G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 1 di 80
Corso di Impianti Elettrici Industriali
Parte 1C
Fondamenti di Impianti Elettrici
Dopo aver ripreso alcuni elementi fondamentali di elettrotecnica e aver fatto alcuni approfondimenti, è giunto
il momento di entrare più nel vivo nel tema degli impianti elettrici. Non si possono affrontare studi di Impianti
Elettrici Industriali se non si alcuni fondamenti di Impianti Elettrici in generale.
In particolare, in questa dispensa vengono forniti i metodi fondamentali per i calcolo di funzionamento degli
Impianti Elettrici: dopo un primo capitolo dedicato al metodo in per unità, basilare per tutti i calcoli, si affronta
il problema del calcolo della condizione di regime e della condizione di guasto. Questi due aspetti - regime e
guasto - sono fondamentali per il dimensionamento di nuovi impianti e per il corretto esercizio di impianti
esistenti. Viene anche dedicato un capitolo al tema del rifasamento: una azione che, spesso, con un limitato
investimento aggiuntivo, consente di migliorare il progetto e l'esercizio degli impianti.
Gli argomenti che potrebbero essere annoverati tra i Fondamenti di Impianti Elettrici sono molti di più di
quelli riportati nelle pagine seguenti, e andrebbero affrontati con maggiore profondità, ma per forza di cose
qui ci si è dovuti limitare agli aspetti davvero essenziali, rispetto alle finalità del corso che è orientato verso
gli Impianti Elettrici Industriali.
Come per le altre dispense, l'autore si scusa di eventuali incompletezze, inesattezze o errori e resta a
disposizione, fin d'ora con gratitudine, a chi vorrà segnalargliene, affinché possano essere emendati nelle
revisioni successive.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 2 di 80
Sommario
9-
Utilizzo dei valori relativi o in per unità (p.u.)......................................................... 3
9.1 - Elementi di teoria ed esempi................................................................................................................3
9.1.1 9.1.2 9.1.3 9.1.4 9.1.5 -
Generalità ....................................................................................................................................................... 3
Sistemi trifase ................................................................................................................................................. 3
Calcolo in p.u. in un sistema con diversi livelli di tensione. ............................................................................. 5
Cambiamento del riferimento di potenza nominale......................................................................................... 8
[Approfondimento] Trasformatori con tensioni fuori nominale....................................................................... 12
9.2 - Esercizi proposti .................................................................................................................................22
9.2.1 - Esercizio 1 .................................................................................................................................................... 22
9.2.2 - Esercizio 2 .................................................................................................................................................... 22
10 - Calcolo dello stato di regime negli impianti elettrici ........................................... 23
10.1 - Elementi di teoria ed esempi..............................................................................................................23
10.1.1 10.1.2 10.1.3 10.1.4 -
Tassonomia dei nodi e caratteristiche dei carichi...................................................................................... 23
Iniezioni nodali e matrice delle ammettenze nodali................................................................................... 24
Le reti radiali ............................................................................................................................................. 26
[Approfondimento] Il problema del Load-Flow........................................................................................... 31
10.2 - Esempio ed esercizi ...........................................................................................................................40
10.2.1 - Soluzione di una rete radiale..................................................................................................................... 40
10.2.2 - Esercizi proposti........................................................................................................................................ 43
11 - Rifasamento ............................................................................................................ 44
11.1 - Elementi di teoria................................................................................................................................44
11.1.1 11.1.2 11.1.3 11.1.4 -
Alcune considerazioni sulla potenza reattiva ............................................................................................ 44
Effetti indesiderati del trasporto di potenza reattiva .................................................................................. 44
Contromisure per ridurre l'incidenza della potenza reattiva ...................................................................... 45
Metodo di calcolo ...................................................................................................................................... 47
11.2 - Esempi ed esercizi .............................................................................................................................48
11.2.1 - Esempio 1 ................................................................................................................................................. 48
11.2.2 - Esempio 2 ................................................................................................................................................. 49
12 - Calcolo delle correnti di cortocircuito .................................................................. 52
12.1 - Elementi di teoria: generalità sul calcolo di cortocircuito e guasti trifase...........................................52
12.1.1 12.1.2 12.1.3 12.1.4 12.1.5 12.1.6 -
Generalità ................................................................................................................................................. 52
Transitori elettromagnetici......................................................................................................................... 54
Comportamento subtransitorio, transitorio, permanente ........................................................................... 55
Transitori elettromeccanici ........................................................................................................................ 57
Metodi “a rete scarica” e “a rete carica” .................................................................................................... 58
Correnti massime e minime di cortocircuito .............................................................................................. 59
12.2 - Elementi di teoria: guasti dissimmetrici ..............................................................................................59
12.2.1 12.2.2 12.2.3 12.2.4 12.2.5 -
Generalità ................................................................................................................................................. 59
Multipolo equivalente ................................................................................................................................ 59
Le sequenze: elementi generali di teoria................................................................................................... 62
Sequenze: utilizzo applicativo ................................................................................................................... 66
Parametri di rete alla sequenza omopolare - Tipi di connessione dei trasformatori .................................. 72
12.3 - Esempio numerico..............................................................................................................................75
12.3.1 12.3.2 12.3.3 12.3.4 12.3.5 -
Risoluzione ............................................................................................................................................... 76
Fasi di calcolo 1, 2, 3 ................................................................................................................................ 76
Fase di calcolo 4 ....................................................................................................................................... 79
Fasi di calcolo 5 e 7 .................................................................................................................................. 80
Fasi di calcolo rimanenti............................................................................................................................ 80
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 3 di 80
9 - Utilizzo dei valori relativi o in per unità (p.u.)
9.1 - Elementi di teoria ed esempi
9.1.1 - Generalità
Per un dato sistema elettrico in cui siano misurabili o comunque definibili valori di tensione, corrente,
impedenza, potenza, etc., tali grandezze, che se espresse nelle rispettive unità misura (V, A, Ω, VA o W o
var, etc.) prendono il nome di grandezze assolute o grandezze in valori fisici, possono anche essere
espresse in termini relativi, dopo aver fissato opportuni valori di riferimento per ciascun tipo di grandezza.
I valori relativi, detti anche valori in per unità (p.u.) di ciascuna grandezza sono allora dati dal rapporto tra i
valori assoluti e il valore di riferimento prefissato, a sua volta espresso nella medesima unità di misura
utilizzata per i valori assoluti.
Solitamente le grandezze in valori assoluti si esprimono mediante lettere maiuscole, accompagnate da
sottolineatura se sono grandezze fasoriali o comunque operatori complessi in un sistema P.A.S.; le
grandezze in valori relativi si esprimono mediante le medesime lettere maiuscole sormontate da un punto
oppure dalle medesime lettere, ma in caratteri minuscoli.
In questa esercitazione verrà usata la sottolineatura per le grandezze fasoriali o comunque complesse e il
punto sovrastante per i valori relativi:
Per esempio: in una rete elettrica ad ogni nodo i-esimo è possibile assegnare una tensione nominale Vni ,
per cui, se la tensione effettiva vale V i in valori assoluti, allora la medesima tensione espressa in valori
relativi vale:
V
V& i = i
Vni
[9.1]
9.1.2 - Sistemi trifase
In un sistema trifase (funzionante in condizioni simmetriche ed equilibrate) possono essere definite le
seguenti grandezze:
V
tensione concatenata in un dato nodo (anche: ai morsetti di un dato componente)
U
tensione di fase in un dato nodo (anche: ai morsetti di un dato componente)
I
corrente di fase in un dato ramo (anche: assorbita o erogata dal componente)
Si ricorda che vale la relazione:
V = 3 ⋅U
[9.2]
(le relazione vale solo in modulo; si noti che nella [9.2] i simboli di fasore sono scomparsi).
Le grandezze di fase sono misurate su una qualunque delle 3 fasi: se il sistema è funzionante in condizioni
simmetriche ed equilibrate, cambiando la fase considerata il modulo delle grandezze non cambia, mentre
l’angolo di fase si sposta di ±120°. E’ però opportuno che la fase considerata sia la medesima per tutti i tipi
di grandezza di fase considerate (tensioni e correnti), e solitamente si usa la fase "a" (o "R").
Si definiscono ancora:
A = P + jQ
potenza apparente, attiva, reattiva
[9.3]
La potenza (assorbita o erogata, a seconda che la corrente sia considerata come positiva se entrante o
positiva se uscente) su una singola fase, per esempio la fase “a” vale:
*
A fase _ a = U a ⋅ I a
[9.4]
Utilizzando la notazione euleriana, siano:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
U a = U ⋅ e jε
I a = I ⋅ e jη
p. 4 di 80
[9.5]
e quindi:
A fase _ a = U a ⋅ I a = U ⋅ I ⋅ e jε ⋅ e − jη = U ⋅ I ⋅ e j (ε − η ) = U ⋅ I ⋅ e jϕ = U ⋅ I ⋅ (cos ϕ + j sin ϕ)
*
[9.6]
dove si è definito: ϕ = ε − η
Considerando la fase “b”, che è sfasata di 120° in ritardo rispetto alla fase “a”, ed esprimendo gli angoli di
fase in radianti, si ha:
A fase _ b = U b ⋅ I b = U ⋅ I ⋅ e j (ε−2 π 3) ⋅ e − j (η−2 π 3 ) = U ⋅ I ⋅ e j (ε−2 π 3−η+2 π 3 ) = U ⋅ I ⋅ e j (ε−η ) =
*
= U ⋅ I ⋅ e jϕ = U ⋅ I ⋅ (cos ϕ + j sin ϕ) = A fase _ a
[9.7]
e quindi tale potenza è identica a quella della fase “a”; al medesimo risultato si perviene per la fase “c”;
quindi:
A = 3 ⋅ U ⋅ I = 3 ⋅ U ⋅ I ⋅ (cos ϕ + j sin ϕ)
*
[9.8]
Solitamente per i sistemi trifasi si è soliti utilizzare nelle descrizioni e nei calcoli la tensione concatenata più
che quella di fase; per cui si utilizza più frequentemente:
A = 3 ⋅ U ⋅ I ⋅ (cos ϕ + j sin ϕ) = 3 ⋅ V ⋅ I ⋅ (cos ϕ + j sin ϕ)
[9.9]
e in modulo:
A = 3 ⋅ U ⋅ I = 3 ⋅V ⋅ I
[9.10]
Si noti nella [9.10] che: la tensione è concatenata; la corrente è di fase; l'angolo ϕ è l'angolo tra la tensione
di fase e la corrente di fase. E' quindi assolutamente errata, nel calcolo in valori assoluti, l'espressione:
A = 3 ⋅V ⋅ I
*
perché l'angolo di fase della tensione concatenata è altra cosa dall'angolo di fase della
tensione di fase.
Per passare ai valori relativi, occorre che siano preventivamente definiti almeno due tra i seguenti valori
nominali:
Vn ;
In;
An ; Z n
Solitamente si definiscono:
Vn _ i ;
An
cioè:
-
tensione nominale per ciascun nodo i-esimo del sistema; i nodi potranno così essere classificati in base
al valore della tensione nominale; si avranno quindi diversi livelli di tensione, tanti quanti i diversi valori
di Vn presenti nel sistema;
-
potenza nominale, solitamente unica per l'intero sistema
e da questi valori si ricavano di conseguenza:
An
3 ⋅ Vn _ i
-
a partire dalla [9.10]:
In _ i =
-
a partire dalla [9.2]:
Un _ i =
Vn _ i
-
inoltre:
Zn _ i =
Un _ i
[9.11]
[9.12]
3
In _ i
=
3 ⋅U n _ i ⋅U n _ i
3 ⋅U n _ i ⋅ I n _ i
=
3 ⋅ U n2 _ i
An
=
Vn2_ i
[9.13]
An
Quest'ultima espressione esprime l'impedenza nominale per ciascun livello di tensione del sistema. Il
concetto di impedenza nominale merita una breve riflessione che aiuta a comprenderne meglio il significato:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
-
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 5 di 80
quando un componente presenta un valore di impedenza pari all'impedenza nominale per il suo livello
di tensione, allora, nel caso il componente sia percorso da corrente pari a quella nominale, si ha sul
componente medesimo una differenza di tensione (tra estremo entrante ed uscente) pari alla tensione
nominale. Infatti, dalla [9.13]:
ΔEi = Z n _ i ⋅ I n _ i =
Un _ i
In _ i
⋅ In _ i = Un _ i
[9.14]
tale grandezza presenterà poi un dato valore di angolo di fase rispetto alla tensione applicata, per cui
potrebbe essere in fase con essa, oppure in opposizione, o in quadratura, o in ogni altro possibile
orientamento, in base ai valori degli angoli di fase della impedenza medesima e della corrente, per cui
la variazione del modulo non sarà pari alla tensione nominale, ma dipendarà da tale angolo.
Si supponga allora che per un dato componente, per esempio un generatore, siano definiti: tensione
nominale e potenza nominale (eventualmente pari alla potenza nominale dell'intero sistema); siano poi noti i
valori di tensione ai morsetti e di corrente erogata. Dalla [9.11] si ricava la corrente nominale, quindi si
calcolano i parametri in valori relativi:
U
V
; V& = ;
U& =
Un
Vn
I
I& = ;
In
[9.15]
Si noti anche che, in modulo:
3 V
=
= V&
3 Vn
U
V
U& =
=
U n Vn
[9.16]
La potenza erogata dal generatore vale allora:
A
3 ⋅ V ⋅ I ⋅ (cos ϕ + j sin ϕ) & &
A& =
=
= V ⋅ I ⋅ (cos ϕ + j sin ϕ ) = U& ⋅ I& ⋅ (cos ϕ + j sin ϕ )
An
3 ⋅ Vn ⋅ I n
Questo è un risultato importante: nel calcolo della potenza in valori relativi, il fattore
utilizzato.
[9.17]
3 non deve più essere
Anche sulla potenza e quindi sulla espressione [9.17] si può fare una breve riflessione che aiuti a
comprenderne meglio il significato:
-
quando un componente presenta un valore di tensione pari alla tensione nominale ( V& = 1 ⇔ V = Vn ) e
eroga (o assorbe) un valore di corrente pari alla corrente nominale ( I& = 1 ⇔ I = I n ), allora il
componente eroga (o assorbe) una potenza apparente pari alla potenza nominale ( A& = 1 ⇔ A = An ).
9.1.3 - Calcolo in p.u. in un sistema con diversi livelli di tensione.
Un esempio può chiarire meglio la comodità d'uso del calcolo in valori relativi e l'immediatezza
dell'informazione che tale metodo trasmette, soprattutto in sistemi con diversi livelli di tensione. Si consideri il
seguente:
Esempio n° 9.1
Nodo 1
Nodo 2
fig. 9.1
Un sistema elettrico trifase, schematizzato in fig. 9.1, è costituito da:
-
un nodo ("Nodo 1") con tensione nominale pari a 150 kV, tensione effettiva pari a 154.5 kV, e con alla
spalle un sistema elettrico, trasparente ai fini di questo esercizio, avente potenza di cortocircuito infinita;
questo significa che il nodo può fornire o assorbire qualunque valore di corrente senza subire variazioni
della tensione effettiva (come se alla sue spalle ci fosse un generatore ideale, privo di impedenza);
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 6 di 80
-
un trasformatore 150 kV / 15 kV, i cui morsetti AT coincidono con il nodo 150 kV suddetto, avente una
potenza nominale di 100 MVA, e una impedenza di cortocircuito pari a j0.180 Ω se misurata lato 15 kV
(resistenza degli avvolgimenti, corrente a vuoto e perdite nel ferro siano trascurabili in questo esempio);
-
un nodo ("Nodo 2") a 15 kV, coincidente ai morsetti MT del trasformatore suddetto
-
una impedenza shunt, collegata al nodo a 15 kV, di valore pari a 0.9+j2.7 Ω per fase (modello a stella).
Si calcoli:
a)
la corrente assorbita dall'impedenza;
b)
la tensione effettiva al nodo 15 kV.
Nel calcolo in valori assoluti si procede solitamente come segue:
1)
Tutte le impedenza vengono riportate al nodo di cui si conosce la tensione effettiva, cioè al nodo 150
kV:
2
j 0.180 Ω →
0.9 + j 2.7Ω →
2)
⎛ 150 ⎞
2
j 0.180 Ω ⋅ ⎜
⎟ = j 0.180 ⋅ 10 = j18.0 Ω
⎝ 15 ⎠
(0.9 + j 2.7Ω ) ⋅ ⎛⎜ 150 ⎞⎟
⎝ 15 ⎠
2
= (0.9 + j 2.7Ω ) ⋅10 2 = 90 + j 270Ω
Le due impedenze sono in serie, quindi si ha una impedenza complessiva verso terra pari a:
Z tot = j18 + 90 + j 270 = 90 + j 288Ω
2)
Si applica banalmente la legge di Ohm, considerando pari a 0 (riferimento) la fase della tensione nel
nodo in AT:
I AT =
3)
(
)
U
V 3 ⋅ e j 0 154.5 3
=
=
= 0.0882 − j 0.2822 kA
Z tot
Z tot
90 + j 288
Tale corrente viene riportata al lato MT del trasformatore, mediante il rapporto di trasformazione
nominale:
I MT =
150
⋅ I AT = 10 ⋅ I AT = 0.882 − j 2.822kA
15
che in modulo è pari a:
I MT = 0.882 − j 2.822 = 2.956 kA
4)
Si calcola la c.d.t. sul trasformatore, vista sempre nel riferimento in AT:
ΔU cc , rif _ AT = Z cc, rif _ AT ⋅ I AT = j18 ⋅ (0.0882 − j 0.2822) = 5.079 + j1.587 kV
per cui la tensione MT riportata al lato AT vale:
U MT , rif _ AT = U AT , rif _ AT − ΔU cc, rif _ AT = 154.5
3 − 5.079 − j1.587 =
= 89.201 − 5.079 − j1.587 = 84.122 − j1.587 kV
5)
Si riporta tale tensione al lato MT del trasformatore mediante il rapporto di trasformazione nominale, e
se ne calcola il modulo e il valore concatenato
U MT = U MT ,rif _ AT ⋅
15
= 8.4122 − j 0.158 kV
150
U MT = 8.41kV
VMT = 3 ⋅ U MT = 14.573 kV
Tutte le informazioni richieste sono state ottenute. Sorgono immediate due domande:
a)
con la corrente così calcolata, di quanto è carico il trasformatore? siamo sicuri che non sia in
sovraccarico?
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
b)
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 7 di 80
la tensione effettiva in MT è molto lontana dal valore nominale? siamo sicuri che il sistema MT non stia
funzionando a tensioni troppo basse (o troppo alte)?
Le risposte a queste due domande si ottengono mediante due banali calcoli:
I n _ MT =
An
100
=
= 3.849 kA
3 ⋅ Vn _ MT
3 ⋅ 15
I
I& = MT = 0.768 pu
I n _ MT
è la corrente nominale del trasformatore, lato MT
è la corrente in p.u. nel caso in esempio
quindi la corrente nel trasformatore è inferiore alla corrente nominale: la macchina è caricata all'incirca al
77%, quindi in condizioni di tutta sicurezza;
V
14.573
V& = MT =
= 0.972 p.u.
Vn _ MT
15
quindi il sistema MT funziona ad una tensione che è inferiore del 2.8% rispetto alla tensione nominale, quindi
ad una tensione non ottimale ma comunque accettabile (tipicamente i valori accettabili sono entro ±5% del
valore nominale).
Si risolverà ora il problema con calcolo in valori relativi.
1)
Per prima cosa verranno fissati i valori di riferimento:
Vn _ AT = 150 kV ; Vn _ MT = 15 kV
An = 100 MVA
In funzione di queste si hanno quindi le altre grandezze nominali:
I n _ AT =
Z n _ AT
2)
An
=
100
= 0.385 kA ; I n _ MT =
3 ⋅ Vn _ AT
3 ⋅ 150
2
2
Vn _ AT 150
=
=
= 225 Ω;
100
An
Z n _ MT
An
=
100
= 3.849 kA
3 ⋅ Vn _ MT
3 ⋅ 15
Vn2_ MT 15 2
=
=
= 2.25 Ω
100
An
Quindi tutte le grandezze note vengono riportate in valori relativi:
-
tensione del nodo in AT:
V ⋅ e j 0 154.5
=
= 1.030 p.u.
V& AT = AT
150
Vn _ AT
-
impedenza del trasformatore:
Z
j 0.180
Z& cc = cc ,MT =
= j 0.080 p.u.
Z n _ MT
2.25
-
impedenza shunt:
Z
0.9 + j 2.7
Z& shunt = shunt =
= 0.4 + j1.2 p.u.
Z n _ MT
2.25
Si noti che l'impedenza del trasformatore, come pure quella del ramo shunt, sono state calcolate in
valori relativi utilizzando i loro valori assoluti riferiti a 15 kV, e l'impedenza nominale per i componenti a
15 kV. Se il medesimo calcolo di valori relativi fosse stato fatto utilizzando i valori assoluti riferiti a 150
kV, questi sarebbero stati 100 volte maggiori; ma anche l'impedenza nominale sarebbe stata 100 volte
maggiore, quindi si sarebbero ottenuti i medesimi risultati in valori relativi. Per esempio per il
trasformatore:
Z
j18
Z& cc = cc , AT =
= j 0.080 p.u.
Z n _ AT 225
ed analogamente per l'impedenza shunt.
Quindi il circuito equivalente in valori relativi è costituito semplicemente da:
-
un nodo a tensione imposta (1.030 p.u.)
-
un'impedenza equivalente al trasformatore (j0.080 p.u.)
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
-
un nodo intermedio di tensione per ora incognita
-
un'impedenza shunt (0.4+1.2 p.u.)
p. 8 di 80
Si noti che questo ha permesso delle semplificazioni molto importanti:
3)
a)
i nodi non vengono più distinti per livello di tensione: per ciascuno di essi quello che conta è la
tensione in p.u., che in alcuni nodi è nota, in altri è da calcolare; l'informazione relativa alla
tensione nominale viene tenuta da parte e "recuperata" solo alla fine del processo di calcolo,
quando, ottenuti tutti i valori in p.u. desiderati, da questi si vuole tornare a quelli assoluti;
b)
come conseguenza di quanto al punto "a)" e del fatto che le impedenze di cortocircuito abbiano lo
stesso valore in p.u. sia che vengano calcolate al primario, sia che vengano calcolate al
secondario, i trasformatori non "esistono" più ma sono rimpiazzati da semplici impedenze (in p.u.,
ovviamente)
La soluzione del problema è quindi immediata:
V&
V& AT
1.030
1.030
I& = AT =
=
=
= 0.2291 − j 0.733 p.u.
&
&
&
j 0.08 + 0.40 + j1.20 0.40 + j1.28
Z tot Z cc + Z shunt
che in modulo diventa:
I& = 0.2291 − j 0.7331 = 0.76 p.u.
la tensione sul nodo intermedio in MT:
V& MT = V& AT − Z& cc ⋅ I& = 1.030 − j 0.080 ⋅ (0.2291 − j 0.7331) =
= 1.030 − 0.0586 − j 0.0183 = 0.9714 − j 0.0183 p.u.
che in modulo diventa:
V&MT = 0.9714 − j 0.0183 = 0.97 p.u.
Si può notare come il metodo in p.u., una volta che siano ben chiare alcune regole fondamentali, sia molto
più spiccio di quello in valori assoluti, ma altrettanto preciso.
Resta da fare una precisazione riguardo all'uso dei fasori, in p.u., della tensione concatenata piuttosto che
della tensione di fase. In tutti questi calcoli in valori relativi si sono utilizzati V& AT e V& MT , in equazioni che, se
espresse in valori fisici, avrebbero utilizzato fasori con angolo di fase pari a quello della tensione di fase
(quindi tipo U ) e non della tensione concatenata (per esempio, l'equazione per il calcolo della c.d.t. sul
trasformatore e quindi della tensione del nodo MT).
Già nel precedente paragrafo 9.1.2 - la formula [9.15] dimostrava che, in modulo, V& = U& .
Questa uguaglianza ha portato, nella prassi, ad una estensione impropria: è divenuta prassi comune
indicare con V& un fasore in p.u. il cui modulo indichi indifferentemente la tensione di fase o la concatenata
(in p.u. i valori in modulo sono, appunto, uguali), mentre l'angolo di fase sia quella della tensione di fase.
Quindi si è scritto V& ma in realtà si intende U& . Volutamente questo esempio è stato scritto con questa
simbologia errata, perché questa prassi è molto comune ed è quindi bene abituarsi in fretta a leggerla e a
comprenderla, non abituarsi mai ad utilizzarla.
9.1.4 - Cambiamento del riferimento di potenza nominale.
Nell'esempio 1.1 si è scelta come unica potenza di riferimento la potenza nominale del trasformatore. Per
ogni macchina elettrica è sempre definita (da parte del costruttore) una potenza nominale, basata sui limiti
termici: quando la macchina assorbe o trasmette la corrente nominale, funzionando alla tensione nominale,
la potenza dissipata per effetto Joule (perdite nel ferro, perdite negli avvolgimenti) è pari alla massima
potenza dissipabile senza superare un limite di temperatura che possa essere tenuto per un tempo indefinito
senza causare danno per sovratemperature (ai materiali isolanti in particolare).
Risulta quindi molto comodo esprimere i parametri di macchina in funzione dei valori nominali per essa
definiti dal costruttore.
Per i trasformatori l'impedenza di cortocircuito in p.u. è uno dei parametri più significativi. Nell'esempio
precedente, impedenza di cortocircuito pari a j0.080 p.u. significa semplicemente che: quando nella
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 9 di 80
macchina transita la corrente nominale, la caduta di tensione tra i due morsetti è pari a 0.080 volte la
tensione nominale (occorre poi conoscere la fase di questa variazione, per sapere quale sia l'effetto di tale
c.d.t. sui moduli); come pure significa che quando la macchina funziona in cortocircuito (primario alimentato,
secondario in cortocircuito o viceversa) basterà applicare una tensione in p.u. pari all'impedenza di
cortocircuito per avere una corrente pari a quella nominale. Infatti:
U&
I& =
=
Z& cc
V&
Z& cc
[9.18]
e quindi per avere 1 p.u. al 1° membro occorre che al 2° membro numeratore e denominatore siano uguali.
Questa informazione è quindi molto più significativa; l'impedenza di cortocircuito è più comoda se espressa
in p.u. che non se espressa in Ω. Infatti i costruttori riportano sulla targa quasi sempre il valore in p.u. (o
meglio in %, vale a dire moltiplicando per 100 il valore in p.u.).
Quando però nel sistema oggetto dello studio sono presenti più macchine, ciascuna con una potenza di
targa in generale diversa, le cose si fanno più complicate. Infatti, per poter facilmente svolgere i calcoli
occorre che tutte le impedenze siano espresse nel p.u. di una medesima potenza nominale. Occorre allora
imparare a riportate le impedenza in p.u. da una riferimento ad un'altro. Questa operazione è molto facile.
Si supponga che il costruttore fornisca per un trasformatore i seguenti dati di targa:
Vn1 = 150 kV; Vn 2 = 20 kV ;
An = 40 MVA;
zcc = 12.5%
dove l'ultimo grandezza è stampigliata sulla targa in lettere minuscole per indicare che non è in valori
assoluti, ma in % delle grandezze di macchina.
Si supponga poi che per l'intero sistema si scelga come potenza di riferimento:
Abase = 100 MVA .
Con alcuni passaggi intermedi:
Z n, 20 kV =
Vn22 20 2 400
=
=
= 10Ω
40
40
An
Z base, 20 kV =
20 2 400
Vn22
=
=
= 4Ω
Abase 100 100
l'impedenza di cortocircuito del trasformatore, in valori assoluti e riferita a 20 kV, vale quindi:
Z cc, Ω, 20kV = Z& cc, pu _ trasf ⋅ Z n , 20kV = 0.125 ⋅10 = 1.250 Ω
riportando tale impedenza dai valori assoluti ai valori relativi nel sistema di riferimento generale:
Z
1.250
= 0.315 Ω
Z& cc , pu _ base = cc , Ω, 20 kV =
4
Z base , 20 kV
Sintetizzando i calcoli eseguiti, partendo dalla fine:
Z
Z
Z& cc , pu _ base = cc , Ω, 20 kV = n , 20 kV ⋅ Z& cc , pu _ trasf
Z base , 20 kV Z base , 20 kV
[9.19]
e quindi:
Z
V2 A
A
Z& cc , pu _ base = Z& cc , pu _ trasf ⋅ n , 20 kV = Z& cc , pu _ trasf ⋅ 2n 2 n = Z& cc , pu _ trasf ⋅ base
Z base , 20 kV
An
Vn 2 Abase
[9.20]
Quindi: per passare da un riferimento all'altro basta moltiplicare per il rapporto delle potenze nominali.
Analogamente per le correnti:
(
)
I& pu _ trasf ⋅ An 3 ⋅ Vn 2
A
I& pu _ base =
= I& pu _ trasf ⋅ n
Abase
Abase 3 ⋅ Vn 2
Versione 1.00 - novembre 2010
[9.21]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 10 di 80
Esempio n° 9.2
Nodo AT
Nodo MT
Nodo
BT 1
Nodo
BT 2
Nodo
BT 3
Nodo di terra
fig. 9.2
Un sistema elettrico trifase, come da fig. 9.2, è costituito da:
-
un nodo ("Nodo AT") con tensione nominale pari a 150 kV, tensione effettiva pari a 156 kV, e con alla
spalle un sistema elettrico, trasparente ai fini di questo esercizio, avente potenza di cortocircuito infinita;
questo significa che il nodo può fornire o assorbire qualunque valore di corrente senza subire variazioni
della tensione effettiva (come se alla sue spalle ci fosse un generatore ideale, privo di impedenza);
-
un trasformatore 150 kV / 10 kV, i cui morsetti AT coincidano con il nodo 150 kV suddetto, avente una
potenza nominale di 10.5 MVA, e una impedenza di cortocircuito pari al 9% (per semplicità, interamente
reattiva);
-
un nodo ("Nodo MT") a 10 kV, coincidente ai morsetti MT del trasformatore suddetto
-
tre trasformatori 10 kV / 0.4 kV, i cui morsetti MT coincidano con il nodo 10 kV suddetto, aventi ciascuno
una potenza nominale di 0.63 MVA, e una impedenza di cortocircuito pari al 4.5% (per semplicità,
interamente reattiva);
-
tre nodi BT ("Nodo BT 1/2/3") a 0.4 kV, coincidenti con i morsetti BT dei tre trasformatori suddetti;
-
in ogni nodo BT una impedenza shunt, di valore pari a: 1.2+j0.9 Ω per il primo nodo; 0.8+j0.6 Ω per il
secondo nodo; 0.4+j0.3 Ω per il terzo nodo.
Si calcoli:
a)
la tensione del nodo MT e dei tre nodi BT;
b)
la percentuale di carico dei 4 trasformatori.
In questo caso può essere opportuno scegliere come potenza di riferimento per l'intera rete quella del
trasformatore maggiore:
Abase = 10.5 MVA
Quindi, in tale sistema di riferimento:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 11 di 80
Z& cc , ATMT = j 0.0 p.u.
A
10.5
Z& cc ,MTBT = j 0.045 ⋅ base = j 0.045 ⋅
= j 0.75 p.u.
AnMTBT
0.63
L'impedenza base per il livello di tensione 0.4 kV vale:
Z base , BT =
0 .4 2 0 .4 2
=
= 0.015238Ω
Abase 10.5
e quindi le tre impedenze shunt in BT, riportate nel p.u. generale, valgono:
1.2 + j 0.9
Z& shunt1 =
= 78.75 + j 59.0625 p.u.
Z base,BT
0.8 + j 0.6
Z& shunt 2 =
= 52.50 + j 39.3750 p.u.
Z base,BT
0.4 + j 0.3
Z& shunt 3 =
= 26.25 + j19.6875 p.u.
Z base,BT
Ciascuna di queste impedenze va messa in serie con l'impedenza del relativo trasformatore MT/BT e le tre
impedenze così ottenute vanno messe in parallelo; il valore così ottenuto andrà messo in serie con
l'impedenza del trasformatore AT/MT:
Z& cc ,MTBT + Z& shunt1 = 78.75 + j 59.8125 p.u.
Z& cc ,MTBT + Z& shunt 2 = 52.50 + j 40.1250 p.u.
Z& cc ,MTBT + Z& shunt 3 = 26.25 + j 20.4375 p.u.
(Z&
ccMTBT
) (
)(
)
+ Z& shunt 1 || Z& ccMTBT + Z& shunt 2 || Z& ccMTBT + Z& shunt 3 = 14.3188 + j11.0419 p.u.
Questo calcolo risulta agevole trasformando ogni impedenza in ammettenza, sommando le ammettenze, e
quindi trasformando l'ammettenza risultante in impedenza:
(
−1
−1
−1
Z& parallelo = Z& 1 + Z& 2 + Z& 3
Infine:
)
−1
(formula generale)
((
Z& tot = Z& cc, ATMT + Z& ccMTBT + Z& shunt1
) + (Z&
−1
ccMTBT
+ Z& shunt 2
) + (Z&
−1
ccMTBT
+ Z& shunt 3
)
)
−1 −1
=
= j 0.09 + 14.3188 + j11.0419 = 14.3188 + j11.1319 p.u.
La tensione del nodo AT:
156 j 0
U& AT = V& AT =
⋅ e = 1.040 p.u.
150
Quindi la corrente assorbita dal trasformatore AT/MT:
U&
1.040
I& ATMT = & AT =
= 0.045270 − j 0.035195 p.u.
Z tot 14.3188 + j11.1319
che in modulo risulta:
I&ATMT = 0.045270 − j 0.035195 = 0.0573 p.u.
quindi il trasformatore AT/MT è carico in misura molto piccola, 5.73%.
La tensione del nodo MT si ottiene come sempre dalla c.d.t.:
U& MT = U& AT − Z& cc, ATMT ⋅ I& ATMT = 1.040 − j 0.09 ⋅ (0.045270 − j 0.035195) = 1.0368 − j 0.0041 p.u.
che in modulo risulta:
V&MT = U& MT = 1.0368 − j 0.0041 = 1.0368 p.u.
Versione 1.00 - novembre 2010
pari a 10. 368 kV
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 12 di 80
Con il valore della tensione MT in p.u. è immediato calcolare le correnti nei tre rami BT. Per esempio per il
primo:
I& MTBT ,1 =
U& MT
1.0368 − j 0.0041
=
= 0.008325 − j 0.006374 p.u.
Z& cc ,MTBT + Z& shunt1 78.75 + j 59.8125
pari in modulo a:
I&MTBT ,1 = 0.008325 − j 0.006374 = 0.010485 p.u.
Questa corrente è espressa in p.u. di 10.5 MVA; occorre esprimerla in p.u. di 0.63 MVA (potenza nominale
del trasformatore MT/BT) per vedere quanto sia carico tale trasformatore:
10.5
10.5
I&MTBT ,1, pu _ 0.63 = I&MTBT ,1, pu _ 10.5 ⋅
= 0.010485 ⋅
= 0.174 p.u.
0.63
0.63
La tensione del nodo BT su tale ramo vale:
U& BT ,1 = U& MT − Z& cc ,MTBT ⋅ I& MTBT ,1 = 1.0368 − j 0.0041 − j 0.75 ⋅ (0.008325 − j 0.006374 ) =
= 1.0321 − j 0.0103 p.u.
che in modulo è pari a:
V&BT ,1 = U& BT ,1 = 1.0321 − j 0.0103 = 1.0321 p.u.
pari a
0. 413 kV
Analogamente per gli altri due rami BT
9.1.5 - [Approfondimento] Trasformatori con tensioni fuori nominale
Questo sottocapitolo è un approfondimento e non un argomento obbligatorio nella preparazione dell'esame.
Se ne consiglia lo studio a chi ha passione per la materia. Può essere l'argomento di una domanda
facoltativa per il raggiungimento di un voto molto alto (lode).
Nei sistemi elettrici la tensione nominale dei nodi e delle linee viene fissata, in base alle esigenze funzionali
di quella parte del sistema, ponendola pari, solitamente, al valore standard più vicino alle esigenze suddette.
La scelta di valori standard (0.38 o 0.40 kV, 6 kV, 15 kV, 20 kV, 30 kV, 132 o 150 kV, etc.) rende più agevole
il reperimento sul mercato dei componenti necessari.
