce ancora secondo p , quindi Xd diminuisce secondo p2. Anche Xt diminuisce proporzionalmente a p2. In definitiva si ottiene: cl 2 2 X d 2pn q K c t p p L q 2 cs 2 Per macchine a poli salienti a passo intero si può usare la seguente formula semiempirica (Rebora): X d 2pn 2cs q 2 LCs Con i valori di Cs riportati in tabella: q Cs 2 3,1 3 2,9 4 2,75 5 2,6 6 2,4 8 2,2 10 2 12 1,85 14 1,8 Valori medi normali per Xd% sono: Tipo di macchina Piccole macchine a poli salienti Medie macchine a poli salienti Grandi macchine a poli salienti X (%) 10 - 15 15 - 20 20 - 25 Per i turboalternatori si ha: cl 2 2 X d 2pn q K c t p p L q 2 cs 2 0,5 Con che tiene conto della minore dispersione al traferro. La reattanza di dispersione nei turboalternatori può arrivare al 20 - 25 %. RESISTENZE DEGLI AVVOLGIMENTI DISTRIBUITI La determinazione della resistenza degli avvolgimenti distribuiti si presenta piuttosto complessa. Infatti i collegamenti frontali sono costituiti, per gli avvolgimenti a teste embricate, da tratti di evolvente che si sviluppano su tronchi di cono, di cilindro o, più raramente, su corone circolari. Il calcolo può essere effettuato con tecniche di calcolo numerico, che consentono contemporaneamente di ottenere tutti gli altri elementi necessari per caratterizzare l’avvolgimento. In questa sede diamo una espressione che consenta un calcolo di massima: Se Ld è la lunghezza del tratto diritto della semizona la lunghezza media lm di un conduttore a teste embricate è riportata, al variare dei poli nella tabella seguente. lm Ld + (0,9 1)p Ld + (1,2 1,3)p Ld + (1,4 1,5)p Ld + 1,6p 2p 2 4 6 >6 La resistenza Rc di un singolo conduttore vale quindi: lm Rc Scs La resistenza in corrente continua Rcs di una fase di statore vale quindi: R ' cs N tf R c a Con Ntf numero di conduttori appartenenti ad una fase. E’ tuttavia necessario tenere conto anche delle perdite addizionali con un coefficiente Kad che dipende dalla sezione delle piattine elementari, dalla loro posizione in cava, dalla forma della cava, dalla frequenza e dalla resistività del materiale: Rcs = Kad R’cs DETERMINAZIONE DELL’EFFETTO DELLE CORRENTI PARASSITE NELL’AVVOLGIMENTO INDOTTO La non uniforme distribuzione del flusso di dispersione in cava, prodotto dalla corrente di indotto, produce un incremento delle perdite nei conduttori di statore. Le relazione che consentono la determinazione di tali perdite, schematizzabili con un aumento della resistenza ohmica per un fattore Kad, dipendono dal tipo di avvolgimento ed in particolare dal piano cava prescelto. Consideriamo il caso di un doppio strato con 2 conduttori per cava. DISPERSIONE IN UNA CAVA APERTA, AVVOLGIMENTO A PASSO INTERO, A DOPPIO STRATO CON n = 2 b1 b2 h5 h4 h4 h3 Bx h1 h2 h1 x CAVA DI STATORE E PIATTINA ELEMENTARE bc h3 b1 h2 his m/2 = np hi3 hp h1 hc hi1 h1 hi2 n=2 bp PIANO CAVA np piattine isolate di sez. bp x hp Isolamento verso massa Isolamento fra due file di piattine Tolleranza bobina Tolleranza impaccatura Larghezza cava Altezza di uno strato Altezza di 2 conduttori Stecca isolante fondo cava Stecca isolante lato zeppa Interstrato Zeppa Precava Altezza cava Larghezza bp x 2 + 2his + bi + Altezza (hp x np) + 2his+ - tb + ti = bc - tb = h1 2h1 + 2hi2 + 2hi3 + hi1 + h2 + h3 = hc Nel caso di passo intero: con 0<<5 si ha: K ad m 2 0,2 4 1 9 Con passo raccorciato di 1/3 si ha: K ad (mm) 0,815m 2 0,2 4 1 9 dove è: = hp Il parametro vale: 0 nb p 2b c nelle precedenti formule si ha: m = 2np n=2 = 2f = resistività del materiale conduttore impiegato valutata alla temperatura di riferimento prevista dalle Norme. DIMENSIONAMENTO DELL’AVVOLGIMENTO DI ROTORE L’avvolgimento di rotore è realizzato con piatto di rame avvolto di costa di sezione: Scr = a*b Il raggio di curvatura deve soddisfare la seguente relazione: 0,05b 2 R a E per b/a = 20 si ottiene: R=b