DISPENSE
CORSO DI FONDAMENTI DI MECCANICA E BIOMECCANICA
Prof. Bruno Picasso
Sistemi di coordinate:
Z
P (x,y,z)
r
k
i
O
j
Y
X
Una terna destra ha gli assi disposti come le tre dita della mano destra, pollice secondo x, indice
secondo y, medio secondo z. Un osservatore disposto secondo uno degli assi, ad esempio Z, vede x
ruotare verso y in senso antiorario. Analoghe proprietà si ottengono per gli altri assi semplicemente
permutando i simboli degli assi stessi. Un punto P di coordinate x,y,z è rappresentato dal vettore
colonna :
P =
⎧x⎫
⎪ ⎪
⎨ y⎬
⎪z ⎪
⎩ ⎭
o anche dall’espressione equivalente x*i + y*j + z*k
dove i,j,k sono i versori (vettori unitari) degli assi X,Y,Z.
per rendere più agevoli le trasformazioni tra diversi sistemi di coordinate spesso si introduce una
quarta coordinata, impiegata in alcune trasformazioni come fattore di scala. Le cordinate di questo
tipo si chiamano coordinate omogenee.
⎧a x ⎫
⎪a ⎪
⎪ y⎪
P = ⎨ ⎬ ; le coordinate cartesiane di P si ottengono dividendo ax,ay,az per α
⎪a z ⎪
⎪α ⎪
⎩ ⎭
Ricordiamo che le coordinate x.y,z sono le lunghezze delle proiezioni del vettore r = OP sugli assi
coordinati, quindi in generale una matrice colonna rappresenterà un vettore nello spazio. Se si
conoscono le coordinate degli estremi A,B il vettore AB è rappresentato dalla matrice colonna :
⎧bx − a x ⎫
⎪
⎪
⎨b y − a y ⎬
⎪
⎪
⎩bz − a z ⎭
La differenza di due punti:
P-O = rop è un vettore con l’origine in O e la punta in P
⎧ xP ⎫
⎪ ⎪
Un vettore OP può essere rappresentato con i simboli OP, (P-O), rP, ⎨ yP ⎬ . In questo testo i vettori
⎪z ⎪
⎩ P⎭
r
verranno sempre indicati in grassetto, nella letteratura sono anche comuni i simboli r , r , r.
Nelle costruzioni grafiche e figure di questo testo l’informazione sulla direzione e verso del vettore
è data dal segmento che lo rappresenta, il nome del vettore verrà quindi scritto in caratteri normali.
Operazioni principali sui vettori.
Vettori liberi e applicati.
I vettori rappresentano in genere grandezze fisiche, come forze, velocità, accelerazioni etc. Le forze
sono in genere applicate su specifici punti di un corpo, per cui si parla di vettori applicati. Un
vettore applicato è definito dal modulo, direzione, verso e punto di applicazione, un vettore libero
soltanto da modulo direzione e verso. Si tenga presente che un vettore che rappresenta una forza
applicata ad un corpo non può essere traslato parallelamente a se stesso senza che cambi l’effetto
prodotto dalla forza stessa. Le grandezze cinematiche come spostamenti, velocità ed accelerazioni
sono in genere vettori liberi. Le operazioni su vettori, definite nel seguito, possono riferirsi a vettori
liberi e applicati.
Somma e sottrazione
Se i vettori sono concorrenti o comunque sono vettori liberi la somma di due vettori a e b ,
⎧a x ⎫ ⎧bx ⎫
⎪ ⎪ ⎪ ⎪
rappresentati dalle due matrici colonna ⎨a y ⎬ ⎨b y ⎬ si effettua come segue:
⎪ ⎪ ⎪ ⎪
⎩a z ⎭ ⎩bz ⎭
⎧a x ⎫ ⎧bx ⎫ ⎧a x + bx ⎫
⎪ ⎪ ⎪ ⎪ ⎪
⎪
⎨a y ⎬ + ⎨b y ⎬ = ⎨a y + b y ⎬
⎪ ⎪ ⎪ ⎪ ⎪
⎪
⎩a z ⎭ ⎩bz ⎭ ⎩a z + bz ⎭
sommando termine a termine le componenti. In
modo analogo si opera la differenza. Graficamente
a-b
a
(nel caso di problemi piani) i vettori si possono
a+b
sommare riportandoli a partire da un punto comune,
costruendo un parallelogramma e tracciando le due
b
diagonali. La diagonale che va dall’inizio comune
dei due vettori al vertice opposto del
parallelogramma rappresenta la somma, l’altra diagonale, diretta dalla punta di b alla punta di a,
rappresenta la differenza a-b. Si può anche dire che la risultante di uno o più vettori si ottiene
riportandoli uno di seguito all’all’altro parallelamente a se stessi. La risultante si ottiene
congiungendo l’inizio con la fine della spezzata cosi ottenuta.
Per i vettori applicati è consentita l’operazione di trasporto del vettore parallelamente a se stesso
per ottenere la risultante, ma questa dovrà poi essere applicata in un punto opportuno. Questo punto
si trova ricordando che il momento risultante del sistema dei vettori, cioè la somma dei momenti dei
singoli vettori rispetto ad un polo arbitrario, deve essere eguale al momento della risultante rispetto
allo stesso polo.
