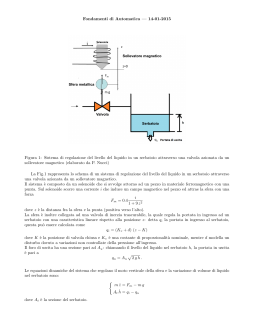
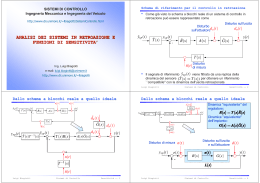
Caratteristiche del controllo a catena aperta: un esempio Controllo di velocità di una automobile • uscita : velocità • variabile manipolabile : angolo pedale acceleratore • disturbo: pendenza della strada • Incertezze sul modello: peso automobile Modello autoveicolo (‘semplificato’): v(t)=10α(t) cioè G(s)=10 (sistema statico, non ha transitorio) Controllo a catena aperta: il sistema di controllo non ha informazioni sull’uscita del processo Supponiamo di volere seguire un segnale di riferimento vrif(t)=costante=50km/h Scegliamo per il sistema di controllo una f.d.t C(s)=1/P(s)=1/10 Con tale scelta si ottiene ‘l’inseguimento perfetto del riferimento’ per il sistema nominale Analizziamo il comportamento del sistema di controllo a catena aperta in presenza di un disturbo sull’uscita (ad es. se la strada non è in pianura si riduce la velocità finale in modo proporzionale alla pendenza: - 1 V 50 10 10 50 10 10 non si ha più l’inseguimento perfetto Analizziamo l’effetto di una variazione parametrica rispetto al modello nominale: C(s)=9 1 V 50 9 45 10 non si ha più l’inseguimento perfetto Consideramo adesso il controllo a catena chiusa, in cui il sistema di controllo è istante per istante al corrente dello scostamento tra il riferimento e l’uscita del processo controllato supponiamo che la f.d.t. del trasduttore dell’uscita sia unitaria 10 H ( s ) G( s) 1 10 H ( s ) Per avere l’inseguimento perfetto deve essere G(s)=1, cioè H(s) ∞ L’inseguimento perfetto non è possibile • Scegliamo H(s)=k con k>>, ad esempio H(s)=1000 1000 * 10 V 50 Vrif 1 1000 * 10 La bontà dell’inseguimento è proporzionale al guadagno del controllore Analizziamo l’effetto del disturbo sull’uscita: 1000 * 10 1 V 50 10 1 1000 * 10 1 1000 * 10 L’effetto del disturbo è stato attenuato (reiezione dei disturbi sull’uscita) L’attenuazione del disturbo è proporzionale al guadagno del controllore Valutiamo l’effetto delle variazioni parametriche: V 50 9 * 1000 50 1 9 * 1000 L’effetto delle variazioni parametriche viene attenuato in modo proporzionale al guadagno del controllore Nel controllo a catena chiusa possono essere presenti rumori di misura: V 50 1000 * 10 10 * 1000 10 1 1000 * 10 1 1000 * 10 Per attenuare i disturbi di misura il guadagno del controllore deve essere basso!!!! Riassunto Per il controllo in retroazione: • L’inseguimento migliora al crescere di k • Si ha una buona attenuazione dei disturbi sull’uscita, che migliora al crescere di k • Si ha una buona attenuazione dell’effetto delle variazioni parametriche, che migliora al crescere di k • È possibile che intervengano rumori di misura, il cui effetto diminuisce al diminuire di k • Aumenta la complessità di progettazione del controllore • Aumentano i costi del sistema di controllo Schema completo di un sistema di controllo in retroazione Trasduttori: misurano le variabili e trasmettono la misura a distanza es: temperatura tensione Attuatori: convertono prodotte dal controllore nelle variabili manipolabili e le amplificano es: tensione coppia Trascuriamo la compensazione del disturbo Ogni blocco può rappresentare in generale un sistema dinamico nonlineare tempo variante Supponiamo che il sistema vari lentamente nel tempo e possa essere approssimato da un sistema tempoinvariante Consideriamo il funzionamento del sistema intorno ad un punto di equilibrio (punto di funzionamento nominale) e supponiamo che le variazioni delle grandezze siano piccole e che i disturbi siano additivi Con tali ipotesi ogni blocco è rappresentato da una f.d.t. (sistemi linearizzati) Usando l’algebra degli schemi a blocchi: Supponiamo che i due trasduttori siano uguali Schema di un sistema di controllo in retroazione per piccoli segnali: La f.d.t del processo include quella dell’attuatore La f.d.t. del controllore include quella del trasduttore (in genere = K) Esempio: controllo di posizione di un montacarichi Confronto e f.d.t del controllore Attuatore e processo Segnale di