Tra tutti i componenti elettrici, tuttavia, i trasformatori sono quelli che ancora oggi vengono costruiti, più di
tutti gli altri, "su misura", in base alle richieste del cliente; e le esigenze costruttive - soprattutto il fatto che il
numero di spire per ogni avvolgimento non possa essere scelto del tutto a piacere, ma debba rispettare
alcuni vincoli geometrici - rende frequente il fatto che le tensioni nominali della macchina non siano
perfettamente coincidenti con le tensioni nominali dei nodi a cui essa viene collegata.
In tali casi si dice che il trasformatore presenta tensioni "fuori nominale".
Questo rende meno agevole il calcolo in p.u.. Si consideri per esempio un trasformatore 132 kV /16 kV posto
in un sistema con tensioni nominali di 132 kV e 15 kV rispettivamente. Se il trasformatore è funzionante a
vuoto ed è alimentato lato AT con tensione effettiva pari a quella nominale - quindi pari a 1.000 p.u. - al lato
MT la tensione effettiva vale 16 kV (nessuna c.d.t. perché a vuoto), ma tale valore non è pari a 1.000 p.u. nel
sistema a 15 kV, bensì a 16/15=1.067 p.u..
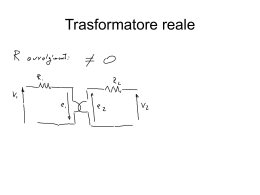
Il trasformatore fuori nominale richiede quindi un modello più sofisticato nel calcolo in valori relativi.
Solitamente un trasformatore reale, descritto in valori assoluti, viene modellizzato mediante un circuito
equivalente a T in serie con un trasformatore ideale. I 3 parametri del modello a T sono: le impedenze di
cortocircuito relative all'avvolgimento primario e secondario ("bracci" della T) e l'ammettenza di
magnetizzazione, inclusa la conduttanza che esprime le perdite nel ferro (ramo derivato). Questo modello
richiede la conoscenza della suddivisione tra primario e secondario dell'impedenza di cortocircuito, e questa
informazione, ammesso che sia fisicamente definibile, è raramente nota.
Così, frequentemente, e per semplicità, si ricorre ad un modello a Γ (con a valle sempre il trasformatore
ideale), dove il ramo derivato viene posto sull'uno o sull'altro estremo, togliendo così il nodo intermedio
sull'impedenza di cortocircuito. Questo modello comporta quindi una approssimazione.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 13 di 80
Un circuito equivalente più preciso (anche se comunque non perfetto) è invece un modello a Π (sempre con
a valle il trasformatore ideale), dove il ramo derivato viene suddiviso in due parti (solitamente uguali), una
per ciascun estremo.
Per poter affrontare meglio il problema, è opportuno dapprima richiamare brevemente la teoria dei quadripoli
e dei modelli equivalenti a Π.
Un circuito equivalente a Π di un quadripolo reale, in generale (e quindi tralasciando per un momento il caso
specifico del trasformatore reale, dunque senza considerare il trasformatore ideale posto in cascata al
circuito a Π) è caratterizzato da 3 parametri:
I2
I1
ZL
U2
Y01
Y02
U1
fig. 9.3
-
impedenza longitudinale, Z L
-
ammettenza derivata al 1° estremo, Y 01
-
ammettenza derivata al 2° estremo, Y 02
Indicando con U 1 ,I 1 tensione (di fase) e corrente ai morsetti del lato 1 e con U 2 , I 2 tensione (di fase) e
corrente ai morsetti del lato 2, utilizzando per il lato 1 la convezione degli utilizzatori e per il lato 2 la
convenzione dei generatori, possono essere definite le seguenti equazioni di funzionamento:
I 12 =
U1 −U 2
ZL
I 01 = Y 01 ⋅ U 1
I 02 = Y 02 ⋅ U 2
corrente nel ramo longitudinale, da 1 a 2
[9.22]
corrente rispettivamente nel 1° e 2° ramo derivato
[9.23]
applicando la legge di Kirchhoff ai nodi si ha che:
I 1 = I 12 + I 01
I 2 = I 12 − I 02
[9.24]
da cui:
I 12 = I 2 + I 02 = I 2 + Y 02 ⋅ U 2
I 1 = I 12 + I 01 = I 2 + I 02 + I 01 = I 2 + Y 02 ⋅ U 2 + Y 01 ⋅ U 1
[9.25]
quindi:
U 1 = U 2 + Z L ⋅ I 12 = U 2 + Z L ⋅ (I 2 + I 02 ) = U 2 + Z L ⋅ I 2 + Z L ⋅ Y 02 ⋅ U 2
[9.26]
I 1 = I 2 + Y 02 ⋅ U 2 + Y 01 ⋅ U 1 = I 2 + Y 02 ⋅ U 2 + Y 01 ⋅ (U 2 + Z L ⋅ I 2 + Z L ⋅ Y 02 ⋅ U 2 )
che in sintesi diventa:
U 1 = (1 + Z L ⋅ Y 02 ) ⋅ U 2 + Z L ⋅ I 2
I 1 = (Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 ) ⋅ U 2 + (1 + Y 01 ⋅ Z L ) ⋅ I 2
[9.27]
Questo può essere espresso anche in forma matriciale:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
ZL
1 + Z L ⋅ Y 02
⎡U 1 ⎤ ⎡
⎤ ⎡U 2 ⎤
⎢ I ⎥ = ⎢Y + Y ⋅ Z ⋅ Y + Y
⎥⋅⎢ ⎥
L
01
02
02 1 + Y 01 ⋅ Z L ⎦ ⎣ I 2 ⎦
⎣ 1 ⎦ ⎣ 01
p. 14 di 80
[9.28]
Indicando come [T ]12 tale matrice, e in generale come [T ] ij la matrici relativa ad un generico quadripolo
avente come estremi i nodi i e j , nel caso di più quadripoli in cascata si può scrivere:
[T ]1n = [T ]12 ⋅ [T ] 23 ⋅ K ⋅ [T ] n−1,n
[9.29]
Tornando al caso del trasformatore reale, si definiscano:
Vb1 ,Vb 2 ;U b1 ,U b 2
tensioni nominali (concatenate e di fase) dei nodi estremi del trasformatore
Vn1 ,Vn 2U n1 ,U n 2
tensioni nominali (concatenate e di fase) di macchina (da cui il rapporto spire)
Ab = An
potenza di riferimento del sistema, per comodità presa pari alla potenza nominale del
trasformatore (i cambiamenti della potenza di riferimento sono operazioni semplici,
descritte nel precedente par. 9.1.4 -)
Si definiscano pure:
m1 =
Vn1 U n1
=
;
Vb1 U b1
m2 =
Vn 2 U n 2
=
;
Vb 2 U b 2
N=
Vn1 U n1
=
Vn 2 U n 2
[9.30]
Siano poi:
U 1, I 1
tensione e corrente in valori assoluti (kV, kA) al primario, con la convenzione degli utilizzatori;
U 2 ,I 2
tensione e corrente in valori assoluti (kV, kA) al secondario, con la convenzione dei generatori.
Si supponga poi che parametri di macchina in valori assoluti siano definiti al lato primario (se fossero al
secondario il procedimento sarebbe analogo e il risultato finale non cambierebbe); siano allora:
(1)
(1)
(1)
Z L ;Y 01 ;Y 02
tali parametri, con l'apice "(1)" che indica che sono riportati al primario;
U ′2 ,I ′2
tensione e corrente in valori assoluti (kV, kA) del lato secondario, sempre con la convenzione
dei generatori, ma riportate al primario mediante il rapporto di trasformazione, per cui:
U ′2 = N ⋅ U 2
I ′2 = I 2 N
[9.31]
vale a dire:
0 ⎤ ⎡U 2 ⎤
⎡U ′2 ⎤ ⎡ N
⎢ I′ ⎥ = ⎢
⎥⋅⎢ ⎥
⎣ 2 ⎦ ⎣ 0 1 N⎦ ⎣ I2 ⎦
[9.32]
Utilizzando i parametri di macchina visti dal primario si può scrivere:
(1)
(1)
(1)
⎤ ⎡U ′2 ⎤
⎡U 1 ⎤ ⎡
1 + Z L ⋅ Y 02
ZL
=
⋅
⎢ I ⎥ ⎢ (1)
⎥
(1)
(1)
(1)
(1)
(1)
(1) ⎥ ⎢
⎣ 1 ⎦ ⎣⎢Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 1 + Y 01 ⋅ Z L ⎦⎥ ⎣ I ′2 ⎦
[9.33]
e quindi mettendo in cascata come da [9.29] il quadripolo relativo ai parametri fisici e il quadripolo relativo al
trasformatore ideale si ottiene:
(1)
(1)
(1)
⎤ ⎡N
0 ⎤ ⎡U 2 ⎤
⎡U 1 ⎤ ⎡
1 + Z L ⋅ Y 02
ZL
=
⋅
⎢ I ⎥ ⎢ (1)
⎥⋅⎢ ⎥
(1)
(1)
(1)
(1)
(1)
(1) ⎥ ⎢
⎣ 1 ⎦ ⎢⎣Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 1 + Y 01 ⋅ Z L ⎥⎦ ⎣ 0 1 N ⎦ ⎣ I 2 ⎦
[9.34]
e quindi, eseguendo il prodotto matriciale:
(1)
(1)
(1)
⎤ ⎡U 2 ⎤
⎡U 1 ⎤ ⎡
N + N ⋅ Z L ⋅ Y 02
ZL N
⎥⋅⎢ ⎥
⎢I ⎥=⎢
(1)
(1)
(1)
(1)
(1)
(1)
(1)
⎣ 1 ⎦ ⎢⎣ N ⋅ Y 01 + N ⋅ Y 01 ⋅ Z L ⋅ Y 02 + N ⋅ Y 02 1 N + Y 01 ⋅ Z L N ⎥⎦ ⎣ I 2 ⎦
[9.35]
Si passi ora ai valori relativi, riferiti alla tensione nominale dei nodi:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
U 1 = U& 1 ⋅ U1b ;I 1 = I&1 ⋅ I1b = I&1 ⋅ Ab (3 ⋅ U1b )
U 2 = U& 2 ⋅ U 2b ;I 2 = I& 2 ⋅ I 2b = I& 2 ⋅ Ab (3 ⋅ U 2b )
p. 15 di 80
[9.36]
allora il sistema di equazioni diventa:
(1)
(1)
(1)
⎤ ⎡ U& 2 ⋅ U 2b ⎤
⎡ U& 1 ⋅ U1b ⎤ ⎡
N + N ⋅ Z L ⋅ Y 02
ZL N
=
⎥⋅⎢&
⎢&
⎥ ⎢
⎥
(1)
(1)
(1)
(1)
(1)
(1)
(1)
⎣ I1 Ab (3U1b )⎦ ⎢⎣ N ⋅ Y 01 + N ⋅ Y 01 ⋅ Z L ⋅ Y 02 + N ⋅ Y 02 1 N + Y 10 ⋅ Z L N ⎥⎦ ⎣ I 2 Ab (3U 2b )⎦
[9.37]
Tornando ad esprimere le due equazioni in forma sistemica ma non matriciale, e moltiplicando primo e
secondo membro della prima equazione per 1 E1b e primo e secondo membro della seconda equazione per
3 ⋅ E1b Ab , si ottiene quindi:
(
)
U
1
Ab
(1) (1)
(1)
U& 1 = N ⋅ b 2 ⋅ 1 + Z L ⋅ Y 02 ⋅ U& 2 + ⋅
⋅ Z L ⋅ I& 2
U b1
N U b1 ⋅ 3 ⋅ U b 2
U
Ab &
3
3 ⋅ U b1 1
⋅
(
)
(
)
(
)
(
)
(1)
(1) (1)
1
1
1
1
b1
I&1 =
I2
⋅ N ⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 ⋅ U 2b ⋅ U& 2 +
⋅ ⋅ 1 + Y 01 ⋅ Z L ⋅
Ab
Ab N
3 ⋅U b 2
(
)
(
[9.38]
)
Ricordando la [9.30]:
N=
Vn1 U n1
=
Vn 2 U n 2
e sostituendo tale espressione nelle equazioni precedenti, si ottiene:
(
)
U U
U
Ab
(1) (1)
(1)
U& 1 = n1 ⋅ b 2 ⋅ 1 + Z L ⋅ Y 02 ⋅ U& 2 + n 2 ⋅
⋅ Z L ⋅ I& 2
U n 2 U b1
U n1 U b1 ⋅ 3 ⋅ U b 2
U
U
U
Ab U n 2
3
3 ⋅ U b1
⋅
⋅
(
)
(
)
(
(1)
(1)
(1) (1)
1
1
1)
b1
b2
I&1 =
⋅ n1 ⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 ⋅ U& 2 +
⋅
⋅
⋅ 1 + Y 01 ⋅ Z L ⋅ I& 2
Ab
U n2
Ab 3 ⋅ U b 2 U n1
(
)
(
)
[9.39]
o, in forma matriciale:
(
)
U n1 U b 2
(1) (1)
⎡U& 1 ⎤ ⎡
⋅
⋅ 1 + Z L ⋅ Y 02
⎢
⎢ ⎥
U n 2 U b1
⎢ ⎥ = ⎢ 3 ⋅U ⋅U
(1)
(1)
(1) (1)
(1)
b1
b 2 U n1
⋅
⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02
⎢ I&1 ⎥ ⎢
⎢
⎣ ⎦ ⎣
Ab
U n2
(
)
U n2
Ab
(1)
⋅
⋅ZL
U n1 U b1 ⋅ 3 ⋅ U b 2
U b1 U n 2
(1)
(1)
⋅
⋅ 1 + Y 01 ⋅ Z L
U b 2 U n1
(
⎤ ⎡U& ⎤
⎥ ⎢ 2⎥
⎥⋅⎢ ⎥
⎥ ⎢& ⎥
⎥⎦ ⎣ I 2 ⎦
)
[9.40]
Ora i 4 coefficienti che appaiono nel sistema di equazioni [9.40] vengono considerati ad uno ad uno; si
ricorda anche [9.30]
m1 =
Vn1 U n1
=
;
Vb1 U b1
Coeff. 1.1
m2 =
Vn 2 U n 2
=
Vb 2 U b 2
(
)
U n1 U 2b
(1) (1)
⋅
⋅ 1 + Z L ⋅ Y 02 ;
U n 2 U1b
(
si moltiplica tale coefficiente per
Z b1
1
=
:
Z b1 Z b1 ⋅ Yb1
)
⎛Z
(1) Z
(1) ⎞
⋅ ⎜⎜ b1 + Z L ⋅ b1 ⋅ Y 02 ⎟⎟ =
Z b1
⎝ Z b1
⎠
(1)
(1)
(1)
m ⎛ Z
Z Y ⎞ m
(1) ⎞ m ⎛
= 1 ⋅ ⎜⎜1 + L ⋅ Z b1 ⋅ Y 02 ⎟⎟ = 1 ⋅ ⎜⎜1 + L ⋅ 02 ⎟⎟ = 1 ⋅ 1 + Z& cc ⋅ Y& d 2
m2 ⎝
Z b1
Z b1 Yb1 ⎠ m2
⎠ m2 ⎝
U n1 U b 2 Z b1
U
(1) (1) U
⋅
⋅
⋅ 1 + Z L ⋅ Y 02 = n1 ⋅ b 2
U n 2 U b1 Z b1
U b1 U n 2
(
)
dove:
-
Z& cc è l'impedenza di cortocircuito, in p.u. di macchina
-
Y& d 2 è l'ammettenza derivata verso terra al 1° estremo, in p.u. di macchina
Solitamente Y& d 2 = Y& 0 2 , dove Y& 0 è l'ammettenza di magnetizzazione
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Coeff. 1.2:
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 16 di 80
U
U n2
Ab
(1)
⋅
⋅ Z L ; si moltiplica tale coefficiente per n1 :
U n1 3 ⋅ U b1 ⋅ U b 2
U n1
(1)
U n2
Ab
U
Ab
Z
(1) U
(1)
⋅
⋅ Z L = n 2 ⋅ n1 ⋅
⋅ Z L = m1 ⋅ m2 ⋅ L = m1 ⋅ m2 ⋅ Z& cc
U n1 3 ⋅ U b1 ⋅ U b 2
U b 2 U b1 3 ⋅ U n1 ⋅ U n1
Z b1
Coeff. 2.1:
(
)
U
3 ⋅ U b1 ⋅ U b 2 U n1
(1)
(1)
(1) (1)
(1)
⋅
⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 ; si moltiplica tale coeff. per n1 :
U n1
Ab
U n2
(
)
3 ⋅ U n1 ⋅ U n1 U b1 U b 2
(1)
(1)
(1) (1)
(1)
⋅
⋅
⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 =
Ab
U n1 U n 2
Coeff. 2.2:
(
)
=
1
(1)
(1)
(1) (1)
(1)
⋅ Z b1 ⋅ Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02 =
m1 ⋅ m2
=
1
1 ⎛ (1)
1
1
(1)
(1)
(1)
(1) ⎞
⋅ Y& d 1 + Y& d 1 ⋅ Z& cc ⋅ Y& d 2 + Y& d 2
⋅
⋅ ⎜⎜ Y 01 + Y 01 ⋅ Z L ⋅
⋅ Y 02 + Y 02 ⎟⎟ =
m1 ⋅ m2 Yb1 ⎝
Z b1 ⋅ Yb1
m
⋅
m
1
2
⎠
(
(
)
(
)
U b1 U n 2
(1) (1)
⋅
⋅ 1 + Y 01 ⋅ Z L ;
U b 2 U n1
si moltiplica tale coefficiente per
U U
U b1 U n 2
(1) (1)
⋅
⋅ 1 + Y 01 ⋅ Z L = b1 ⋅ n 2
U n1 U b 2
U b 2 U n1
Z b1
1
=
:
Z b1 Z b1 ⋅ Yb1
⎛ Y (1) Z (1) ⎞ m
⋅ ⎜⎜1 + 01 ⋅ L ⎟⎟ = 2 ⋅ 1 + Y& d 1 ⋅ Z& cc
Yb1 Z b1 ⎠ m1
⎝
(
)
)
dove:
Y& d 1 è l'ammettenza derivata verso terra al 1° estremo, in p.u. di macchina
-
Solitamente Y& d 1 = Y& 0 2 , dove Y& 0 è l'ammettenza di magnetizzazione
Il sistema [9.40] assume quindi ora una forma più semplice:
⎡
m1
⎡U& 1 ⎤ ⎢
⋅ 1 + Z& cc ⋅ Y& d 2
⎢ ⎥ ⎢
m2
⎢ ⎥ = ⎢ Y& + Y& ⋅ Z& ⋅ Y& + Y&
d1
cc
d2
d2
⎢ I&1 ⎥ ⎢ d 1
⎣ ⎦
⋅
m
m
1
2
⎣
(
)
m1 ⋅ m2 ⋅ Z& cc
(
m2
⋅ 1 + Y& d 1 ⋅ Z& cc
m1
⎤ &
⎥ ⎡U 2 ⎤
⎥⋅⎢ ⎥
⎥ ⎢& ⎥
⎥ ⎢⎣ I 2 ⎥⎦
⎦
[9.41]
)
Tale sistema dovrebbe essere espresso nella forma più semplice e generale per i quadripoli, come da
espressione [9.28] ma utilizzando tutte grandezze in p.u.:
⎡U& 1 ⎤ ⎡
1 + Z& L ⋅ Y& 02
⎢ & ⎥=⎢&
&
& &
&
⎣ I 1 ⎦ ⎣Y 01 + Y 01 ⋅ Z L ⋅ Y 02 + Y 02
⎤ ⎡U& 2 ⎤
⎥⋅⎢ & ⎥
⎦ ⎣I2 ⎦
Z& L
1 + Y& 01 ⋅ Z& L
[9.42]
quindi, eguagliando ad uno ad uno i coefficienti dei due sistemi [9.41] e [9.42], si possono trovare le
espressioni di Z& L , Y& 01 , Y& 02 in funzione dei parametri di targa del trasformatore: Z& cc ,Y& 0 .
Dal coefficiente 1.2 si ricava immediatamente:
1 + Y& 01 ⋅ Z& L =
Dal coefficiente 2.2:
(
Z& L = m1 ⋅ m2 ⋅ Z& cc
m2
⋅ 1 + Y& d 1 ⋅ Z& cc
m1
)
da cui:
⎞ 1 ⎛ m2
⎞
m
1 ⎛ m2
Y& 01 =
⋅ ⎜⎜
⋅ 1 + Y& d 1 ⋅ Z& cc − 1⎟⎟ =
⋅ ⎜⎜
− 1 + 2 ⋅ Y& d 1 ⋅ Z& cc ⎟⎟ =
&
&
Z L ⎝ m1
m1
⎠ Z L ⎝ m1
⎠
m − m1 1
1 m2 − m1 m2 Y& d 1 ⋅ Z& cc
1 m2 − m1 m2 Y& d 1 ⋅ Z& cc
1
=
⋅
+
⋅
=
⋅
+
⋅
= 2
⋅
+ 2 ⋅ Y& d 1
&
&
&
&
&
ZL
m1
m1
ZL
ZL
m1
m1 m1 ⋅ m2 ⋅ Z cc
m1
Z L m1
(
)
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
(
1C - Introduzione agli Impianti Elettrici
m
1 + Y& 02 ⋅ Z& L = 1 ⋅ 1 + Y& d 2 ⋅ Z& cc
m2
Dal coefficiente 1.1:
)
p. 17 di 80
da cui:
⎞ 1 ⎛ m1
⎞
m
1 ⎛ m1
Y& 02 =
⋅ ⎜⎜
⋅ 1 + Y& d 2 ⋅ Z& cc − 1⎟⎟ =
⋅ ⎜⎜
− 1 + 1 ⋅ Y& d 2 ⋅ Z& cc ⎟⎟ =
&
&
Z L ⎝ m2
m2
⎠ Z L ⎝ m2
⎠
&
&
&
&
m − m2 1
1 m1 − m2 m1 Y d 2 ⋅ Z cc
1 m1 − m2 m1 Y d 2 ⋅ Z cc
1
=
⋅
+
⋅
=
⋅
+
⋅
= 1
⋅
+ 2 ⋅ Y& d 2
&
&
&
&
&
ZL
m2
m2
ZL
ZL
m2
m2 m1 ⋅ m2 ⋅ Z cc
m2
Z L m2
(
)
In sintesi:
Z& L = m1 ⋅ m2 ⋅ Z& cc
m − m1 1
1
Y& 01 = 2
⋅
+ 2 ⋅ Y& d 1
&
m1
Z L m1
m
−
m
1
1
2
Y& 02 = 1
⋅
+ 2 ⋅ Y& d 2
m2
Z& L m2
[9.43]
La congruenza anche del coefficiente 2.1 è facilmente dimostrabile, ma non viene qui riportata per brevità.
Nonostante la dimostrazione lunga e laboriosa, le formule [9.43] ottenute sono abbastanza semplici. Si noti
che:
a)
l'impedenza di cortocircuito in p.u. di sistema Z& L viene moltiplicata, rispetto al valore in p.u. di
macchina Z& cc , per i coefficienti m1 , m2 che esprimono il rapporto fuori nominale; se le tensioni nominali
del trasformatore sono pari a quelle dei nodi del sistema, i due coefficienti sono entrambi unitari e quindi
l'impedenza di cortocircuito del circuito equivalente nel p.u. di sistema è pari all'impedenza di
cortocircuito nel p.u. di macchina;
b)
le ammettenze derivate verso terra in p.u. di sistema Y& 01 ,Y& 02 sono date da due termini:
i)
un termine è il valore della medesima ammettenza nel p.u. di macchina (a sua volta pari,
solitamente, alla metà dell'ammettenza di magnetizzazione in p.u. di macchina), ma moltiplicato
per un coefficiente correttivo 1 m12 al 1° estremo o 1 m22 al 2° estremo, coefficienti che di fatto
attuano il passaggio a una diversa della tensione di riferimento
ii)
l'altro è un termine aggiuntivo, pari a:
(m ⋅ Z& ) al 1° estremo
(m − m ) (m ⋅ Z& ) al 2° estremo;
(m2 − m1 )
1
2
1
L
2
L
oppure pari a
si noti che nel caso in cui le tensioni nominali del trasformatore sono pari a quelle dei nodi del
sistema, i due coefficienti m1 , m2 sono entrambi unitari e quindi questo termine aggiuntivo è nullo;
viceversa se almeno uno dei coefficienti è diverso da uno (cioè se almeno una tensione è fuori
nominale), allora se m1 > m2 si ha che il termine aggiuntivo nel 1° estremo corrisponde ad una
ulteriore ammettenza capacitiva e quello nel 2° estremo corrisponde ad una ulteriore ammettenza
induttiva; viceversa se m2 > m1 . Quindi si ha un ramo aggiuntivo capacitivo sull'estremo dove è più
alto il rapporto tra tensione nominale di macchina e tensione nominale di sistema, induttivo
sull'altro.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 18 di 80
Esempio n° 9.3
Nodo AT
Nodo MT
fig. 9.4
Un sistema elettrico trifase, come da fig. 9.4, è costituito da un nodo AT con Vn=132 kV di potenza infinita e
da un nodo MT con Vn=20 kV; tra i due nodi sono posti due trasformatori aventi i seguenti dati di targa:
Trasformatore A
Trasformatore B
An (MVA)
20.0
12.0
Vn1 (kV)
132.0
130.0
Vn2 (kV)
21.0
20.5
Zcc (p.u.)
0.005+j0.100
0.006+j0.120
Y0 (p.u.)
trascurabile
0.002-j0.010
Impedenze e ammettenze sono espresse nel p.u. di ciascuna macchina.
Calcolare le tensione effettiva sul nodo MT a vuoto, sapendo che la tensione lato AT è pari a 136 kV effettivi,
e le correnti di circolazione sui due trasformatori a vuoto.
Grazie alle formule [9.43], la risoluzione del problema è abbastanza semplice. Per prima cosa si tratta di
costruire il modello dei due trasformatori nel p.u. di sistema.
Per il sistema si considererà una potenza di riferimento unificata. Per non far torto a nessuno, e anche per
fare un po' di esercizio, si prenderà una potenza di riferimento diversa da quella nominale di entrambi i
trasformatori:
Ab = 100 MVA
I valori di impedenza o ammettenza possono essere riportati nel p.u. di tale potenza o subito, prima di
iniziare a costruire i circuiti equivalenti a Π dei trasformatori, oppure dopo aver costruito tali modelli. Si opta
per farlo subito, perché ora si hanno 2 soli parametri per ogni trasformatore ( Z& cc ,Y& 0 ), mentre dopo saranno
3 coefficienti per ogni macchina.
Si ricorda per tale operazione la formula [9.20]:
A
Z& cc, pu _ base = Z& cc, pu _ trasf ⋅ base
An
e analogamente per le ammettenze:
A
Y& 0, pu _ base = Y& 0, pu _ trasf ⋅ n
Abase
[9.44]
Quindi:
A
100
Z& cc _ trA, pu _ base = Z& cc _ trA, pu _ trasf ⋅ base = (0.005 + j 0.100) ⋅
= (0.025 + j 0.500)
An
20
A
100
Z& cc _ trB , pu _ base = Z& cc _ trB , pu _ trasf ⋅ base = (0.006 + j 0.120) ⋅
= (0.050 + j1.000)
An
12
A
12
Y& 0 _ trB , pu _ base = Y& 0 _ trB , pu _ trasf ⋅ n = (0.002 − j 0.010) ⋅
= (0.00024 − j 0.00120)
Abase
100
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
da cui:
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 19 di 80
1
Y&d 1 _ trB , pu _ base = Y& d 2 _ trB , pu _ base = ⋅ Y& 0 _ trB , pu _ base = (0.00012 − j 0.00060 )
2
Per il trasformatore A l'ammettenza di magnetizzazione rimane trascurabile, quindi pari 0.
Le tensioni nominali di sistema per i due nodi sono già definite:
Vb1 = 132 kV
Vb 2 = 20 kV
Quindi:
132
= 1.0000
132
130
m1B =
= 0.9848
132
m1 A =
21.0
= 1.0500
20.0
;
20.5
=
= 1.0250
20.0
m2 A =
m2 B
136 j 0
U& AT =
⋅ e = 1.0303 + j 0
132
Ricordando le [9.43]:
Z& L = m1 ⋅ m2 ⋅ Z& cc
1
1
m − m1 1
m − m2 1
Y& 01 = 2
⋅ & + 2 ⋅ Y& d 1; Y& 02 = 1
⋅ & + 2 ⋅ Y& d 2
m1
Z L m1
m2
Z L m2
si ha per il trasformatore A:
Z& L , A = m1 A ⋅ m2 A ⋅ Z& cc, A = 1.0000 ⋅1.0500 ⋅ (0.025 + j 0.500) = 0.02625 + j 0.525
m − m1 A 1
1
1.05 − 1.00
1
Y& 01, A = 2 A
⋅ &
+ 2 ⋅ Y& d 1 A =
⋅
= +0.004750 − j 0.095000
m1 A
Z L , A m1 A
1.00
0.02625 + j 0.525
m − m2 A 1
1 &
1.00 − 1.05
1
Y& 02, A = 1 A
⋅ &
+
⋅Y d 2A =
⋅
= −0.004524 + j 0.090477
m2 A
Z L , A m22 A
1.05
0.02625 + j 0.525
e per il trasformatore B:
Z& L ,B = m1B ⋅ m2 B ⋅ Z& cc,B = 0.9848 ⋅ 1.0250 ⋅ (0.050 + j1.000) = 0.05047 + j1.0095
1
1.0250 − 0.9848
1
0.00012 − j 0.00060
m − m1B 1
Y& 01,B = 2 B
⋅ &
+ 2 ⋅ Y& d 1B =
⋅
+
=
0.9848
0.05047 + j1.0095
m1B
Z L ,B m1B
0.98482
= +0.002014 − j 0.040286 + 0.000124 − j 0.000619 = +0.002138 − j 0.040905
m − m2 B 1
1
0.9848 − 1.0250
1
0.00012 − j 0.00060
Y& 02,B = 1B
⋅ &
+ 2 ⋅ Y& d 2 B =
⋅
+
=
m2 B
Z L ,B m2 B
1.0250
0.05047 + j1.0095
1.0250 2
= −0.001935 + j 0.038708 + 0.000114 − j 0.000571 = −0.001812 + j 0.038137
In sintesi:
Z& L , A = 0.02625 + j 0.525
Z& L , B = 0.05047 + j1.0095
Y& 01, A = +0.004750 − j 0.095000
Y& 01, B = +0.002138 − j 0.040905
Y& 02, A = −0.004524 + j 0.090477
Y& 02, B = −0.001812 + j 0.038137
Le ammettenze derivate all'estremo 1 sono ininfluenti ai fini del calcolo della tensione del nodo MT. Le
ammettenza derivate all'estremo 2 sono invece in parallelo tra loro e poste tra tale nodo e la terra, mentre le
impedenze longitudinali sono pure in parallelo tra loro e poste tra il nodo AT e il nodo MT.
Si calcolano allora i paralleli:
Y& MT ,0 = Y& 02 A + Y& 02 B = −0.006345 + j 0.12861
Versione 1.00 - novembre 2010
⇒
Z& MT ,0 =
1
= −0.3827 − j 7.7563
&
Y MT ,0
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 20 di 80
−1
⎛ 1
1 ⎞
Z& L , parall = Z& L , A || Z& L , B = ⎜⎜ &
+ & ⎟⎟ = 0.0173 + j 0.3454
⎝ Z L, A Z L, B ⎠
Applicando quindi banalmente la regola del partitore di tensione si ha che:
Z& MT , 0
− 0.3827 − j 7.7563
U& MT = &
⋅ U& AT =
⋅1.0303 =
&
Z L , parall + Z MT ,0
0.0173 + j 0.3454 − 0.3827 − j 7.7563
=
− 0.3827 − j 7.7563
⋅1.0303 = (1.0466 + j 0.0000 ) ⋅1.0303 = 1.0783 + j 0.0000
− 0.3654 − j 7.4110
Si possono quindi ora facilmente calcolare le correnti assorbite da ogni trasformatore a ciascun estremo. Le
correnti sono calcolate come positive se entranti nel trasformatore, e sono ovviamente espresse nel p.u. del
sistema (Vb = 132 e 20 kV, Ab = 100 MVA).
Trasformatore A:
U& − U& MT
1.0303 − 1.0783
I&1, A = U& AT ⋅ Y& 01, A + AT &
= 1.0303 ⋅ (+ 0.00475 − j 0.095) +
=
0.02625 + j 0.525
Z L, A
= (+ 0.000396 − j 0.006643)
U& − U& AT
1.0783 − 1.0303
I& 2, A = U& MT ⋅ Y& 02, A + MT&
= 1.0783 ⋅ (− 0.004524 + j 0.090477 ) +
=
0.02625 + j 0.525
Z
L, A
= (− 0.000377 + j 0.006326)
Trasformatore B:
U& − U& MT
1.0303 − 1.0783
I&1, B = U& AT ⋅ Y& 01, BA + AT &
= 1.0303 ⋅ (+ 0.002138 − j 0.04095) +
=
0.050473 + j1.095
Z L, B
= (− 0.000137 + j 0.005306)
U& − U& AT
1.0783 − 1.0303
I& 2, B = U& MT ⋅ Y& 02, B + MT&
= 1.0783 ⋅ (− 0.001821 + j 0.038137 ) +
=
0.050473 + j1.095
Z
L, B
= (− 0.000377 + j 0.006326)
Nel riferimento di sistema la corrente nominale lato AT vale:
I b , AT =
Ab
3 ⋅ Vb , AT
=
100
3 ⋅ 132
= 437.387A
mentre lato MT vale:
I b , MT =
Ab
3 ⋅ Vb , MT
=
100
3 ⋅ 20
= 2.8868kA
Quindi, in valori assoluti, le correnti sui trasformatori sono:
I 1, A = I&1, A ⋅ I b , AT = (+ 0.000396 − j 0.006643) ⋅ 0.4374 kA = +0.173 − j 2.905 A
I 2, A = I& 2, A ⋅ I b , AT = (− 0.000377 + j 0.006326 ) ⋅ 2.8868 kA = −1.088 + j18.262 A
I 1, B = I&1, B ⋅ I b, AT = (− 0.000137 + j 0.005306) ⋅ 0.4374 kA = −0.060 + j 2.321 A
I 2, B = I& 2, B ⋅ I b , MT = (− 0.000377 + j 0.006326) ⋅ 2.8868 kA = +1.088 − j18.262 A
In modulo tali correnti sono pari a:
I1, A = I 1, A = + 0.173 − j 2.905 = 2.911A
I 2, A = I 2, A = − 1.088 + j18.262 = 18.295A
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 21 di 80
I1, B = I 1, B = − 0.060 + j 2.321 = 2.322A
I 2, B = I 2, B = + 1.088 − j18.262 = 18.295A
Queste correnti possono poi essere riportate al p.u. di ciascuna macchina. Per prima coso occorre calcolare
le correnti nominali di macchina:
I n1,trA =
I n1,trB =
AnA
3 ⋅ Vn1, A
AnB
3 ⋅ Vn1, B
=
=
20
3 ⋅ 132
12
3 ⋅ 130
= 87.477 A;
I n 2,trA =
= 53.294 A;
I n 2,trB =
AnA
3 ⋅ Vn 2, A
AnB
3 ⋅ Vn 2, B
=
=
20
3 ⋅ 21.0
12
3 ⋅ 20.5
= 0.5499 kA
= 0.3380 kA
quindi:
I
I
2.911
18.295
= 0.0333; I&2, A, pu _ trA = 2, A =
= 0.0333
I&1, A, pu _ trA = 1, A =
I n1,trA 87.477
I n 2,trA 549.9
I
I
2.322
18.295
I&1, B , pu _ trB = 1, B =
= 0.0436; I&2, B , pu _ trB = 2, B =
= 0.0541
I n1,trA 53.294
I n 2,trA 338.0
I trasformatori hanno quindi delle correnti di circolazione dell'ordine del 3.3÷5.4% delle rispettive correnti
nominali; si tratta di valori significativi ma accettabili.
Da ultimo, con i risultati fin qui ottenuti possono essere ricavate alcune ulteriori informazioni, come per
esempio quale sia l'interscambio dei due trasformatori con l'esterno.