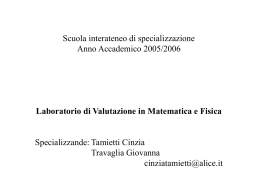
Esempio:
Il sistema di vettori F1,F2,F3 giace nel piano XY. Le componenti e i punti di applicazione sono:
⎧1 ⎫
⎧5⎫
⎪ ⎪
⎪ ⎪
F1 = ⎨0⎬ P1 = ⎨7⎬
⎪0⎪
⎪0⎪
⎩ ⎭
⎩ ⎭
⎧− 4 ⎫
⎧5 ⎫
⎪ ⎪
⎪ ⎪
F2 = ⎨− 3 ⎬ P2 = ⎨6⎬
⎪0 ⎪
⎪0⎪
⎩ ⎭
⎩ ⎭
⎧0 ⎫
⎧8 ⎫
⎪ ⎪
⎪ ⎪
F1 = ⎨− 6⎬ P3 = ⎨9 ⎬
⎪0 ⎪
⎪0⎪
⎩ ⎭
⎩ ⎭
⎧1 ⎫
⎪ ⎪
Si voglia calcolare il risultante e il momento risultante rispetto al punto K = ⎨1 ⎬ .
⎪0⎪
⎩ ⎭
Risposta:
La risultante è la somma dei tre vettori
⎧5⎫ ⎧− 4⎫ ⎧0 ⎫ ⎧1 ⎫
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪
R = ⎨0⎬ + ⎨− 3 ⎬ + ⎨− 6⎬ = ⎨− 9⎬
⎪0⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪0 ⎪
⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭
Il punto di applicazione della risultante si trova scrivendo l’espressione del momento risultante
rispetto a K.
P3
Y
P3
P1
F1
F
3
P2
R
R23
F2
K
F2
R
F1
X
⎧5⎫ ⎧1 − 1 ⎫ ⎧− 4⎫ ⎧1 − 5⎫ ⎧0 ⎫ ⎧1 − 8⎫ ⎧1 ⎫ ⎧1 − r x ⎫
⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪
F1 × P1 K + F2 × P2 K + F3 × P3 K = ⎨0⎬ × ⎨1 − 7⎬ + ⎨− 3 ⎬ × ⎨1 − 6⎬ + ⎨− 6⎬ × ⎨1 − 9⎬ = ⎨− 9⎬ × ⎨1 − r y ⎬
⎪
⎪0⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪0 ⎪ ⎪
⎭ ⎩ ⎭ ⎩0
⎭ ⎩ ⎭ ⎩
⎭ ⎩ ⎭ ⎩
⎩ ⎭ ⎩
⎭
Poichè la somma delle componenti x delle forze deve essere eguale alla componente x della
risultante e la stessa eguaglianza vale per la componente y, scriviamo due equazioni di momento per
le componenti x e y:
5 * (1 − 7) − 4(1 − 6) = 1 − r y
r y = 11
73(1 − 5) + 6(1 − 8) = +9(1 − r x ) r x = 7
la figura mostra a sinistra la costruzione grafica della risultante e a destra la risultante ottenuta
prolungando la linea d’azione delle forze.
Vettori paralleli
Se due o più vettori da sommare sono paralleli, la loro risultante sarà rappresentatata da un vettore
le cui componenti sono le somme delle componenti omologhe dei singoli vettori. Se si tratta di
vettori applicati, ad ad esempio forze, il punto di applicazione della risultante si può ottenere
ricordando che il momento risultante, cioè la somma dei momenti dei singoli vettori rispetto ad un
polo, è eguale al momento della risultante. Dato ad esempio il sistema di due forze a,b in figura:
Scegliendo un sistema di assi come quello in figura e
come polo dei momenti il punto O, la cui distanza da
y
A è incognita si ottiene :
A
O
x
B
b
a
⎧ 0 ⎫ ⎧ xO
⎪
⎪ ⎪
⎨− a ⎬ × ⎨0
⎪0 ⎪ ⎪0
⎩
⎭ ⎩
⎫
⎧ 0 ⎫ ⎧ xO − x B ⎫
⎪
⎪ ⎪
⎪
⎪
⎬ = 0
⎬ + ⎨− b ⎬ × ⎨0
⎪
⎪
⎪0 ⎪ ⎪0
⎩
⎭ ⎩
⎭
⎭
a
l’equazione vettoriale precedente si riduce a una
equazione scalare (le restanti due sono identità):
a ∗ xO + b ∗ ( xO − xB ) = 0
da cui :
b ∗ xB
xO =
a +b
Sistema di vettori qualunque:
P1
P2
F2
F1
O
Nel caso di un sistema di vettori qualunque la risultante può essere facilmente trovata in modulo
direzione e verso come somma dei vettori del sistema. Il punto di applicazione viene individuato
scrivendo che il momento risultante, ovvero la somma dei momenti dei singoli vettori rispetto ad un
qualunque punto, è eguale al momento della risultante.
∑F
i
× (O − Pi ) = R × (O − PR )
in cui R = ∑ Fi
Coppia :
Una coppia è un sistema di due vettori eguali, paralleli e di verso opposto. La sua risultante è nulla,
il suo momento rispetto a qualunque polo è il momento della coppia. Ricordiamo che il momento di
una coppia è un vettore la cui direzione è perpendicolare a quella del piano che contiene le due
forze della coppia, il modulo è F*b, prodotto del modulo delle forze per il braccio b, il verso, tale
che un osservatore diretto come il vettore momento vede la coppia ruotare in senso antiorario.