COSTRUZIONE DELL’AVVOLGIMENTO DI ROTORE lmr r a b x isolamento di spira = 0,2 - 0,3 mm prepreg isolamento verso massa = 5 - 10 mm elettrovetro x 0,01L p hp 1,3 (cm) Poiché ciascuna linea di flusso interessa due poli la f.m.m. a carico per polo vale: Ascp = Asc/2 Se si avesse una sola spira si avrebbe una sezione S’cr del conduttore di rotore pari a: S’cr = Ascp /r r vale 2,5 - 3,5 A/mm2 per bobine a più strati e 4 - 5 A/mm2 per bobine ad uno strato. Con Nr spire si ottiene la sezione di una spira rotorica: Scr = S’cr / Nr Mentre la corrente di eccitazione vale: Ie = Ascp / Nr La tensione di eccitazione Ve è 80 - 200 V per macchine di piccola potenza e 350 - 1000 V per macchine di grande potenza. La tensione di eccitazione per polo vale Vep = Ve /2p La resistenza dell’avvolgimento di rotore vale: Ve Ve N r l r N 2r r Rr 2p Ie A scp A scp Da cui si ottiene: Ve Nr 2pl r r E’ quindi possibile calcolare tutti gli elementi caratteristici dell’avvolgimento rotorico, rivedendo se necessario le dimensioni del corpo e dell’espansione polare. DETERMINAZIONE DELLE PERDITE E DEL RENDIMENTO Il rendimento vale della macchina vale: 1 P p Pn cosn Pp dove si ha: P p Pmec Pfe Pcus Pcur Pbr Padd Pecc Ppl Avendo posto: Pmec = perdite meccaniche per attrito e ventilazione Pfe = perdite nel ferro statore. Pcus = perdite nei conduttori di statore. Pcur = perdite nei conduttori di rotore. Pbr = perdite alle spazzole. Padd = perdite addizionali non calcolate. Pecc = perdite nel gruppo di eccitazione se da conteggiarsi. Ppl = perdite sulla superficie delle espansioni polari. PERDITE MECCANICHE Sono dovute all’attrito nei cuscinetti ed alla ventilazione. Una valutazione approssimata vale: Pmec cPn n Dove c può essere assunto pari a: c = 0,3 - 0,45 PERDITE NEL FERRO STATORE Per calcolare le perdite nei materiali magnetici di statore è innanzitutto necessario determinare separatamente i pesi Gd dei denti e Gg del giogo: Gd = fe Sd Lfe Nc ; Gg = fe hg Lfe Dmg Dove si ha: Sd = sezione di un dente; Sg = sezione del giogo statore; Dmg = diametro medio del giogo statore. In linea teorica le perdite nel ferro si possono calcolare, moltiplicando la cifra di perdita, valutata all’induzione di lavoro, per il peso del tratto di circuito magnetico considerato, o in via approssimata considerando la cifra di perdita proporzionale a B2. In pratica è necessario tenere conto, con un coefficente K diverso per i denti e per il giogo, dell’aumento delle perdite nei materiali magnetici, causate dalle operazioni di tranciatura e di impaccatura. Si ha in definitiva: Per i denti: Pfed K fedGdpB K fedGdp1Bd2 con Kfed = 1,4 - 1,7 Per il giogo: Pfeg K feg G g p B K feg G g p 1 B g2 con Kfeg = 1,3 - 1,5 p è la cifra di perdita del materiale ferromagnetico. PERDITE NEI CONDUTTORI DI STATORE Nei conduttori di statore si deve tenere conto delle perdite ohmiche e delle perdite addizionali prodotte dalle correnti parassite. In una macchina trifase, se I è la corrente corrispondente al carico prescelto si ha: Pcus = 3 Kad Rcs I2 PERDITE NEI CONDUTTORI DI ROTORE E AGLI ANELLI Le perdite nei conduttori di rotore valgono: Pcur = Rr Ie2 Le perdite agli anelli (o alle spazzole) si valutano convenzionalmente pari a: Pbr = 2 Ie assumendo pari a 2V la caduta di tensione al doppio passaggio delle spazzole. PERDITE NEL GRUPPO DI ECCITAZIONE, SULLE ESPANSIONI POLARI E ADDIZIONALI NON CALCOLATE Se il gruppo di eccitazione comprende un generatore le relative perdite devono essere conteggiate ai fini del calcolo del rendimento. A causa dell’alternanza dente - cava si hanno perdite per correnti parassite sulla superficie che possono, in prima approssimazione essere così valutate: cbc Pfe Ppl 1,65 0 100 Si hanno infine altre perdite addizionali non valutabili che si assumono pari a 10% della somma delle perdite fino ad ora calcolate.
Scaricare