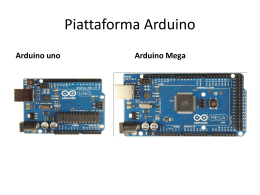
Arduino
Examples
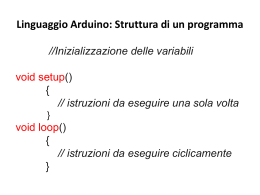
Main Program
#include …
// vars declaration
void setup(){
//initialisation instructions
}
void loop(){
//main program
}
Read digital value from a PIN
int inPin = 7;
void setup(){
pinMode(inPin, INPUT);
}
void loop(){
boolean val = digitalRead(inPin);
}
Write digital value to a PIN
Int outPin = 13;
void setup(){
pinMode(outPin, OUTPUT);
}
void loop(){
digitalWrite(outPin, HIGH);
delay(1000);
digitalWrite(outPin, LOW);
delay(1000);
}
Read analog value from a PIN
Maps Input from 0V–5V to 0-1023
int analogPin = 7;
int val;
void setup(){
pinMode(inPin, INPUT);
Serial.begin(9600);
}
void loop(){
val = analogRead(analogPin);
Serial.println(”Val : ” + val);
}
PWM - Pulse Wave Modulation
int ledPin = 9;
void setup(){
pinMode(ledPin, OUTPUT);
}
void loop(){
// set duty cycle 0-255 @ 490 Hz
analogWrite(ledPin, 128);
}
Receive bytes from Serial
int incomingByte = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
if (Serial.available() > 0) {
incomingByte = Serial.read();
Serial.print("I received: ");
Serial.println(incomingByte, DEC);
}
}
Tone
Generates a square wave of the specified
frequency (and 50% duty cycle) on a pin.
tone(pin, frequency) tone(pin, frequency,
duration)
noTone()
pin: the pin on which to generate the tone
frequency: the frequency of the tone in hertz - unsigned int
duration: the duration of the tone in milliseconds - unsigned long
Metro
#include <Metro.h> //Include Metro library
#define LED 13 // Define the led's pin
int state = HIGH;
Metro ledMetro_1 = Metro(5000);
Metro ledMetro_2 = Metro(10000);
void setup(){
Serial.begin(9600);
}
void loop(){
if (ledMetro_1.check() == 1) {
Serial.println("accendo led 1");
delay(200);
Serial.println("spengo led 1");
}
if (ledMetro_2.check() == 1) {
Serial.println("accendo led 2");
delay(200);
Serial.println("spengo led 2");
}
}
Frequent Conversions
Convert long to char*
char* buffer[12];
long value = 1234;
itoa(value,buffer,10);
Convert String to long
String number = "1234";
Serial.println(number.toInt());
Software Serial
#include <SoftwareSerial.h>
#define rxPin 4
#define txPin 5
SoftwareSerial mySerial =
SoftwareSerial(rxPin, txPin);
void setup(){
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
Serial.begin(9600);
mySerial.begin(9600);
}
void loop(){
if(mySerial.available() != 0){
char someChar = mySerial.read();
Serial.println(someChar);
}
}
Piezo Sensor
Piezo Sensor
const int ledPin = 13;
const int sensorPin = 0;
const int THRESHOLD = 100;
void setup()
{
pinMode(ledPin, OUTPUT);
}
void loop()
{
int val = analogRead(sensorPin);
if(val>=THRESHOLD)
{
digitalWrite(ledPin, HIGH);
delay(100);
}
else
digitalWrite(ledPin, LOW);
}
Temperature Sensor (LM35)
Temperature Sensor (LM35)
const int sensorPin = A0;
void setup(){
Serial.begin(9600);
}
void loop(){
int value = analogRead(sensorPin);
float millivolts = (value/1024.0) * 5000;
float celsius = millivolts/10;
Serial.print(celsius);
Serial.println("°C");
delay(1000);
}
Analog Distance Sensor
Photo Resistor
Vout
5V
A0
GND
Arduino
Sender/Receiver
4
5
Sender
Receiver
Sender Code
//Sender
#include <SoftwareSerial.h>
SoftwareSerial mySerial(4,5); //Rx,Tx
void setup(){
Serial.begin(9600);
mySerial.begin(9600);
}
void loop(){