Prodotto.
F
b
F
Il prodotto vettoriale a x b di due vettori concorrenti è anch’esso
un vettore di modulo pari a ab*sin(α), essendo a l’angolo
formato dai due vettori, avente come direzione la retta
perpendicolare ai due vettori ed al piano che li contiene e verso
tale da costituire una terna destra con i due vettori a e b.
In termini di componenti il prodotto vettoriale a x b è dato da :
⎧a x ⎫ ⎧bx ⎫ ⎧a y ⋅ bz − a z ⋅ b y ⎫
a xb
⎪
⎪ ⎪ ⎪ ⎪ ⎪
a x b = ⎨a y ⎬ × ⎨b y ⎬ = ⎨a z ⋅ bx − a x ⋅ bz ⎬
⎪ ⎪ ⎪ ⎪ ⎪a ⋅ b − a ⋅ b ⎪
y
x ⎭
⎩a z ⎭ ⎩bz ⎭ ⎩ x y
b
α
a
Le componenti del vettore prodotto possono anche esprimersi come i minori rispetto a i,j,k della
⎡i
j k⎤
⎥
⎢
matrice: ⎢a x a y a z ⎥
⎢bx b y bz ⎥
⎦
⎣
Il prodotto vettoriale rappresenta l’area del parallelogramma costruito a partire dai due vettori. Il
prodotto vettoriale gode della proprietà distributiva ma non di quella commutativa. Si ha :
a × b = −b × a
Il prodotto misto di tre vettori è uno scalare il cui valore misura il volume del
parallelepipedo costruito sui vettori dati:
⎡c x
⎢
s = a × b o c = ⎢a x
⎢bx
⎣
c y cz ⎤
⎥
ay az⎥
b y b z ⎥⎦
Se il prodotto misto si annulla i vettori sono complanari.
Il doppio prodotto vettoriale è un vettore definito da :
(a × b) × c = (a o c)b − (b o c)a (ricordiamo che è diverso da a × (b × c) = (a o c)b − (a o b)c )
Momento di un vettore rispetto ad un punto (polo dei momenti)
M = F x PO
P
F
Il momento M è esso stesso un vettore diretto come la
normale al piano individuato da O e da F e modulo
F*PO*sin(a).
M
α
O
Prodotto scalare :
Il prodotto scalare di due vettori a b è dato dalla quantità:
c = a o b = a ∗ b ∗ cosα = ax*bx+ay*by+az*bz
cioè dal prodotto dei moduli dei due vettori per il coseno dell’angolo compreso. Il prodotto scalare
rappresenta il prodotto del modulo di uno di essi per la proiezione dell’altro su esso. Il prodotto
scalare gode della proprietà commutativa e distributiva.
Derivata di un vettore:
Si consideri prima la derivata di un versore, cioè di un vettore di modulo unitario e costante e di
direzione variabile. Si ha:
dr
r (t + dt) − r (t) r * dθ
= lim
=
μ = ω ×r
dt
dt
dt
La derivata di un vettore generico, variabile
anche in modulo si ottiene utilizzando la
relazione precedente:
ω
r(t+dt)
r(t)
dϑ
μ
λ
dr d (rλ )
=
= r&λ + ωr μ
dt
dt
Trasformazioni di rotazione.
Si presenta spesso il problema di esprimere le
coordinate di un punto o le componenti di un
vettore in un nuovo sistema di coordinate
avente la stessa origine del primo ma ruotato
rispetto ad esso. Per esprimere questa
trasformazione è necessario conoscere la
matrice dei coseni direttori, cioè la matrice dei
coseni degli angoli che gli assi del sistema
ruotato formano con quelli del sistema
originario:
dr
ν
Z
P (x,y,z)
rP
k
X
i
j
Y
Z
Z’
Y’
k
i
X
α11
k
i’
X’
α31
j’
j
Y
Nella figura sono rappresentati i tre
angoli α11,α21,α31 che l’asse X’ forma con
i tre assi del sistema fisso. Il sistema
completo dei 9 angoli, che gli assi del
sistema mobile formano con quelli del
sistema fisso, definisce completamente la
posizione angolare di quest’ultimo
rispetto al primo. Si ha poi
i ' = a 11i + a 21 j + a 31k
j' = a 12 i + a 22 j + a 32 k
k ' = a 13 i + a 23 j + a 33 k
α21
;
⎧ i' ⎫ ⎡ a 11
⎪ ⎪ ⎢
⎨ j' ⎬ = ⎢ a 12
⎪ k' ⎪ ⎢ a
⎩ ⎭ ⎣ 13
a 21
a 22
a 23
a 31 ⎤ ⎧ i ⎫
⎪ ⎪
a 32 ⎥⎥ ⎨ j ⎬
a 33 ⎥⎦ ⎪⎩ k ⎪⎭
Avendo posto a ij = cos α ij e αij l’angolo tra la direzione i del sistema fisso e quella j del sistema
mobile.
La matrice α è ortonormale, gode cioè della proprietà che la sua inversa coincide con la sua
trasposta.