riferimento Sensore di posizione: potenziometro (variabile di riferimento) Uscita:posizione montacarichi Sensore di posizione: potenziometro (variabile di uscita) Lo scopo è quello di controllare un motore che ha il compito di sollevare o abbassare un carico, in modo da portarlo ad un’altezza fissata dall’esterno per mezzo di una levetta La posizione del carico viene individuata grazie alla presenza della 2° levetta Le posizioni delle due levette vengono trasdotte, per mezzo di due potenziometri, in due segnali di tensione Il sistema di controllo, facendo un confronto tra i due segnali, aziona il motore per sollevare o abbassare il carico fino a portarlo nella posizione in corrispondenza della quale si ha e1=e2 E e1 * r R E e2 * y R ρ=resistenza per unità di lunghezza M=f.d.t. del motore e del montacarichi Proprietà degli schemi di controllo Catena aperta (azione diretta, open loop control feedforward control) Catena chiusa (controllo in retroazione, closed loop control feedback control) W0 C ( S ) P( S ) C ( S ) P( S ) Wc 1 C ( S ) P( S ) H ( S ) Condizione di inseguimento Catena aperta: C ( S ) P( S ) 1 Non è realizzabile! Si approssima inserendo poli a dinamica molto veloce Catena chiusa: C ( S ) P ( S ) H ( S ) 1 H (S ) 1 Sensitività alle variazioni parametriche Definiamo ‘sensitività alle variazioni parametriche di una f.d.t., dipendente dal parametro α: SG G G G G • Supponiamo che la f.d.t. del processo da controllare dipenda da un parametro P ( s, ) vogliamo calcolare la sensitività del processo controllato per il controllo a catena aperta il controllo non ha effetto sulla sensitività, infatti: S W0 C (S ) P(S , ) C ( S ) P( S , ) S W0 C ( S ) P( S , ) C (S ) P(S , ) P( S , ) S P P( S , ) Per il processo controllato a catena chiusa: SWc (1 C ( S ) P( S ) H ( S )) C ( S ) P( S ) 1 C ( S ) P( S ) H ( S ) C ( S ) P( S ) C ( S ) P( S ) 1 C ( S ) P ( S ) H ( S ) C ( S ) P(S ) (1 C ( S ) P( S ) H ( S )) C ( S ) P( S )C ( S ) H ( S ) P(S ) (1 C ( S ) P( S ) H ( S )) 2 SWc P ( S ) C ( S ) C ( S ) P( S ) H ( S ) C ( S ) P( S ) H ( S ) (1 C ( S ) P( S ) H ( S )) 2 (1 C ( S ) P( S ) H ( S )) 2 2 C ( S ) P( S ) S P SWc 1 C ( S ) P( S ) H ( S ) La sensitività viene attenuata, si desidera anche in questo caso C (S ) P( S ) H (S ) 1 Consideriamo la presenza di disturbi: Y CP 1 CPH r d dm 1 CPH 1 CPH 1 CPH L’attenuazione dei disturbi sull’uscita è garantita da L’attenuazione dei rumori di misura è garantita da CPH 1 CPH 1 Definiamo funzione sensitività S(s) 1 S (S ) 1 CPH e funzione sensitività complementare CPH T (S ) 1 S (S ) 1 CPH Y ( s ) T ( S ) r ( S ) S ( S )d ( S ) T ( S )d m ( S ) 1) T ( S ) 1 2) S(S) 0 3) T(S) 0 - Buon inseguimen to - Attenuazio ne disturbo d - Attenuazio ne disturbo d m I disturbi sulla catena diretta e i rumori di misura agiscono in genere in bande differenti, si cerca quindi di garantire: Se le bande si sovrappongono si devono utilizzare schemi di controllo più complessi (controllo a 2 gdl) Controllo, supervisione ed automazione • Nei sistemi di controllo industriali è spesso presente un controllore di secondo livello che effettua operazioni di supervisione, con il compito di elaborare i dati raccolti sulla variabile di controllo e su quella controllata, aggiornare eventualmente il modello del processo, modificare il controllore (controllo adattativo) ed effettuare operazioni di diagnostica sul processo, sul controllore e sulla strumentazione, con il contributo dell’operatore e tramite opportune interfacce uomo-macchina poste nelle sale di controllo • Un sistema di supervisione si occupa in genere di un gruppo di controllori ed è a sua volta gestito da controllori di livello superiore • Nei sistemi di controllo multilivello in genere i livelli più elevati hanno anche la funzione di scegliere i riferimenti per i livelli inferiori e comprendono anche sistemi di controllo sequenziale che controllano la sequenza con cui vengono svolte determinate operazioni (controllori logici), si parla in tal caso di sistemi di automazione
Scaricare