Complessivamente dal nodo AT viene erogata verso i due trasformatori una corrente di:
I& AT →trA + B = I&1, A + I&1, B = (+ 0.000396 − j 0.006643) + (− 0.000137 + j 0.005306 ) = 0.000259 − j 0.001337
mentre dal nodo MT verso i due trasformatori:
I& MT →trA+ B = I&2, A + I&2, B = (− 0.000377 + j 0.006326) + (+ 0.000377 − j 0.006326) = 0
Questi risultati sono coerenti con quanto ci si aspettava. Il nodo MT è a vuoto, quindi non può fornire né
ricevere corrente dai due trasformatori, ma solo prestarsi come punto di scambio di corrente tra le due
macchine. Il nodo AT invece fornirà una corrente complessiva diverso da zero, che può essere anche
calcolata in valori assoluti:
I AT →trA + B = I& AT →trA + B ⋅ I b , AT = (0.000259 − j 0.001337 ) ⋅ 437.387 = 0.113 − j 0.585A
Sicuramente, procedendo per altra via, e cioè con calcoli nel p.u. di ciascuna macchina, si può ottenere la
somma delle correnti magnetizzanti:
-
per il trasformatore A la corrente di magnetizzazione è trascurabile
-
per il trasformatore B: Y& 0 = 0.002 − j 0.010 pu , quindi:
V
136
⋅ (0.002 − j 0.010) = 0.002093 − j 0.010462
I&0 = ⋅ Y& 0 =
Vn
130
per tale macchina la corrente nominale lato AT vale:
I n , AT =
An
3 ⋅ Vn
=
12
3 ⋅ 130
= 53.294 A quindi:
I 0 = I&0 ⋅ I n , AT = (0.002093 − j 0.010462 ) ⋅ 53.294 = 0.112 − j 0.558 A
Domande:
E' corretto confrontare i due valori (corrente calcolata con il metodo in p.u., corrente calcolata come somma
delle correnti magnetizzanti)?
I due valori, trovati per diversa strada, sono quasi uguali; come è spiegabile la differenza di
0. 001 − j 0. 027 A ?.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 22 di 80
9.2 - Esercizi proposti
9.2.1 - Esercizio 1
Nodo 1
Nodo 2
fig. 9.4
Un sistema elettrico trifase, schematizzato in figura, è costituito da:
-
un nodo ("Nodo 1") con tensione nominale pari a 150 kV, tensione effettiva pari a 153 kV, e con alla
spalle un sistema elettrico, trasparente ai fini di questo esercizio, avente potenza di cortocircuito infinita;
questo significa che il nodo può fornire o assorbire qualunque valore di corrente senza subire variazioni
della tensione effettiva (come se alla sue spalle ci fosse un generatore ideale, privo di impedenza);
-
un trasformatore 150 kV / 21 kV, i cui morsetti AT coincidono con il nodo 150 kV suddetto, avente:
.
potenza nominale = 25 MVA
.
impedenza di cortocircuito pari all'8% nel p.u. di macchina
.
con perdite nel rame 150 kW a corrente nominale
.
corrente di magnetizzazione e perdite nel ferro: supposte trascurabili
-
un nodo ("Nodo 2") a 20 kV, coincidente ai morsetti MT del trasformatore suddetto
-
una impedenza shunt, collegata al nodo a 20 kV, di valore pari a 20 + j15Ω per fase (modello a stella).
Si calcoli:
a)
la corrente assorbita dall'impedenza;
b)
la tensione effettiva al nodo 20 kV.
9.2.2 - Esercizio 2
Un sistema elettrico trifase, come da figura, è costituito da un nodo AT con Vn=220 kV di potenza infinita e
da un nodo MT con Vn=30 kV; tra i due nodi sono posti due trasformatori aventi i seguenti dati di targa:
Nodo AT
Nodo MT
Trasformatore A
Trasformatore B
An (MVA)
40.0
30.0
Vn1 (kV)
220.0
225.0
Vn2 (kV)
31.5
30.0
Zcc (p.u.)
0.003+j0.120
0.004+j0.140
Y0 (p.u.)
trascurabile
trascurabile
fig. 9.5
Impedenze e ammettenze sono espresse nel p.u. di ciascuna macchina.
Al nodo MT è collegata una ammettenza shunt di impedenza 20 + j15Ω per fase (modello a stella).
Calcolare:
a)
la tensione effettiva sul nodo MT quando questo sia a vuoto (impedenza shunt non collegata);
b)
le correnti di circolazione sui due trasformatori in tale condizione;
c)
la tensione effettiva sul nodo MT quando l'impedenza sia in servizio;
d)
le correnti sui due trasformatori in tale condizione.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 23 di 80
10 - Calcolo dello stato di regime negli impianti elettrici
10.1 - Elementi di teoria ed esempi
10.1.1 - Tassonomia dei nodi e caratteristiche dei carichi
In un sistema elettrico i nodi possono essere classificati in base alle loro condizioni di generazione e di
carico:
-
Le sbarre di potenza infinita (in realtà la potenza che essi possono erogare non è infinita, ma solo molto
grande) hanno un valore di tensione imposta, che non cambia al variare delle condizioni di carico; sono
in grado di fornire (o assorbire) qualunque quantità di potenza attiva e reattiva che la rete richieda (o
che la rete ceda per esubero); per questo un nodo di questo tipo viene chiamato nodo di saldo (o,
dall'inglese, "nodo slack") perché è in grado di chiudere il bilancio delle potenze attive e reattive in rete:
potenze assorbite dal carico + perdite = potenze erogate dai generatori + potenza erogata dal nodo di
potenza infinita. Solitamente la tensione di questi nodi viene presa come riferimento per l'angolo di fase
di tutte le grandezze fasoriali. Per tale ragione vengono anche definiti nodi " θ,V " perché per essi
angolo di fase e modulo della tensione sono le grandezze prefissate, mentre le grandezze P, Q
erogate sono libere, e dipenderanno da quanto richiede il resto della rete.
-
Le sbarre in cui sono presenti generatori sono solitamente esercite a tensione imposta. Il regolatore di
tensione del generatore o dei generatori in esse presenti è predisposto in modo da adeguare
automaticamente la corrente di eccitazione al variare del carico in modo che la tensione ai morsetti
rimanga costante, ad un valore prefissato da chi esercisce il sistema. Inoltre, il regolatore di velocità (o
di potenza) è predisposto in modo da fare erogare ai morsetti un valore di potenza attiva costante (a
meno che la frequenza in rete non si allontani dal valore nominale, ma di questo si discuterà in altra
sede). Per tale ragione vengono anche definiti nodi " P,V " perché per essi le grandezze prefissate sono
modulo della tensione e potenza attiva erogata, mentre le grandezze θ, Q sono libere, e dipenderanno
dall'interazione di questo nodo con il resto della rete.
-
Le sbarre in cui sono presenti solo carichi sono solitamente chiamate nodi " P, Q ", perché queste
(potenza attiva e reattiva assorbite) sono le grandezze prefissate, mentre la tensione in modulo e fase è
libera, e θ,V assumeranno i valori opportuni affinché dai vari rami afferenti al nodo convergano verso il
nodo medesimo potenze attive e reattive in valore complessivo pari a quanto il carico richiede. Anche i
nodi di puro transito e di incrocio tra più rami possono essere, per estensione, ritenuti nodi di tipo
" P, Q ", dove però potenza attiva e reattiva assorbite o cedute all'esterno sono pari a 0. In alcuni casi
anche i nodi di generazione possono essere ritenuti di tipo " P, Q ": quando il regolatore di tensione
funziona in modo da fornire una potenza reattiva costante, anziché una tensione prefissata (pertanto, in
tali condizioni, la tensione è libera); oppure quando la potenza reattiva che la rete richiede al generatore
supera i limiti di capability della macchina sincrona, e quindi il regolatore di tensione non è in grado di
conservare la tensione prefissata: la potenza reattiva fornita è pari al limite che si è tentato di superare,
la tensione è libera.
Un breve commento riguarda il fatto che i carichi vengano considerati con valori di potenza attiva e reattiva
non solo prefissati, ma costanti, anche al variare della tensione. Questo modello è una approssimazione
della realtà.
Nella realtà i carichi passivi (resistenze o comunque impedenze) sono solitamente bipoli lineari, e pertanto
potenza attiva e reattiva assorbite seguono una legge quadratica al variare della tensione. Tuttavia, per un
impianto industriale o per una porzione di territorio civile tali carichi sono solo una parte, spesso piccola, del
carico complessivo; la parte rimanente è costituita da carichi attivi (motori) oppure da dispositivi elettronici di
potenza (la cui diffusione è molto cresciuta negli ultimi anni, e tende a crescere ulteriormente), che seguono
leggi diverse da quelle lineari.
Anche per i carichi lineari è comunque ipotizzabile, almeno in termini statistici, una autoregolazione, sia essa
artificiale oppure gestita dall'uomo: se per esempio la finalità di una stufetta elettrica è quella di scaldare un
ambiente, qualora la tensione applicata dovesse aumentare, aumenterà anche il calore prodotto, e quindi la
temperatura; l'utente interverrà per ridurre la potenza erogata, agendo sulla manopola di regolazione con la
conseguenza di ridurre la corrente assorbita (vengono messi fuori servizio uno o più degli elementi resistivi
in parallelo) e quindi di riportare l'assorbimento di potenza al valore originale. L'esempio è banale e forse
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 24 di 80
troppo semplicistico, ma aiuta a comprendere come in termini statistici, su un grande numero di utenti, quello
che tende a rimanere costante è la potenza complessiva richiesta.
Inoltre, quasi tutti i trasformatori usati nella distribuzione dell'energia elettrica sono di tipo LTC (on-Load Tap
Changer), vale a dire con variatori di prese sotto carico, in grado cioè di adeguare il rapporto di
trasformazione in modo da fornire al carico una tensione di alimentazione il più possibile costante
(ovviamente, le prese permettono una regolazione a scalino e non continua, ma tra scalino e scalino la
distanza è piccola).
Per i carichi attivi (motori asincroni) la potenza attiva è pressoché costante al variare della tensione in quanto
la caratteristica elettromeccanica ("curva di coppia") segue una legge quadratica al variare della tensione,
per cui al variare di quest'ultima il punto di lavoro si sposta, ma coppia e velocità meccanica, e quindi
potenza meccanica, cambiano di pochissimo; cambiano un poco le perdite attive, ma queste sono
comunque già una percentuale piccola rispetto alla potenza meccanica (2÷6%); cambiando di pochissimo la
potenza meccanica e di poco le perdite, la potenza elettrica, pari alla somma di tali due grandezze, subisce
solo lievi variazioni al variare della tensione. Più sensibile la variazione della potenza reattiva, che segue
leggi non lineari e neppure quadratiche. Tuttavia anche per questi carichi sono spesso presenti trasformatori
tipo LTC che riducono molto l'entità delle variazioni di tensione lato carico e quindi della potenza reattiva
assorbita.
Il modello " P, Q " costante è quindi una buona approssimazione per i carichi se questi sono visti da nodi AT
e in MT (cioè con i trasformatori LTC già inclusi nel carico medesimo e quindi "trasparenti"). Altri modelli
prevedono carichi con leggi del tipo:
P + jQ = P0 ⋅ V& α + jQ0 ⋅ V& β
[10.1]
dove α e β sono esponenti in generali diversi da 2. In queste esercitazioni questi modelli più sofisticati non
verranno per ora considerati.
In una rete di N nodi si avranno N PV nodi di tipo "PV", N PQ nodi di tipo "PQ" e un nodo di saldo, con:
N = 1 + N PV + N PQ
[10.2]
10.1.2 - Iniezioni nodali e matrice delle ammettenze nodali
Per ogni nodo di un sistema elettrico si considerino:
a)
le correnti che da tale nodo, attraverso i rami della rete ad esso afferenti, vanno verso i nodi adiacenti
(ammettenze longitudinali dei circuiti equivalenti a Π dei rami) oppure verso terra (ammettenze derivate
dei circuiti equivalenti a Π dei rami e ammettenze dei rami shunt nodali);
b)
le correnti che dall'esterno siano iniettate nel nodo: generatori (correnti iniettate positive) e carichi
(correnti iniettate negative).
In base al principio di Kirchhoff ai nodi, la somma (fasoriale) delle correnti di cui al punto "a)" è pari alla
somma (fasoriale) delle correnti di cui al punto "b)".
Se si considera la matrice delle ammettenze nodali, vale che:
[I&] = [Y& ]⋅ [U& ]
[10.3]
dove, ovviamente:
[I&]
[U& ]
[Y& ]
è il vettore colonna delle correnti iniettate dall'esterno nel nodo (verso convenzionale positivo se
entranti), in p.u.;
è il vettore colonna delle tensioni nodali, in p.u.;
è la matrice delle ammettenze nodali, in p.u..
Per cui:
N
I&i = ∑ Y& ij ⋅ U& j
[10.4]
j =1
dove N è il numero dei nodi. Normalmente la matrice delle ammettenze è fortemente sparsa, vale a dire
che per ciascuna riga/colonna il numero di elementi diversi da 0 è solo una piccola percentuale del numero
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 25 di 80
totale di elementi. Infatti sono diversi da zero solo gli elementi diagonali e gli elementi fuori diagonale
corrispondenti ai soli nodi j collegati al nodo i ; in una normale rete di trasmissione o di distribuzione
ciascun nodo è collegato, in media, solo ad altri 2 o 3 nodi, mentre N può essere anche molto grande
(decine, centinaia, o anche migliaia di nodi). La sommatoria [10.4] quindi si riconduce alla somma di solo
pochi elementi per ciascun nodo i -esimo:
I&i = Y& ii ⋅ U& i +
∑ Y& ij ⋅ U& j
[10.5]
j∈C (i )
dove C (i ) è l'insieme dei nodi j collegati al nodo i (mediante linee, trasformatori, etc.);
Un altro modo di studiare il problema è il seguente:
∑
I&i = U& i ⋅ y& sh ,i +
j∈C (i )
(U& ⋅ y&
i
ij 0
(
)
+ U& i − U& j ⋅ y& ijL
)
[10.6]
dove:
y& sh,i
è una eventuale ammettenza shunt nel nodo (si pone = 0 se non è presente);
y& ij 0
è l'ammettenza derivata nell'estremo
y& ijL
è l'ammettenza longitudinale del circuito equiv. a Π tra il nodo
i del circuito equiv. a Π tra il nodo i e il nodo j ;
i e il nodo j ;
le ammettenze sono state scritte in lettere minuscole per non confonderle con gli elementi della matrice delle
ammettenze nodali, che sono in maiuscolo.
La [10.6] può essere riscritta come:
⎛
I&i = ⎜ y& sh ,i +
⎜
⎝
(y&
()
∑
j∈C i
)
⎞
& ⎟ ⋅ U& i +
y
+
ij 0
ijL ⎟
⎠
∑
j∈C (i )
(− y& )⋅U&
ijL
[10.7]
j
ed è evidente come questa formulazione sia del tutto equivalente alla formulazione [10.4]. Infatti per
definizione:
Y& ii = y& sh , i +
∑
j∈C (i )
(y&
ij 0
+ y& ijL
)
[10.8]
Y& iy = − y& ijL
e quindi la [10.7] equivale a:
I&i = Y& ii ⋅ U& i +
∑ Y& ij ⋅ U& j
[10.9]
j∈C (i )
che altri non è se non la [10.5], equivalente alla [10.4].
Grazie a queste espressione è possibile ricavare la formula che esprime il valore della potenza attiva e
reattiva iniettata nel nodo dall'esterno (generatori, carichi, etc.):
*
*
*
A& i = P&i + jQ& i = U& i ⋅ I&i = U& i ⋅ U& i ⋅ Y& ii +
∑U& i ⋅ U& j ⋅ Y& ij
*
*
[10.10]
j∈C (i )
siano allora, per i generici nodi k e l :
U& k = U& k ⋅ e jθk ;Y& kl = G& kl + B& kl
[10.11]
la [10.10] può quindi essere riscritta come:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
*
*
A& i = P&i + jQ& i = U& i ⋅ U& i ⋅ Y& ii +
= U& i2
) ∑ U&
()
⋅ (G& − jB& ) + ∑ U&
= U& i2
⋅ G& ii − jB& ii +
= U& i2
(
⋅ G& ii − jB& ii +
ii
ii
j∈C i
j∈C (i )
(
) ∑ U&
()
j∈C i
i
1C - Introduzione agli Impianti Elettrici
∑ U& i ⋅ U& j ⋅ Y& ij =
*
j∈C (i )
⋅ U& j ⋅ e
(
j θi −θ j
(
*
)
) &
⋅ Gij − jB&ij =
(
)(
[10.12]
)
&
&
&
i ⋅ U j ⋅ cos θ ij + j sin θij ⋅ Gij − jBij =
i
p. 26 di 80
((
)
(
⋅ U& j ⋅ + G& ij cos θij + B& ij sin θij + j ⋅ − B& ij cos θij + G& ij sin θij
))
dove θij = θi − θ j ;
vale a dire:
P&i = +G& ii ⋅ U& i2 +
∑ U& i ⋅ U& j ⋅ (+ G& ij cos θij + B&ij sin θij )
j∈C (i )
Q& i = − B& ii ⋅ U& i2 +
∑ U& i ⋅ U& j ⋅ (− B&ij cos θij + G& ij sin θij )
[10.13]
j∈C (i )
Si noti come le espressioni della potenza siano non-lineari, e come la potenza attiva o reattiva iniettata in un
nodo dipenda: dai parametri passivi della rete, che possono essere considerati costanti, e dalla tensione in
modulo e fase del nodo interessato e dei nodi ad esso collegati. Si può anche scrivere, in forma generale e
simbolica:
( [ ] {[Y& ]})
( [ ] {[Y& ]})
P&i = f P ,i [θ], U& ,
Q& i = f Q ,i [θ], U& ,
[10.14]
dove f P ,i e f Q ,i sono le funzioni non lineari [10.13] che esprimono le potenze attiva e reattiva nel nodo i -
[ ]
esimo; negli argomenti di tali funzioni si evidenziano le variabili indipendenti (tensione in modulo U& e fase
[θ] ), che possono variare con le condizioni di funzionamento o le imposizioni del gestore della rete, e i
[]
parametri ( Y& ) che sono posti, per distinzione, tra parentesi graffe, e che sono invece invarianti (fin quando
la rete non viene modificata; si trascurano le dipendenze dei parametri passivi dai valori delle tensioni e delle
correnti).
10.1.3 - Le reti radiali
Un caso particolare, ma molto comune, di reti elettriche è quello delle reti radiali.
A partire da un nodo che può essere assimilato ad un nodo di potenza infinita si dipartono delle serie di rami
in configurazione radiale, cioè senza ulteriori connessioni tra una serie di rami e un'altra; queste serie di rami
sono composte da linee ed, eventualmente, da trasformatori, posti tutti in serie l'uno all'altro; nei vari nodi di
congiunzione tra un ramo e il successivo possono essere posti dei carichi. Il ramo o la serie di rami tra carico
e carico prende spesso il nome di tratta.
Ciascuna serie di rami, dal punto di partenza fino al nodo più lontano, prende il nome di dorsale; perché il
sistema possa ancora essere chiamato radiale sono ammesse eventuali biforcazioni della dorsale, purché le
varie sottodorsali così ottenute non abbiano successivi punti di ricongiunzione.
Il sintesi, il sistema può essere definito radiale se non esistono in esso maglie o anelli chiusi.
La dorsale può essere costituita per l'intera sua lunghezza del medesimo tipo di cavo o di linea aerea,
oppure di cavi o linee con caratteristiche differenti (tipicamente, con sezione e quindi portata maggiore le
prime tratte, poi a decrescere nelle successive).
Quando siano noti:
a)
il valore della tensione del nodo iniziale (nodo di alimentazione) della dorsale,
b)
i parametri elettrici ( R, X ) delle varie tratte della dorsale,
c)
i valori dei carichi P&Ci + jQ& Ci nei nodi della dorsale, modellizzati come carichi "PQ",
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 27 di 80
allora sono disponibili vari metodi per calcolare la tensione in tutti i nodi, e di conseguenza le correnti in tutte
le tratte. Esistono metodi diretti, che calcolano la caduta di tensione su una tratta, ma con una certa
approssimazione; esistono metodi iterativi, che procedono per approssimazioni successive, ma che
garantiscono una soluzione esatta fino al livello di precisione desiderato (compatibilmente con la potenzialità
degli strumenti di calcolo).
Verrà per primo considerato il metodo approssimato per il calcolo della c.d.t. in una tratta. Siano noti:
-
la tensione del nodo di partenza U& 1 ; per comodità si considererà pari a 0 la fase di tale tensione;
-
la potenza attiva e reattiva in transito sulla tratta dall'estremo 1 all'estremo 2, misurata al nodo di
partenza, che verrà indicata come P&T 1 + jQ& T 1 ;
-
i parametri elettrici ( R, X ) della tratta
In realtà è molto più frequente conoscere la potenza assorbita al nodo di arrivo: il caso tipico è infatti quello
di un nodo di carico, con valore del carico noto, alimentato da una linea che lo congiunge ad un nodo più a
monte, di cui è invece nota la tensione. In tal caso si può approssimare la potenza in partenza da tale nodo
pari alla potenza di arrivo, cioè quella assorbita dal carico, trascurando le perdite; tale scelta comporta
l'introduzione di una approssimazione che si aggiungerà a quella insita nel metodo.
Con i valori noti si avrà una corrente fluente da 1 a 2:
& * &
&
&
&I = ⎛⎜ PT 1 + jQT 1 ⎞⎟ = PT 1 − jQT 1
12
⎟
⎜
U& 1
U&1
⎠
⎝
[10.15]
dove si è considera pari a 0 la fase della tensione, per cui la tensione all'estremo 2 vale:
X& ⋅ P&T 1 − R& ⋅ Q& T 1
R& ⋅ P&T 1 + X& ⋅ Q& T 1
P& − jQ&
−
j
U& 2 = U& 1 − R& + jX& ⋅ I&12 = U&1 − R& + jX& ⋅ T 1 & T 1 = U&1 −
U&1
U&1
U1
(
)
(
)
[10.16]
Se la rete è in normali condizioni di funzionamento, la caduta di tensione non è eccessiva; quindi i termini:
R& ⋅ P&T 1 + X& ⋅ Q& T 1
U&1
e
X& ⋅ P&T 1 − R& ⋅ Q& T 1
U&1
[10.17]
sono almeno un ordine di grandezza inferiori rispetto al termine U& 1 . Quindi il rapporto fra la parte in
quadratura e quella in fase (parte reale e parte immaginaria) è abbastanza piccolo (dell'ordine di 0.1 o
inferiore); si definisce:
X& ⋅ P&T 1 − R& ⋅ Q&T 1
U&1
ε=
R& ⋅ P&T 1 + X& ⋅ Q&T 1
U&1 −
U&
−
[10.18]
1
per cui:
⎛
R& ⋅ P&T 1 + X& ⋅ Q& T 1 ⎞
⎟⎟ ⋅ (1 + jε )
U& 2 = ⎜⎜U&1 −
U&1
⎠
⎝
[10.19]
e passando al modulo:
⎛
R& ⋅ P&T 1 + X& ⋅ Q&T 1 ⎞
⎟⎟ ⋅ 1 + ε 2
U& 2 = ⎜⎜U&1 −
&
U
1
⎠
⎝
[10.20]
ma se ε << 1 , allora vale:
1 + ε2 ≅ 1 +
ε2
2
[10.21]
quindi:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
⎛
R& ⋅ P&T 1 + X& ⋅ Q& T 1 ⎞ ⎛ ε 2 ⎞
⎟⎟ ⋅ ⎜1 + ⎟
U& 2 ≅ ⎜⎜U&1 −
⎜
U&1
2 ⎟⎠
⎝
⎠ ⎝
Se ε è piccolo, a maggior ragione è molto più piccolo
1+
p. 28 di 80
[10.22]
ε 2 , quindi:
R& ⋅ P&T 1 + X& ⋅ Q& T 1
ε2
≅ 1 ⇒ U& 2 ≅ U&1 −
U&1
2
[10.23]
per cui in modulo:
R& ⋅ P&T 1 + X& ⋅ Q&T 1
ΔU&12 = U&1 − U& 2 ≅
U&
[10.24]
1
Si noti che la formula si applica solo ai moduli delle tensioni, e non fornisce invece alcuna informazione sulle
fasi.
Tale formula quindi:
-
contiene una approssimazione perché la c.d.t. è calcolata trascurando il termine in quadratura;
se le potenze utilizzate sono quelle del secondo estremo, contiene un ulteriore approssimazione perché
sono state trascurate le perdite sulla tratta.
Tuttavia è un metodo diretto, non iterativo, di semplice applicazione, e fornisce valori con precisione
accettabile per tratte non eccessivamente lunghe e non eccessivamente cariche.
La formula [10.24] può anche essere vista in valori assoluti:
*
I 12
⎛ P + jQT 1 ⎞
P − jQT 1
⎟⎟ = T 1
= ⎜⎜ T 1
3 ⋅ U&1
⎝ 3 ⋅U 1 ⎠
[10.25]
dove le potenze sono espresse in MW, Mvar, le tensioni in kV, le correnti in kA, le impedenze in Ω.
U 2 = U 1 − (R + jX ) ⋅ I 12 = U1 −
ΔU12 = U1 − U 2 ≅
R ⋅ PT 1 + X ⋅ QT 1
X ⋅ PT 1 − R ⋅ QT 1
−j
&
3 ⋅ U1
3 ⋅ U&1
[10.26]
R ⋅ PT 1 + X ⋅ QT 1 R ⋅ PT 1 + X ⋅ QT 1
=
3 ⋅ U1
3 ⋅ V1
ΔV12 = 3 ⋅ ΔU12 ≅ 3 ⋅
[10.27]
R ⋅ PT 1 + X ⋅ QT 1 R ⋅ PT 1 + X ⋅ QT 1
=
V1
3 ⋅ V1
[10.28]
Nel caso di una dorsale:
a)
Si assegni ai nodi una numerazione progressiva: sia "0" il nodo di partenza della dorsale, "1" il
successivo, e così via. Si assegni una numerazione progressiva a ciascuna tratta, assegnando il
medesimo numero del suo estremo a valle: per esempio la tratta tra il nodo "0" e il nodo "1" sarà la
tratta "1", tra i nodi "1" e "2" sarà la tratta "2", etc.
b)
Si calcoli il transito di potenza attiva e reattiva in ciascuna tratta. Questo valore, che nel seguito verrà
indicato come: P&Ti + jQ&Ti è pari alla somma di tutti i carichi che stanno a valle della tratta medesima:
N
P&Ti + jQ&Ti = ∑ P&Ci + jQ& Ci
[10.29]
j =1
dove N = n° complessivo di nodi della dorsale.
Siano inoltre: R&Ti + jX& Ti le impedenze di ciascuna tratta i -esima.
La formula approssimata [10.24] può essere applicata in cascata: a partire dal nodo "0" si calcola la tensione
del nodo "1"; con questa, quella del nodo "2", etc. Volta per volta si cambia riferimento di fase, considerando
pari a 0 l'angolo della fase della tensione nel nodo considerato.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 29 di 80
Ovviamente gli errori dovuti alle approssimazioni introdotte hanno un effetto composto, per cui nel caso di
tratte numerose e/o lunghe e/o molto cariche il valore calcolato della tensione dei nodi più lontani può essere
affetto da errore rilevante.
Viene ora considerato un metodo esatto per calcolo della tensioni in una dorsale.
Questo metodo parte dal fondo della dorsale.
a)
Si ipotizzi per l'ultimo nodo della dorsale un valore di tentativo della tensione in modulo; tale valore di
tentativo potrà essere scelto pari al valore della tensione al nodo di partenza della dorsale (nodo di
potenza infinita) oppure, per una migliore inizializzazione, può essere usato il metodo della formula
approssimata per la c.d.t., come sopra descritto. Il valore di tentativo sarà indicato come:
U& N(0 )
[10.30]
dove il pedice N indica che si tratta dell'ultimo nodo della dorsale, e l'apice (0) che si tratta del
tentativo iniziale.
b)
In generale si indichi con i la tratta corrente. Si pone quindi ora i = N .
In generale si indichi con (k ) l'iterazione corrente. Al primo tentativo è quindi k = 0 .
La potenza attiva e reattiva che fluisce sulla tratta e arriva al nodo
i -esimo, e che verrà indicata come:
P&T(,ki ) + jQ&T(k,i)
[10.31]
è pari alla potenza attiva e reattiva assorbita dal carico in tale nodo più la potenza transitante verso le
tratte successive, pari a sua volta alla somma delle potenze di tutti i carichi successivi più le perdite
nelle tratte successive.
Così al nodo N -esimo tale potenza è pari alla potenza del solo carico ivi posto:
P&T , N + jQ&T , N = P&C , N + jQ& C , N
[10.32]
nel nodo precedente, N − 1 -esimo:
(k )
& (k )
&
&
P&T(,kN) −1 + jQ& T(k, N) −1 = P&C , N −1 + jQ& C , N −1 + P&loss
, N + jQloss , N + PC , N + jQC , N =
(k )
& (k )
&
&
= P&C , N −1 + jQ& C , N −1 + P&loss
, N + jQloss , N + PT , N + jQT , N
[10.33]
ma più in generale sarà:
N
(
) ∑ (P& ( )
P&T(,ki ) + jQ& T( k,i) = ∑ P&C , j + jQ& C , j +
j =i
N
j =i +1
k
loss , j
(k )
+ jQ& loss
,j
)
[10.34]
dove:
P&C , j + jQ& C , j
= potenza assorbita dal carico nel nodo j -esimo
(k )
& (k )
P&loss
, j + jQloss , j
= potenza dissipata sulla tratta j -esima (dal nodo " j − 1 " al nodo " j ")
e quindi:
(k )
& (k )
& (k )
& (k )
P&T(,ki) + jQ&T(k,i) = P&C ,i + jQ& C ,i + P&loss
, i +1 + jQloss , i +1 + PT , i +1 + jQT , i +1
[10.35]
tale formula è forse la più comoda, perché evita di rifare da capo le sommatorie per ogni tratta, ma
semplicemente aggiunge due valori complessi al risultato della tratta immediatamente a valle.
Le potenze dissipate, e di conseguenza le potenze fluenti sulle tratte, sono indicate con l'indice del
numero di iterazione perché ad ogni tentativo il valore calcolato sarà diverso, avvicinandosi volta per
volta al valore esatto.
c)
In funzione di tale valore di tensione, essendo nota la potenza assorbita dal carico nel nodo, si calcola
la corrente nella tratta:
(k )
(k )
(k ) P& − jQ&
I&T ,i = T ,i (k ) T ,i
U& i
Versione 1.00 - novembre 2010
[10.36]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
dove si è posta pari a 0 la fase della tensione al nodo
d)
p. 30 di 80
i -esimo.
Con tale valore di corrente si possono calcolare la perdite sulla tratta:
(
(k )
& (k )
&(k )2 &
&
P&loss
, i + jQloss , i = I T , i ⋅ RT , i + X T , i
)
[10.37]
e quindi nel nodo immediatamente più a monte si avrà:
(k )
& (k )
P&T(,ki)−1 + jQ& T(k, i)−1 = P&T(,ki) + jQ& T(k, i) + P&C(k, i)−1 + jQ& C(k, i)−1 + P&loss
, i + jQloss , i =
(
2
= P&T(,ki) + jQ& T(k, i) + P&C(k, i)−1 + jQ& C(k, i)−1 + I&T(k, i) ⋅ R&T , i + X& T ,i
e)
[10.38]
)
La tensione al nodo immediatamente a monte vale:
P&T(,ki ) − jQ&T(k, i)
(k )
(k )
(k )
(k )
&
&
&
&
&
&
&
&
U i −1 = U i + RT , i + X T , i ⋅ I T , i = U i + RT , i + X T , i ⋅
=
U& i(k )
(k )
& (k )
X& ⋅ P& (k ) + R& ⋅ Q& (k )
(k ) R& ⋅ P& + X& ⋅ Q
= U& i + T ,i T , i (k ) T , i T , i + j T , i T , i (k ) T , i T , i
U& i
U& i
(
)
(
)
[10.39]
di tale tensione può essere facilmente calcolato il modulo:
(k )
U& i(−k1) = U& i −1
f)
[10.40]
se " i − 1 " non è ancora il nodo iniziale della dorsale (nodo "0"), allora si pone i = i − 1 e si torna al punto
"c)": la tensione di tale nodo è nota dalle [10.39] e [10.40]; le potenze attiva e reattiva sulla tratta sono
nota dalla [10.38].
( )
Se invece si è arrivati al nodo di partenza ( i − 1 = 0 ), si sarà ottenuto un valore di tensione U& 0k .
Questo valore va confrontato con il valore noto U& 0 . Sia:
α=
U& 0(k )
U&
[10.41]
0
Allora:
-
se α = 1 , o se α − 1 ≤ ε dove ε è una tolleranza prefissata (deve essere piccola, dell'ordine di
10 −4 ÷ 10 −6 ), allora il metodo è arrivato a soluzione, con la precisione indicata dalla tolleranza;
-
se invece α è maggiore o minore di 1 in una misura superiore alla tolleranza, occorre formulare una
nuova tensione di tentativo per il nodo finale e ripartire da capo, tornando al punto "b)".
In quest'ultimo caso il criterio per il nuovo valore di tentativo è il seguente:
U& N(k +1) 1
=
α
U& N(k )
[10.42]
vale a dire: se con il tentativo corrente si è ottenuto all'inizio della dorsale un valore superiore di quello
previsto, nel tentativo successivo si partirà con una tensione inferiore, rispetto al tentativo corrente,
nella medesima misura; e viceversa.
Il medesimo procedimento, con formule analoghe, può essere utilizzato per il calcolo in valori assoluti
anziché in p.u.; basta utilizzare le tensioni di fase e ricordare il fattore 3 oppure le tensioni concatenate e il
fattore
3.
Il metodo non fornisce i valori delle fasi delle tensioni; tuttavia, una volta raggiunta la soluzione ed essendo
quindi note le correnti e le potenze fluenti in tutte le tratte, si può partire dal nodo iniziale e ridiscendere ai
successivi, calcolando le c.d.t. in forma fasoriale.
Il metodo è di facile applicazione, i calcoli che richiede possono essere affrontati con l'ausilio di una piccola
calcolatrice palmare. Esso però è applicabile alle sole reti radiali, e richiede comunque qualche iterazione
per arrivare a soluzione.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 31 di 80
Per affrontare lo studio del regime non solo di reti radiali, ma di reti qualunque (ad anello, magliate) e
ottenere risultati più precisi e completi sono oggi disponibili altri algoritmi più sofisticati, sempre di tipo
iterativo, noti come metodi di calcolo di Load-Flow.
10.1.4 - [Approfondimento] Il problema del Load-Flow
Questo sottocapitolo è un approfondimento e non un argomento obbligatorio nella preparazione dell'esame.
Se ne consiglia lo studio a chi ha passione per la materia. Può essere l'argomento di una domanda
facoltativa per il raggiungimento di un voto molto alto (lode).
Poiché in un sistema elettrico sono noti:
-
per il nodo di saldo, la tensione in modulo e fase;
-
per i nodi "PV", la tensione in modulo e la potenza attiva iniettata dall'esterno;
-
per i nodi "PQ", la potenza attiva e reattiva assorbita dall'esterno;
rimangono per ora ignoti la fase della tensione per i nodi "PV" e la tensione in modulo e fase per i nodi "PQ".
Si hanno quindi:
-
N PV + N PQ
fasi di tensioni incognite
-
N PQ
moduli di tensioni incogniti
per un totale di N PV + 2 ⋅ N PQ incognite. Una volta che siano trovati i valori di queste incognite, è banale
calcolare:
-
i flussi di corrente e quindi di potenza attiva e reattiva in tutti i rami (da cui il nome "load-flow");
-
i valori delle potenze reattive erogate o assorbite dai generatori nei nodi "PV";
-
i valori della potenza attiva e reattiva erogati o assorbiti dal nodo di saldo;
-
i valori delle perdite attive e reattive in ogni ramo e complessive in tutta la rete;
-
le eventuali violazioni di tensione nei nodi, di corrente nelle linee e nei trasformatori;
-
etc.
La soluzione di questo problema è quindi molto utile:
a)
per verificare il funzionamento della rete per una data condizione di carico e di generazione;
b)
per poter meglio pianificare condizioni future di generazione e di carico;
c) per poter meglio progettare una rete futura, verificando che il funzionamento risponderà alle specifiche
previste senza dover attendere le verifiche sperimentali possibili solo a rete ultimata, e quindi con la
possibilità di correggere il progetto dove necessario, o di ottimizzarlo.
Per ciascuno dei nodi "PV" è possibile scrivere una equazione di attivo come da [10.14] cioè da [10.13].
Per ciascuno dei nodi "PQ" è invece possibile scrivere una equazione di attivo e una di reattivo, sempre
come da [10.14] cioè da [10.13].