Si ha allora :
P ' = [x'
⎧i' ⎫
⎪ ⎪
y' z']⎨ j' ⎬ = [x'
⎪k '⎪
⎩ ⎭
⎡ a 11
y' z']⎢⎢a 12
⎣⎢a 13
a 21
a 22
a 23
a 31 ⎤ ⎧ i ⎫
⎧i ⎫
⎪ ⎪
⎪ ⎪
⎥
a 32 ⎥ ⎨ j ⎬ = [x y z]⎨ j ⎬
⎪k ⎪
a 33 ⎥⎦ ⎪⎩k ⎪⎭
⎩ ⎭
E anche :
⎧ x ⎫ ⎡α 11 α 12 α 13 ⎤ ⎧ x' ⎫
⎪ ⎪ ⎢
⎥⎪ ⎪
⎨ y⎬ = ⎢α 21 α 22 α 23 ⎥ ⎨ y'⎬
⎪ z ⎪ ⎢α
⎪ ⎪
⎩ ⎭ ⎣ 31 α 32 α 33 ⎥⎦ ⎩ z' ⎭
L’ultima relazione ci dice che per passare dalle
coordinate di un punto dello spazio, espresso rispetto
ad un sistema mobile, a quelle rispetto a un sistema
fisso, è sufficiente premoltiplicare il vettore delle
coordinate rispetto al sistema mobile per la matrice dei
coseni direttori del sistema mobile rispetto al sistema
fisso. Ricordiamo che una generica colonna della
matrice dei coseni direttori contiene i coseni degli
angoli che l’asse mobile, corrispondente all’indice
della colonna, forma con gli assi fissi. Ad esempio la
seconda colonna contiene i coseni degli angoli che
l’asse y’ forma con gli assi x,y,z.
z’
z
α
y’
α
x=x’
y
Trasformazioni elementari:
Si cerchi la matrice che esprime una rotazione intorno all’asse x di un angolo α. Osservando la
figura e ricordando il significato delle colonne della matrice dei coseni si ottiene.
Ax,α
⎡1 0
= ⎢⎢0 cα
⎢⎣0 sα
0 ⎤
− sα ⎥⎥
cα ⎥⎦
Analogamente per rotazioni intorno a y dell’angolo β e a z dell’angolo γ.
Ay, β
⎡ cβ
= ⎢⎢ 0
⎢⎣− sβ
0 sβ ⎤
1 0 ⎥⎥
0 cβ ⎥⎦
Az,γ
⎡ cy − sγ
= ⎢⎢ sγ cγ
⎢⎣ 0
0
0⎤
0⎥⎥
1⎥⎦
Una serie di rotazioni intorno ad assi fissi e mobili è rappresentata da una matrice, che si ottiene
dalla moltiplicazione delle singole matrici di rotazione, con l’avvertenza che bisogna
premoltiplicare se la rotazione
avviene intorno ad assi fissi,
Z’
postmoltiplicare se la rotazione
avviene intorno ad assi mobili.
Z
Trasformazioni di traslazione e
rotazione.
O’
Quando
un
sistema
di
coordinate viene traslato oltre
k
che ruotato rispetto ad un
Y’
O
j
sistema fisso, è opportuno
i
Y
X’
ricorrere
alle
coordinate
X’
omogenee, che comportano che X
la matrice di trasformazione 4*4
contenga nelle prime tre righe l’usuale matrice dei coseni direttori, nell’ultima colonna le coordinate
dell’origine del sistema mobile rispetto al sistema fisso.
⎡ a 11
⎢a
T12 = ⎢ 21
⎢ a 31
⎢
⎣0
a12
a 22
a 32
a13
a 23
a 33
0
0
xo ' ⎤
y0 ' ⎥⎥
zo ' ⎥
⎥
1⎦
Esempio:
Due sistemi di coordinate sono inizialmente coincidenti, poi uno dei due viene traslato secondo il
⎧1.5 ⎫
⎪
⎪
vettore ⎨0
⎬ . Successivamente, il sistema mobile ruota rispetto all’asse x fisso, dell’angolo α,
⎪− 0.5⎪
⎩
⎭
quindi intorno all’asse y’ ruotato dell’angolo β. Si trovi la matrice di trasformazione:
⎡1
⎢0
T12 = ⎢
⎢a 31
⎢
⎣0
0
0
cα − sα
sα cα
0
0
0⎤ ⎡1
0⎥⎥ ⎢⎢0
0 ⎥ ⎢0
⎥⎢
1 ⎦ ⎣0
0
1
0
0
0
0
1
0
xo ' ⎤ ⎡ cβ
y0 ' ⎥⎥ ⎢⎢ 0
z o ' ⎥ ⎢ − sβ
⎥⎢
1 ⎦⎣ 0
0 sβ
1 0
0 cβ
0 0
0⎤
0⎥⎥
0⎥
⎥
1⎦
Angoli di Eulero
Dato un sistema mobile e uno fisso con origini coincidenti, la posizione del sistema mobile rispetto
a quello fisso è definita da tre rotazioni rispetto agli assi fissi, una intorno all’asse X (roll), una
intorno all’asse Y (pitch), una intorno all’asse Z (yaw).