if(Serial.available() > 0)
mySerial.write(Serial.read());
}
Receiver Code
//Receiver
#include <SoftwareSerial.h>
SoftwareSerial mySerial(4,5); //Rx,Tx
void setup(){
Serial.begin(9600);
mySerial.begin(9600);
}
void loop(){
if(mySerial.available() > 0)
Serial.write(mySerial.read());
}
Interrupts
• interrupts()
• noInterrupts()
• attachInterrupt(interrupt, function, mode)
– Interrupt: 0=PIN2, 1=PIN3
– Function: callback
– Mode:
– LOW
– CHANGE
– RISING
– FALLING
Debouncing
const int inputPin = 2; // the number of the input pin
const int ledPin = 13; // the number of the output pin
const int debounceDelay = 10; // milliseconds to wait until stable
boolean debounce(int pin)
{
boolean state;
boolean previousState;
previousState = digitalRead(pin); // store switch state
for(int counter=0; counter < debounceDelay; counter++) {
delay(1); // wait for 1 millisecond
state = digitalRead(pin); // read the pin
if( state != previousState){
counter = 0; // reset the counter if the state changes
previousState = state; // and save the current state
}
}
return state;
}
Ethernet Server 1/2
#include <SPI.h>
#include <Ethernet.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
IPAddress ip(192,168,1, 177);
// Initialize the Ethernet server library
// with the IP address and port you want to use
// (port 80 is default for HTTP):
EthernetServer server(80);
void setup() {
Serial.begin(9600);
// start the Ethernet connection and the server:
Ethernet.begin(mac, ip);
server.begin();
Serial.print("server is at ");
Serial.println(Ethernet.localIP());
}
Ethernet Server 2/2
void loop() {
EthernetClient client = server.available();
if (client) {
Serial.println("new client");
boolean currentLineIsBlank = true;
while (client.connected()) {
if (client.available()) {
char c = client.read();
Serial.write(c);
if (c == '\n' && currentLineIsBlank) {
client.println("HTTP/1.1 200 OK");
client.println("Content-Type: text/html");
client.println("Connnection: close");
client.println();
client.println(“Body...”);
break;
}
if (c == '\n') {
currentLineIsBlank = true;
}
else if (c != '\r') {
currentLineIsBlank = false;
}
}
}
delay(1);
client.stop();
Serial.println("client disonnected");
}
Ethernet Client
#include <Ethernet.h>
#include <SPI.h>
byte arduino_mac[]
byte arduino_ip[]
byte server_ip[]
int server_port
=
=
=
=
{ 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED };
{ 192, 168, 1, 120 };
{ 192, 168, 1, 130 };
1984;
EthernetClient client;
String pattern = "GET /?temp=$temp HTTP/1.0";
String getTemp(){
return String(analogRead(A0));
}
void setup(){
Serial.begin(9600);
Ethernet.begin(arduino_mac, arduino_ip);
}
void loop(){
if (client.connect(server_ip, server_port)){
pattern.replace("$temp",getTemp());
client.println(pattern);
client.println(); //required by the standard
client.stop();
}
delay(5000);
}
RFID Reader 1/3
RFID Reader 2/3
#include <SoftwareSerial.h>
const
const
const
const
int
int
int
int
startByte = 10; // ASCII line feed precedes each tag
endByte = 13;
// ASCII carriage return terminates each tag
tagLength = 10; // the number of digits in tag
totalLength = tagLength + 2;
//Inizializzare la SoftwareSerial sui PIN 4,5
char tag[tagLength + 1]; // holds the tag and a terminating null
int bytesread = 0;
void setup() {