Si hanno così N PV + N PQ equazioni di attivo e N PQ equazioni di reattivo per un totale di N PV + 2 ⋅ N PQ
equazioni. Si nota allora che il numero delle incognite è pari al numero delle equazioni, pertanto è possibile
trovare la soluzione del problema, se questa esiste e se si riesce a trovare un modo per risolvere il sistema.
Questo non è semplice per due motivi:
a)
il sistema non è lineare;
b)
il sistema ha dimensione compresa tra il numero di nodi della rete e il doppio di tale numero meno,
quindi già per reti medio-grandi è un sistema di notevoli dimensioni.
Per analogia con al formulazione [10.14] il sistema potrebbe essere scritto come:
[ (
[ (
[ ] , {[Y& ], [θ] , [U& ]
[ ] , {[Y& ], [θ] , [U& ]
⎡ FP [θ]PV , PQ , U&
⎢
&
⎣⎢ FQ [θ]PV , PQ , U
PQ
slack
PV , slack
PQ
slack
PV , slack
})]⎤ = ⎡[P]
})]⎥⎦⎥ ⎢⎣[Q]
PV , PQ ⎤
PQ
⎥
⎦
[10.43]
dove:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
[FP (K)],[FQ (K)]
sono le potenze attive e reattive note (attive nei nodi "PV" e "PQ", reattive nei nodi "PQ")
PQ
sono le tensioni in modulo e fase incognite (modulo nodi "PQ", fase nodi "PV" e "PQ")
PV , PQ
PQ
PV , slack
p. 32 di 80
sono le equazioni della potenza attiva e reattiva nei vari nodi, come da [10.14] e [10.13]
[P& ] ,[Q& ]
[U& ] , [θ]
[U& ] , [θ]
PV , PQ
1C - Introduzione agli Impianti Elettrici
sono le tensioni note (modulo nei nodi "PV" e nel nodo di saldo, fase nel nodo di saldo),
slack
che ora sono poste entro le parentesi graffe per indicare che sono parametri (come gli elementi della matrice
delle ammettenze nodali) e non incognite.
Quindi, senza esplicitare i parametri invarianti e le tensione note, ma evidenziando solo le incognite, il
sistema può essere riscritto più sinteticamente:
[ (
[ (
[ ] )]⎤ = ⎡[P]
[ ] )]⎥⎥⎦ ⎢⎣[Q]
⎡ FP [θ]PV , PQ , U&
⎢
&
⎢⎣ FQ [θ]PV , PQ , U
PQ
PV , PQ ⎤
PQ
PQ
⎥
⎦
[10.44]
Come si risolve un sistema non lineare? I metodi risolutivi sono di tipo numerico, basati su approssimazioni
successive della soluzione; sono quindi metodi iterativi, in cui le iterazioni sono ripetute fino a quando i valori
trovati delle incognite sono tali da soddisfare il sistema non lineare con una sufficiente precisione
(convergenza).
Il metodo più usato è un metodo tipo Newton, che verrà dapprima esemplificato per una equazione nonlineare di tipo scalare. Sia:
~
f (x ) = f
[10.45]
una equazione non lineare scalare in una sola incognita. L'algoritmo è il seguente:
a)
b)
si ponga l'incognita
x pari ad un valore iniziale di tentativo: x = x (0 ) ; in generale, nelle iterazioni
successive, sarà x = x (k ) ;
( ( ) ) e si verifica se il valore
si calcola quindi f x k
sarà:
x = x (k ) porta a soddisfare l'equazione di partenza;
( )
~
f x (k ) + ε (k ) = f
[10.46]
dove ε (k ) è l'errore ottenuto in questa iterazione k -esima. Se tale errore (in valore assoluto) è inferiore
ad una soglia prefissata, chiamata tolleranza, allora il processo di ricerca della soluzione è terminato
con esito favorevole. Se invece si è ancora lontani dalla soluzione, l'equazione può essere scritta come:
( )
f ( x ) = f x (k ) +
(
)
2
~
df
d2 f
⋅ Δ x (k ) +
⋅ Δ x (k ) + K = f
2
dx
dx
[10.47]
( )
dove le derivate sono calcolate in corrispondenza di x = x k ; troncando lo sviluppo al primo termine:
( )
f x (k ) +
c)
~
df
⋅ Δ x (k ) = f
dx
[10.48]
quindi:
Δx
(k )
( )
~
f − f x (k )
=
d f dx
[10.49]
e grazie a questo si ottiene il nuovo valore di tentativo:
x (k +1) = x (k ) + Δ x (k )
[10.50]
con il quale si ritorna al punto "b)" dell'algoritmo.
( )
~
Il valore ε (k ) = f − f x (k ) prende il nome di residuo all'iterazione k -esima.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 33 di 80
Se il problema è ben condizionato e la soluzione di tentativo non è mal ipotizzata, il processo di ricerca della
soluzione è convergente (il residuo decresce ad ogni iterazione, tendendo a zero). In caso contrario il
processo può divergere (residuo crescente) oppure oscillare (il residuo assume valori ora crescenti ora
decrescenti rispetto all'iterazione precedente, senza però mai avviarsi verso la convergenza o verso una
chiara divergenza). Occorre allora accompagnare l'algoritmo con dei controlli del tipo:
-
se il processo diverge per un certo numero di iterazioni consecutive (solitamente 2÷3), si dichiara che
l'algoritmo ha fallito e se ne interrompe la prosecuzione;
-
se dopo un certo numero di iterazioni (solitamente 10÷20) la convergenza non viene raggiunta, si
dichiara che l'algoritmo ha fallito e se ne interrompe la prosecuzione.
A volte la convergenza non viene raggiunta perché la tolleranza posta è troppo piccola, e gli strumenti di
calcolo non sono in grado, per i problemi noti di approssimazione e troncamento, di portare ulteriori
miglioramenti; ma una soluzione meno precisa può essere invece trovata.
In caso di un sistema di equazioni, il problema è:
[F ([x])] = [F~ ]
[10.51]
[~]
dove [x ] e F sono vettori colonna di incognite e termini noti.
[ ( )]
[ ( ) ], saranno quindi anch'esse
La soluzione iniziale di tentativo [x ] = x 0 , come pure le successive [x ] = x
vettori colonna, come saranno vettori colonna quelli dei residui:
k
[ε( ) ] = [F~ ]− [F ([x( ) ])]
k
k
[10.52]
mentre la derivata della funzione scalare diventa qui una matrice jacobiana:
jac[F ] = [J ] è tale che:
dove
J ij =
∂Fi
∂x j
[10.53]
Fi è la i -esima funzione del sistema non lineare e x j è la j -esima incognita; le derivate sono
calcolate i corrispondenza di
[ ].
semplicemente J
(k )
[x] = [x (k ) ],
quindi potrebbe essere più opportuno scrivere
[J ([x( ) ])]
k
o
Si avrà quindi:
[F ([x( ) ])]+ [J ( ) ]⋅ [Δ x( ) ] = [F~ ]
k
k
k
[10.54]
e quindi:
[J ( ) ]⋅ [Δ x( ) ] = [ε( ) ]
k
k
k
[10.55]
Si tratta ancora di un sistema di equazioni, ma stavolta è un sistema lineare, perché la matrice jacobiana, a
ciascuna iterazione, è composta di termini costanti perché funzioni dei valori di tentativo, a tale iterazione,
delle incognite.
Questa formulazione del metodo risolutivo del problema del load-flow è detta metodo di Newton-Raphson
(N-R).
Il criterio di convergenza dovrà verificare che tutti i residui (in valore assoluto) si trovino al di sotto della
tolleranza prefissata.
Per quanto riguarda i valori iniziali delle incognite, si segue questo principio:
-
tutte le fasi incognite delle tensioni sono inizializzate al valore 0 (per i nodi di saldo le fasi non sono
incognite, e conservano per tutto il processo i valori per essi prefissati);
-
tutti i moduli incogniti delle tensioni sono inizializzati al valore 1 (per i nodi PV e di saldo i moduli non
sono incogniti, e conservano per tutto il processo i valori per essi prefissati).
Rimane il problema della soluzione del sistema lineare. Per dimensioni superiori a 4÷5 equazioni la
soluzione "a mano", anche con l'ausilio di una piccola calcolatrice palmare, non è più praticabile. Inoltre,
anche il calcolo dei residui e delle derivate è alquanto pesante. Sono quindi necessari mezzi di calcolo più
evoluti. Oggi su un normale personal computer è possibile risolvere questo problema per reti elettriche di
dimensioni molto grandi, anche di alcune migliaia di nodi. Grazie alla sparsità della matrice delle
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 34 di 80
ammettenze nodali, che si estende alla matrice jacobiana, gli elementi da memorizzare e sui quali operare
nei calcoli sono molto meno di N S2 , dove con N S si intende la dimensione del sistema. Per risolvere il
sistema non si ricorre all'inversione della matrice, operazione onerosissima (le operazioni da eseguire
sarebbero in numero proporzionale a N S3 ), anche perché per la maggior parte si farebbero operazioni su
elementi nulli; si seguono invece altre strade, delle quali la principale è quella della fattorizzazione della
matrice e della soluzione per sostituzione progressiva.
Per quando riguarda le espressioni delle derivate, queste si ottengono dalle espressioni [10.13] della
potenza attiva e reattiva. Per ogni tipo di potenza si hanno 4 diversi tipi di derivata:
-
derivata della potenza del nodo rispetto alla fase della tensione nel nodo medesimo
-
derivata della potenza del nodo rispetto alla fase della tensione di altro nodo
-
derivata della potenza del nodo rispetto al modulo della tensione nel nodo medesimo
-
derivata della potenza del nodo rispetto al modulo della tensione di altro nodo
La matrice jacobiana potrà inoltre essere suddivisa in 4 sottomatrici principali:
⎡ ⎡ ∂P ⎤
⎢⎢ ⎥
[J ] = ⎢ ⎣ ∂∂θQ ⎦
⎢⎡ ⎤
⎢ ⎢⎣ ∂θ ⎥⎦
⎣
⎡ ∂P ⎤ ⎤
⎢ ∂U& ⎥ ⎥
⎣
⎦⎥
⎡ ∂Q ⎤ ⎥
⎢ ∂U& ⎥ ⎥
⎣
⎦⎦
[10.56]
per cui il sistema ad ogni iterazione potrà essere scritto come:
⎡ ⎡ ∂P ⎤
⎢ ⎢ ∂θ ⎥
⎢⎣ ⎦
⎢ ⎡ ∂Q ⎤
⎢⎣ ⎢⎣ ∂θ ⎥⎦
[
]⎤⎥ ⎡⎢[P~ ]− [P& ( ) ]⎤⎥
⎡ ∂P ⎤ ⎤ ⎡ Δθ(k )
⎢ ∂U& ⎥ ⎥ ⎢
⎣
⎦⎥ ⋅
⎡ ∂Q ⎤ ⎥ ⎢ & (k )
⎢ ∂U& ⎥ ⎥ ⎢⎣ ΔU
⎣
⎦⎦
[
k
⎥
⎥=⎢
~
& (k ) ⎥
⎥ ⎢Q
Q
−
⎦ ⎣
⎦
[10.57]
] [] [ ]
Si nota che le derivate delle potenze rispetto alle fasi saranno sempre funzioni quadratiche dei moduli delle
tensione, mentre le derivate delle potenze rispetto ai moduli risulteranno funzioni lineari rispetto a tali moduli.
Per rendere più omogenea sia la matrice jacobiana che i termini noti, si opta per una formulazione modificata
mediante normalizzazione, del tipo:
⎡
⎢
⎢
⎢
⎢⎣
⎡ ∂P ⎤
⎢ ∂θ ⎥
⎣ ⎦
⎡ ∂Q ⎤
⎢ ∂θ ⎥
⎣ ⎦
⎡&
⎢U
⎣
⎡&
⎢U
⎣
~
∂P ⎤ ⎤ ⎡ Δθ (k ) ⎤ ⎡ P
− P& (k )
⎢
⎥
⎥
⎥
&
⎢
∂U ⎦ ⎥ ⎢
⎥=
⋅
∂Q ⎤ ⎥ ⎢ ⎡ ΔU& (k ) ⎤ ⎥ ⎢ ~
⎢
⎥ ⎢ Q − Q& (k )
∂U& ⎥⎦ ⎥⎦ ⎢ ⎢⎣ U& ⎥⎦ ⎥ ⎣
⎣
⎦
[
]
[ ] [ ]⎤⎥
⎥
⎥
⎦
[10.58]
[] [ ]
dove:
∂Pi
⎡ ∂P ⎤
vale U& i
(analogam. per il reattivo)
⎥
&
∂U& j
⎣ ∂U ⎦
-
l'elemento ij -esimo della sottomatrice ⎢U&
-
l'elemento
⎡ ΔU& (k ) ⎤
ΔU& i(k )
vale
& ⎥
U& i
⎣ U ⎦
i -esimo della sottomatrice ⎢
In tal modo il sistema [10.58] è del tutto equivalente al sistema [10.57], perché non si è fatto altro che
moltiplicare alcuni coefficienti del sistema per U& j e dividere le incognite per il medesimo valore.
Riprendendo le [10.13]:
P&i = +G& ii ⋅ U& i2 +
Q& i = − B& ii ⋅ U& i2 +
∑ U& i ⋅ U& j ⋅ (+ G& ij cos θij + B&ij sin θij )
j∈C (i )
∑ U& i ⋅ U& j ⋅ (− B&ij cos θij + G& ij sin θij )
[10.59]
j∈C (i )
le espressioni delle derivate all'iterazione k -esima sono:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
(
1C - Introduzione agli Impianti Elettrici
p. 35 di 80
)
2
∂P&i
= ∑ U& i(k ) ⋅ U& (jk ) ⋅ + B&ij cos θij(k ) − G& ij sin θij(k ) = −Q& i(k ) − B& ii ⋅ U& i(k )
∂θi j∈C (i )
∂P&i
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k )
∂θ j
(
[10.60]
)
(
)
2
2
∂P&
U& i ⋅ i = +2 ⋅ G& ii ⋅ U& i(k ) + ∑ U& i(k ) ⋅ U& (jk ) ⋅ + G& ij cos θij(k ) + B&ij sin θij(k ) = P&i (k ) + G& ii ⋅ U& i(k )
∂U& i
j∈C (i )
&
∂
P
U& i ⋅ i = U& i(k ) ⋅ U& (jk ) ⋅ + G& ij cos θij(k ) + B& ij sin θij(k )
∂U&
(
)
(
)
[10.61]
j
2
∂Q& i
= ∑ U& i(k ) ⋅ U& (jk ) ⋅ + G& ij cos θij(k ) + B&ij sin θij(k ) = + P&i (k ) − G& ii ⋅ U& i(k )
∂θi j∈C (i )
∂Q& i
∂P&
= U& i(k ) ⋅ U& (jk ) ⋅ − G& ij cos θij(k ) − B& ij sin θij(k ) = −U& i ⋅ &i
∂θ j
∂U j
(
[10.62]
)
(
)
2
2
∂Q&
U& i ⋅ i = −2 ⋅ B&ii ⋅ U& i(k ) + ∑ U& i(k ) ⋅ U& (jk ) ⋅ − B&ij cos θij(k ) + G& ij sin θij(k ) = Q& i(k ) − B&ii ⋅ U& i(k )
∂U& i
j∈C (i )
&
∂
Q
∂P&
i
U& j ⋅
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k ) = + i
∂U&
∂θ
(
)
j
[10.63]
j
Si può notare che il calcolo dei valori di potenza attiva e reattiva con i valori delle variabili di stato
all'iterazione corrente (finalizzato al calcolo dei residui) si compone di addendi che servono anche nel calcolo
delle derivate. In tal modo è possibile ottimizzare il procedimento di calcolo, riducendo il numero complessivo
di operazioni computazionali da svolgere.
Solitamente il termine:
θij = θi − θ j
è alquanto piccolo, perché gli angoli di fase tra due estremi di un componente non sono mai molto distanti
fra loro, a meno che non si tratti di una linea particolarmente lunga (o di un trasformatore con impedenza
molto elevata) e con un notevole transito di potenza attiva. Infatti per un componente serie vale:
U& − U& 2
U& 1 − U& 2
I&12 = 1
=
Z& 12 L
R&12 L + X& 12 L
[10.64]
Trascurando il termine resistivo, che per le linee in AT e per i trasformatori è molto più piccolo del termine
reattivo:
U& − U& 2
I&12 ≅ 1
jX&
[10.65]
12 L
e la potenza trasferita vale:
jθij
&* &*
&2 & &*
&2 & &
&A = U& ⋅ I&* ≅ U& ⋅ U 1 − U 2 = U1 − U 1 ⋅ U 2 = U1 − U1 ⋅ U 2 ⋅ e =
12
12
1
1
− jX& 12 L
− jX& 12 L
− jX& 12 L
U&12 − U&1 ⋅ U& 2 ⋅ cos θij + j sin θij
U& 1 ⋅ U& 2 ⋅ sin θij
U&12 − U&1 ⋅ U& 2 ⋅ cos θij
=
=
+j
X& 12 L
X& 12 L
− jX& 12 L
(
[10.66]
)
quindi:
U&1 ⋅ U& 2 ⋅ sin θij
P&12 ≅
X& 12 L
2
&
U1 − U&1 ⋅ U& 2 ⋅ cos θij U&1 ⋅ U&1 − U& 2 ⋅ cos θij
=
Q&12 ≅
X& 12 L
X& 12 L
(
Versione 1.00 - novembre 2010
)
[10.67]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 36 di 80
Quindi:
P&12 ⋅ X& 12 L
U& ⋅ U&
sin θij ≅
1
[10.68]
2
In normali condizioni di esercizio, la reattanza in p.u. è inversamente proporzionale alla potenza nominale
del componente; il prodotto tra le due grandezze raramente supera valori dell'ordine di 0.1. Le tensione in
modulo sono dell'ordine di 1 p.u.; solitamente quindi:
sin θij ≤ 0.1 ⇒ θij ≅ sin θij ⇒ θij ≤ 0.1
[10.69]
e come conseguenza:
cos θij = 1 − sin 2 θij ≥ 1 − 0.12 = 0.99 ≅ 0.995 ≅ 1
[10.70]
per cui, tenendo conto che i moduli delle tensioni sono prossimi ad 1 p.u.:
U&1 ⋅ U& 2 ⋅ sin θij sin θij ⎛ θij ⎞
⎜≅
⎟
P&12 ≅
≅ &
X& 12 L
X 12 L ⎜⎝ X& 12 L ⎟⎠
U&1 ⋅ U&1 − U& 2 ⋅ cos θij
U&1 ⋅ U&1 − U& 2
ΔU&12
Q&12 ≅
≅
≅
X& 12 L
X& 12 L
X& 12 L
(
)
(
)
[10.71]
Queste espressioni semplificate sono molto importanti dal punto di vista concettuale più che da quello
computazionale. Esse infatti esprimono un duplice concetto fondamentale nello studio degli impianti elettrici:
a)
i transiti di potenza attiva dipendono prevalentemente dalle fasi delle tensioni agli estremi dei rami
coinvolti, e solo in misura inferiore dai moduli di tali tensioni;
b)
i transiti di potenza reattiva dipendono prevalentemente dai moduli delle tensioni agli estremi dei
rami coinvolti, e solo in misura trascurabile dalle fasi di tali tensioni.
Queste affermazioni sono sicuramente valide nel caso di rete elettrica di rami con modesti valori dei rapporti
R X per le impedenze longitudinali, quindi con presenza di modesti valori di resistenza; sono invece
affermazioni meno forti, ma conservano ancora una certa validità, nel caso di reti con elevati valori del
rapporto R X .
A queste medesime conclusioni si può pervenire anche dell'analisi delle derivate per la matrice jacobiana. Si
noti per esempio come i termini:
(
∂P&
U& i ⋅ i = U& i(k ) ⋅ U& (jk ) ⋅ + G& ij cos θij(k ) + B& ij sin θij(k )
∂U& j
)
[10.72]
oppure i termini:
(
)
∂Q& i
∂P&
= U& i(k ) ⋅ U& (jk ) ⋅ − G& ij cos θij(k ) − B&ij sin θij(k ) = −U& i ⋅ i
∂θ j
∂U& j
[10.73]
siano decisamente inferiori per esempio rispetto ai termini:
(
∂P&i
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k )
∂θ j
)
[10.74]
oppure ai termini:
(
)
∂Q& i
∂P&
U& j ⋅
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k ) = + i
∂U&
∂θ
j
[10.75]
j
Infatti, nei primi, gli addendi G& ij cos θij(k ) sono piccoli per il ridotto valore della conduttanza, e gli addendi
B& ij sin θij(k ) sono piccoli per il ridotto valore della funzione seno.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 37 di 80
Nei secondi termini, invece, gli addendi G& ij sin θij(k ) sono sì trascurabili, essendo piccoli sia la conduttanza
che la funzione seno, ma gli addendi B& ij cos θij(k ) hanno valore rilevante perché la suscettanza è solitamente
grande e la funzione coseno è prossima a 1.
Ancora una volta scopriamo che se il rapporto R X è elevato, le conduttanze non sono molto più piccole
rispetto alle suscettanze, per cui quando affermato ha un valore meno stringente. Se invece il suddetto
rapporto è modesto, allora si nota che le sottomatrici:
⎡ ∂P ⎤ ⎡ & ∂Q ⎤
⎢ ∂U& ⎥ e ⎢U ∂U& ⎥
⎦
⎦ ⎣
⎣
[10.76]
del sistema [10.58]:
⎡
⎢
⎢
⎢
⎢⎣
⎡ ∂P ⎤
⎢ ∂θ ⎥
⎣ ⎦
⎡ ∂Q ⎤
⎢ ∂θ ⎥
⎣ ⎦
⎡&
⎢U
⎣
⎡&
⎢U
⎣
[] [ ]
~
∂P ⎤ ⎤ ⎡ Δθ (k ) ⎤ ⎡ P
− P& (k ) ⎤
⎥
⎢
⎥
⎥
&
⎢
⎥
∂U ⎦ ⎥ ⎢
⎥=
⋅
⎢
⎥
k
(
)
∂Q ⎤ ⎥ ⎢ ⎡ ΔU& ⎤ ⎥
~
(k ) ⎥
&
⎢
⎥
⎢
−
Q
Q
⎦
∂U& ⎥⎦ ⎥⎦ ⎢ ⎢⎣ U& ⎥⎦ ⎥ ⎣
⎦
⎣
[
]
[10.77]
[] [ ]
presentano elementi di valore modesto.
Poiché il metodo di risoluzione del problema del load-flow è comunque un metodo numerico, che procede in
maniera iterativa per approssimazioni successive, può essere ammissibile utilizzare una matrice jacobiana
approssimata. Non sono invece ammissibili semplificazioni al processo di calcolo delle potenze nodali ad
ogni iterazione e quindi di calcolo dei residui, perché lo scopo del procedimento di calcolo del load-flow è
quello di trovare la soluzione che risponda con la maggior precisione possibile ai valori imposti di potenza
iniettata nei nodi.
Una approssimazione conveniente della matrice jacobiana è quella di eliminare le suddette sottomatrici con
elementi di modesto valore, approssimando cioè a 0 tali elementi:
⎡ ⎡ ∂P ⎤
⎢ ⎢ ∂θ ⎥
⎢ ⎣ ⎦
⎢ [0]
⎢⎣
⎡&
⎢U
⎣
[] [ ]
~
⎤ ⎡ Δθ(k ) ⎤ ⎡ P
− P& (k ) ⎤
⎥
⎥ ⎢
⎥
⎥=⎢
⎥⋅⎢
⎢
⎥
(
)
k
⎢
⎥
&
∂Q ⎤ ⎥ ⎡ ΔU ⎤
~
& (k ) ⎥
⎢Q
−
Q
⎢
⎥
⎢
⎥
⎥
⎦
∂U& ⎦ ⎥⎦ ⎢ ⎣ U& ⎦ ⎥ ⎣
⎣
⎦
[0]
[
]
[10.78]
[] [ ]
Questo sistema presenta il grande vantaggio di poter essere visto come due sistemi disaccoppiati:
[
]
[ ] [P& ( ) ]
~
⎡ ∂P ⎤
(k )
= P −
⎢ ∂θ ⎥ ⋅ Δθ
⎣ ⎦
(k )
~
⎡ & ∂Q ⎤ ⎡ ΔU& ⎤
⋅
U
⎢ ∂U& ⎥ ⎢ U& ⎥ = Q −
⎦ ⎣
⎣
⎦
k
[10.79]
[] [ ]
Q& (k )
rendendo molto meno oneroso il processo di soluzione del sistema.
L'introduzione di una qualche approssimazione è accettabile, in quanto la matrice jacobiana serve solo a
determinare il tentativo successivo del metodo iterativo. Una matrice approssimata renderà il tentativo
successivo un po' meno efficace rispetto a quello ottenuto con una matrice esatta, ma se l'approssimazione
non è eccessiva tale tentativo successivo dovrebbe comunque essere più vicino alla soluzione di quanto lo
sia il tentativo corrente. L'unico effetto negativo sarà quindi un eventuale rallentamento del processo di
convergenza, cioè potrebbe essere necessaria qualche iterazione in più; inoltre la soluzione raggiunta
potrebbe essere un po' meno precisa di quella ottenuta con una matrice jacobiana esatta, cioè potrebbe
essere necessario l'utilizzo di tolleranze meno strette. Tuttavia, tali svantaggi sono solitamente compensati
dalla riduzione dell'onere computazionale del processo di soluzione del sistema matriciale conseguente
all'introduzione del disaccoppiamento. Il metodo è quindi detto di Newton-Raphson (N-R) disaccoppiato.
Una ulteriore approssimazione è quella proposta dal metodo di Stott detto anche metodo del Fast
Decoupled Load-Flow (FDLF). Nel metodo di N-R disaccoppiato le sole derivate utilizzate sono quelle
espresse dalle [10.60] e dalle [10.63]:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
(
1C - Introduzione agli Impianti Elettrici
p. 38 di 80
)
2
∂P&i
= ∑ U& i(k ) ⋅ U& (jk ) ⋅ + B&ij cos θij(k ) − G& ij sin θij(k ) = −Q& i(k ) − B& ii ⋅ U& i(k )
∂θi j∈C (i )
∂P&i
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k )
∂θ j
(
[10.80]
)
(
)
2
2
∂Q&
U& i ⋅ i = −2 ⋅ B& ii ⋅ U& i(k ) + ∑ U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k ) = Q& i(k ) − B& ii ⋅ U& i(k )
∂U& i
j∈C (i )
&
∂
Q
∂P&
i
U& i ⋅
= U& i(k ) ⋅ U& (jk ) ⋅ − B& ij cos θij(k ) + G& ij sin θij(k ) = + i
&
∂U
∂θ
(
[10.81]
)
j
j
Una prima approssimazione può essere introdotta ponendo pari a 1 tutti i termini "coseno" e pari 0 tutti i
termini "seno" moltiplicati per le conduttanze:
B& ij cos θij(k ) ≅ B& ij
G& ij sin θij(k ) ≅ 0
[10.82]
quindi gli elementi fuori diagonale:
(
)
∂P&i
= U& i(k ) ⋅ U& (jk ) ⋅ − B&ij cos θij(k ) + G& ij sin θij(k )
∂θ j
∂Q&
U& i ⋅ & i = U& i(k ) ⋅ U& (jk ) ⋅ − B&ij cos θij(k ) + G& ij sin θij(k )
∂U
(
[10.83]
)
j
diventano:
∂P&i
= − B&ij ⋅ U& i(k ) ⋅ U& (jk )
∂θ j
∂Q&
U& i ⋅ & i = − B&ij ⋅ U& i(k ) ⋅ U& (jk )
∂U j
[10.84]
Inoltre è ben noto che tutti i termini diagonali B&ii sono di valore molto elevato: se per esempio in un nodo
convergono 4 rami con impedenza longitudinale pari a:
z&12 L = 0.01 + j 0.10
allora le relative ammettenze valgono:
y&
12 L
=
1
z&12 L
=
1
0.01 − j 0.10 0.01 − j 0.10
=
≅ 0.99 − j 9.90
=
0.01 + j 0.10 0.012 + 0.102
0.0101
quindi:
b&12 L = −9.90 ≅ −10.0
e sommando per i 4 rami si ottiene:
B&ii = 4 ⋅ (− 10.0 ) = −40.0
Quindi, tenendo conto che le tensioni in modulo sono circa pari a 1 p.u., il termine − B&ii ⋅ U& i(k ) è solitamente
2
( )
di almeno un ordine di grandezza più grande (in valore assoluto) del termine Q& i k ; pertanto gli elementi
diagonali:
2
∂P&i
= −Q& i(k ) − B&ii ⋅ U& i(k ) e
∂θi
2
∂Q&
U& i ⋅ i = Q& i(k ) − B&ii ⋅ U& i(k )
∂U& i
possono essere approssimati in:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
2
∂P&i
≅ − B&ii ⋅ U& i(k )
∂θi
2
∂Q&
U& i ⋅ i ≅ − B&ii ⋅ U& i(k )
&
∂U i
p. 39 di 80
[10.85]
Il sottosistema relativo alle potenze attive della [10.79] può allora essere scritto come:
~
K − B&1, n ⋅ U&1(k ) ⋅ U& n(k ) ⎤ ⎡Δθ1(k ) ⎤ ⎡ P1 − P&1(k ) ⎤
⎥ ⎢ (k ) ⎥ ⎢ ~
(k ) ⎥
K − B& 2, n ⋅ U& 2(k ) ⋅ U& n(k ) ⎥ ⎢Δθ 2 ⎥ ⎢ P2 − P&2 ⎥
22
2
⋅
=
⎥ ⎢
⎥
⎥ ⎢
K
K
K
⎥ ⎢K ⎥ ⎢K
⎥
~
2
(
)
(
)
k
k
− B& n, 2 ⋅ U& 2(k ) ⋅ U& n(k ) K
− B& n, n ⋅ U& n(k ) ⎥⎦ ⎣⎢Δθ n ⎦⎥ ⎣⎢ Pn − P&n ⎦⎥
⎡ − B& ⋅ U& (k )2
11
1
⎢
⎢ − B& 21 ⋅ U&1(k ) ⋅ U& 2(k )
⎢
K
⎢
⎢− B& ⋅ U& (k ) ⋅ U& (k )
n
⎣ n,1 1
− B&12 ⋅ U&1(k ) ⋅ U& 2(k )
2
− B& ⋅ U& (k )
[10.86]
n è il numero totale di equazioni di potenza attiva. Dividendo ogni riga i -esima per il modulo della
(k )
relativa tensione U& i al primo e al secondo membro:
Dove
⎡ − B&11 ⋅ U&1(k )
⎢ &
& (k )
⎢ − B21 ⋅ U1
⎢
K
⎢
(k )
⎢⎣− B& n ,1 ⋅ U&1
(
(
) U& ( ) ⎤⎥
) U& ( ) ⎥
(
⎥
& (k )
~
K − B&1, n ⋅ U& n(k ) ⎤ ⎡Δθ1(k ) ⎤ ⎡ P1 − P&1(k )
⎥
⎢
⎥ ⎢~
K − B& 2, n ⋅ U& n(k ) ⎥ ⎢Δθ(2k ) ⎥ ⎢ P2 − P&2(k )
⋅
=
⎥ ⎢K ⎥ ⎢K
K
K
K
⎥ ⎢
⎥ ⎢~
− B& n , 2 ⋅ U& 2(k ) K − B& n , n ⋅ U& n(k ) ⎥⎦ ⎣⎢Δθ(nk ) ⎦⎥ ⎣⎢ Pn − P&n(k )
− B&12 ⋅ U& 2(k )
− B& 22 ⋅ U& 2(k )
1
k
k
2
)U
n
⎥
⎦⎥
quindi, associando i moduli delle tensioni (ancora presenti in tutti i gli elementi dello jacobiano) ai
corrispondenti elementi dei termini incogniti
⎡ − B&11 − B&12
⎢ &
&
⎢ − B21 − B22
⎢ K
K
⎢ &
⎢⎣− Bn ,1 − B& n , 2
Δθi(k ) ,il sistema diventa infine:
(
(
) U& ( ) ⎤⎥
) U& ( ) ⎥
(
)
~
K − B&1, n ⎤ ⎡U&1(k ) ⋅ Δθ1(k ) ⎤ ⎡ P1 − P&1(k )
⎥ ⎢
⎥ ⎢~
K − B& 2, n ⎥ ⎢U& 2(k ) ⋅ Δθ(2k ) ⎥ ⎢ P2 − P&2(k )
⋅
=
⎥ ⎢K
K
K ⎥ ⎢K
⎥ ⎢
⎥ ⎢~
K − B& n, n ⎥⎦ ⎢⎣U& n(k ) ⋅ Δθ(nk ) ⎥⎦ ⎢⎣ Pn − P&n(k )
1
k
k
2
[10.87]
⎥
⎥
U& n(k ) ⎥⎦
Si può procedere in analogamente per il sistema di equazioni di potenza reattiva da cui:
⎡ − B&11 − B&12
⎢ &
&
⎢ − B21 − B22
⎢ K
K
⎢ &
⎢⎣− Bm,1 − B& m , 2
Dove
K
K
K
K
~&
⎡⎛ Q
(k )
⎜ 1 − Q&1 ⎞⎟
⎢
⎠
⎝
(
)
k
&
&
− B1, m ⎤ ⎡ΔU1 ⎤ ⎢ ~
&
(k ) ⎞
⎛
&
⎥
⎢
⎥
− B& 2, m ⎥ ⎢ΔU& 2(k ) ⎥ ⎢⎜⎝ Q2 − Q2 ⎟⎠
⋅
=⎢
K ⎥ ⎢K ⎥ ⎢K
⎥ ⎢
⎥
− B& m, m ⎦⎥ ⎣⎢ΔU& m(k ) ⎦⎥ ⎢ ~&
⎢⎛ Q − Q& (k ) ⎞
m ⎟
⎢⎣⎜⎝ m
⎠
U&1(k ) ⎤⎥
⎥
U& 2(k ) ⎥
⎥
⎥
⎥
(k ) ⎥
&
Um ⎥
⎦
[10.88]
m è il numero totale di tali equazioni.
Quello che si nota immediatamente è che entrambi gli jacobiani (approssimati) sono ora matrici costanti, non
più dipendenti dal valore delle tensioni (in modulo e fase) alle iterazioni attuali. Le matrici possono quindi
essere invertite o fattorizzate una volta per tutte all'inizio del processo iterativo, ottenendo una drastica
riduzione del numero complessivo di operazioni computazionali, tale da giustificare l'eventuale maggior
numero di iterazioni necessarie a raggiungere la convergenza.
I due sottosistemi possono essere scritti in forma sintetica come:
[
]
− [B ] ⋅ [ΔU& ( ) ]
'
− [B ] ⋅ U& (k ) ⋅ Δθ(k )
"
k
~&
= ⎡⎛⎜ P − P& (k ) ⎞⎟ U& (k ) ⎤
⎥⎦
⎢⎣⎝
⎠
~&
= ⎡⎢⎛⎜ Q − Q& (k ) ⎞⎟ U& (k ) ⎤⎥
⎝
⎠
⎣
⎦
[10.89]
dove le sottomatrici [B ] e [B ] sono ottenute dalla matrice delle suscettanze nodali (parte immaginaria della
matrice delle ammettenze nodali) semplicemente eliminando:
'
"
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 40 di 80
-
per lo jacobiano delle equazioni di potenza attiva, le righe e le colonne relative ai nodi in cui non sono
presenti tali tipi di equazioni, vale a dire i nodi di saldo;
-
per lo jacobiano delle equazioni di potenza reattiva, le righe e le colonne relative ai nodi in cui non sono
presenti tali tipi di equazioni, vale a dire i nodi di saldo e i nodi "PV".
Nel calcolare queste sottomatrici, si parta sempre dalla matrice delle ammettenze; non si commetta l'errore
di costruirle direttamente per ispezione sulle sottoreti ottenute tenendo in considerazione solo i nodi con
equazioni di potenza attiva e solo i nodi di potenza reattiva rispettivamente.
10.2 - Esempio ed esercizi
10.2.1 - Soluzione di una rete radiale
Sia data la seguente rete elettrica radiale, come in figura:
Bus 0
Bus 1
3 km
Bus 2
5 km
V=15.6 kV
P=6 MW
Q=3 Mvar
Bus 3
4 km
P=2 MW
Q=1 Mvar
P=3 MW
Q=2 Mvar
fig. 10.1
La tensione nominale dei nodi è 15 kV. La linea dorsale presenta i seguenti parametri:
r = 0.100 Ω km
x = 0.090 Ω km
Calcolare la tensione in tutti i nodi.