La matrice di rotazione potrà essere facilmente ottenuta
ricordando che per rotazioni intorno ad assi fissi X,dell’angolo
Z
α,Y,di β, Z di γ si ha :
X
Y
RX,α,Y,β,X,γ
⎡cγ
= ⎢⎢ sγ
⎢⎣ 0
− sγ
cγ
0
0⎤ ⎡ cβ
0⎥⎥ ⎢⎢ 0
1⎥⎦ ⎢⎣− sβ
0 sβ ⎤ ⎡1 0
1 0 ⎥⎥ ⎢⎢0 cα
0 cβ ⎥⎦ ⎢⎣0 sα
0 ⎤
− sα ⎥⎥
cα ⎥⎦
CINEMATICA DEL PUNTO
Il punto materiale è un’astrazione matematica che rappresenta
un corpo senza estensione, ma dotato di massa. Un punto
materiale può subire traslazioni ma non rotazioni non essendo queste ultime definibili per un punto.
Z
P (x,y,z)
r
k
j
i
X
Y
La posizione di un punto materiale nello spazio è completamente definita dal vettore r, o dalla
matrice colonna che rappresenta le sue componenti, che coincidono con le coordinate Cartesiane del
punto P.
OP = r = r τ = xi + yj + zk
Prima di scrivere le espressioni della velocità e dell’accelerazione del punto P, occorre ricordare
l’espressione della derivata di un versore, cioè di un vettore costante in modulo ma non in
direzione:
dτ
= ω × τ essendo ω la velocità angolare del vettore τ nell’istante considerato.
dt
La derivata di un vettore r, diretto come il versore τ e variabile sia in modulo che in direzione vale
invece:
dr
dτ
= r&τ + r ∗
= r&τ + ω × r
dt
dt
La velocità e l’accelerazione di P sono allora:
v
p
= lim
aP =
Δt→ 0
r (t + Δ t ) − r (t )
dr
dτ
=
= r&τ + r ∗
= r& τ + r ω × τ = r&τ + ω × r τ = r&τ + ω × r
Δt
dt
dt
d 2r
= &r&τ + ω& × r + ω × (ω × r ) + 2ω × r&
dt 2
E’ facile individuare nell’espressione dell’accelerazione quattro termini, il primo e il quarto
(accelerazione di Coriolis) dovuti alla variazione del modulo di r, gli altri due alla variazione della
direzione di r. Un’altra espressione della velocità e dell’accelerazione del punto P può essere
ottenuta attraverso le sue coordinate:
d
( xi + yj + zk ) = ( x&i + y& j + z&k )
dt
d2
a P = 2 ( xi + yj + zk ) = ( &x&i + &y&j + &z&k )
dt
vP =
Alcuni tipi di moto di un punto materiale:
Moto rettilineo:
La trattazione di questo moto può essere
scalare, in quanto la posizione del punto
su una traiettoria rettilinea è definita da
un solo parametro scalare, ad esempio
l’ascissa x, essendo l’asse x diretto come
la traiettoria del moto:
P
O
x
Per la velocità ed accelerazione di P abbiamo allora le semplici espressioni:
X
OP = x
vP = x&
a P = &x&P
Esempi di moto rettilineo sono:
Il moto rettilineo uniforme nel quale l’accelerazione è nulla e la velocità costante.
Il moto rettilineo uniformemente accelerato nel quale la velocità varia linearmente col tempo
mentre l’accelerazione è costante. Per questo tipo di moto si ha:
a P = a = cos t.
t
vP = ∫ a ∗ dt = a ∗ t + v0
0
t
1
2
0
Nelle espressioni precedenti x0 e v0 rappresentano rispettivamente lo spazio percorso per t=0 e la
velocità iniziale del punto materiale.
Sono anche possibili moti rettilinei in cui l’accelerazione non è costante ma varia in funzione del
tempo, della velocità o dello spazio percorso.
xP = ∫ vP ∗ dt = a ∗ t 2 + v0 ∗ t + x0
Moto circolare.
Il moto circolare può essere studiato facendo ricorso a due sistemi di riferimento, quello fisso x,y,z
(se supponiamo che la traiettoria sia contenuta nel piano x-y la coordinata z è superflua), e quello
mobile ξ,η,ζ
con versori λ,μ,ν che
accompagna il punto materiale durante il suo
Y
movimento, con λ orientato secondo il raggio
η
della traiettoria e dal centro verso la perferia,
ξ
μ tangente alla traiettoria e orientato in modo
μ
da percorrere la circonferenza con senso di
P λ
rotazione antiorario, ν perpendicolare al piano
y
r
ν
del moto e orientato in modo da formare una
j
X
terna destra con i primi due, cioè uscente verso
i
x
k
l’osservatore.
ω
Velocità ed accelerazione del punto P potranno
esprimersi ancora una volta usando le
coordinate fisse o quelle mobili. Rispetto al
sistema fisso x-y abbiamo:
x = r cos θ y = r sin θ
dθ
= −ωr sin θ
dt
dθ
y& = r cos θ ∗
= ωr cos θ
dt
&x& = −ω& r sin θ − ω 2 r cos ϑ
x& = −r sin θ ∗
&y& = ω& r cos θ − ω 2 r sin θ
Vettorialmente la velocità di P è espressa dalla relazione:
v P = x&i + y& j
Rispetto al sistema mobile si ha invece:
vP =
dr dr
dλ
=
λ = r&λ + r
= r ων × λ = ω r μ
dt
dt dt
a P = ω& r μ + ω r ω × μ = ω& r μ − ω 2 r λ
L’accelerazione di P è la somma di due componenti, la prima tangenziale, la seconda centripeta.
Quest’ultima è presente anche quando la velocità angolare del punto è costante.