//Settare la velocità delle due seriali a 9600
pinMode(2,OUTPUT); // connected to the RFID ENABLE pin
digitalWrite(2, LOW); // enable the RFID reader
}
RFID Reader 3/3
void loop() {
if(mySerial.available() >= totalLength)
{
if(mySerial.read() == startByte) {
bytesread = 0; // start of tag so reset count to 0
while(bytesread < tagLength) // read 10 digit code
{
int val = mySerial.read();
if((val == startByte)||(val == endByte))
break;
tag[bytesread] = val;
bytesread = bytesread + 1; // ready to read next digit
}
if(mySerial.read() == endByte)
{
tag[bytesread] = 0; // terminate the string
Serial.print("RFID tag is: ");
Serial.println(tag);
}
}
}
}
Bluetooth Adapter
TX
GND
RX
5V
Bluetooth Adapter
• SparkFun BlueSmirf Bluetooth Adapter
– Serial transmitter/receiver
– Baud rate: 115200 baud
– Datasheet:
http://www.sparkfun.com/datasheets/RF/BlueSMiRF_v
1.pdf
• Android Test App
– GetBlue (from Google Play)
– Manual pair, passkey: 1234
Using Bluetooth Adapter
Using Bluetooth Adapter
#include <SoftwareSerial.h>
const int rxpin = 2;
Const int txpin = 3;
SoftwareSerial bluetooth(rxpin, txpin);
void setup(){
Serial.begin(9600);
bluetooth.begin(9600); // initialize the software serial port
bluetooth.println("Bluetooth ready");
}
void loop(){
if (bluetooth.available()){
char c = (char)bluetooth.read();
Serial.write(c);
}
if (Serial.available())
{
char c = (char)Serial.read();
bluetooth.write(c);
}
}
Serial.println("Serial ready");
Lettore / Scrittore
A1
Scrittore
2
10
5
4
10
2
A2
Lettore
Scrittore
Scrive su un buffer 5 byte
Avvisa il lettore che il buffer è pronto per la lettura
Attende che il lettore finisca di leggere tutti I byte
Lettore
Attende che lo scrittore finisca di scrivere tutti I byte
Legge tutti I byte
Avvisa lo scrittore dell’avvenuta lettura
Scrittore 1/2
#include <SoftwareSerial.h>
#define rxPin 4
#define txPin 5
int signalPIN = 10;
byte array[5] = {123, 100, 34, 55, 18};
boolean canWriteBool = true;
SoftwareSerial mySerial =
SoftwareSerial(rxPin, txPin);
void canWrite(){
Serial.println("Posso scrivere");
canWriteBool = true;
}
void setup(){
Serial.begin(9600);
mySerial.begin(9600);
pinMode(signalPIN, OUTPUT);
digitalWrite(signalPIN, LOW);
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
attachInterrupt(0, canWrite, RISING);
}
Scrittore 2/2
void loop(){
while(!canWriteBool);
for(int i=0; i<5; i++){
Serial.println("Scrivo "+(String)+array[i]);
}
mySerial.write(array, 5);
canWriteBool = false;
digitalWrite(signalPIN, LOW);
digitalWrite(signalPIN, HIGH);
digitalWrite(signalPIN, LOW);
delay(3000);
}
Lettore 1/2
#include <SoftwareSerial.h>
#define rxPin 4
#define txPin 5
int signalPIN = 10;
SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin);
void canRead(){
Serial.println("Interrupt");
while(mySerial.available() != 0)
{
Serial.println(mySerial.read());
}
digitalWrite(signalPIN, LOW);
digitalWrite(signalPIN, HIGH);
digitalWrite(signalPIN, LOW);
}
Lettore 2/2
void setup(){
Serial.begin(9600);
mySerial.begin(9600);
pinMode(signalPIN, OUTPUT);
digitalWrite(signalPIN, LOW);
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
attachInterrupt(0, canRead, RISING);
}
void loop(){
}
References
• Official site : www.arduino.cc
• Book : Arduino cookbook
– w2.homelinux.org/mediawiki/images/0/0
7/Arduino_cookbook.pdf
Scaricare