Risoluzione
Si utilizzerà dapprima la formula approssimata della c.d.t. per trovare una soluzione di tentativo da usare
come punto di partenza del metodo iterativo esatto.
Le resistenze nelle varie tratte sono date dal prodotto dei parametri kilometrici per la lunghezza in km:
RT 1 = 0.300 Ω
X T 1 = 0.270 Ω
RT 2 = 0.500 Ω
X T 2 = 0.450 Ω
RT 3 = 0.400 Ω
X T 3 = 0.360 Ω
Le potenze in transito su ogni tratta valgono:
PT 1 = 11 MW QT 1 = 6 Mvar
PT 2 = 5 MW
QT 2 = 3 Mvar
PT 3 = 3 MW
QT 3 = 2 Mvar
in questi valori sono state trascurate le perdite.
Si utilizzerà la formula [10.28] in valori assoluti:
ΔV12 = V1 − V2 ≅
R ⋅ PT 1 + X ⋅ QT 1
V1
Tensione sul nodo 1. Per questo nodo vale
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
RTi ⋅ PTi + X Ti ⋅ QTi = 0.300 ⋅ 11 + 0.270 ⋅ 6 = 4.920
ΔV01 =
4.920
= 0.315kV
15.600
⇒ V1(1) = V0 − ΔV01 = 15.285kV
Tensione sul nodo 2. Per questo nodo vale
RTi ⋅ PTi + X Ti ⋅ QTi = 0.500 ⋅ 5 + 0.450 ⋅ 3 = 3.850
ΔV12 =
3.850
= 0.252kV
15.285
⇒ V2(0 ) = V1(0 ) − ΔV12 = 15.033kV
Tensione sul nodo 3. Per questo nodo vale
RTi ⋅ PTi + X Ti ⋅ QTi = 0.400 ⋅ 3 + 0.360 ⋅ 2 = 1.920
ΔV23 =
1.920
= 0.128 kV
15.033
⇒ V3(0 ) = V2(0 ) − ΔV23 = 14.905kV
Si procede poi con il Metodo iterativo per trovare una soluzione esatta.
Come tensione di partenza al nodo finale si utilizza quella trovata con la formula approssimata:
V3(0 ) = 14.905kV
Potenza fluente nella tratta 3, misurata al nodo a valle:
PT 3 + jQT 3 = 3 + j 2
Corrente nella tratta 3 (dal nodo "2" al nodo "3"):
(0 )
IT3
*
⎛ P + jQ ⎞
3 − j2
P − jQT 3
= ⎜⎜ T 3 (0 )T 3 ⎟⎟ = T 3
=
= 0.1162 − j 0.0775kA
(
0)
3 ⋅ V3
3 ⋅14.905
⎝ 3 ⋅U 3
⎠
(0 )
IT(03) = I T 3 = 0.1162 − j 0.0775 = 0.1397kA
Tensione al nodo 2:
14.905
+ (0.400 + j 0.360) ⋅ (0.1162 − j 0.0775) =
3
= 8.605 + 0.074 + j 0.011 = 8.680 + j 0.011
U 2 = U 3 + (RT 3 + jX T 3 ) ⋅ I T 3 =
(0 )
(0 )
(0 )
U 2(0 ) = 8.680 + j 0.011 = 8.680 kV
V2(0 ) = 3 ⋅ U 2(0 ) = 15.034 kV
Perdite nella tratta 3 (tratta dal nodo "2" al nodo "3"):
(0 )
(0 )
2
2
Ploss
, 3 + jQloss , 3 = 3 ⋅ (0.400 + j 0.360) ⋅ IT 3 = (0.400 + j 0.360) ⋅ 0.1397 = 0.0234 + j 0.0211
Potenza fluente nella tratta 2 (dal nodo "1" al nodo "2"), misurata al nodo a valle:
(0 )
(0 )
PT(02 ) + jQT(02) = PT 3 + jQT 3 + PC 2 + jQC 2 + Ploss
, 3 + jQloss , 3 =
= 3 + j 2 + 2 + j1 + 0.0234 + j 0.0211 = 5.023 + j 3.021
Corrente nella tratta 2 (dal nodo "1" al nodo "2"):
(0 )
IT2
*
⎛ P (0 ) + jQ (0 ) ⎞
P (0 ) − jQT(02) 5.023 − j 2.021
= ⎜⎜ T 2 (0 ) T 2 ⎟⎟ = T 2
=
= 0.1929 − j 0.1160 kA
3 ⋅ V2(0 )
3 ⋅15.034
⎝ 3 ⋅U 2
⎠
(0 )
IT(02) = I T 2 = 0.1929 − j 0.1160 = 0.2251 kA
Tensione al nodo 1:
Versione 1.00 - novembre 2010
A.A. 2010-2011
p. 41 di 80
G. Pasini
(0 )
Corso di Impianti Elettrici Industriali
(0 )
(0 )
U 1 = U 2 + (RT 2 + jX T 2 ) ⋅ I T 2 =
1C - Introduzione agli Impianti Elettrici
p. 42 di 80
15.034
+ (0.500 + j 0.450) ⋅ (0.1929 − j 0.1160) =
3
= 8.680 + 0.147 + j 0.029 = 8.828 + j 0.029
U1(0 ) = 8.828 + j 0.029 = 8.829 kV
V1(0 ) = 3 ⋅ U1(0 ) = 15.291 kV
Perdite nella tratta 2 (tratta dal nodo "1" al nodo "2"):
(0 )
(0 )
2
2
Ploss
, 2 + jQloss , 2 = 3 ⋅ (0.500 + j 0.450) ⋅ I T 2 = (0.500 + j 0.450) ⋅ 0.2251 = 0.0760 + j 0.0684
Potenza fluente nella tratta 1 (dal nodo "0" al nodo "1"), misurata al nodo a valle:
(0 )
(0 )
PT(10 ) + jQT(01) = PT(02) + jQT(02) + PC1 + jQC1 + Ploss
, 2 + jQloss , 2 =
= 5.023 + j 3.021 + 6 + j 3 + 0.0760 + j 0.0684 = 11.099 + j 6.089
Corrente nella tratta 1 (dal nodo "0" al nodo "1"):
(0 )
I T1 =
PT(10 ) + jQT(01) PT(10 ) − jQT(01) 11.099 − j 6.089
=
=
= 0.4191 − j 0.2299kA
3 ⋅ U1(0 )
3 ⋅ V1(0 )
3 ⋅ 15.291
(0 )
IT(01) = I T 1 = 0.4191 − j 0.2299 = 0.4780kA
Tensione al nodo 0:
15.291
+ (0.300 + j 0.270 ) ⋅ (0.4191 − j 0.2299 ) =
3
= 8.680 + 0.188 + j 0.044 = 9.016 + j 0.044
(0 )
(0 )
(0 )
U 0 = U 1 + (RT 1 + jX T 1 ) ⋅ I T 1 =
U 0(0 ) = 9.016 + j 0.044 = 9.016kV
V0(0 ) = 3 ⋅ U 0(0 ) = 15.617kV
Si è quindi trovata una tensione al nodo di partenza della dorsale pari 15.617 kV anziché i 15.600 kV
effettivi. La tensione di tentativo del nodo finale era quindi superiore a quella corretta: era infatti stata
calcolata con il metodo della formula approssimata; si nota però che l'errore è piccolo: 0.017 kV su 15.600
kV, pari quindi allo 0.108%. Per molte applicazioni questo errore è più che accettabile, anche perché
solitamente sono ben maggiori le incertezza nei dati disponibili: parametri delle linee, valori dei carichi,
valore dalla tensione al nodo di partenza.
Ai soli fini didattici può però essere interessante reiterare per trovare una soluzione ancora più precisa. Tale
calcolo viene solo impostato, lasciando al lettore l'onere di terminarlo.
Reiterazione del metodo
Per prima cosa occorre determinare la nuova tensione di tentativo del nodo finale:
V&
15.600
V&3(1) = V&3(0 ) ⋅ (00 ) = 14.905 ⋅
= 14.889kV
15.617
V&
3
Quindi si riparte:
Potenza fluente nella tratta 3, misurata al nodo a valle:
PT 3 + jQT 3 = 3 + j 2
Corrente nella tratta 3:
(1)
IT3
*
⎛ P + jQ ⎞
P − jQT 3
3 − j2
= ⎜⎜ T 3 (1) T 3 ⎟⎟ = T 3
=
= 0.1163 − j 0.0776 kA
(
1)
3 ⋅ V3
3 ⋅14.889
⎝ 3 ⋅U 3
⎠
(1)
IT(13) = I T 3 = 0.1163 − j 0.0776 = 0.1398kA
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 43 di 80
etc.
10.2.2 - Esercizi proposti
Si ripeta l'esercizio precedente ma ipotizzando:
a)
che i carichi abbiano valore doppio rispetto a quelli indicati
b)
(con i carichi originali) che le lunghezze delle tratte siano doppie rispetto a quelle indicate
Come verifica che procedimento e calcoli sono stati eseguiti correttamente, si riporta la soluzione definitiva
sia dell'esercizio precedente che in quelli proposti "a)" e "b)". La soluzione è stata trovata per via diversa da
quelle indicate, vale a dire con un calcolo di load-flow, e con tolleranze molto strette (errori nei residui
inferiori a 1 kW, 1 kvar). I valori di tensione sono espressi in kV.
nodo
esercizio prec.
"a)"
"b)"
"0"
15.600
15.600
15.600
"1"
15.274
14.924
14.924
"2"
15.016
14.381
14.382
"3"
14.887
14.109
14.110
Si può notare come i casi "a)" e "b)" diano risultati quasi identici. Perché?
In entrambi i casi "a)" e "b)" il nodo finale della dorsale presenta una tensione oltre (al di sotto de) il -5%
rispetto alla tensione nominale; una simile tensione o, analogamente, una oltre (al di sopra de) il +5%, viene
ritenuta non accettabile per un buon funzionamento degli impianti.
Al di là del fatto che questi limiti siano ±5% anziché un altro valore, perché oltre una certa soglia si ritiene
che le tensioni non siano più accettabili?
Quali contromisure si potrebbero prendere per evitare queste violazioni? Per tentare una risposta, porsi nella
mentalità del progettista di impianti, e quindi ipotizzare di avere una certa libertà di azione o, quantomeno, di
proposta.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 44 di 80
11 - Rifasamento
11.1 - Elementi di teoria
11.1.1 - Alcune considerazioni sulla potenza reattiva
Un carico elettrico, qualunque sia la sua natura, è sempre destinato a produrre un effetto utile per l'uomo,
trasformando la potenza da elettrica a meccanica, termica, luminosa, etc.; di fatto quello che interessa è la
fruibilità dell'energia nella sua forma trasformata, mentre l'energia sotto forma elettrica è raramente di utilizzo
diretto.
Risulta quindi chiaro che quello che conta, ai fini dell'utilizzo, è l'energia ottenibile, pari all'integrale nel tempo
della potenza elettrica istantanea, pari a sua volta all'integrale della sola potenza elettrica attiva. La potenza
reattiva non produce benefici ai fini dell'utilizzo, in quando ad essa non è associata alcuna forma di energia
permanente, ma solo un continuo palleggiarsi avanti e indietro di una modesta quantità di energia.
La potenza reattiva non è quindi necessaria ai fini dell'utilizzo finale, ma non è eliminabile perché è diretta
conseguenza della presenza nel sistema di induttanze e capacità talora non volute ma non eliminabili, talora
invece create appositamente per altri fini (esempio tipico: le induttanze di dispersione di un trasformatore
sono a volte aumentate, anche sensibilmente, rispetto al valore naturale per limitare le correnti di
cortocircuito in caso di guasto nel sistema).
Normalmente nei sistemi elettrici a frequenza industriale gli effetti induttivi sono prevalenti rispetto a quelli
capacitivi, per cui ai carichi è quasi sempre associata una potenza reattiva di tipo induttivo.
Una inversione rispetto a questo si trova nei sistemi costituiti da linee in altissima tensione. Le linee sono
caratterizzate da 3 parametri elettrici fondamentali: resistenza e induttanza serie, capacità derivata.
Indicando con L l'induttanza e con C la capacità, per ogni tratto infinitesimo di lunghezza dl della linea si
avrà un assorbimento di potenza reattiva dato da due componenti:
dQL = 3 ⋅ ωL ⋅ I 2 ⋅ dl
[11.1]
dQC = −3 ⋅ ωC ⋅ U 2 ⋅ dl = −ωC ⋅ V 2 ⋅ dl
dove il componente dovuto alla capacità è con segno negativo perché si tratta di potenza reattiva generata e
non assorbita. Soprattutto nelle ore notturne queste linee sono poco cariche, per cui la corrente è modesta
mentre la tensione rimane sempre prossima ai valori nominali (è anzi più elevata che nelle ore diurne perché
il minor carico comporta minori cadute di tensione), quindi l'effetto capacitivo prevale su quello induttivo, e la
linea si trova quindi a generare potenza reattiva anziché dissiparne. Il fenomeno è molto rilevante soprattutto
nei sistemi con tensioni molto elevate e linee molto lunghe, come è il caso dei sistemi ex-sovietici, cileno,
argentino, dove sono presenti linee a 700 kV lunghe migliaia di km.
11.1.2 - Effetti indesiderati del trasporto di potenza reattiva
Se una linea elettrica (sia essa in cavo oppure aerea) deve alimentare un carico che assorba un potenza
P + jQ , allora la corrente in essa fluente sarà (formula valida per un sistema trifase):
I=
P + jQ
[11.2]
3 ⋅V
dove la tensione è quella dell'estremo di arrivo della linea.
Come conseguenza le perdite per effetto Joule sulla linea medesima valgono:
Pdiss = 3 ⋅ R ⋅ I 2 = 3 ⋅ R ⋅
P2 + Q2
P2 + Q2
=
⋅
R
3 ⋅V 2
V2
[11.3]
dove R è la resistenza della linea; inoltre la caduta di tensione sulla linea (utilizzando la formula
approssimata) è data da:
ΔV =
R ⋅ P + X ⋅Q
V
Versione 1.00 - novembre 2010
[11.4]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 45 di 80
dove X è la reattanza della linea.
Si nota quindi che la presenza di potenza reattiva:
a)
aumenta sensibilmente le perdite per effetto Joule sulle linee di trasporto;
b)
se la potenza reattiva assorbita del carico è positiva (potenza reattiva induttiva), la caduta di tensione
sulla linea di trasmissione aumenta sensibilmente; se tale potenza reattiva è negativa (potenza reattiva
capacitiva), tale c.d.t. potrebbe essere negativa (tensione all'arrivo superiore a quella in partenza, con
possibili sovratensioni pericolose); normalmente i carichi sono ohmico-induttivi, quindi si ha una c.d.t.
effettiva (tensione all'arrivo minore che in partenza).
Si può anche notare che l'effetto "b)" (con potenza reattiva assorbita positiva) produce un ulteriore, seppure
modesto, aumento dell'effetto "a)", in quanto una tensione minore al denominatore della [11.3] comporta un
aumento del valore delle perdite.
Si può quindi concludere che la potenza reattiva è un fenomeno indesiderato perché aumenta le perdite e
amplifica le c.d.t., con conseguente diminuzione dell'efficienza del sistema e peggioramento della qualità del
servizio fornito all'utente.
Occorre quindi fare in modo di ridurre la presenza di potenza reattiva nei sistemi elettrici.
11.1.3 - Contromisure per ridurre l'incidenza della potenza reattiva
Il modo più semplice e funzionale per ottenere questa riduzione è quello di compensare l'assorbimento di
potenza reattiva ponendo in serie o in parallelo ai carichi, alle linee, etc. dei componenti che assorbano
potenza reattiva con segno opposto a quello dovuto all'assorbimento naturale, ottenendo così una azione
compensativa. Tipicamente, in caso di carichi ohmico-induttivi vengono posti in parallelo ai carichi delle
capacità, mentre nel caso delle lunghe linee in altissima tensione si compensa la produzione di potenza
reattiva ponendo dei reattori in derivazione a intervalli regolari lungo la linea.
E' possibile anche la compensazione serie, ponendo cioè condensatori (o induttori) in serie ai carichi o alle
linee, anziché in derivazione. Questo tecnica è più diffusa nelle reti americane, mentre è poco usata in
Europa, in quando richiede una continua regolazione. Infatti nel caso di compensatori derivati la potenza
reattiva è proporzionale al quadrato della tensione, che rimane sempre in un intorno limitato di 1 p.u., ed è
quindi quasi costante, mentre nei dispositivi serie la potenza reattiva è proporzionale al quadrato della
corrente, che varia entro un ampia gamma di valori nell'arco della giornata. Inoltre è più facile
l'amplificazione di armoniche e quindi di disturbi nella rete o l'instaurarsi di fenomeni oscillatori o di fenomeni
di risonanza, a volte non solo di tipo elettrico ma elettromeccanico (con le macchine rotante presenti in rete),
che possono portare a conseguenze anche molto pericolose per l'integrità del sistema. Ben noto (anche se
non di banale comprensione) il fenomeno della risonanza subsincrona, che alcuni decenni or sono portò alla
rottura dell'albero di un generatore di grande potenza negli Stati Uniti, e che richiese alcuni anni per essere
compreso a fondo e per arrivare alla formulazione delle contromisure di protezione da prendere perché simili
eventi non si presentassero ancora in futuro.
Nell'ambito di questa esercitazione verrà trattata la sola compensazione derivata.
Questi dispositivi di compensazione possono essere fissi (sempre inseriti) oppure inseribili/disinseribili da
parte dell'utente o, nei casi più sofisticati, regolabili in modo continuo o a scalini, in maniera manuale o
automatica, in modo da ottenere sempre una compensazione ottimale. In passato, per sistemi elettrici di
notevoli dimensioni (reti di trasmissione) venivano usati - non solo ai fini del rifasamento, ma più in generale
per la regolazione della potenza reattiva e quindi della tensione nel sistema elettrico - anche alternatori privi
di motore primo (compensatori sincroni), posti in sincronismo sul sistema elettrico, con la sola funzione di
assorbire la potenza reattiva in esubero oppure di fornire quella mancante, agendo sull'eccitazione della
macchina; alcune di queste macchine sono ancora in servizio, ma si tende ad eliminarle perché sono
parecchio dissipative (il sistema di eccitazione assorbe potenza dal sistema, come pure viene dissipata
notevole potenza negli avvolgimenti statorici) e richiedono parecchia manutenzione anche per la presenza di
parti in movimento. Negli ultimi anni il notevole sviluppo dell'elettronica di potenza ha permesso lo sviluppo di
dispositivi statici in grado sia di assorbire sia di produrre potenza reattiva entro un'ampia gamma di valori,
con facilità e prontezza di regolazione.
Poiché:
Q = 3 ⋅ V ⋅ I ⋅ sin ϕ
[11.5]
dove ϕ è l'angolo tra il fasore della tensione (valore di fase) e quello della corrente, allora l'azione di
compensazione, avendo lo scopo di eliminare o quantomeno ridurre la potenza reattiva, farà in modo di
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 46 di 80
azzerare o ridurre il termine sin ϕ , cioè di eliminare o ridurre la componente di corrente in quadratura
rispetto alla tensione; farà quindi in modo che tensione e corrente siano il più possibile in fase tra loro. Per
tale ragione l'azione di compensazione viene chiamata rifasamento.
Un valore modesto o nullo del termine sin ϕ comporta che il valore del termine cos ϕ sia prossimo o pari a
1. Il termine cos ϕ , chiamato anche fattore di potenza, è quindi usato come indice di quanto la potenza
reattiva sia presente nel sistema (in relazione alla potenza attiva in gioco). Un sistema con cos ϕ prossimo
ad 1 sta funzionando con bassi valori di potenza reattiva, e quindi è da considerarsi ottimale da punto di
vista del problema che si sta trattando. Si noti che:
sin ϕ = ± 1 − cos 2 ϕ
[11.6]
Q sin ϕ ± 1 − cos 2 ϕ
=
=
P cos ϕ
cos ϕ
Le società di distribuzione dell'energia elettrica in bassa e media tensione (ENEL, ma anche le varie Aziende
Locali) solitamente impongono agli utenti che i loro carichi abbiano un cos ϕ non inferiore a 0.9. Con tale
vincolo:
sin ϕ ≤ 1 − 0.9 2 = 0.436
[11.7]
Q 0.436
≤
= 0.484
0.9
P
quindi, benché il valore 0.9 sembri molto elevato, in realtà consente di avere una potenza reattiva che sia
quasi il 50% della potenza attiva (questa è una conseguenza della non linearità delle funzioni
trigonometriche). Per gli impianti di dimensioni medio-grandi, la società di distribuzione installa non solo dei
contatori di energia (che indicano il consumo in kWh o MWh), ma anche dispositivi che misurano il consumo
di potenza reattiva (l'integrale nel tempo non è una energia, come ben noto, ma il valore di Q(t ) può
comunque essere integrato, fornendo una grandezza in kvarh o Mvarh) e, quando il consumo di reattivo
superi certe soglie, la società si riserva di far pagare all'utente una penale.
La maggior parte dei dispositivi in BT presenti sul mercato (lampade, elettrodomestici, etc.) sono costruiti in
modo tale da rispettare questo vincolo (se necessario contengono al loro interno dispositivi di rifasamento). I
dispositivi in MT, e soprattutto i motori asincroni così comuni negli impianti industriali, spesso funzionano
invece con fattori di potenza inferiori a 0.9, soprattutto se non sono a pieno carico. In tal caso il gestore
dell'impianto dovrà valutare se sia più conveniente pagare delle penali oppure installare (e gestire!) dei
dispositivi di rifasamento che riportino il fattore di potenza entro limiti accettabili. Il calcolo è un tipico calcolo
tecnico-economico, in cui si confrontano i costi della penale con quelli di ammortamento e gestione del
sistema di rifasamento. A volte può essere conveniente un rifasamento a valori di fattore di potenza inferiori
a 0.9, riducendo i costi del sistema di rifasamento e pagando delle penali ridotte.
In alcuni casi, infine, è interesse dell'utente rifasare comunque, a prescindere dalle penali, perché la
presenza di linee in MT di lunghezza non trascurabile rende rilevanti i fenomeni di c.d.t. e dell'aumento delle
perdite. Anche in questo caso occorre valutare con un calcolo tecnico-economico quale sia il
dimensionamento ottimale dei dispositivi preposti al rifasamento. Raramente il rifasamento a fattore di
potenza = 1 risulta conveniente o necessario, solitamente si rifasa a valori di cos ϕ pari a 0.90÷0.95.
Infine occorre precisare che il rifasamento può essere concentrato o distribuito.
Nel caso di rifasamento distribuito, ogni singolo carico ha il suo dispositivo di rifasamento; nel caso di
rifasamento concentrato, esiste un unico dispositivo di rifasamento (oppure pochi dispositivi, comunque non
uno per ogni carico), posto al termine della lunga linea che trasporta l'energia all'insieme dei carichi, oppure
posto in posizione baricentrica tra i vari carichi.
Il rifasamento distribuito è ovviamente il sistema ideale dal punto di vista dell'efficienza, tuttavia presenta
costi iniziali notevoli e maggiore difficoltà di gestione. Il rifasamento concentrato è invece meno efficiente (i
singoli tratti di linea dal dispositivo unico ai singoli carichi trasportano ancora elevate quantità di potenza
reattiva), ma presenta minori costi iniziali ed è di più facile gestione.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 47 di 80
11.1.4 - Metodo di calcolo
Una volta che sia noto il valore del fattore di potenza che si desidera raggiungere, il dimensionamento del
dispositivo di rifasamento è un calcolo relativamente semplice, se tale dispositivo è un normale
condensatore o induttore derivato.
Si considerano due casi principali:
a)
carico di tipo lineare (ad impedenza costante)
b)
carico di tipo P,Q (P e Q costanti anche al variare della tensione, purché la variazione sia contenuta in
un range limitato).
Nel caso "a)" il calcolo è molto semplice. Sia:
Z = R + jX
l'impedenza del carico, da cui l'ammettenza:
Y = G + jB =
1
1
=
=
Z R + jX
R − jX
[11.8]
R2 + X 2
In questo caso vale:
P + jQ =
V2
V2
=
=V 2
*
R − jX
Z
R + jX
2
R +X
2
= V 2 ⋅ (G − jB )
[11.9]
per cui:
Q X −B
= =
P R
G
tan ϕ =
[11.11]
come pure:
R
cos ϕ =
Sia
=
R2 + X 2
G
[11.12]
G2 + B2
cosϕ N il nuovo fattore di potenza voluto. Allora occorrerà aggiungere alla suscettanza propria del carico
una ulteriore suscettanza Brif tale che:
(
− B + Brif
G
(noto
) = tan ϕ
cosϕ N , è immediato ricavare tan ϕ N ); oppure:
G
2
[11.13]
N
(
G + B + Brif
)
2
= cos ϕ N
[11.14]
Ottenuta dal calcolo tale Brif , se essa è positiva allora il dispositivo dovrà essere un condensatore:
C=
Brif
[11.15]
ω
mentre se è negativa dovrà essere un induttore:
L=
−1
ω ⋅ Brif
[11.16]
(le formule [11.15] e [11.16] sono valide per condensatori o induttori disposti a stella; per elementi disposti a
triangolo è facile calcolare le formule corrispondenti).
Nel caso "b)" il calcolo è solo un poco più complesso. Infatti, non essendo nota a priori la tensione di
funzionamento del carico, il valore della suscettanza di rifasamento non può essere determinato in maniera
diretta.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 48 di 80
Si indichi con Qrif la potenza reattiva assorbita dal dispositivo di rifasamento. Il carico rifasato assorbirà
allora una potenza reattiva complessiva pari a:
Q + Qrif
[11.17]
e quindi dovrà essere:
Q + Qrif
P
= tan ϕ N
[11.18]
(noto cos ϕ N , è immediato ricavare tan ϕ N ). Poiché l'azione di rifasamento deve ridurre il valore assoluto
della potenza reattiva, in generale Qrif avrà segno opposto rispetto a Q . Con il nuovo valore complessivo di
potenza reattiva si può calcolare il nuovo valore di tensione sul carico (con la formula approssimata per la
c.d.t. o con il metodo esatto per approssimazioni successive); con tale valore di tensione Vrif è facile
calcolare:
Brif =
− Qrif
[11.19]
Vrif2
e con le formule [11.15] e [11.16] calcolare la capacità o l'induttanza.
Attenzione!
nel caso di carichi "P,Q" al variare della tensione di esercizio il valore della Q del carico non
cambia, mentre cambia il valore della potenza reattiva del dispositivo di rifasamento, quindi il
valore del fattore di potenza cambia. Può essere opportuno, a vantaggio di sicurezza, non
utilizzare la tensione calcolata Vrif ma la minima tensione prevista su quel carico:
Brif =
− Qrif
[11.20]
2
Vmin
con tale scelta, nel caso di tensioni superiori alla minima, la compensazione sarà maggiore migliorando
ulteriormente il fattore di potenza rispetto al minimo cosϕ N previsto. Bisogna però evitare che la
compensazione vada oltre il completo annullamento della potenza reattiva assorbita dal carico, facendo così
assorbire al carico rifasato una potenza reattiva di segno opposto all'originale, ottenendo un effetto
indesiderato. Se per esempio cos ϕ N = 1 , allora l'utilizzo della formula [11.20] non è consigliabile perché con
tensioni superiori alla minima si ha sicuramente l'inversione del segno della potenza reattiva
complessivamente assorbita.
11.2 - Esempi ed esercizi
11.2.1 - Esempio 1
Un carico è composto da una resistenza da 12 Ω in serie con una reattanza induttiva da 16 Ω. Calcolare il
fattore di potenza e rifasare a cos ϕ N = 0.95 . Il sistema è a 50 Hz.
Risoluzione
Il fattore di potenza è dato da:
tan ϕ =
X 16 4
⎛4⎞
=
= = 1.333 ⇒ ϕ = arctan⎜ ⎟ = 0.9273 rad ⇒ cos ϕ = 0.6
R 12 3
⎝3⎠
L'ammettenza del carico è data da:
R
12
12
=
=
= 0.03 S
2
144 + 256 400
R +X
−X
− 16
− 16
B= 2
=
=
= −0.04 S
2
144 + 256 400
R +X
G=
2
Per avere cos ϕ N = 0.95 occorre che sia:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
tan ϕ N =
(
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 49 di 80
sin ϕ N
1 − 0.952
=
= 0.3287
cos ϕ N
0.95
− B + Brif
G
) = tan ϕ
N
= 0.3287 ⇒ B + Brif = −0.3287 ⋅ G = −0.00986 S
Brif = −0.00986 − B = −0.00986 + 0.04 = 0.03014 S ⇒ C =
Brif
ω
= 95.937 μF
11.2.2 - Esempio 2
Sia dato il sistema elettrico a linee aeree in figura, dove la tensione nominale è 20 kV e la frequenza è di 50
Hz. Il nodo "0" è a potenza infinita.
Nodo 0
Nodo 1
6 km
20.8 kV
Nodo 2
3 km
4 MW
3 Mvar
Nodo 3
2 km
2 MW
1 Mvar
3 MW
2 Mvar
fig. 11.1
r = 0.100 Ω km
x = 0.300 Ω km
Si calcolino:
a)
i valori delle capacità in tutti i nodi di carico per ottenere su ogni carico un fattore di potenza pari a 0.9;
b)
i valori delle capacità in tutti i nodi di carico per ottenere su ogni carico un fattore di potenza pari a 1.0;
c)
le perdite nel sistema di trasmissione nella configurazione originale e nelle configurazioni rifasate.
Risoluzione
La risoluzione del problema richiede il calcolo delle tensioni in tutti i nodi di carico. In questo esercizio si
procederà utilizzando la formula approssimata per la c.d.t.:
ΔV =
R ⋅ P + X ⋅Q
r ⋅ P + x ⋅Q
=l⋅
V
V
lasciando al lettore il compito di rifare i calcoli con metodi più precisi.
Tratta n° 1
P = 9 MW
ΔV = 6 ⋅
Q = 6 Mvar
0.1 ⋅ 9 + 0.3 ⋅ 6
= 0.779kV ;
20.8
V1 = V0 − ΔV = 20.800 − 0.779 = 20.021kV
Tratta n° 2
P = 5 MW
ΔV = 3 ⋅
Q = 3 Mvar
0.1 ⋅ 5 + 0.3 ⋅ 3
= 0.210kV ;
20.021
Versione 1.00 - novembre 2010
V2 = V1 − ΔV = 20.021 − 0.210 = 19.811kV
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
Tratta n° 3
P = 3 MW
ΔV = 2 ⋅
Q = 2 Mvar
0.1 ⋅ 3 + 0.3 ⋅ 2
= 0.091kV ;
19.811
V2 = V1 − ΔV = 19.811 − 0.091 = 19.720kV
Le correnti nelle varie tratte sono date da:
I1 =
9 + j6
3 ⋅ 20.021
= 0.312 kA ;
5 + j3
I2 =
3 ⋅ 19.811
= 0.170 kA ;
I3 =
3 + j2
3 ⋅ 19.720
= 0.106 kA
e quindi le perdite complessive sono pari a:
(
= 3 ⋅ (6 ⋅ 0.3 ⋅ I
)
+ 2 ⋅ 0.3 ⋅ I ) = 0.623 Mvar
Ploss = 3 ⋅ 6 ⋅ 0.1 ⋅ I12 + 3 ⋅ 0.1 ⋅ I 22 + 2 ⋅ 0.1 ⋅ I 32 = 0.208 MW
Qloss
2
1
+ 3 ⋅ 0.3 ⋅ I 22
2
3
Rifasando a cos ϕ N = 0.9 i carichi rifasati dovranno valere:
Q
= tan ϕ N = 0.484
P
quindi:
Q1′ = 0.484 ⋅ P1 = 1.937 Mvar
da cui:
Q1, rif = Q1′ − Q1 = 1.937 − 3.000 = −1.063 Mvar
Q2′ = 0.484 ⋅ P2 = 0.969 Mvar
da cui:
Q2, rif = Q2′ − Q2 = 0.969 − 1.000 = −0.031 Mvar
Q3′ = 0.484 ⋅ P3 = 1.453 Mvar
da cui:
Q3, rif = Q3′ − Q3 = 1.453 − 2.000 = −0.547 Mvar
Il nuovo profilo di tensione sarà dato da:
Tratta n° 1
P = 9.000 MW
Q = 4.359 Mvar
ΔV = 6 ⋅
0.1 ⋅ 9 + 0.3 ⋅ 4.359
= 0.637kV ;
20.8
V1, rif = V0 − ΔV = 20.800 − 0.637 = 20.163kV
Tratta n° 2
P = 5.000 MW
Q = 2.422 Mvar
ΔV = 3 ⋅
0.1 ⋅ 5 + 0.3 ⋅ 2.422
= 0.182kV ;
20.163
V2, rif = V1, rif − ΔV = 20.163 − 0.182 = 19.981kV
Tratta n° 3
P = 3.000 MW
Q = 1.453 Mvar
ΔV = 2 ⋅
0.1 ⋅ 3 + 0.3 ⋅ 1.453
= 0.074kV ;
19.981
V3, rif = V2, rif − ΔV = 19.981 − 0.073 = 19.907 kV
Si noti il miglioramento del profilo di tensione.
Le correnti nelle varie tratte sono date da:
I1 =
9 + j 4.359
3 ⋅ 20.163
= 0.286 kA ;
I2 =
Versione 1.00 - novembre 2010
5 + j 2.422
3 ⋅ 19.981
= 0.161 kA ;
I3 =
3 + j1.453
3 ⋅ 19.907
= 0.097 kA
A.A. 2010-2011
p. 50 di 80
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 51 di 80
e quindi le perdite complessive sono pari a:
(
= 3 ⋅ (6 ⋅ 0.3 ⋅ I
)
) = 0.529 Mvar
Ploss = 3 ⋅ 6 ⋅ 0.1 ⋅ I12 + 3 ⋅ 0.1 ⋅ I 22 + 2 ⋅ 0.1 ⋅ I 32 = 0.176 MW
Qloss
2
1
+ 3 ⋅ 0.3 ⋅ I 22
+
2 ⋅ 0.3 ⋅ I 32
Le perdite di potenza attiva sono diminuite di 32 kW. Ipotizzando un funzionamento continuativo di circa
8000 h/anno (solo fermate per manutenzione), questo corrisponde ad un risparmio di circa 256 mila
kWh/anno.
Per il dimensionamento dei condensatori:
B1,rif =
B2,rif =
B3, rif =
− Q1, rif
V12,rif
− Q2,rif
V22,rif
− Q3, rif
V32,rif
B1,rif
1.063
= 2614 μS ⇒ C1 =
= 8320 nF
2
ω
20.163
B2,rif
0.031
=
= 78 μS
⇒ C2 =
= 247 nF
2
ω
19.981
B3,rif
0.547
=
= 1380 μS ⇒ C3 =
= 4394 nF
2
ω
19.907
=
Si lascia al lettore il calcolo con rifasamento a cos ϕ N = 1 .
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 52 di 80
12 - Calcolo delle correnti di cortocircuito
12.1 - Elementi di teoria: generalità sul calcolo di cortocircuito e guasti trifase
12.1.1 - Generalità
Lo studio delle correnti di cortocircuito è uno dei problemi classici per l'impiantista elettrico; la conoscenza
dei valori di tali correnti è fondamentale per un corretto dimensionamento delle linee e dei trasformatori, ma
soprattutto dei dispositivi di protezione e di intervento: relè e interruttori. L'utilizzo di relè di minima tensione
negli impianti industriali BT e MT e di relè distanziometrici nelle impianti di trasmissione in AT rende
necessaria non solo la conoscenza delle correnti nei vari rami, ma anche delle tensioni nei nodi dell'impianto
durante e dopo il guasto.
Se non ci si prefigge un'analisi raffinata, che tenga in conto i transitori elettromagnetici ed elettromeccanici,
lo studio delle correnti di cortocircuito è relativamente semplice dal punto di vista concettuale, basandosi su
pochi concetti, che vanno però compresi a fondo e utilizzati correttamente. Può invece essere più complesso
dal punto di vista computazionale, specie quando la rete presenta dimensioni notevoli, soprattutto se si tratta
di reti magliate e di guasti dissimmetrici (vedasi seguito).