Ricordando che:
dθ
= −ωr sin θ
dt
dθ
y& = r cos θ ∗
= ωr cos θ
dt
x& = −r sin θ ∗
e
⎧ x& ⎫ ⎧− ω r sin θ ⎫
v P = x& i + y& j = ⎨ ⎬ = ⎨
⎬
⎩ y& ⎭ ⎩ω r cos ϑ ⎭
⎧⎪− ω& r sin θ − ω 2 r cos ϑ ⎫⎪
a P = &x& i + &y& j = ⎨
⎬
⎪⎩ω& r cos θ + ω 2 r sin θ ⎪⎭
Si possono anche ottenere i valori precedenti delle componenti di velocità ed accelerazione rispetto
ad assi fissi, partendo da quelli rispetto ad assi mobili e utilizzando la matrice di rotazione tra i due
sistemi:
⎡cθ − sϑ 0⎤
⎢
X ,Y, Z
cθ 0⎥⎥
ς ,η ,ζ R = ⎢ sϑ
⎢⎣0
0 1 ⎥⎦
v
XYZ
P
⎡cθ − sϑ 0⎤ ⎧0 ⎫ ⎧− ω r sin θ ⎫
⎪ ⎪ ⎪
⎪
= ⎢⎢ sϑ cθ 0⎥⎥ ⎨ω r ⎬ = ⎨ω r cos ϑ ⎬
⎪
⎢⎣0
0 1⎥⎦ ⎪⎩0 ⎪⎭ ⎪⎩0
⎭
2
2
⎡cθ − sϑ 0⎤ ⎧− ω r ⎫ ⎧− ω& rs θ − ω r cϑ ⎫
⎪
⎪
⎪ ⎪
a PXYZ = ⎢⎢ sϑ cθ 0⎥⎥ ⎨ω& r ⎬ = ⎨ω& rc θ + ω 2 rs θ ⎬
⎪ ⎪0
⎪
⎢⎣0
0 1 ⎥⎦ ⎪⎩0
⎭ ⎩
⎭
Moti piani con traiettoria curva.
A questa categoria appartengono i moti balistici di corpi, lanciati da terra con una velocità iniziale,
che percorrono traiettorie giacenti in un piano verticale. Consideriamo ad esempio un corpo
balistico lanciato da terra con velocità v0. Se studiamo il moto considerando separatamente la
componente x e la componente y delle velocità, si ha:
vx = v0 cosθ ; v y = v0 sin θ − gt
ax = 0
a y = −g
1
2
x = vxt = v0 cosθ * t
t1 / 2
v sin θ
= 0
g
y = v0 sin θ * t − gt 2
v0 sin θ 1 v02 sin 2 θ 1 v02 sin 2 θ
− g
=
h = v0 sin θ *
2
2
g
g
g2
derivando l’espressione di h rispetto a θ
è facile vedere che, l’angolo che rende
Y
massima la gittata in assenza della
resistenza dell’aria, è uguale a 45°.
Altrettanto facile è, eliminando il
tempo dalle due espressioni dello
spazio percorso secondo x e y, vedere
v0
che la traiettoria ha una forma
h
parabolica. Dalle equazioni scritte si
θ
X
può dedurre che la componente vy si
annulla quando il corpo raggiunge la
massima quota. Da questa condizione si può calcolare il tempo t/2 necessario a percorrere metà
della traiettoria, che è simmetrica. Sostituendo questo tempo nell’espressione di x si ottiene
l’ascissa della posizione di massima altezza che, moltiplicata per due da la distanza a cui il corpo
toccherà di nuovo terra. Con relazioni analoghe si può trattare qualunque problema balistico
elementare, con qualunque condizione iniziale (ad esempio un corpo balistico può essere lanciato da
una certa quota invece che dal suolo. Non cambiano comunque le ipotesi di base, che si trascuri la
resistenza dell’aria e non siano presenti altri effetti, come spinta di razzi etc. Se si dovesse tener
conto di tutte i fattori che influenzano il volo del corpo, resistenza dell’aria, effetti giroscopici,
variazione della densità dell’aria con la quota etc. la soluzione delle equazioni del moto si potrebbe
raggiungere soltanto con un integrazione numerica.
Moto generale di un punto materiale secondo una traiettoria curva:
La traiettoria può essere una curva
parametrica, data analiticamente
mediante le tre equazioni che
seguono:
s
Z
Y
P(t
Δr
)
ν
X
μ
P(t+dt)
λ
x = f1(p)
y = f2(p)
z = f3(p)
Un caso elementare potrebbe ad
esempio essere quello di una traiettoria rappresentata da una retta nello spazio le cui equazioni
parametriche sono:
x = k1 p
y = k2 p
z = k3 p
Sulla curva è definita una coordinata curvilinea s, che misura lo spazio percorso dal punto nella sua
evoluzione. Considerando la posizione del punto in due istanti successivi di percorrenza della
traiettoria si ha :
Δr =
P (t + Δt ) − P (t )
Δt
v P = lim
Δt →0
Δr dr
=
Δt dt
La direzione del vettore dr al tendere di Δt a zero tende a quella della tangente alla traiettoria nel
punto P , quella cioè del versore λ , il modulo è dato dall’espressione infinitesima del rapporto
spazio su tempo
vP =
ds
, si ha quindi:
dt
ds
λ
dt
L’accelerazione del punto P si ottiene derivando l’espressione precedente:
ds
( )2
dv P d 2 s
ds
d 2s
ds
d 2s
= 2 λ + ω × λ = 2 λ + ων × λ = 2 λ + dt μ
aP =
dt
dt
dt
R
dt
dt
dt
dove i versori del sistema mobile sono disposti μ secondo la direzione della congiungente il punto
con il centro di curvatura della traiettoria, λ secondo la tangente alla traiettoria nel punto, ν in modo
tale da formare una terna destra con i primi due versori. Operando in questo modo, il versore ν avrà
la direzione del raggio che congiunge la posizione del punto col centro di curvatura della traiettoria.
Ancora una volta, se si conosce la matrice dei coseni direttori della terna mobile rispetto alla terna
fissa, sarà possibile ottenere le componenti di accelerazione rispetto al sistema fisso con la :
{
} [
aP =
XYZ
XYZ
RP
]{
ςηζ
aP
}
Una formula del tutto analoga vale per la velocità.
Un semplice esempio:
R=10
Un auto percorre a velocità v una strada che forma un
dosso con raggio di curvatura pari a 10 m. Quale è il
valore della velocità per la quale la vettura perde
completamente aderenza col terreno ?R.
aP =
v2
R
μ alla sommità del dosso se a P = gμ la forza
centrifuga –maP = -mgμ sarà eguale alla forza peso del veicolo che tenderà quindi a perdere
aderenza col terreno.
In modulo v =
g R =35,65 km/h. Nella situazione rappresentata in figura si dovrà calcolare la
componente verticale della forza centrifuga e confrontarla con il peso del veicolo.
Moto di un corpo rigido.
La posizione di un corpo rigido nello spazio è
definita da 6 parametri. Se, ad esempio, al
corpo è solidale un sistema mobile di
coordinate, i 6 parametri possono essere le
coordinate dell’origine e tre angoli (ad esempio
gli angoli di Eulero), che definiscono la
posizione angolare del sistema mobile rispetto
al sistema fisso.
Z
B
rB
Per un corpo rigido si ha
A
rA
k
j
r B = r A + r AB
i
dr A dr AB
+
= v A + ω × r AB
dt
dt
dv
dv
a B = A + AB = a A + ω × (ω × r AB ) + ω& × r AB
dt
dt
vB =
Y
X
La relazione precedente ci indica che la velocità e l’accelerazione di B si ottengono sommando alla
velocità e all’accelerazione di A le componenti di velocità ed accelerazione nel moto relativo (di
rotazione) di B rispetto ad A. Ricordiamo che la distanza rAB è costante in quanto rappresenta la
distanza tra i punti di un corpo rigido.
Moto relativo.
E’ frequente il caso in cui si voglia determinare velocità ed accelerazione di un corpo rigido rispetto
ad un sistema fisso di assi quando si conoscano questi parametri rispetto ad un sistema mobile. In
questo caso il corpo è mobile sia rispetto al primo che al secondo sistema.
Z
Z
A
r’A
i
X
k
B
O
rO’
O
r’AB
Y
j
X
Y
Si tenga presente, nel calcolo della
velocità e dell’accelerazione del corpo,
che questo ruota con velocità angolare
ω intorno al sistema mobile, mentre il
sistema mobile ruota a sua volta con
velocità angolare Ω rispetto al sistema
fisso. Si ha allora:
r A = r O' + r ' A
; r B = r O ' + r ' A +r ' AB
v A = v O ' + Ω × r ' A + v rA
v B = v O ' + Ω × r ' A + v rA + (Ω + ω ) × r AB
prima di ricavare le espressioni delle accelerazioni si tenga presente che :
d (ω + Ω ) &
= Ω + ω& + Ω × ω
dt
si ha allora:
a A = a O ' + Ω& × r ' A + Ω × ( Ω × r ' A ) + α rA + 2 Ω × v rA
& × r' +Ω × (Ω × r ' ) + a + 2Ω × v + (ω + Ω) × ((ω + Ω) × r ) + d (ω + Ω) × r =
a B = a A + a rBA = a O' + Ω
A
A
rA
rA
AB
AB
[
]
& × r ' + Ω × (Ω × r ' ) + [a + ω& × r + ω × (ω × r )] + [2Ω × v ]
= a O' + Ω
B
B
rA
AB
AB
rB
dt
Il primo termine fra parentesi quadre rappresenta l’accelerazione di trascinamento, il secondo quella
relativa, il terzo l’accelerazione di Coriolis.
Moti piani.
Moto di rotolamento puro.
V
P
V
O
C
teorema di Rivals ai punti C ed O del disco si ha:
Il punto di contatto tra il disco e la guida si
comporta, per un intervallo di tempo
infinitesimo, come se il disco ruotasse intorno
ad esso. Il punto, in corrispondenza del quale
la velocità è nulla, prende il nome di centro
della rotazione istantanea. Facciamo osservare
però che l’accelerazione in C è diversa da zero.
Esiste comunque un punto del disco nel quale
l’accelerazione è nulla. Il punto prende il nome
di polo delle accelerazioni. Applicando il
v O = v C + ω × CO = ω × CO
Partendo dal modulo della velocità del centro del disco è possibile ricavare il modulo della velocita’
angolare ω:
ω = vo/r
La velocità di un qualunque punto del disco è:
v P = ω × CP
da quanto precede si può dedurre che la velocità di un qualunque punto del disco è diretta
normalmente alla congiungente il centro di istantanea rotazione col punto. Se quindi, in un corpo, si
conoscono in modulo direzione e verso le velocità di due punti, è possibile determinare facilmente
la posizione del centro di istantanea rotazione.