Il principio fondamentale su cui ci si basa per il calcolo è il principio di sovrapposizione degli effetti. Come
ben noto, tale principio è applicabile solo a reti lineari e in cui i generatori siano ideali. Occorre pertanto che
la rete oggetto dello studio goda di queste proprietà. Come frequentemente accade per molte applicazioni
ingegneristiche, anche in questa si commette una approssimazione, ma i risultati ottenibili sono molto vicini
al vero. Ulteriori approfondimenti permetteranno di tenere in qualche considerazione effetti di non-linearità o
di applicare il principio entro limiti che permettano di considerare la rete come effettivamente lineare.
E' ben noto che iniettando da sorgente esterna corrente in un nodo di una rete è possibile modificare la
tensione di tale nodo (e degli altri nodi della rete). Infatti, detta [Y ] la matrice delle ammettenza nodali, vale:
[Δ I ] = [Y ] ⋅ [ΔU ]
[12.1]
da cui reciprocamente:
ΔU = Z ⋅ Δ I
dove:
[12.2]
[Z ] = [Y ]−1
[12.3]
è la matrice delle impedenze nodali. Così, ipotizzando l'iniezione di corrente nel solo nodo k − esimo, vale:
ΔU 1 = Z 1k ⋅ Δ I k
ΔU 2 = Z 2 k ⋅ Δ I k
[12.4]
K
ΔU n = Z nk ⋅ Δ I k
ed in particolare:
ΔU k = Z kk ⋅ Δ I k
[12.5]
Quindi il fenomeno (reale!) del cortocircuito in un dato nodo può essere modellizzato come una iniezione di
corrente nel nodo di guasto, corrente tale da annullare la tensione del regime preesistente. Tale iniezione
altri non è se non la corrente di guasto cambiata di segno: convenzione abituale è che la corrente di guasto
sia considerata positiva se uscente, mentre le iniezioni delle [12.1], [12.2], [12.4], [12.5] sono positive se
entranti, per cui la [12.5] diventa:
ΔU k = − Z kk ⋅ I cc , k
[12.6]
dove I cc , k è la corrente di cortocircuito nel nodo. Sia:
(0 )
Uk
la tensione del regime preesistente. Allora deve valere:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
(0 )
U k + ΔU k = 0
p. 53 di 80
[12.7]
se il guasto è franco; quindi:
(0 )
U k − Z kk ⋅ I cc , k = 0 ⇒ I cc , k
(0 )
U
= k
Z kk
[12.8]
Quest'ultima formula mostra con chiarezza come il procedimento fin qui seguito altro non sia se non
l'applicazione del teorema di Thevenin. Il valore Z kk , k − esimo elemento diagonale della matrice delle
impedenze nodali, altri non è se non l'impedenza equivalente di Thevenin dell'intera rete vista da quel nodo,
(0 )
e il valore U k , tensione del regime preesistente, altri non è se non la tensione equivalente di Thevenin
(tensione a vuoto in quel nodo, dove per "vuoto" si intende che il nodo non è ancora stato posto a terra
mediante cortocircuito).
Se però il guasto non è franco, cioè se esiste una impedenza di guasto Z g (resistenza d'arco, impedenza
del mezzo incontrato dalla corrente per chiudere il circuito, etc.), allora la [12.7] diventa:
(0 )
U k + ΔU k = Z g ⋅ I cc , k
[12.9]
e quindi la [12.8]:
(0 )
(0 )
U k − Z kk ⋅ I cc, k = Z g ⋅ I cc, k ⇒I cc, k =
Uk
Z kk + Z g
[12.10]
Quest'ultima formula, ancora perfettamente coerente con la rappresentazione di Thevenin, è più generale; la
[12.8] è in essa contenuta, semplicemente ponendo pari a 0 il valore dell'impedenza di guasto.
La [12.10] può essere usata indifferentemente utilizzando valori assoluti oppure valori in p.u.. Essa tuttavia è
valida solo per guasti trifase simmetrici (guasto contemporaneo nelle tre fasi, con medesima impedenza
di guasto in ciascuna delle tre fasi).
Questo approccio evidenzia alcuni punti fondamentali:
a)
l'intera rete viene ridotta nel punto di guasto ad un circuito equivalente di Thevenin;
b)
tale circuito viene chiuso sull'impedenza di guasto (eventualmente nulla) calcolando così la corrente di
guasto (effetto di guasto che si sovrappone al regime preesistente);
c)
mediante tale corrente, utilizzando la [12.1] (ricordare che la corrente di guasto ha segno opposto
rispetto alla corrente utilizzata nella formula) è possibile calcolare in qualunque altro nodo della rete la
tensione dovuta all'effetto di guasto (o, se si preferisce esprimersi in altro modo, la variazione di
tensione rispetto al regime dovuta al guasto); informazioni utile, tra l'altro, per una corretta scelta o per
la corretta taratura dei relè di minima tensione;
d)
grazie a queste variazioni di tensione è possibile calcolare in ogni ramo della rete la corrente dovuta
all'effetto di guasto (o, se si preferisce, la variazione di corrente rispetto al regime dovuta al guasto):
questa informa di quanto il guasto possa essere pericoloso (correnti elevate, molto superiori alla portata
nominale e persistenti per lungo tempo, portano alla distruzione dell'isolamento per l'elevato calore
sviluppato dall'effetto Joule, alla rottura meccanica di quadri e sbarre per i notevoli sforzi elettrodinamici,
o addirittura alla fusione di parti metalliche conduttrici) e permette quindi di effettuare il corretto
dimensionamento di linee, quadri, sbarre, interruttori e una corretta scelta e taratura dei relè di massima
corrente.
Se l'impedenza equivalente di Thevenin nel nodo può essere calcolata mediante un processo di riduzione
(serie-parallelo, stella-triangolo o triangolo-stella, etc.), quindi senza ricorrere alla matrice della impedenze
nodali, i coefficienti:
Z hk (h = 1,2,K , n )
da utilizzarsi nella [12.1] possono essere ottenuti in generale solo calcolando la colonna k − esima di tale
matrice. La matrice delle ammettenze nodali viene costruita per ispezione; la matrice della impedenze nodali
può invece essere ottenuta solo invertendo la matrice delle ammettenze. Essendo necessaria però una sola
colonna di tale matrice, anziché eseguire un processo di inversione totale basta risolvere il sistema:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
⎡ Z 1k ⎤ ⎡ 0 ⎤
⎢Z ⎥ ⎢ 0 ⎥
⎢ 2k ⎥ ⎢ ⎥
⎢ K ⎥ ⎢K⎥
[Y ]⋅ ⎢ ⎥ = ⎢ ⎥
⎢ Z kk ⎥ ⎢ 1 ⎥
⎢ K ⎥ ⎢K⎥
⎥ ⎢ ⎥
⎢
⎢⎣ Z nk ⎥⎦ ⎢⎣ 0 ⎥⎦
p. 54 di 80
[12.11]
dove cioè la matrice dei coefficienti sia la matrice delle ammettenze nodali, il vettore colonna delle incognite
sia la colonna voluta della matrice delle impedenze nodali, e la colonna dei termini noti sia un vettore
composto interamente da valori nulli, con la sola eccezione dell'elemento k − esimo, che dovrà essere pari a
1. Infatti, essendo la matrice della impedenze l'inversa della matrice delle ammettenze, il prodotto delle due
matrici dovrà fornire la matrice identità; pertanto il prodotto della matrice delle ammettenze nodali per la
colonna k − esima della matrice delle impedenze nodali fornirà la colonna k − esima della matrice identità; la
[12.11] esprime tale relazione.
12.1.2 - Transitori elettromagnetici
Le formule fin qui riportate, ed in particolare la [12.10] che è la formula più generale, sono espressioni
fasoriali. Di fatto queste esprimono un effetto che si sovrappone a quello preesistente, ma tale effetto è a
sua volta un effetto in regime P.A.S., quindi un nuovo regime. Una corretta impostazione del problema
avrebbe richiesto la scrittura di un sistema di equazioni differenziali per tenere conto dei transitori
elettromagnetici dovuti alla presenza in rete di induttanze e capacità. I risultati ottenuti dalla [12.10] e dalle
altre formule forniscono quindi le sole componenti P.A.S. delle correnti di guasto (e delle variazioni di
tensione), dette componenti simmetriche della correnti (o tensioni) di guasto.
Esistono poi le correnti transitorie che sono di tipo esponenziale smorzato (come nei circuiti R-L o R-C) o di
tipo oscillatorio smorzato (come nei circuiti R-L-C con determinante dell'equazione caratteristica negativo).
Le correnti esponenziali smorzate vengono chiamate correnti o componenti unidirezionali, poiché non
cambiano mai segno nel tendere a zero (mentre le correnti simmetriche sono alternate e quindi vanno ora in
un verso ora nell'altro). Queste correnti hanno valori iniziali tali da far sì che, sommate alla componente
simmetriche, le correnti nelle induttanze e le tensioni nei condensatori non cambino "a scalino" ma
−
+
rimangano uguali negli istanti 0 e 0 del guasto. Tipicamente, durante una guasto, in un ramo si ha:
(
)
i (t ) = 2 ⋅ I (0 ) ⋅ cos ωt + α (0 ) + 2 ⋅ I cc ⋅ cos(ωt + α cc ) + IUniDir ⋅ e − (t − t 0 ) τ
[12.13]
dove sono ben evidenti dai pedici o dagli apici la corrente del regime preesistente (apice " (0 ) "), quella
simmetrica dovuta al guasto (pedice " cc ") e quella unidirezionale (pedice " UniDir "), e dove t = t 0 è l'istante di
guasto. In tale istante, da 0 − e 0 + , dovrà valere che la corrente del regime preesistente e la corrente data
dalla [12.13] siano uguali:
(
)
(
)
2 ⋅ I (0 ) ⋅ cos ωt0 + α (0 ) = 2 ⋅ I (0 ) ⋅ cos ωt0 + α (0 ) + 2 ⋅ I cc ⋅ cos(ωt0 + α cc ) + IUniDir
[12.14]
cioè:
2 ⋅ I cc ⋅ cos(ωt0 + α cc ) + IUniDir = 0
[12.15]
IUniDir = − 2 ⋅ I cc ⋅ cos(ωt0 + α cc )
che significa che il valore massimo della corrente unidirezionale è pari al valore istantaneo (cambiato di
segno) che la componente simmetrica ha al momento del guasto. Va notato che tale valore massimo della
componente unidirezionale non sarà uguale nelle 3 fasi perché in ciascuna di esse i valori istantanei della
componente simmetrica saranno diversi (all'argomento del coseno della [12.15] andrà aggiunto un valore
m 2π 3 ).
La conoscenza delle correnti unidirezionali è pure molto importante. Le costanti di tempo sono solitamente
molto piccole (ms o decine di ms, nei casi peggiori centinaia di ms), per cui il fenomeno transitorio si
esaurisce molto in fretta e solitamente non fornisce contributi molto grandi al riscaldamento per effetto Joule,
né è ancora rilevante quando gli interruttori intervengono per aprire il circuito (dopo alcuni periodi); ma sono
le componenti unidirezionali che determinano il massimo (o minimo) assoluto del valore istantaneo di
corrente, detto corrente di picco: tale valore va tenuto sotto osservazione perché valori troppo elevati
possono portare alla rottura del quadro o di altri componenti per sforzi elettrodinamici. E' esperienza comune
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 55 di 80
che per una rottura meccanica non importa tanto quanto a lungo permanga la forza, ma se tale forza supera
o meno una data soglia: al superamento, la rottura è pressoché immediata (esempio comune: la rottura di
noci o mandorle con lo schiaccianoci: se non si ha forza sufficiente si può agire anche per parecchi secondi
senza ottenere nulla, se si supera una certo valore di forza il guscio cede di schianto).
Il numero di costanti di tempo presenti in una rete elettrica lineare è pari al numero complessivo di induttanze
e condensatori in essa presenti, perché tale è l'ordine del sistema di equazioni differenziali che descrive il
transitorio elettromagnetico della rete (più induttanze in serie o più condensatori in parallelo devono essere
considerati come un solo componente); tale numero può quindi essere molto elevato, e a ciascuna costante
di tempo corrisponde una componente unidirezionale in ogni componente della rete. La corrente di guasto o
le correnti nei vari rami dovute al guasto sono quindi la sovrapposizione di una componente simmetrica e di
molte componenti unidirezionali. La [12.13] più in generale diventa:
(
)
M
i (t ) = 2 ⋅ I (0 ) ⋅ cos ωt + α (0 ) + 2 ⋅ I cc ⋅ cos(ωt + α cc ) + ∑ IUniDir , m ⋅ e − (t − t 0 ) τ m
[12.16]
m =1
La valutazione di tali componenti per reti anche solo con pochi nodi è quindi una operazione complessa sia
per quanto riguardo il calcolo delle costanti di tempo sia per quanto riguarda il valore iniziale di ogni
componente. Inoltre va tenuto presente quanto segue. Già per la formula [12.13] non è semplice stabilire
quale sia, in un periodo, l'istante peggiore in cui possa avvenire il guasto, cioè quello che comporta il
massimo valore assoluto della corrente di picco; si tratta infatti di trovare il massimo di una espressione
trascendente al variare di un parametro ( t 0 ). Or dunque, se il calcolo è già complesso con una sola costante
di tempo, a maggior ragione lo sarà con più costanti, come previsto dalla formula [12.16].
L'esperienza di studio delle reti elettriche inoltre porta ad affermare che è possibile, senza introdurre gravi
errori, approssimare con una sola componente unidirezionale la presenza di molteplici componenti.
Attenzione!
Poiché la soluzione del sistema [12.11] ha fornito il valore:
Z kk = Rkk + jX kk = Rkk + jωLkk
si può essere portati a credere che l'induttanza
τ=
Lkk esista realmente e quindi che sia:
Lkk
Rkk
non va invece dimenticato che l'impedenza in questione è una impedenza equivalente ed è valida solo ai fini
del calcolo fasoriale e solo se il sistema funziona in regime P.A.S. (Periodico Alternato Sinusoidale) a quella
frequenza per la quale l'equivalente è stato calcolato; non ha invece alcun valore per i calcoli a frequenze
diverse o, peggio ancora, in regimi diversi dal regime P.A.S..
La costante di tempo va quindi calcolata con metodi diversi, di cui si parlerà eventualmente in seguito.
12.1.3 - Comportamento subtransitorio, transitorio, permanente
Solitamente gli alternatori vengono rappresentati come generatori ideali, eroganti una f.e.m. spesso indicata
con E , con in serie una reattanza detta reattanza sincrona ed eventualmente con la resistenza d'armatura.
Per questo vale:
(
)
E& = U& + R& a + jX& s ⋅ I&
[12.17]
dove U& è la tensione ai morsetti e I& la corrente erogata.
Nella costruzione dell'equivalente di Thevenin di un generatore reale funzionante a carico il generatore
ideale viene spento e quindi la reattanza sincrona viene posta a terra (nella rappresentazione unifilare di un
sistema trifase) ed entra nel calcolo della matrice delle ammettenze nodali come elemento shunt; il
generatore equivalente di Thevenin eroga una tensione pari a quella misurata ai morsetti nel regime
precedente al guasto. E' quindi immediato pensare che in caso di guasto il generatore fornisce un corrente
(simmetrica) di guasto pari a:
U&
I&cc, gen = &
Ra + jX& s
[12.18]
La corrente complessiva è data dal circuito originale:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
I&tot , gen =
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
E&
R& a + jX& s
p. 56 di 80
[12.19]
e può essere vista come:
E&
E& − U&
U&
+ &
I&tot , gen = &
= &
&
&
Ra + jX s Ra + jX s Ra + jX& s
[12.20]
dove il termine:
E& − U&
&
Ra + jX& s
è la corrente di regime, come da equazione [12.17], mentre il termine:
U&
R& a + jX& s
è il solo effetto di guasto, come da equazione [12.18].
Tuttavia non va dimenticato che in caso di perturbazione il comportamento di un generatore è parecchio più
complicato. Dal modello dell'alternatore si ricorderà che la corrente dell'effetto di guasto vede inizialmente
una reattanza molto inferiore a quella sincrona, a causa dell'effetto dei transitori sui circuiti di eccitazione e
dei circuiti smorzatori di asse diretto e in quadratura. Tale reattanza prende il nome di reattanza
subtransitoria, si indica con X& ′′ ed è 4÷8 volte inferiore alla reattanza sincrona.
Gradualmente questa reattanza evolve verso valori maggiori, e si parla allora di reattanza transitoria X& ′ ,
circa 1.5÷2.0 volte più grande della transitoria. Infine la reattanza raggiunge gradualmente il valore della
reattanza sincrona.
Valori tipici:
X& ′′ = 0.12 ÷ 0.25 pu
X& ′ = 0.20 ÷ 0.40 pu
X& = 0.80 ÷ 2.50 pu
Tipicamente allora in una rete elettrica con generatori il cortocircuito attraversa varie fasi o condizioni:
-
la fase iniziale o subtransitoria, caratterizzata da risposta dei generatori con reattanze subtransitorie;
sono questi i valori di reattanza da porre nel calcolo dei circuiti equivalenti di Thevenin e nella matrice
delle ammettenze per il calcolo del solo effetto di guasto, per cui:
I&′′cc, gen =
U&
R& a + jX& ′′
[12.21]
solitamente in questa fase i dispositivi di protezione non hanno ancora fatto in tempo ad aprire gli
interruttori; tuttavia questi, come pure cavi, quadri, etc., nonché il generatore stesso, devono essere
dimensionati per resistere agli effetti termici della corrente subtransitoria e alle sollecitazioni
elettromeccaniche dovute alla corrente di picco; va tenuto presente che per i generatori il valore della
resistenza di armatura è solitamente molto piccolo (dell’ordine di 0.005 p.u.) e questo può dar luogo a
costanti di tempo della componente unidirezionale elevate; per esempio con R& a = 0.005 pu e
X& ′′ = 0.2 pu ⇒ L′′ = 0.00064 ( f = 50 Hz ) , si ha τ = 127 ms ; questo significa che il rapporto tra corrente
di picco e (valore efficace della) corrente simmetrica (subtransitoria) sarà molto prossimo al valore
massimo teorico di 2 2 ;
-
la fase successiva, detta transitoria, dopo un tempo dell'ordine dei 100 ms, caratterizzata da risposta
dei generatori con reattanze transitorie; sono questi i valori di reattanza da porre nel calcolo dei circuiti
equivalenti di Thevenin e nella matrice delle ammettenze per il calcolo del solo effetto di guasto;
U&
I&′cc, gen = &
Ra + jX& ′
Versione 1.00 - novembre 2010
[12.22]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 57 di 80
solitamente è in questa fase che si ha l’intervento di apertura degli interruttori comandati dai relè che
hanno percepito il guasto, quindi è sulla base della corrente transitoria che gli interruttori vanno
dimensionati per quanto riguarda il loro potere di apertura;
-
la fase permanente, dopo alcune centinaia di ms, caratterizzata da risposta dei generatori con reattanze
sincrone; riguardo a quest'ultima va però precisato che a questo punto dell'evoluzione del fenomeno
l'intervento dei regolatori di tensione avrà già fatto in tempo a modificare sensibilmente il valore della
tensione E per cui l'utilizzo di una formula come la [12.18] per il calcolo della corrente permanente non
è particolarmente attendibile.
La componente sinusoidale avrà quindi una ampiezza che si smorzerà nel tempo, evolvendo da un massimo
nella condizione subtransitoria a valori via via decrescenti.
Non va poi dimenticato che la presenza della componente unidirezionale (diversa nelle tre fasi) andrà
sempre tenuta in conto, sovrapponendo tale componente a quella simmetrica, e cha tale componente sarà
particolarmente gravosa per l’elevato valore della costante di tempo di smorzamento.
12.1.4 - Transitori elettromeccanici
I transitori di tipo elettromagnetico non sono però gli unici transitori presenti nella rete in caso di guasto. Le
macchine rotanti subiscono sensibili perturbazioni per quanto riguarda il bilancio coppia elettrica - coppia
resistente o coppia motrice; ne consegue una modificazione della velocità, che solitamente consiste in una
rallentamento per i motori (il crollo di tensione comporta la mancanza di alimentazione e quindi la coppia
resistente prevale su quella motrice) e in una accelerazione per i generatori (il crollo di tensione riduce la
possibilità per la macchina di cedere potenza elettrica alla rete, mentre il motore primo continua a fornire
coppia motrice). Questi fenomeni prendono in generale il nome di transitori elettromeccanici; sono
fenomeni molto più lenti di quelli elettromagnetici, separati da questi da 2÷4 ordini di grandezza (= fattore
100÷10000) per quanto riguarda le costanti di tempo.
Per i motori il rischio maggiore è quello dello stallo: il rallentamento può portare a riduzioni della velocità tali
che, all'eliminazione del guasto e al ripristino della tensione, la richiesta di potenza attiva e reattiva che il
motore fa alla rete sia eccessiva, tanto da non poter essere soddisfatta; il motore non è più in grado di
riaccelerare e continua a rallentare fino a fermarsi, oppure rimane a quella velocità o si riprende molto
lentamente, rimanendo per lungo tempo nella zona di funzionamento della caratteristica elettromeccanica
detta “zona di funzionamento instabile”; tutto questo mentre è ancora alimentato, assorbendo quindi elevati
valori di corrente (valori paragonabili a quelli delle correnti di spunto), con elevata produzione di calore per
effetto Joule e tutte le conseguenze, anche distruttive, del caso. Per la verità l'assorbimento di corrente di un
motore non ancora fermo non può essere superiore alla richiesta che si ha in condizioni di spunto, e quindi
la rete dovrebbe essere in grado di fornirlo senza problemi; ma nel caso del ripristino della tensione dopo
l'eliminazione di un guasto va considerato sia che tutti i motori coinvolti tentano, allo stesso tempo, di
riprendersi, sovraccaricando la rete, sia che la rete può essere complessivamente in condizioni di stabilità
ancora precarie perché anche i generatori sono ancora coinvolti nei rispettivi transitori elettromeccanici.
Inoltre per il normale avviamento di alcuni motori di grandi dimensioni sono talvolta previsti opportuni
accorgimenti (come per esempio la riduzione del carico meccanico durante lo spunto, per poi aumentarlo
gradualmente una volta raggiunta la zona di funzionamento stabile) che non possono essere applicati
all'eliminazione del guasto perché richiedono interventi manuali e comunque tempi molto più lunghi di quelli
disponibili.
Durante il guasto i motori si comportano come generatori: sono di fatto sorgenti di f.e.m., che però viene
presto ad esaurirsi. Il loro contributo è rilevante solo per quanto riguarda le correnti subtransitoria e di picco;
solitamente nella fase transitoria tale contributo è esaurito.
Per i generatori il rischio maggiore è quello della perdita di passo. Se un generatore accelera
eccessivamente rispetto ad altri o rispetto ad una rete prevalente (la rete detta "di potenza infinita"), il suo
angolo di carico potrebbe compiere un mezzo giro e la f.e.m. potrebbe trovarsi quindi in opposizione rispetto
a quella delle altre macchine; questo comporterebbe forti transiti di potenza attiva e reattiva tra quel
generatore e i rimanenti. Il fenomeno può presentarsi anche dopo l'eliminazione del guasto, perché la
pesante perturbazione dovuta al cortocircuito innesca un transitorio elettromeccanico che richiede un certo
tempo per spegnersi naturalmente. Il superamento del mezzo giro fino al compimento del giro intero, o di più
giri, detto appunto "perdita di passo", produce pesanti sollecitazioni sulla macchina medesima e comporta
rilevanti oscillazione nel valore efficace della tensione (il fenomeno è simile a quello dei "battimenti" in campo
acustico) e provoca l'intervento delle protezioni che staccano dalle rete i gruppi coinvolti, evitando danni ai
componenti ma, spesso, portando alla fermata dell'impianto.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 58 di 80
Sempre per i generatori non va poi dimenticato l'effetto dei regolatori di tensione e di velocità.
I primi (spesso chiamati con la sigla AVR - Automatic Voltage Regulator - tenderanno, da un lato, ad
aumentare l'eccitazione per ripristinare la tensione, e dall’altro a ridurla per limitare le correnti durante il
guasto (se sono forniti di logiche di controllo che considerano anche la corrente e/o la potenza reattiva
erogata); dei due effetti sarà possibile sapere quale sarà quello prevalente solo con opportune simulazioni
con programmi di calcolo specialistici, o quantomeno con considerazioni più complesse di quelle possibili in
questa sede. L'aumento dell'eccitazione modifica il modello di rete costruito con l'equivalente di Thevenin,
perché cambiano le sorgenti di f.e.m.; tale modello è quindi valido solo nei primi istanti del transitorio, per un
lasso di tempo di poche centinaia di ms (situazione subtransitoria e, in parte, transitoria).
I secondi (spesso chiamati Governor nella letteratura anglosassone) agiranno sui motori primi per
stabilizzare la velocità; saranno solitamente più lenti degli AVR perché dovranno agire meccanicamente su
valvole di alimentazione (dell’acqua per le turbine idrauliche, del vapore per le turbine a vapore, del
combustibile per i turbogas).
Tutte queste considerazioni devono servire come riflessione critica perché si abbiano ben presenti i limiti
insiti nel calcolo delle correnti di cortocircuito con il metodo di sovrapposizione degli effetti. Tuttavia
l'esperienza insegna che tale metodo, se eseguito cercando sempre le condizioni peggiori (esempio:
condizioni peggiori per la componente unidirezionale e quindi massima corrente di picco), fornisce risultati
attendibili o almeno a vantaggio di sicurezza.
12.1.5 - Metodi “a rete scarica” e “a rete carica”
Nei precedenti paragrafi si è affermato che il calcolo delle correnti durante il guasto viene ottenuto dalla
sovrapposizione di due effetti:
-
il regime preesistente al guasto
-
il regime di guasto
La somma delle correnti dei due effetti fornisce la corrente complessiva durante il guasto.
Questo metodo comporta la necessità di calcolare il regime preesistente sia per determinare le correnti in
tale regime, da sommare poi a quelle del regime di guasto, sia per determinare la tensione preesistente in
ogni nodo per il quale si voglia calcolare il guasto, da usarsi come tensione dell'equivalente di Thevenin nella
formula [12.8]. Ma è ben noto che il calcolo di regime è, spesso, un calcolo laborioso, che per reti radiali può
essere risolto in via approssimata oppure in maniera esatta con metodi iterativi, o che più in generale (reti di
tipo qualunque) richiede la soluzione di un problema di load-flow. Così, il calcolo delle correnti di
cortocircuito, che di per sé sarebbe lineare, come da formule [12.8] e [12.11], richiede preventivamente un
calcolo non lineare!
Inoltre, questo modo di procedere arriva a risultati diversi a seconda delle condizioni del regime preesistente.
La finalità del calcolo di cortocircuito è invece quella, solitamente, di trovare le condizioni in assoluto peggiori
per la rete. Occorrerebbe allora considerare infinite situazione del regime preesistente per poi scegliere
quella che porta alle maggiori correnti complessive durante il cortocircuito, eseguendo così il calcolo infinite
volte.
L'esperienza però mostra che normalmente le correnti di guasto sono molto più grandi di quelle di regime. Si
opta quindi frequentemente per una strada diversa:
-
il regime preesistente è considerato "a vuoto": nessuna transito di potenza in tutta la rete, tensione
uguale in modulo e fase in tutti i nodi;
-
con tale regime si calcola il regime di guasto; le correnti complessive durante il guasto coincidono con
quelle del solo regime di guasto, essendo nulle nel regime preesistente;
-
per eseguire un calcolo a vantaggio di sicurezza, che tenga conto cioè di tutte le possibili condizioni di
funzionamento e fornisca quella peggiore, il valore di tensione in tutti della rete del regime preesistente
a vuoto viene considerato non pari a 1 p.u., ma superiore: 1.05 o 1.10 p.u., a seconda dei casi e del
margine di sicurezza che si vuole tenere in conto.
Questo metodo è detto metodo a rete scarica, mentre quello che considera un regime reale preesistente è
detto per questo metodo a rete carica; il metodo a rete scarica comporta una maggiore semplicità di calcolo
e al tempo stesso una maggiore generalità.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 59 di 80
12.1.6 - Correnti massime e minime di cortocircuito
Infine, va tenuto presente che non sempre la motivazione del calcolo delle correnti di cortocircuito è quella di
trovare le massime correnti per un corretto dimensionamento dei componenti, dei quadri e degli interruttori.
Un problema più sottile è quello della percezione del guasto da parte dei relè: ci possono essere condizioni
di funzionamento della rete in cui, in caso di cortocircuito, le correnti di guasto sono modeste; occorre che
anche in tali casi i relè abbiano la percezione che c'è un guasto in atto e quindi intervengano.
Un esempio è il seguente. Si consideri una rete industriale composta dalla connessione con la rete
prevalente, da alcuni generatori interni, (l'impianto è di autoproduzione), e da parecchi carichi rotanti, oltre
ovviamente ai quadri, ai trasformatori e ai cavi per connettere tra loro sorgenti e utenze. La condizione in cui
la connessione con la rete prevalente è chiusa, tutti i generatori sono in servizio e così pure tutti i motori è
quella che, ovviamente, in caso di guasto presenterà i maggiori valori di correnti di cortocircuito, perché
saranno numerosi i contribuenti al guasto. Si dice allora che questo è un calcolo di cortocircuito a correnti
massime.
Si supponga che (per esempio per motivi di manutenzione) l'impianto venga fermato, lasciando in servizio
solo pochi carichi statici (illuminazione, etc.) e spegnendo anche tutti i generatori (potenza solo dalla rete
prevalente) oppure lasciando in servizio un solo generatore ma aprendo la connessione con la rete
prevalente. In tale configurazione, in caso di guasto, le correnti di cortocircuito saranno molto inferiori rispetto
al caso precedente, perché si avrà una sola fonte di contribuzione di corrente (la rete prevalente, collegata
all'impianto mediante il trasformatore di interconnessione, oppure il solo generatore rimasto in servizio). Se i
relè fossero tarati solo in base al calcolo a correnti massime, probabilmente in caso di guasto non
interverrebbero, perché la corrente percepita sarebbe inferiore alla soglia prescelta. Occorre allora eseguire
anche questo calcolo, detto a correnti minime, per poter predisporre una corretta taratura. Per maggiore
precauzione, anziché usare una tensione di 1.05 o 1.10 nel regime preesistente a vuoto, si preferisce
utilizzare una tensione di 1.00 o 0.95 p.u., in modo da ottenere le correnti minime assolute. Il problema è
comunque delicato, perché a volte le correnti minime, in alcuni rami, sono inferiori alle correnti di regime in
condizione di carico normale (il protezionista si augura di non imbattersi mai in questi casi limite).
12.2 - Elementi di teoria: guasti dissimmetrici
12.2.1 - Generalità
I guasti trifase non sono gli unici tipi di guasto possibili, anzi. Frequentemente è una sola fase ad essere
colpita dal cortocircuito, e in tal caso si parla di guasto monofase, altre volte il cortocircuito avviene tra due
fasi distinte, e in tal caso si parla di guasto bifase. Spesso - per non dire sempre - il guasto trifase è
l'evoluzione di un guasto monofase o bifase, dove per cause varie (estensione dell'arco, distruzione
dell'isolante, etc.) vengono coinvolte anche le fasi rimaste sane. Il guasto monofase non può che essere tra
una fase e la terra; il guasto bifase invece può essere tra due fasi senza interessare la terra, e in tal caso
prende il nome di guasto bifase isolato, oppure interessandola, e in tal caso prende il nome di guasto
bifase a terra. In tutti questi casi il guasto può essere franco oppure mediante impedenza.
12.2.2 - Multipolo equivalente
Il problema da affrontare in caso di guasto dissimmetrico è più
complesso di quello relativo al caso di guasto trifase, anche se vale
sempre l'utilizzo del principio di sovrapposizione degli effetti.
La rete viene sempre rappresentata mediante un equivalente di
Thevenin. Già per il guasto trifase sappiamo che il bipolo equivalente
di Thevenin è una rappresentazione unifilare di un sistema trifase;
occorre invece ora esplicitare le 3 fasi, per ciascuna delle quali si avrà
un generatore equivalente in serie con una impedenza equivalente,
come da fig. 12.1.
a
G
b
c
Quindi anziché un bipolo equivalente si avrà un multipolo equivalente.
Siano:
fig. 12.1
U a ,U b ,U c
le tensioni dei tre morsetti di uscita (tensioni di fase, rispetto a terra)
E a ,E b ,E c
le tensioni dei tre generatori equivalenti
I a , I b ,I c
le correnti uscenti dai tre morsetti
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 60 di 80
Naturalmente le tre tensioni dei generatori equivalenti sono tra loro uguali in modulo e sfasate di 120° l'una
dall'altra, cioè vale che:
E a = E ⋅ e jθ
Eb = Ea ⋅ e
Ec = Ea
−j
2π
3
2π
+j
⋅e 3
= E ⋅e
= E ⋅e
⎛ 2π ⎞
j⎜ θ−
⎟
3 ⎠
⎝
[12.23]
2π ⎞
⎛
j⎜ θ+
⎟
3 ⎠
⎝
Le tensioni ai morsetti sono pari alle tensioni dei generatori meno la c.d.t. dovuta al passaggio di corrente
sulle impedenze equivalenti. Va però tenuto presente che la c.d.t. su una fase, in generale, non dipende solo
dalla corrente su tale fase, ma anche dalle correnti sulle altre due fasi, a causa della presenza di effetti mutui
(mutue induttanze, mutue capacità). Si può allora scrivere:
U a = E a − (Z aa ⋅ I a + Z ab ⋅ I b + Z ac ⋅ I c )
U b = E b − (Z ba ⋅ I a + Z bb ⋅ I b + Z bc ⋅ I c )
U c = E c − (Z ca ⋅ I a + Z cb ⋅ I b + Z cc ⋅ I c )
[12.24]
o anche, in forma matriciale:
⎡U a ⎤ ⎡ E a ⎤ ⎡ Z aa
⎢ ⎥ ⎢ ⎥ ⎢
⎢U b ⎥ = ⎢ E b ⎥ − ⎢ Z ba
⎢⎣U c ⎥⎦ ⎢⎣ E c ⎥⎦ ⎢⎣ Z ca
Z ab
Z bb
Z cb
Z ac ⎤ ⎡ I a ⎤
⎥ ⎢ ⎥
Z bc ⎥ ⋅ ⎢ I b ⎥
Z cc ⎥⎦ ⎢⎣ I c ⎥⎦
[12.25]
quindi:
-
al posto del generatore equivalente di Thevenin, si ha una terna di generatori
-
al posto dell'impedenza equivalente di Thevenin, si ha una matrice (3 x 3) di impedenze
Un discorso a parte meriterà in seguito l'impedenza che dal punto "G" (centro stella dei generatori) va verso
terra.
Se il sistema equivalentato è, in ogni sua parte, geometricamente simmetrico sulle tre fasi, allora vale che:
Z aa = Z bb = Z cc
[12.26]
Z ab = Z ba = Z ac = Z ca = Z bc = Z cb
cioè tutti gli elementi fuori diagonale, vale a dire le mutue impedenze, sono uguali fra loro; tutti gli elementi
diagonali sono uguali fra loro. Se per esempio, anziché un equivalente, si avesse un trasformatore reale, si
avrebbe che:
Z aa = Z bb = Z cc = Z s = Z d + Z p
Z ab = Z ba = Z ac = Z ca = Z bc = Z cb = Z m = −
[12.27]
Zp
2
cioè: le impedenze diagonali (quelle che in ogni fase rendono conto della tensione dovuta alla corrente nella
fase medesima), che potremmo chiamare auto-impedenze (per distinguerle dalle mutue impedenze) e sono
contraddistinte dal pedice “s” che sta per “self-impedance”, possono essere viste come la somma di due
termini, uno che rende conto dei flussi magnetici di dispersione in quella fase ( Z d ) e uno che rende conto
della componente del flusso magnetico principale ( Z p ); componente che, generata dalla corrente di quella
fase, si concatenerà con la fase medesima ma anche con le altre; la mutua impedenza sarà pari alla metà di
tale impedenza cambiata di segno (il flusso generato da una fase di dividerà sulle altre due, percorrendole
nel verso opposto a quello con cui percorre la fase da cui proviene).
Quindi, per un sistema geometricamente simmetrico, si può scrivere anche:
⎡U a ⎤ ⎡ E a ⎤ ⎡ Z s
⎢U ⎥ = ⎢ E ⎥ − ⎢ Z
⎢ b⎥ ⎢ b⎥ ⎢ m
⎢⎣U c ⎥⎦ ⎢⎣ E c ⎥⎦ ⎢⎣ Z m
Zm
Zs
Zm
Z m ⎤ ⎡I a ⎤
Z m ⎥⎥ ⋅ ⎢⎢ I b ⎥⎥
Z s ⎥⎦ ⎢⎣ I c ⎥⎦
[12.28]
Si noti che quando il sistema lavora in condizioni non dissimmetriche, per cui:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
I a = I ⋅ e jδ
Ib = I a ⋅e
Ic = Ia
−j
2π
3
2π
+j
⋅e 3
= I ⋅e
= I ⋅e
1C - Introduzione agli Impianti Elettrici
⎛ 2π ⎞
j⎜ δ−
⎟
3 ⎠
⎝
p. 61 di 80
[12.29]
⎛ 2π ⎞
j⎜ δ+
⎟
3 ⎠
⎝
allora per esempio sulla fase "a":
U a = E a − (Z s ⋅ I a + Z m ⋅ I b + Z m ⋅ I c ) =
[12.30]
= E a − Z s ⋅ I a − Z m ⋅ (I b + I c )
e poiché le tre correnti sono uguali in modulo e sfasate di 120°, vale che la loro somma è nulla e quindi:
I a + I b + I c = 0⇒ I b + I c = − I a
[12.31]
da cui:
U a = E a − Z s ⋅ I a − Z m ⋅ (I b + I c ) = E a − Z s ⋅ I a − Z m ⋅ (− I a ) =
[12.32]
= E a − (Z s − Z m ) ⋅ I a
la dipendenza della tensione nella fase "a" dalla correnti nelle fasi "b" e "c" sembra essere scomparsa (ma
questa scomparsa è solo una conseguenza della simmetria delle correnti); analogamente vale per le altre
fasi. Si scrive allora:
U a = Ea − Z d ⋅ I a
U b = Eb − Z d ⋅ I b
U c = Ec − Z d ⋅ I c
[12.33]
dove Z d = Z s − Z m prende il nome di impedenza di esercizio; si è con questo tornati alla rappresentazione
unifilare di un sistema trifase, perché in generale è:
U = E − Zd ⋅I
[12.34]
Tornando al caso dissimmetrico, l'equivalente dato dalla [12.33] o, più in generale, dalla [12.28] contiene in
sé tutte le informazioni necessarie per affrontare il problema dei corti circuiti dissimmetrici. Per esempio, per
il guasto monofase basterà imporre 3 condizioni:
Ua = Zg ⋅Ia
Ib = 0
[12.35]
Ic = 0
dove Z g è l'eventuale impedenza di guasto in caso di guasto non franco (se il guasto è franco,
Z g = 0 ⇒ U a = 0 ). Quindi il sistema [12.33] si riduce alla sola equazione relativa alle tensioni nella fase "a",
dove, essendo nulle le correnti delle altre due fasi:
Ea − Z s ⋅ I a = Z g ⋅ I a
[12.36]
da cui:
Ia =
Ea
Zs +Zg
[12.37]
utilizzando tale corrente nelle altre due equazioni, è banale trovare la tensione ai morsetti nelle altre due fasi.
Un po' più complessa, ma comunque ancora ben risolvibile, la situazione per i guasti bifase a terra e bifase
isolato.
Con questo modello il problema dei guasti dissimmetrici è quindi di (quasi) facile soluzione. Tuttavia questo
modo di procede non viene praticamente mai utilizzato, ma si preferisce ad esso un modello, derivato da
questo, più elegante e più semplice dal punto di vista computazionale, anche se più complesso dal punto di
vista concettuale.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 62 di 80
12.2.3 - Le sequenze: elementi generali di teoria
Va tenuto presente che raramente sono disponibili, per i vari componenti di un sistema elettrico (linee,
trasformatori, generatori) i parametri di auto e mutua impedenza, in quanto solitamente viene fornito il valore
di impedenza equivalente di fase. Come scomporre tale impedenza nelle sua componenti auto e mutua
richiede delle informazioni aggiuntive. Quand'anche tali informazioni aggiuntive siano disponibili, allora
occorre tenere presente che il calcolo dell'impedenza equivalente di Thevenin con le tre fasi in evidenza è
molto più laborioso del calcolo con la rappresentazione unifilare, in quando ogni processo di riduzione serie
o parallelo non sarà fatto considerando due impedenze, bensì due matrici (3 x 3) di impedenze; per non
parlare delle conversioni stella-triangolo o triangolo-stella. Analogamente se si utilizza la matrice delle
ammettenze nodali, il processo di calcolo del vettore colonna della matrice delle impedenze dovrà essere
eseguito su matrici in cui ogni elemento è in realtà una sottomatrice (3 x 3). Possibile, ma non agevole.
Si ricorre allora ad una trasformazione che permette di superare questo problema. Per prima cosa occorre
definire con rigore cosa si intende per terna simmetrica. In generale, una terna di fasori o comunque di
vettori nel piano complesso si dice simmetrica se gode delle seguenti proprietà:
a)
i moduli delle tre grandezze sono uguali;
b)
ogni grandezza dista da quella della fase successiva di un medesimo angolo.
La seconda proprietà implica allora che la somma degli angoli di differenza di fase tra queste grandezze
deve dare l'angolo giro oppure un suo multiplo, cioè che:
n f ⋅ Δθ = k ⋅ 2π
dove
[12.38]
n f è il numero delle fasi ( n f = 3 per i sistemi trifase). Per i sistemi trifase sono quindi possibili solo tre
casi:
Δθ = k
2π
3
⇒ Δθ = 0;
Δθ =
2π
;
3
Δθ =
4π
3
[12.39]
Si consideri l'operatore:
α=e
j
2π
3
1
3
=− + j
2
2
[12.40]
e si noti che:
2
j
4π
3
3
j
6π
3
α =e
α =e
=e
−j
2π
3
=−
1
3
−j
2
2
[12.41]
=1
Questo operatore, se applicato ad una grandezza fasoriale tipo tensione o corrente, apporta ad essa uno
sfasamento in avanti di 120°. Per esempio una terna di tensioni come quella dei tre generatori equivalenti di
Thevenin della [12.23] potrebbe essere scritta come:
E a = E ⋅ e jθ
2
E b = E ⋅ e j (θ − 2 π 3 ) = α ⋅ E a
E c = E ⋅ e j (θ + 2 π 3 ) = α ⋅ E a
[12.42]
Allora in un sistema trifase le terne simmetriche possibili, per una generica grandezza
⎡ F o, a ⎤ ⎡ F o ⎤
⎢
⎥ ⎢ ⎥
⎢ F o , b ⎥ = ⎢ F o ⎥;
⎢ F o, c ⎥ ⎢⎣ F o ⎥⎦
⎣
⎦
⎡F d ,a ⎤ ⎡ F d ⎤
⎢
⎥ ⎢ 2
⎥
⎢ F d , b ⎥ = ⎢α ⋅ F d ⎥;
⎢ F d , c ⎥ ⎢⎣ α ⋅ F d ⎥⎦
⎣
⎦
F , sono:
⎡ F i,a ⎤ ⎡ F i ⎤
⎢
⎥ ⎢
⎥
⎢ F i,b ⎥ = ⎢ α ⋅ F i ⎥
⎢ F i , c ⎥ ⎢⎣α 2 ⋅ F i ⎥⎦
⎣
⎦
[12.43]
denominate rispettivamente terna omopolare, diretta, inversa.
-
nella terna omopolare le tre grandezze di fase sono coincidenti;
-
nella terna diretta ogni grandezza di fase dista 120° dalla successiva;
-
nella terna inversa ogni grandezza di fase dista 240° dalla successiva.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 63 di 80
Un delle proprietà più significative di cui godono le terne simmetriche è quella di poter eliminare, con un
opportuno processo di equivalentazione, le mutue impedenze in equazioni come quelle della [12.25]. Infatti,
se le 3 correnti al secondo membro sono correnti di una terna simmetrica, allora, considerando ogni fase, è
possibile esprimere le correnti delle altre due fasi in funzione della corrente della fase medesima; per
esempio con una terna diretta vale che:
2
I b = α ⋅ I a; I c = α ⋅ I a
I a = α ⋅ I b;
2
Ic = α ⋅Ib
[12.44]
2
I a = α ⋅ I c; I b = α ⋅ I c
e quindi le c.d.t. della [12.25] possono essere espresse come:
2
ΔU a = Z aa ⋅ I a + Z ab ⋅ I b + Z ac ⋅ I c = Z aa ⋅ I a + Z ab ⋅ α ⋅ I a + Z ac ⋅ α ⋅ I a =
(
)
2
= Z aa + α ⋅ Z ab + α ⋅ Z ac ⋅ I a
2
ΔU b = Z ba ⋅ I a + Z bb ⋅ I b + Z bc ⋅ I c = Z ba ⋅ α ⋅ I b + Z bb ⋅ I b + Z bc ⋅ α ⋅ I b =
(
2
)
[12.45]
= Z bb + α ⋅ Z ba + α ⋅ Z bc ⋅ I b
2
ΔU c = Z ca ⋅ I a + Z cb ⋅ I b + Z cc ⋅ I c = Z ca ⋅ α ⋅ I c + Z cb ⋅ α ⋅ I c + Z cc ⋅ I c =
(
)
2
= Z cc + α ⋅ Z ca + α ⋅ Z cb ⋅ I c
e quindi la [12.25] diventa:
(
)
2
0
0
⎡U a ⎤ ⎡ E a ⎤ ⎡ Z aa + α ⋅ Z ab + α ⋅ Z ac
⎢
2
⎢U ⎥ = ⎢ E ⎥ −
0
α ⋅ Z ba + Z bb + α ⋅ Z bc
⎢ b⎥ ⎢ b⎥ ⎢ 0
2
⎢⎣U c ⎥⎦ ⎢⎣ E c ⎥⎦ ⎢ 0
0
α ⋅ Z ca + α ⋅ Z cb + Z cc
⎣
(
(
)
⎤ ⎡I a ⎤
⎥ ⎢ ⎥
⎥ ⋅ ⎢I b ⎥
⎥ ⎢I ⎥
⎦ ⎣ c⎦
[12.46]
)
ritrovando per altra via, e con valore più generale, quanto già dimostrato con le [12.29÷12.35]. Analoghi
risultati si sarebbero ottenuti con correnti di sequenza omopolare oppure diretta. Si noti bene però che se
anche la terna della correnti è simmetrica, la terna della c.d.t. ottenute in generale non lo sarà, perché i 3
coefficienti sulla diagonale della matrice della [12.46] possono essere, in generale, diversi tra loro.
Riprendendo la [12.43], si noti che in essa i tre vettori di coefficienti:
⎡1⎤
⎢1⎥;
⎢⎥
⎢⎣1⎥⎦
⎡1⎤
⎢ α 2 ⎥;
⎢ ⎥
⎢⎣ α ⎥⎦
⎡1⎤
⎢α⎥
⎢ ⎥
⎢⎣α 2 ⎥⎦
[12.47]
sono 3 vettori tra loro indipendenti; pertanto una loro combinazione lineare è in grado di esprimere
qualunque terna di grandezze di fase o, ribaltando il concetto, qualunque terna, quindi anche una terna
dissimmetrica, di grandezze di fase può essere espressa come combinazione lineare dei tre vettori della
[12.47]. I coefficienti moltiplicativi dei tre vettori saranno i tre valori F d , F i , F o , coincidenti ciascuno con la
grandezza nella fase "a" della rispettiva terna della [12.43]. Vale allora che:
⎡ F a ⎤ ⎡1 1
⎢ ⎥ ⎢
2
⎢ F b ⎥ = ⎢1 α
⎢⎣ F c ⎥⎦ ⎢⎣1 α
1 ⎤ ⎡F o ⎤
⎢ ⎥
α ⎥⎥ ⋅ ⎢ F d ⎥
2
α ⎥⎦ ⎢⎣ F i ⎥⎦
[12.48]
e quindi, invertendo la matrice, vale anche:
⎡F o ⎤
⎡1 1
⎢ ⎥ 1 ⎢
⎢ F d ⎥ = 3 ⋅ ⎢1 α
⎢⎣ F i ⎥⎦
⎢⎣1 α 2
1 ⎤ ⎡F a ⎤
2
⎢ ⎥
α ⎥⎥ ⋅ ⎢ F b ⎥
α ⎥⎦ ⎢⎣ F c ⎥⎦
[12.49]
per cui si può anche scrivere che:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 64 di 80
Fa = Fo + Fd + Fi
2
Fb = Fo + α ⋅ Fd + α⋅ Fi
[12.50]
2
Fc = Fo + α⋅ Fd + α ⋅Fi
o se, si preferisce:
⎡F a ⎤ ⎡F o ⎤ ⎡ F d ⎤ ⎡ F i ⎤
⎢ F ⎥ = ⎢ F ⎥ + ⎢α 2 ⋅ F ⎥ + ⎢ α ⋅ F ⎥
d⎥
i ⎥
⎢
⎢ b⎥ ⎢ o⎥ ⎢
⎢⎣ F c ⎥⎦ ⎢⎣ F o ⎥⎦ ⎢⎣ α ⋅ F d ⎥⎦ ⎢⎣α 2 ⋅ F i ⎥⎦
[12.51]
che a volte si scrive anche come:
⎡ F a ⎤ ⎡ F o, a ⎤ ⎡ F d , a ⎤ ⎡ F i , a ⎤
⎥
⎥ ⎢
⎥ ⎢
⎢ ⎥ ⎢
⎢ F b ⎥ = ⎢ F o,b ⎥ + ⎢ F d ,b ⎥ + ⎢ F i ,b ⎥
⎢⎣ F c ⎥⎦ ⎢ F o , c ⎥ ⎢ F d , c ⎥ ⎢ F i , c ⎥
⎦
⎦ ⎣
⎦ ⎣
⎣
[12.52]
Questa trasformazione fu introdotta da Charles L. Fortescue nel 1918.
Si notino subito alcune proprietà di questa trasformazione:
a)
nel caso in cui la terna al 2° membro sia del tipo previsto dalla [12.29], allora vale che:
(
) (
) (
)
(
)
1
1
1
2
2
F o = ⋅ (F a + F b + F c ) = ⋅ F a + α ⋅ F a + α ⋅ F a = ⋅ 1 + α + α ⋅ F a = 0
3
3
3
1
1
1
2
2
2
F d = ⋅ F a + α ⋅ F b + α F c = ⋅ F a + α ⋅ α ⋅ F a + α ⋅ α ⋅ F a = ⋅3⋅ F a = F a
3
3
3
1
1
1
2
2
2
2
F i = ⋅ F a + α ⋅ F b + α ⋅ F c = ⋅ F a + α ⋅ α ⋅ F a + α ⋅α ⋅ F a = ⋅ 1+ α + α ⋅ F a = 0
3
3
3
(
(
)
)
(
[12.53]
)
cioè: le componente inversa e omopolare sono nulle, mentre la componente diretta è pari al fasore della
fase "a"
b)
in ogni caso (quindi anche dissimmetrico) la componente omopolare è pari alla somma delle grandezze
delle tre fasi divisa per 3; per esempio, se si considerano le correnti del circuito equivalente di Thevenin
di fig. 12.1, tale corrente omopolare è 1/3 della corrente che da terra entra nel nodo "G" (centro stella
della terna di generatori).
In sintesi, allora: qualunque terna fasoriale di grandezze di fase può essere vista come la
sovrapposizione di tre terne, dette terne di sequenza omopolare, diretta, inversa (oppure terne di
sequenza zero, positiva e negativa) per le quali vale che:
-
per la terna diretta, le tre grandezze sono uguali in modulo e con fasi distanti tra loro 120°,
presentandosi nell'ordine le fasi "a", "b", "c" (è quindi la terna che si ha in condizioni di funzionamento
non dissimmetriche);
-
per la terna inversa, le tre grandezze sono uguali in modulo e con fasi distanti tra loro 120°,
presentandosi però nell'ordine le fasi "a", "c", "b" (quindi con ordine invertito rispetto alla terna diretta);
-
per la terna omopolare, le tre grandezze sono uguali in modulo e presentano anche la medesima fase:
sono quindi 3 fasori coincidenti, la cui somma non sarà pari a zero come per le terne diretta e inversa;
tale terna sarà quindi presente solo quando la somma delle grandezze originali di fase sia diversa da
zero.
Si riprenda ora la [12.28] e la si riveda applicando questa trasformazione.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
⎡U o ⎤
⎡1 1
⎢ ⎥ 1 ⎢
⎢U d ⎥ = 3 ⋅ ⎢1 α
⎢⎣U i ⎥⎦
⎢⎣1 α 2
1C - Introduzione agli Impianti Elettrici
p. 65 di 80
1 ⎤ ⎡U a ⎤
⎢ ⎥
α 2 ⎥⎥ ⋅ ⎢U b ⎥ =
α ⎥⎦ ⎢⎣U c ⎥⎦
⎡1 1
1 ⎢
= ⋅ ⎢1 α
3
⎢⎣1 α 2
1 ⎤ ⎡E a ⎤
⎡1 1
1 ⎢
⎥
2⎥ ⎢
α ⎥ ⋅ ⎢ E b ⎥ − ⋅ ⎢1 α
3
⎢⎣1 α 2
α ⎥⎦ ⎢⎣ E c ⎥⎦
1 ⎤ ⎡Zs
α 2 ⎥⎥ ⋅ ⎢⎢ Z m
α ⎥⎦ ⎢⎣ Z m
⎡1 1
1 ⎢
= ⋅ ⎢1 α
3
⎢⎣1 α 2
1 ⎤ ⎡E a ⎤
⎡1 1
1 ⎢
2⎥ ⎢
⎥
α ⎥ ⋅ ⎢ E b ⎥ − ⋅ ⎢1 α
3
⎢⎣1 α 2
α ⎥⎦ ⎢⎣ E c ⎥⎦
1 ⎤ ⎡Zs
2
α ⎥⎥ ⋅ ⎢⎢ Z m
α ⎥⎦ ⎢⎣ Z m
Zm
Zs
Zm
Zm
Zs
Zm
Z m ⎤ ⎡I a ⎤
⎥ ⎢ ⎥
Z m ⎥ ⋅ ⎢I b ⎥ =
Z s ⎥⎦ ⎢⎣ I c ⎥⎦
Z m ⎤ ⎡1 1
2
Z m ⎥⎥ ⋅ ⎢⎢1 α
Z s ⎥⎦ ⎢⎣1 α
[12.54]
1 ⎤ ⎡I o ⎤
α ⎥⎥ ⋅ ⎢⎢ I d ⎥⎥
2
α ⎥⎦ ⎢⎣ I i ⎥⎦
La terna di tensioni del generatore equivalente di Thevenin è già una terna diretta, per cui la sua
trasformazione è immediata:
⎡1 1
1 ⎢
= ⋅ ⎢1 α
3
⎢⎣1 α 2
1 ⎤ ⎡ E a ⎤ ⎡0 ⎤ ⎡0 ⎤
⎢ ⎥ ⎢ ⎥
α 2 ⎥⎥ ⋅ ⎢ E b ⎥ = ⎢ E a ⎥ ≡ ⎢⎢ E d ⎥⎥
α ⎥⎦ ⎢⎣ E c ⎥⎦ ⎢⎣0 ⎥⎦ ⎢⎣0 ⎥⎦
[12.55]
da un punto di vista fisico questo significa che il sistema non ha forzanti (sorgenti di f.e.m.) alle sequenze
inversa e omopolare; questo vale, ovviamente, se nel regime preesistente al guasto non sussistevano
condizioni di dissimmetria.
La trasformazione della matrice delle impedenze di Thevenin fornisce un risultato interessante:
1⎤
1 ⎤ ⎡ Z s Z m Z m ⎤ ⎡1 1
⎡1 1
1 ⎢
2⎥ ⎢
2
⎥
⎢
= ⋅ ⎢1 α α ⎥ ⋅ ⎢ Z m Z s Z m ⎥ ⋅ ⎢1 α
α ⎥⎥ =
3
⎢⎣1 α 2 α ⎥⎦ ⎢⎣ Z m Z m Z s ⎥⎦ ⎢⎣1 α α 2 ⎥⎦
0⎤
0
0 ⎤ ⎡Z o 0
⎡Z s + 2 ⋅ Z m
⎢
⎢
⎥
Zs − Zm
=⎢
0
0 ⎥ ≡ ⎢ 0 Z d 0 ⎥⎥
⎢⎣
Z s − Z m ⎥⎦ ⎢⎣ 0
0 Z i ⎥⎦
0
0
[12.56]
questo può essere dimostrato con un po' di semplice algebra; oppure applicando il principio di
sovrapposizione degli effetti per ciascuna componente di corrente:
-
per la sequenza omopolare la c.d.t. sulla fase "a" vale:
Z s ⋅ I o , a + Z m ⋅ (I o , b + I o , c ) = (Z s + Z m + Z m ) ⋅ I o , a = (Z s + 2 ⋅ Z m ) ⋅ I o , a
[12.57]
ed analogamente sulle altre fasi.
-
per la sequenza diretta, si è già dimostrato con le [12.29÷12.32] e con la [12.46];
-
per la sequenza inversa, la dimostrazione è analoga a quella della sequenza diretta.
Si noti che l'impedenza corrispondente alla sequenza omopolare è diversa da quella alle sequenze diretta e
inversa (tra loro uguali): questo è conseguenza del fatto che per la sequenza omopolare la somma delle tre
correnti è diversa da zero, mentre è nulla per le altre sequenze.
Il risultato della [12.56] è significativo perché nella matrice i valori di mutua impedenza tra le tre sequenze
sono pari a 0, conservando solo gli elementi diagonali.
Attenzione!
questo vale solo se la matrice delle impedenze di Thevenin è del tipo indicato dalla [12.28], cioè se
corrisponde ad un sistema geometricamente simmetrico tra le 3 fasi; nel caso in cui si abbia la più
generica formulazione [12.25], in cui non valgono le uguaglianze tra i vari elementi, la matrice della
[12.56] presenterebbe elementi fuori diagonale.
Questo significherebbe che, per esempio, una terna di corrente di sequenza diretta produrrebbe c.d.t. sia
dirette, che inverse, che omopolari; etc.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 66 di 80
Se poi, nel circuito equivalente di fig. 12.1, il ramo che dal centro stella dei generatori va a terra presentasse
una impedenza di valore Z T , allora questa comporterebbe una ulteriore c.d.t. solo nel caso in cui tale ramo
fosse attraversato da corrente. Questo si verifica quando la somma delle 3 correnti di fase è diversa da zero,
quindi solo in caso di presenza di corrente omopolare. La corrente nel ramo sarebbe pari a 3 ⋅ I o e quindi
l'ulteriore c.d.t. - in serie con quella di ciascuna fase, quindi percettibile con medesimo valore in tutte le fasi,
e per questo definibile come c.d.t. omopolare - sarebbe pari a 3 ⋅ Z T ⋅ I o . La matrice della [12.56]
diventerebbe allora:
⎡Z o
⎢0
⎢
⎢⎣ 0
0
Zd
0
0 ⎤ ⎡Z s + 2 ⋅ Z m + 3 ⋅ Z T
0 ⎥⎥ = ⎢⎢
0
Z i ⎥⎦ ⎢⎣
0
0
Zs − Zm
0
⎤
0 ⎥⎥
Z s − Z m ⎥⎦
0
[12.58]
Concludendo, nel caso favorevole di simmetria geometrica si può allora scrivere che:
⎡U o ⎤ ⎡0 ⎤ ⎡ Z o
⎢U ⎥ = ⎢ E ⎥ − ⎢ 0
⎢ d⎥ ⎢ d⎥ ⎢
⎢⎣U i ⎥⎦ ⎢⎣0 ⎥⎦ ⎢⎣ 0
0 ⎤ ⎡I o ⎤
0 ⎥⎥ ⋅ ⎢⎢ I d ⎥⎥
Z i ⎥⎦ ⎢⎣ I i ⎥⎦
0
Zd
0
[12.59]
e questo risultato è estremamente significativo, perché quello che era un sistema di tre equazioni tra loro
dipendenti [12.28] è diventato ora un insieme di tre equazioni tra loro indipendenti:
U o = −Z o ⋅ I o
U d = Ed − Z d ⋅ I d
U i = −Z i ⋅ I i
[12.60]
potendo quindi infine affermare che gli effetti delle 3 sequenze sono tra loro indipendenti.
Si noti che ogni equazione della [12.60] corrisponde ad una rappresentazione unifilare di un sistema trifase
di tensioni e correnti: di ognuno di questi sistemi viene rappresentata, per tutte, sola la fase "a". Volendo
esplicitare anche le fasi "b" e "c" occorrerebbe scrivere un sistema di 3 equazioni per ognuna delle [12.60];
per esempio la prima equazione andrebbe scritta per esteso come:
⎡U d , a ⎤ ⎡ E d , a ⎤ ⎡ Z d
⎢
⎥ ⎢
⎥ ⎢
⎢U d , b ⎥ = ⎢ E d , b ⎥ − ⎢ 0
⎢U d , c ⎥ ⎢ E d , c ⎥ ⎢⎣ 0
⎦
⎣
⎦ ⎣
0
Zd
0
⎤ ⎡I d ,a ⎤
⎥ ⋅ ⎢I ⎥
⎥ ⎢ d ,b ⎥
Z d ⎥⎦ ⎢⎣ I d , c ⎥⎦
0
0
[12.61]
e analogamente la seconda e la terza. Tuttavia, una scrittura estesa non fornisce alcuna informazione
aggiuntiva, per il semplice fatto che la sequenza è simmetrica e non sono più presenti mutue impedenze;
quindi, noto quello che accade nella fase "a", nelle fasi "b" e "c" avviene la medesima cosa, con eventuali
sfasamenti di 120° o 240° sia per tensioni che per correnti.
Va notato che le 3 impedenze sulla diagonale della matrice nella [12.61] sono tutte uguali fra loro in modulo
e fase; analogo risultato sarebbe ottenuto anche nel caso di sequenza omopolare o inversa. Questo
permetterebbe di affermare che le 3 impedenze alla sequenza diretta della [12.61], come pure quelle delle
altre sequenze, sono una terna omopolare di vettori. Infatti alcuni testi, soprattutto quelli meno recenti,
parlano di sistema omopolare di impedenze alla sequenza diretta (quello della [12.61]) sistema omopolare di
impedenze alla sequenza inversa (matrice con elementi diagonali Z i ), sistema omopolare di impedenze alla
sequenza omopolare (matrice con elementi diagonali Z o ). Questa dicitura, benché corretta dal punto di
vista formale, è ora meno diffusa perché si preferisce utilizzare gli aggettivi "omopolare", "diretta" e "inversa"
solo per i fasori, ovvero per indicare le sequenze di tensioni e correnti a cui le impedenze si riferiscono, e
non agli operatori, ovvero non alle impedenze alle 3 fasi di una sequenza che sono uguali tra loro (fatto
quasi sempre verificato e quindi ritenuto ormai non più significativo) oppure sfasati in maniera simmetrica.
12.2.4 - Sequenze: utilizzo applicativo
Normalmente, per un componente, il costruttore fornisce i valori di impedenza alla sequenza diretta, inversa
e omopolare; se il componente è passivo (linea o trasformatore) le impedenze di sequenza diretta e inversa
sono uguali: differiscono solo per le macchine rotanti.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 67 di 80
Sulla base di questi valori è possibile rappresentare il sistema elettrico mediante tre distinti schemi unifilari,
tra loro indipendenti, relativi alle 3 sequenze, e costruire per ciascuno di essi l'equivalente di Thevenin
(normalmente solo quello alla sequenza diretta presenterà un generatore di f.e.m., gli altri saranno solo
passivi) e/o la matrice delle ammettenze, i cui elementi saranno singole ammettenze e non sottomatrici (3 x
3).
Z
Z
o
Z
d
E
i
d
fig. 12.2
Si ottengono così tre circuiti equivalenti, uno per ogni sequenza, rappresentabili in modo unifilare come in fig.
12.2.
Per una rete che sia elettricamente connessa nel normale funzionamento di regime, dove, in assenza di
dissimmetrie geometriche o di carico, tensioni e correnti sono tutte di sequenza diretta, può capitare che la
corrispondente rete di sequenza omopolare presenti invece dei rami aperti, e quindi sia suddivisa in isole
(per rete connessa si intende una rete in cui per qualunque coppia di nodi della rete esista almeno un
percorso elettrico che li congiunga, e quindi non esistano isole).
Infatti i trasformatori con avvolgimenti tipo "triangolo" oppure "stella isolata" non sono in grado di far fluire
corrente alla sequenza omopolare su tale avvolgimento, e si comportano pertanto come circuiti aperti a tale
sequenza. Può anche capitare che la rete di sequenza omopolare sia tutta aperta nel nodo in cui si calcola
l'equivalente di guasto, e di conseguenza l'impedenza equivalente alla sequenza omopolare sarà infinita.
Su tale argomento si tornerà in seguito, dopo aver esaminato i metodi di calcolo dei vari tipi di guasto. Il
sistema di equazioni [12.25] contiene 6 incognite (le tre tensioni di fase e le tre correnti di fase) e 3
equazioni; analogamente il sistema [12.60], dove le tensioni e le correnti sono le trasformazioni, secondo
leggi note, delle incognite del sistema [12.25]. Occorre quindi fornire 3 ulteriori equazioni perché il sistema
[12.61] possa essere completato. Se le ulteriori equazioni sono espresse in termini di grandezze di fase,
grazie alle [12.49] è possibile convertirle in termini di grandezze di sequenza.
Guasto monofase a terra
Si supponga che il cortocircuito avvenga sulla fase "a". Sia Z g l'eventuale impedenza di guasto.
Considerando allora il circuito equivalente di fig. 12.1, si nota che la corrente di guasto è pari alla corrente
nella fase "a", mentre le altre due fasi rimangono a vuoto. Si possono scrivere le seguenti equazioni:
Ua = Zg ⋅Ia
Ib = 0
Ic = 0
[12.62]
Le correnti di sequenza, grazie alla [12.49], possono allora essere espresse in funzione delle correnti di fase,
che in questo caso di riducono alla sola corrente della fase "a":
⎡I o ⎤
⎡1 1
⎢ I ⎥ = 1 ⋅ ⎢1 α
⎢ d⎥ 3 ⎢
⎢⎣ I i ⎥⎦
⎢⎣1 α 2
1 ⎤ ⎡I a ⎤
I
2
α ⎥⎥ ⋅ ⎢⎢ 0 ⎥⎥ ⇒ I o = I d = I i = a
3
α ⎥⎦ ⎢⎣ 0 ⎥⎦
[12.63]
quindi le correnti delle tre sequenze sono uguali e pari ad 1/3 della corrente di guasto. Inoltre, poiché dalla
[12.48] vale che:
⎡U a ⎤ ⎡1 1
⎢U ⎥ = ⎢1 α 2
⎢ b⎥ ⎢
⎢⎣U c ⎥⎦ ⎢⎣1 α
1 ⎤ ⎡U o ⎤
α ⎥⎥ ⋅ ⎢⎢U d ⎥⎥ ⇒ U a = U d + U i + U o
2
α ⎥⎦ ⎢⎣ U i ⎥⎦
[12.64]
quindi le tensioni delle tre sequenze, sommate, forniscono la tensione del nodo di guasto.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 68 di 80
Le due espressioni [12.63] e [12.64] e la prima equazione della [12.62] indicano allora che i 3 circuiti
equivalenti di fig. 12.2 devono essere tra loro combinati ponendoli l'uno in serie all'altro, e chiudendo poi il
circuito su una impedenza di valore pari a 3 ⋅ Z g . Infatti con tale scelta essi sono percorsi dalla medesima
corrente I o = I d = I i = I a 3 che, chiudendosi sull'impedenza 3 ⋅ Z g , darà una c.d.t. Z g ⋅ I a pari, secondo la
prima equazione della [12.63], alla tensione della fase "a" e quindi alla somma delle tre tensioni di sequenza.
Con tale circuito equivalente è allora facile calcolare che:
Io = Id = Ii =
Ed
Z o + Z d + Z i + 3⋅ Z g
[12.65]
da cui:
Ia =
3⋅ Ed
3⋅ Ea
=
Z o + Z d + Z i + 3⋅ Z g Z o + Z d + Z i + 3⋅ Z g
Ua = Zg ⋅Ia =
3⋅ Z g
Z o + Z d + Z i + 3⋅ Z g
[12.66]
⋅ Ea
Da queste espressioni generali si ricavano quelle relative al guasto franco:
Io = Id = Ii =
Ia =
Ed
Zo + Zd + Zi
[12.67]
3⋅ Ed
3⋅ Ea
=
Zo + Zd + Zi Zo + Zd + Zi
[12.68]
Ua = Zg ⋅Ia = 0
Attenzione!
Tensioni e correnti così calcolate, per questo caso e per i successivi, sono già tensioni e correnti
cumulative dell'effetto preesistente (regime, anche rete scarica) e dell'effetto di guasto. Per esempio,
nell'ultima equazione, la tensione nella fase "a" pari a 0 è la tensione complessiva, quindi si ha una
tensione di guasto tale da annullare la tensione di regime e quindi uguale e contraria ad essa.
Alcune importanti considerazioni vanno fatte sul guasto monofase.
a)
Nel caso in cui l'impedenza equivalente della rete alla sequenza omopolare sia infinita (la rete non
ammette l'ingresso/uscita di corrente omopolare in quel nodo) la corrente di guasto è nulla; si vedrà in
seguito in quali casi questo accade. In assenza di correnti, alle sequenze diretta e inversa non ci sono
c.d.t.; il centro stella G del circuito equivalente della rete (fig. 12.1), sul quale si misura la tensione
omopolare, è invece libero di spostarsi, e (in caso di guasto franco) si porterà quindi ad una tensione
pari a − U a (del regime preesistente), in modo che la tensione del solo effetto di guasto sulla fase "a",
pari alla sola tensione omopolare (all'effetto di guasto), sia uguale e contraria alla tensione nella fase
"a" durante il regime. Ora il nuovo centro stella, che è anche centro del sistema di tensione del
generatore trifase equivalente, è l'estremo della fase "a" e quindi le tensioni nelle fasi "b" e "c", rispetto
a terra, sono aumentate nella misura di 3 : le tensioni di fase verso terra assumono il valore che
normalmente vale per le tensioni concatenate.
b)
Nel caso invece in cui l'impedenza equivalente della rete alla sequenza omopolare sia nulla o
trascurabile (la rete ammette l'ingresso/uscita di grandi valori di corrente omopolare in quel nodo, senza
subire variazioni significative di tensione), il centro stella G non si sposta, e con esso non si sposta il
sistema delle tensioni, ma la corrente di guasto può assumere valori notevoli.
c)
Da queste considerazioni discendono i criteri di messa a terra del centro stella dei trasformatori per i
sistemi elettrici ai vari livelli di tensione. Dalla [12.58] si nota come il valore dell'impedenza di messa a
terra del centro stella sia un parametro molto influente sul valore di impedenza alla sequenza
omopolare. Nel caso di sistemi in AT (132, 150, 220, 380 kV) una situazione come nel caso "a)"
comporterebbe tensioni fase-terra molto elevate, con rischio per la tenuta degli isolamenti. Quindi si
opta per un centro stella francamente a terra. Nel caso di sistemi BT l'aumento della tensione di fase
dal valore stellato (220÷230 V) a quello concatenato (380÷400 V) potrebbe essere sopportato dagli
isolamenti dei cavi di distribuzione, ma non dai dispositivi domestici, quindi anche in questo caso si opta
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 69 di 80
per un centro stella francamente a terra. Nei sistemi MT invece cavi e linee sono ben in grado di
reggere questo incremento di tensione, e si ritiene più opportuno privilegiare la limitazione delle correnti
di guasto, quindi si opta per trasformatori con centro stella isolato oppure a triangolo.
Guasto bifase generalizzato
Si supponga che il cortocircuito avvenga sulla fase "b" e "c". La prima informazione è quindi che la corrente
sulla fase "a" è pari a zero; siano poi definite, con la massima generalità, le eventuali impedenze di guasto:
-
Z g ,bG
tra la fase "b" e la terra;
-
Z g ,cG
tra la fase "c" e la terra;
-
Z g ,bc
tra le fasi "b" e "c".
Questo comporterà che:
I a = 0; I b =
Ub
U −U c
Uc
U −U b
+ b
; Ic =
+ c
Z g ,bG
Z g ,bc
Z g ,cG
Z g ,bc
[12.69]
La parte di rete esterna alla rete originale e quindi esterna all'equivalente, dovuta alla situazione di guasto e
a cui corrispondono le [12.69], potrà allora essere descritta da seguente sistema di equazioni:
⎡I a ⎤ ⎡
⎢I ⎥ = ⎢
⎢ b⎥ ⎢
⎢⎣ I c ⎥⎦ ⎢⎣
⎤ ⎡U a ⎤
0
0
⎥ ⎢ ⎥
− 1 Z g , bc
1 Z g , bG + 1 Z g , bc
⎥ ⋅ ⎢U b ⎥
− 1 Z g , bc
1 Z g , cG + 1 Z g , bc ⎥⎦ ⎢⎣U c ⎥⎦
0
0
0
[12.70]
o, se si preferisce, utilizzando le ammettenze anziché le impedenze:
0
⎡ I a ⎤ ⎡0
⎢ I ⎥ = ⎢0 Y
g , bG + Y g , bc
⎢ b⎥ ⎢
⎢⎣ I c ⎥⎦ ⎢⎣0
− Y g , bc
⎤ ⎡U a ⎤
0
⎥
− Y g , bc ⎥ ⋅ ⎢⎢U b ⎥⎥
Y g , cG + Y g , bc ⎥⎦ ⎢⎣U c ⎥⎦
[12.71]
Questo può essere trasformato in modo da utilizzare terne di grandezze di sequenze simmetriche:
⎡I o ⎤
⎡1 1
⎢ I ⎥ = 1 ⋅ ⎢1 α
⎢ d⎥ 3 ⎢
⎢⎣ I i ⎥⎦
⎢⎣1 α 2
⎡1 1
1 ⎢
= ⋅ ⎢1 α
3
⎢⎣1 α 2
1 ⎤ ⎡I a ⎤
⎡1 1
1 ⎢
2⎥ ⎢
⎥
α ⎥ ⋅ ⎢ I b ⎥ = ⋅ ⎢1 α
3
⎢⎣1 α 2
α ⎥⎦ ⎢⎣ I c ⎥⎦
0
1 ⎤ ⎡0
2⎥ ⎢
α ⎥ ⋅ ⎢0 Y g , bG + Y g ,bc
α ⎥⎦ ⎢⎣0
− Y g , bc
⎤ ⎡U a ⎤
0
0
1 ⎤ ⎡0
⎥
2⎥ ⎢
α ⎥ ⋅ ⎢0 Y g , bG + Y g , bc
− Y g , bc ⎥ ⋅ ⎢⎢U b ⎥⎥ =
α ⎥⎦ ⎢⎣0
− Y g , bc
Y g , cG + Y g , bc ⎥⎦ ⎢⎣U c ⎥⎦
⎤ ⎡1 1
0
⎥
2
− Y g , bc ⎥ ⋅ ⎢⎢1 α
Y g , cG + Y g , bc ⎥⎦ ⎢⎣1 α
1 ⎤ ⎡U o ⎤
α ⎥⎥ ⋅ ⎢⎢U d ⎥⎥
2
α ⎥⎦ ⎢⎣ U i ⎥⎦
[12.72]
La matrice delle ammettenze alle sequenze simmetriche che si ottiene sviluppando il prodotto matriciale
della [12.72] sarà una matrice piena; questo significa che i tre circuiti di sequenza, lato guasto, non saranno
più indipendenti tra loro. In questo caso di massima generalità allora l'utilizzo delle sequenze simmetriche
non porta particolari vantaggi, non essendo più in essere il disaccoppiamento tra di esse; tale strada è
comunque possibile, ma in questa sede non verrà approfondita ulteriormente, anche perché la valutazione o
la stima di 3 distinte impedenze di guasto è praticamente impossibile.
Si esamineranno invece tre sottocasi:
-
il guasto bifase a terra, dove l'impedenza di guasto Z g ,bc tra fase e fase si consideri nulla e vi sia
un'unica impedenza Z g tra il punto di guasto e la terra;
-
il guasto bifase isolato, dove le impedenze di guasto Z g ,bG e Z g ,cG fase-terra si considerino infinite;
-
il doppio guasto monofase, dove l'impedenza di guasto Z g ,bc tra fase e fase si consideri infinita; ma
si verificherà che anche questo caso comporta la presenza di mutue impedenze tra le varie sequenze,
quindi la trattazione non verrà completata.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 70 di 80
Guasto bifase a terra
Si supponga che il cortocircuito avvenga sulle fasi "b" e "c". La prima informazione è quindi che la corrente
sulla fase "a" è pari a zero; è poi definita l'eventuale impedenza di guasto Z g tra il punto di guasto, comune
alle fase "b" e "c", e la terra.
Questo comporterà che:
Ia = 0
U b = Z g ⋅ (I b + I c )
Uc =Ub
[12.73]
Da queste equazioni discende che:
1
1
I o = ⋅ (I a + I b + I c ) = ⋅ (I b + I c )
3
3
1
1
U o = ⋅ (U a + U b + U c ) = ⋅ (U a + 2 ⋅ U b )
3
3
1
1
1
2
2
U d = ⋅ U a + α ⋅ U b + α ⋅ U c = ⋅ U a + α + α ⋅ U b = ⋅ (U a − U b )
3
3
3
1
1
1
2
2
U i = ⋅ U a + α ⋅ U b + α ⋅ U c = ⋅ U a + α + α ⋅ U b = ⋅ (U a − U b )
3
3
3
(
(
) (
) (
(
(
[12.74]
) )
) )
e questo significa che:
-
il circuito di sequenza omopolare è attraversato dalla somma delle due correnti di guasto divisa per 3;
-
i circuiti di sequenza diretta e inversa sono sottoposti alla medesima differenza di potenziale, quindi
possono essere considerati in parallelo; si andrà quindi a verificare quanto valga la somma delle
correnti in tali due circuiti.
Tale somma è data da:
(
(
) (
) (
)
)
1
1
2
2
Id = ⋅ Ia + α⋅Ib + α ⋅Ic = ⋅ α⋅Ib + α ⋅Ic
3
3
1
1 2
2
Ii = ⋅ Ia + α ⋅Ib + α⋅Ic = ⋅ α ⋅Ib + α⋅Ic
3
3
1
1
2
I d + I i = ⋅ α + α ⋅ (I b + I c ) = − ⋅ (I b + I c ) = − I o
3
3
(
[12.75]
)
e questo significa che la corrente che attraversa il parallelo dei circuiti di sequenza diretta e inversa è pari
alla corrente di sequenza omopolare cambiata di segno, ed è pari ad un terzo della somma delle due
correnti di guasto; quindi il parallelo dei circuiti di sequenza diretta e inversa è posto in serie con il circuito di
sequenza omopolare capovolto; si andrà allora a calcolare la tensione complessiva risultante:
1
1
ΔU = U d − U o = U i − U o = ⋅ (U a − U b ) − ⋅ (U a + 2 ⋅ U b ) = −U b = − Z g ⋅ (I b + I c ) =
3
3
= − Z g ⋅ 3 ⋅ I 0 = 3 ⋅ Z g ⋅ (− I 0 )
[12.76]
quindi la serie dei circuiti suddetti può essere richiusa sull'impedenza di guasto, arrivando così ad una rete di
cui si può trovare la soluzione:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
Z
1C - Introduzione agli Impianti Elettrici
o
Z
I
I
o
I
d
Z
3Z
i
Z
d
p. 71 di 80
g
Z
→
d
Z
o
i
i
3Z
Ed
g
figg. 12.3 e 12.4
Questa rete si risolve con il metodo dei potenziali di nodo:
U d − Ed U d
Ud
+
+
=0
Zd
Zi Zo + Z g
( (
)
(
)
)
U d ⋅ Z i ⋅ Z o + Z g + Z d ⋅ Z o + Z g + Z d ⋅ Z i = Ed ⋅ Z d
Ud =
(
Zi ⋅ Zo + Z g
)
[12.77]
Zd
⋅ Ed
+ Zd ⋅ Zo + Z g + Zd ⋅ Zi
(
)
Quindi, dalla figura:
Ui =Ud
[12.78]
− Zo
Uo =
⋅U d
Zo + Zg
etc.
Guasto bifase isolato
Si supponga che il cortocircuito avvenga sulle fasi "b" e "c". La prima informazione è quindi che la corrente
sulla fase "a" è pari a zero; è poi definita l'eventuale impedenza di guasto Z g tra le due fasi "b" e "c".
Questo comporterà che:
Ia = 0
I b = −I c
Ub −U c = Z g ⋅ Ib
[12.79]
Da queste equazioni discende che:
1
1
I o = ⋅ (I a + I b + I c ) = ⋅ (I b − I b ) = 0
3
3
1
1
3
2
2
⋅Ib
Id = ⋅ Ia + α⋅Ib + α ⋅Ic = ⋅ α −α ⋅Ib = j
3
3
3
1
1 2
3
2
⋅Ib
Ii = ⋅ Ia + α ⋅Ib + α⋅Ic = ⋅ α −α ⋅Ib = − j
3
3
3
(
(
) (
) (
Versione 1.00 - novembre 2010
)
)
[12.80]
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 72 di 80
e questo significa che:
-
il circuito di sequenza omopolare è a vuoto, quindi non deve essere considerato;
-
i circuiti di sequenza diretta e inversa sono percorsi dalla medesima corrente, ma cambiata di segno;
saranno quindi posti in serie, ma con il circuito di sequenza inversa posto in opposizione.
Inoltre:
2
U b = U o + α ⋅U d + α ⋅U i
2
U c = U o + α ⋅U d + α ⋅U i
(
[12.81]
)
U b − U c = α − α ⋅ (U d − U i ) = − j 3 ⋅ (U d − U i )
2
quindi, collegando questo alla [12.80]:
U d −U i =
1
1
1
3
⋅ (U b − U c ) =
⋅Z g ⋅Ib =
⋅Zg ⋅
⋅Id = Zg ⋅Id
−j 3
−j 3
−j 3
j 3
[12.82]
e questo significa che i circuiti di sequenza possono essere chiusi in una maglia come da figura:
Z
Z
d
i
Ed
fig. 12.5
Questa rete si risolve con il metodo delle correnti di maglia:
Id =
Ed
Zd + Zi + Z g
I i = −I d
Io = 0
[12.83]
etc.
12.2.5 - Parametri di rete alla sequenza omopolare - Tipi di connessione dei trasformatori
Gli avvolgimenti dei trasformatori possono essere connessi in diverse maniere. Le principali sono:
1)
a triangolo;
2)
a stella, con centro stella isolato;
3)
a stella, con centro stella a terra mediante impedenza;
4)
a stella, con centro stella francamente a terra;
5)
a zig-zag.
Il caso "5)" (a zig-zag) non verrà considerato. Il caso "4)" (a stella, con c.s. francamente a terra) verrà
classificato come di tipo "3)" (a stella, con c.s. a terra mediante impedenza), con valore di impedenza pari a
zero. Quindi i tipi considerati, e i relativi simboli, saranno solo:
1)
Δ
a triangolo;
2)
Υ
a stella, con centro stella isolato;
3)
ΥZt a stella, con centro stella a terra mediante impedenza.
Nel caso di trasformatori a 2 avvolgimenti (per semplicità quelli con maggior numero di avvolgimenti non
saranno considerati) le combinazioni possibili sono riportati nella tabella seguente, e per ciascuna
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 73 di 80
combinazione si discuterà il comportamento alle sequenza omopolare. In particolare si indicheranno i tre
parametri del circuito equivalente a Π alla sequnza omopolare (Y 01,o ; Z l ,o ; Y 02 ,o ), con i valori espressi in
p.u. di macchina e quindi senza doversi preoccupare del rapporto spire. Occorre qui ricordare che nel caso
in cui i tre avvolgimenti di un circuito a triangolo siano percorsi da correnti uguali in modulo e fase, queste
correnti si limitano a circolare nel triangolo senza entrare o uscire dai morsetti di fase.
Avv. 1 Avv. 2 Note su avvolgimento 1
Δ
Δ
Δ
Υ
Δ
Υ
ΥZt
Υ
Note su avvolgimento 2
circuito equival. alla sequenza omopolare
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Y 01,o = 0; Z l ,o = ∞; Y 02,o = 0
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare;
tuttavia nel triangolo può
circolare corrente, uguale
in ogni lato, senza
uscire/entrare dai morsetti
di fase
La corrente di sequenza
omopolare può
entrare/uscire; essa viene
riportata al primario dove
circola nel triangolo senza
uscire/entrare dai morsetti
di fase
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
il trasformatore è un circuito aperto alla
sequenza omopolare
Y 01,o = 0; Z l ,o = ∞; Y 02,o = 0
il trasformatore è un circuito aperto alla
sequenza omopolare
Y 01,o = 0; Z l ,o = ∞;
Y 02 ,o =
Z cc
1
+ 3⋅ Z t2
il trasformatore alla sequenza omopolare è un
circuito aperto all'avv. 1, mentre all'avv. 2 è un
ramo verso terra con impedenza pari
all'impedenza di cortocircuito + 3 volte
l'impedenza di messa a terra del c.s.
Y 01,o = 0; Z l ,o = ∞; Y 02,o = 0
il trasformatore è un circuito aperto alla
sequenza omopolare
Υ
ΥZt
Per il principio di Kirchhoff
ai nodi non può entrare o
uscire corrente di
sequenza omopolare
Per il principio di Kirchhoff
Y 01,o = 0; Z l ,o = ∞;
ai nodi, la corrente di
sequenza omopolare
1
Y 02,o =
potrebbe entrare o uscire;
Z m ,o + 3 ⋅ Z t 2
ma non avendo modo di
fare lo stesso al primario,
il trasformatore alla sequenza omopolare è un
essa è nulla anche sul
circuito aperto all'avv. 1, mentre all'avv. 2 è un
secondario, fatta salva la
ramo verso terra con impedenza pari
corrente di
all'impedenza di magnetizzazione (più una
magnetizzazione alla
sequenza omopolare (vedi frazione dell'impedenza di cortocircuito) + 3
volte l'impedenza di messa a terra del c.s
discussione seguente)
ΥZt
ΥZt
La corrente di sequenza
omopolare può
entrare/uscire; essa viene
riportata al primario con il
medesimo valore, fatto
salvo il rapporto spire e la
corrente di
magnetizzazione
La corrente di sequenza
Y 01,o = 0; Y 02,o = 0;
omopolare può
entrare/uscire; essa viene
Z l ,o = 3 ⋅ Z t1 + Z cc + 3 ⋅ Z t 2
riportata al secondario con
il medesimo valore, fatto
il trasformatore alla sequenza omopolare è un
salvo il rapporto spire e la
circuito (in p.u., quindi senza doversi
corrente di
preoccupare del rapporto spire) con
magnetizzazione alla
impedenza longitudinale pari all'impedenza di
sequenza omopolare (vedi cortocircuito + 3 volte l'impedenza di messa a
discussione seguente)
terra del c.s. avv. 1 + 3 volte l'impedenza di
messa a terra del c.s. avv. 2
Tabella 12.1: impedenze dei circuiti equivalenti di sequenza per i trasformatori a 2 avvolgimenti
Una discussione particolare merita la corrente di magnetizzazione alla sequenza omopolare. Si riprendono
qui brevemente le equazioni (trifasi) di funzionamento di un trasformatore a 2 avvolgimenti, con le seguenti
convenzioni:
-
i pedici a lettere maiuscole (A, B, C) si usano per le grandezze di fase del primario;
-
i pedici a lettere minuscole (a, b, c) si usano per le grandezze di fase del secondario;
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 74 di 80
-
l'apice " ' " significa che una grandezza del secondario è stata riportata al primario mediante il rapporto
spire;
-
per le grandezze del primario si utilizza le convenzione degli utilizzatori, per le grandezze al secondario
si utilizza la convenzione dei generatori.
Vale quindi:
UA =
RA I A + jωLAA I A + jωM AB I B + jωM AC I C
U B = RB I B + jωM BA I A + jωLBB I B + jωM BC I C
U C = RC I C + jωM CA I A + jωM CB I B + jωLCC I C
− jωM Aa ' I ′a − jωM Ab ' I ′b − jωM Ac ' I ′c
− jωM Ba ' I ′a − jωM Bb ' I ′b − jωM Bc ' I ′c
− jωM Ca ' I ′a − jωM Cb ' I ′b − jωM Cc ' I ′c
[12.84]
(una formula analoga vale per le tensioni di fase al secondario).
Nell'ipotesi di perfetta simmetria geometrica, allora le autoinduttanze sono uguali in tutte le fasi, e così pure
sono tutte uguali fra loro le mutue induttanze, non solo tra fasi diverse del medesimo avvolgimento (primario
oppure secondario), ma anche tra fasi diverse di avvolgimenti diversi; faranno eccezione le mutue tra fasi
uguali di avvolgimenti diversi, che saranno comunque uguali fra loro. Per generalità infatti poniamo:
RA = RB = RC = R1
[12.85]
LAA = LBB = LCC = L1d + L1 f + L1m
dove:
L1d è l'induttanza di dispersione relativa a flussi concatenati solo con quella fase di quell'avvolgimento
(primario);
L1 f è l'induttanza di dispersione relativa a flussi concatenati solo con quella fase su entrambi gli
avvolgimenti (primario e secondario); tali flussi si richiudono anche sul cassone o su eventuali colonne
prive di avvolgimenti nel caso di trasformatori con nucleo a mantello;
L1m è l'induttanza relativa al flusso principale, che poi si suddividerà in parti uguali nelle colonne delle altre
due fasi (ipotesi di perfetta simmetria geometrica).
e dove solitamente vale che: L1d << L1 f << L1m .
Quindi:
M AB = M BA = M AC = K = M Ab ' = M b ' A = K = −
L1m
2
[12.86]
M Aa ' = M Bb ' = M Cc ' = L1 f + L1m
Quindi, con tali ipotesi, la [12.84] diventa, per esempio per la fase "A":
(
(
))
U A = R1 + jω L1d + L1 f + L1m I A − jω
(
)
L1m
(I B + I C )− jω L1 f + L1m I ′a + jω L1m (I ′b + I ′c )
2
2
[12.87]
Nel caso di funzionamento con grandezze (correnti) di sequenza diretta oppure inversa, dove la somma
delle tre correnti fase è pari a 0, è immediato dimostrare che questa equazione diventa:
⎛
3
3
⎛
⎞⎞
⎛
⎞
U A = ⎜⎜ R1 + jω⎜ L1d + L1 f + L1m ⎟ ⎟⎟ I A − jω⎜ L1 f + L1m ⎟ I ′a =
2
2
⎝
⎠⎠
⎝
⎠
⎝
= (R1 + jX 1 )I A + jX m , d / i (I A − I ′a )
[12.88]
dove quindi:
3
⎛
⎞
X m ,d / i = ω⎜ L1 f + L1m ⎟
2
⎝
⎠
[12.89]
è l'impedenza di magnetizzazione alla sequenza diretta/inversa
I A − I ′ a = I 0, A
[12.90]
è la corrente di magnetizzazione (fase "A", vista al primario)
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 75 di 80
Invece, nel caso di funzionamento con grandezze (correnti) di sequenza omopolare, la [12.88] diventa:
(
(
))
U A = R1 + jω L1d + L1 f + L1m I A, o − jω
(
)
L1m
(I B,o + I C ,o ) +
2
L1m
(I b',o + I c',o ) =
2
I A, o − jωL1 f I a ', o =
− jω L1 f + L1m I a ', o + jω
(
(
= R1 + jω L1d + L1 f
[12.91]
))
= (R1 + jX 1 )I A, o + jX m, o (I A, o − I ′a , o )
dove quindi:
X m , o = ωL1 f
[12.92]
è l'impedenza di magnetizzazione alla sequenza omopolare.
Questo risultato matematico rispecchia la fisica della situazione: mentre con 3 correnti di sequenza diretta o
inversa il flusso prodotto da ciascuna fase si suddivide nelle altre due colonne e rafforza quello generato in
tali colonne dalle rispettive correnti, con 3 correnti uguali il flusso prodotto da ciascuna fase si suddivide nelle
altre due colonne andando ad annullare in tali colonne il flusso generato dalle rispettive correnti.
La [12.88] (o le analoghe per le fasi "B" e "C") mostra(no) quindi come l'impedenza di magnetizzazione alla
sequenza omopolare sia solitamente molto inferiore rispetto a quella alla sequenza diretta/inversa; valori
tipici sono:
X m , d / i = 100 ÷ 500 p.u.
X m , o = 0.5 ÷ 2.0 p.u.
quindi l'impedenza di magnetizzazione alla sequenza omopolare è circa 100 volte inferiore di quella alla
sequenza diretta, anche se nel caso di trasformatori con nucleo a 5 colonne, o anche solo con cassone in
ferro di spessore rilevante e molto vicino al nucleo magnetico, essa assume valori maggiori di quelli indicati.
La tabella della pagina precedente mostra come in molti casi i trasformatori si comportino come circuiti
aperti. Come conseguenza, una rete elettrica che nel normale funzionamento di regime (sequenza diretta) si
presenti elettricamente non disgiunta, alla sequenza omopolare può invece essere composta di più isole e
da nodi isolati. Alcune isole possono anche essere prive di collegamenti verso terra, rendendo così singolare
la corrispondente sottomatrice delle ammettenze nodali; così pure alcuni nodi isolati, per i quali quindi il
corrispondente elemento diagonale nella matrice delle ammettenze nodali è nullo. Nel caso di calcolo
automatico (con programmi come MATLAB o altri prodotti o subroutine in grado di eseguire l'inversione di
una matrice o di risolvere un sistema lineare) queste singolarità danno luogo a divisioni per zero, con il
rischio di interruzione del calcolo per errori. Occorre allora prendere alcune contromisure, tra le quali una
delle più utilizzate è quella di porre valori molto piccoli di ammettenza negli elementi diagonali, in modo da
ottenere impedenze equivalenti molto elevate (e quindi assimilabili ad un valore infinito) nei nodi
corrispondenti. Nel calcolo manuale basta ricordare che nelle parti di rete isolate alla sequenze omopolare
non può esistere tale corrente.
12.3 - Esempio numerico
Sia data la rete in figura:
132 kV
132 kV
Yt/d
15 kV
Nodo 1
Nodo 2
Scc=200 MVA
15 kV
Nodo 3
30 km
D/y
6 kV
An=40 MVA
1 km
Nodo 4
An=10 MVA
Nodo 5
An=6 MVA
An=30 MVA
fig. 12.6
A monte del Nodo 1, da considerarsi come nodo di saldo, è presente una rete di potenza prevalente.
I dati della rete e dei componenti sono i seguenti:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 76 di 80
-
frequenza nominale 50 Hz
-
rete prevalente: potenza di cortocircuito 200 MVA con f.p. 0.1 per guasto trifase; in caso di guasto
monofase la corrente di guasto monofase è 1.2 volte superiore alla corrente di guasto trifase, e con f.p.
0.2;
-
linea aerea a 132 kV: r=0.054 Ω/km, x=0.380 Ω/km, c=9.6 nF/km, lungh.=30 km; alla sequenza
omopolare: ro/r=4, xo/x=3, co/c=2/3;
-
trasformatore AT/MT: 132 kV / 15 kV, An=40 MVA; zcc=0.12 p.u.; pCu=0.004 p.u.; corrente di
magnetizzazione e perdite nel ferro trascurabili; connessioni Yt/d (stella francamente a terra / triangolo);
-
generatore: An=30 MVA; ra=0.0045 p.u.; x"d=0.180 p.u.; x'd=0.270 p.u.; xi=0.240 p.u.; xo=0.135 p.u.;
avvolgimenti statorici a stella con c.s. a terra mediante resistenza da 86.6 Ω;
-
cavo MT 3x150 mm2, portata 400 A: r=0.162 Ω/km; x=0.097 Ω/km; c=240 nF/km; lungh=1 km; ro/r=4;
xo/x=3; co/c=1
-
trasformatore MT/MT: 15 kV / 6 kV, An=10 MVA; zcc=0.10 p.u.; pCu=0.006 p.u.; corrente di
magnetizzazione e perdite nel ferro trascurabili; connessioni D/y (triangolo / stella isolata);
-
motore: An=6 MVA; Isp/In = 4.5; r/x = 0.2 in cortocircuito.
Calcolare la corrente di cortocircuito subtransitoria trifase e monofase nei nodi 2 e 4 e i rispettivi contributi
dai vari rami della rete.
12.3.1 - Risoluzione
Si procede per varie fasi:
-
fase 1: costruzione dei circuiti equivalenti a Π per tutti i rami della rete alla seq. diretta;
-
fase 2: costruzione dei circuiti equivalenti a Π per tutti i rami della rete alla seq. inversa;
-
fase 3: costruzione dei circuiti equivalenti a Π per tutti i rami della rete alla seq. omop.;
-
fase 4: costruzione delle matrici delle ammettenze nodali alle tre sequenze;
-
fase 5: calcolo dell'impedenza equiv. di guasto nei nodi indicati, alle tre sequenze;
-
fase 6: calcolo della corrente di cortocircuito nei nodi indicati;
-
fase 7: calcolo dei vettori colonna delle matrici delle impedenze nodali;
-
fase 8: calcolo c.d.t. nei vari nodi alle varie sequenze;
-
fase 9: calcolo dei transiti di corrente (contributi al guasto).
Il processo di calcolo sarà quindi lungo e laborioso.
12.3.2 - Fasi di calcolo 1, 2, 3
Per prima cosa occorre scegliere una potenza di riferimento per l'intero sistema. Essendo in gioco potenze
nominali differenti, per non scontentare nessuno si sceglie una potenza "neutrale": 100 MVA.
Rete prevalente
Viene modellizzata mediante una impedenza a terra nel Nodo 1. Se per tale rete si ha una potenza di
cortocircuito di 200 MVA, questo significa che la rete a monte può essere rappresentata con una impedenza
di 1 p.u. nel riferimento di 200 MVA, e tenendo conto del fattore di potenza:
Z& cc , 200 MVA = 0.100 + j 0.995
che, nel riferimento di 100 MVA, diventa:
Z& cc = 0.050 + j 0.497
Poiché in caso di guasto monofase la corrente di guasto è maggiore di 1.2 volte con f.p. 0.2, allora occorre
che l'impedenza complessiva di guasto monofase equivalente all'intera rete a monte sia 1.2 volte inferiore a
quella indicata, quindi in modulo sia 0.5/1.2; tenendo conto del f.p.:
Z& cc, monof = ⎛⎜ 0.2 + j 1 − 0.2 2 ⎞⎟ ⋅ 0.5 / 1.2 = 0.083 + j 0.408
⎝
⎠
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 77 di 80
e poiché (dalla teoria del guasto monofase) si ha che:
Z&
+ Z& cc , i + Z& cc , o
Z& cc , monof = cc , d
⇒ Z& cc , o = 3 ⋅ Z& cc, monof − Z& cc , d − Z& cc , i =
3
= 3 ⋅ Z& cc , monof − 2 ⋅ Z& cc = 0.149 + j 0.229
dove si è ipotizzato che l'impedenza alla sequenza inversa fosse pari all'impedenza alla sequenza diretta.
Linea aerea a 132 kV
Un calcolo esatto richiederebbe l'utilizzo delle formule derivanti dall'equazione dei telegrafisti; ci si
accontenta di un calcolo approssimato (ma la differenza è davvero molto piccola). L'impedenza base vale:
Zb =
-
132 2
= 174.24Ω
100
alla sequenza diretta/inversa si ha: R=1.620 Ω, X=11.400 Ω, B/2=15⋅ω⋅9.6⋅10-9 = 45 μS, che in p.u.
diventano:
Z& l = 0.0093 + j 0.0654
Y& 01 = Y& 02 = j 0.0078
-
alla sequenza omopolare, applicando i coefficienti moltiplicativi per resistenze, reattanze e capacità:
Z& l , o = 0.0372 + j 0.1962
Y& 01, o = Y& 02, o = j 0.0052
Trasformatore AT/MT
E' sufficiente un banale riporto delle impedenze:
100 &
Z& cc , 40 MVA = 0.004 + j 0.120 ⇒ Z& cc =
⋅ Z cc, 40 MVA = 0.010 + j 0.300
40
da cui:
-
alla sequenza diretta/inversa:
Z& l = 0.010 + j 0.300
Y& 01 = Y& 02 = 0
-
alla sequenza omopolare, riprendendo la tabella di pag. 26:
Z& l , o = ∞
Y& 01, o =
1
= 0.111 − j 3.330;
0.010 + j 0.300
Y& 02, o = 0
Generatore
Viene modellizzato mediante una impedenza a terra pari a ra + j x"d; va anche questa riportata a 100 MVA:
100
Z& ′′d =
⋅ (0.0045 + j 0.180 ) = 0.015 + j 0.600
30
Alla sequenza inversa:
100
Z& ′′i =
⋅ (0.0045 + j 0.240 ) = 0.015 + j 0.800
30
Alla sequenza omopolare occorre anche mettere in conto la resistenza di messa a terra del centro stella,
aggiungendo all'impedenza omopolare il triplo del valore di tale resistenza. Si calcola allora l'impedenza
base a 15 kV, 100 MVA:
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Zb =
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 78 di 80
152
= 2.250Ω
100
da cui:
3 ⋅ RT 3 ⋅ 86.6
=
= 115.47p.u.
2.250
Zb
quindi:
100
Z& ′′o =
⋅ (0.0045 + j 0.135) + 115.47 = 115.485 + j 0.450
30
(si noti che l'impedenza dovuta alla resistenza di messa a terra prevale di gran lunga sull'impedenza
omopolare del generatore).
Linea in cavo a 15 kV
Un calcolo esatto richiederebbe l'utilizzo delle formule derivanti dall'equazione dei telegrafisti; ci si
accontenta di un calcolo approssimato (ma la differenza è davvero molto piccola). L'impedenza base vale:
Zb =
-
152
= 2.250Ω
100
alla sequenza diretta/inversa, con lunghezza 1 km, si ha: R=0.162 Ω, X=0.097 Ω, B/2=0.5⋅ω⋅240⋅10-9 =
37.7 μS, che in p.u. diventano:
Z& l = 0.0720 + j 0.0431
Y& 01 = Y& 02 = j 0.000085
-
alla sequenza omopolare, applicando i coefficienti moltiplicativi per resistenze, reattanze e capacità:
Z& l , o = 0.2880 + j 0.1293
Y& 01, o = Y& 02, o = j 0.000085
Trasformatore MT/MT
E' sufficiente un banale riporto della impedenze:
100 &
Z& cc ,10 MVA = 0.006 + j 0.099 ⇒ Z& cc =
⋅ Z cc ,10 MVA = 0.060 + j 0.998
10
da cui:
-
alla sequenza diretta/inversa:
Z& l = 0.060 + j 0.998
Y& 01 = Y& 02 = 0
-
alla sequenza omopolare, riprendendo la tabella 12.1:
Z& l , o = ∞
Y& 01, o = 0; Y& 02, o = 0
Motore asincrono
Viene modellizzato mediante una impedenza a terra. La corrente di cortocircuito è circa uguale alla corrente
di spunto, quindi nel p.u. di macchina l'impedenza subtransitoria vale 1/4.5; tenendo conto del rapporto r/x:
0.2 + j1.0
1
Z& ′′cc , 6 MVA =
⋅
= 0.0427 + j 0.2137
2
2 4 .5
0 .2 + 1 .0
100 &
Z& ′′cc =
⋅ Z ′′cc , 6 MVA = 0.712 + j 3.561
6
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 79 di 80
Si utilizzerà tale valore anche alla sequenza inversa.
Poiché il trasformatore MT/MT separa il motore dalla rete alla sequenza omopolare, il valore di impedenza
omopolare del motore non è di alcuna utilità (e comunque solitamente i motori sono con avvolgimento a
triangolo oppure a stella con c.s. isolato, quindi tale impedenza è di valore infinito).
Tabella di sintesi alla sequenza diretta:
Componente
Zshunt oppure Zl (p.u.)
Y01 (p.u.)
Y02 (p.u.)
Rete prev. in Nodo 1
0.050+j0.497
//
//
Linea 1-2
0.0093+j0.0654
j0.0078
j0.0078
Trasformatore 2-3
0.010+j0.300
0
0
Generatore in Nodo 3
0.015+j0.600
Linea 3-4
0.0720+j0.0431
//
//
Trasformatore 4-5
0.060+j0.998
0
0
Motore in Nodo 5
0.712+j3.561
//
//
j0.000085
j0.000085
Tabella di sintesi alla sequenza inversa:
Componente
Zshunt oppure Zl (p.u.)
Y01 (p.u.)
Y02 (p.u.)
Rete prev. in Nodo 1
0.050+j0.497
//
//
Linea 1-2
0.0093+j0.0654
j0.0078
j0.0078
Trasformatore 2-3
0.010+j0.300
0
0
Generatore in Nodo 3
0.015+j0.800
//
//
Linea 3-4
0.0720+j0.0431
j0.000085
j0.000085
Trasformatore 4-5
0.060+j0.998
0
0
Motore in Nodo 5
0.712+j3.561
//
//
Y01 (p.u.)
Y02 (p.u.)
Tabella di sintesi alla sequenza omopolare:
Componente
Zshunt oppure Zl (p.u.)
Rete prev. in Nodo 1
0.149+j0.229
//
//
Linea 1-2
0.0372+j0.1962
j0.0052
j0.0052
Trasformatore 2-3
∞
1 / (0.010+j0.300)
0
Generatore in Nodo 3
115.485+j0.450
//
//
Linea 3-4
0.2880+j0.1293
j0.000085
j0.000085
Trasformatore 4-5
∞
0
0
Motore in Nodo 5
//
//
//
12.3.3 - Fase di calcolo 4
Con le tabelle di sintesi è immediata la costruzione della matrice delle ammettenze nodali. Topologicamente
queste matrici hanno la seguente struttura:
⎡X
⎢X
⎢
seq. dir./inv.: ⎢ 0
⎢
⎢0
⎢⎣ 0
X
X
0
X
0
0
X
0
X
X
X
X
0
0
X
0⎤
0 ⎥⎥
0 ⎥ seq. omop.:
⎥
X⎥
X ⎥⎦
⎡X
⎢X
⎢
⎢0
⎢
⎢0
⎢⎣ 0
X
X
0
0
0
0
0
0
X
X
X
X
0
0
0
0⎤
0⎥⎥
0⎥
⎥
0⎥
? ⎥⎦
dove con "X" si indica il generico elemento diverso da zero. La matrice alla sequenza omopolare è costituita
da due sottomatrici (2 x 2), corrispondenti alle sottoreti composte dai nodi (1,2) e (3,4), e da un elemento
diagonale di valore indefinito, corrispondente al nodo isolato 5 (porre un valore fittizio diverso da 0, meglio se
molto piccolo in modo da avere impedenza molto grandi). Le due sottoreti sono entrambe dotate di rami
verso terra, quindi le rispettive sottomatrici non sono singolari.
Versione 1.00 - novembre 2010
A.A. 2010-2011
G. Pasini
Corso di Impianti Elettrici Industriali
1C - Introduzione agli Impianti Elettrici
p. 80 di 80
La parte numerica di questa fase sarà riportata in una versione successiva.
12.3.4 - Fasi di calcolo 5 e 7
Per il guasto nel nodo "2" occorre risolvere il sistema:
⎡X
⎢X
⎢
⎢0
⎢
⎢0
⎢⎣ 0
X
X
X
0
0
0
X
X
X
0
0
0
X
X
X
0 ⎤ ⎡ Z12 ⎤ ⎡0⎤
0 ⎥⎥ ⎢⎢ Z 22 ⎥⎥ ⎢⎢1⎥⎥
0 ⎥ ⋅ ⎢ Z 32 ⎥ = ⎢0⎥
⎥ ⎢ ⎥ ⎢ ⎥
X ⎥ ⎢ Z 42 ⎥ ⎢0⎥
X ⎥⎦ ⎢⎣ Z 52 ⎥⎦ ⎢⎣0⎥⎦
alla sequenza diretta, inversa, e omopolare (a tale sequenza la topologia è diversa perché alcuni elementi
sono nulli). Analogamente nel nodo "4", ottenendo la colonna 4 della matrice delle impedenze nodali e
ponendo il termine noto "1" nella riga 4 anziché nella riga 2 del vettore colonna dei termini noti. Per la
topologia matriciale, è facile risolvere il sistema per sostituzione, partendo per esempio dal fondo (si esprime
tutto in funzione di Z52 o di Z 54 ).
12.3.5 - Fasi di calcolo rimanenti
Le rimanenti fasi (6, 8 e 9) sono lasciate al lettore.
*
Versione 1.00 - novembre 2010
*
*
A.A. 2010-2011
Scaricare