Le accelerazioni dei punti del disco possono essere ricavate impiegando il teorema di Rivals. Nel
caso in cui siano conosciute velocità e accelerazione del punto O si ha:
v P = v O + ω × OP
a P = a o + ω& × OP + ω × (ω × OP )
La velocità del centro istantaneo C risulta:
a C = a o + ω& × O C + ω × (ω × O C )
nel caso in cui il centro O del disco abbia velocità uniforme, l’accelerazione di C è rappresentata dal
vettore ω × ω × OC ,diretto come OC ,nel verso da C verso O.
Moto di rotolamento con strisciamento.
Nel caso in cui si abbia strisciamento
sulla guida, il punto di contatto non è
più centro di istantanea rotazione.
Se si conoscono la velocità del punto di
contatto e quella del punto O, sarà
facile trovare la posizione del centro
istantaneo. Ricavando la velocità
angolare ω dalla:
V
O
K
h
V
v O = v K + ω × KO
C
in cui la velocità angolare è l’unica incognita, si può facilmente trovare la distanza lungo la
verticale di C dal punto di contatto, con la relazione:
v K = vC + ω × CK
e ricordando che vC è nullo.
Si tenga presente che il verso
della velocità vK può essere
opposto a quello della
velocità del centro del disco,
come capita ad esempio in
una ruota motrice che slitta
sul terreno, per un eccesso
della coppia applicata alla
ruota.
Il
centro
della
rotazione istantanea può
anche essere trovato con la
semplice costruzione grafica
indicata in figura.
vA
A
C
B
vB
Moto piano generico.
Se le velocità di tutti i punti di un corpo sono parallele ad un piano, la sezione del corpo con il
piano del moto si muove restando su questo. Nel moto piano è sufficiente conoscere le velocità di
due punti generici per ottenere la posizione del centro di istantanea rotazione, e quindi le velocità di
tutti gli altri punti. Il processo può essere grafico o analitico. Per via grafica si tracciano le normali
alla direzione delle velocità in due punti in cui questa è conosciuta. L’intersezione delle normali
tracciate rappresenta la posizione del centro di istantanea rotazione. Per via analitica si può scrivere:
v C = v A + ω × AC = 0
v C = v B + ω × BC = 0
Le due relazioni vettoriali precedenti
corrispondono a quattro relazioni scalari
(due delle equazioni, quelle relative alle
componenti sull’asse z sono delle identità)
con tre incognite, le due coordinate del
centro istantaneo e la componente sull’asse
Z della velocità angolare ω. In effetti, nel
moto piano, il vettore velocità angolare del
corpo è sempre perpendicolare al piano del
moto.
Y
B
C
vB
A
Un esempio.
vA
X
L’asta AB può muoversi con gli estremi vincolati a scorrere sulle guide, orientate rispettivamente
come gli assi X ed Y. Siano date le velocità degli estremi A e B dell’asta. In modo grafico la
posizione del centro istantaneo per la configurazione del sistema rappresentata in figura, si ottiene
tracciando le normali alle velocità dei punti A e B a partire dai punti stessi. Analiticamente si
applicheranno le relazioni viste in precedenza:
⎧ xC − xA ⎫
⎧vA ⎫
⎧0⎫ ⎪ ⎪ ⎧0 ⎫ ⎪
⎪
⎪
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎨0⎬ = ⎨0 ⎬ + ⎨0 ⎬ × ⎨ yC − 0 ⎬
⎪
⎪0⎪ ⎪0 ⎪ ⎪ω ⎪ ⎪
⎩ ⎭ ⎪ ⎪ ⎩ ⎭ ⎪0
⎪⎭
⎩
⎩ ⎭
;
⎧0 ⎫
⎧0⎫ ⎪ ⎪ ⎧0 ⎫ ⎧ xC − 0 ⎫
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎪
⎨0⎬ = ⎨vB ⎬ + ⎨0 ⎬ × ⎨ yC − yB ⎬
⎪0⎪ ⎪0 ⎪ ⎪ω ⎪ ⎪0
⎪
⎩ ⎭ ⎪ ⎪ ⎩ ⎭ ⎩
⎭
⎩ ⎭
Le due relazioni precedenti danno in conclusione:
vA − ω yC = 0
0 = xC − xA
0 = − ω ( yC − yB )
0 = vB + ω xC
da cui si ricava
xC = xA
yC = yB
ω=
vA
v
=− B
yB
xC
Si noti che le due relazioni che conducono al
valore di ω non sono in contraddizione, in
quanto il modulo della velocità di vB è
negativo. Con la scelta degli assi fatta, la
velocità angolare ω è antioraria, cioè positiva.
Il procedimento svolto è
assolutamente
generale per il moto piano.
Sistemi articolati.
C
θ2
B
A
θ1
C
Molti sistemi non risultano composti da un unico corpo rigido, ma da più corpi connessi attraverso
collegamenti, che chiameremo giunti. La configurazione di un sistema è descritta da una serie di
parametri indipendenti (possono essere ad esempio un certo numero di coordinate Cartesiane) che
ne definiscono completamente la posizione. Se il sistema è costituito da un certo numero di corpi
liberi, cioè non mutuamente vincolati, il numero di gradi di libertà del sistema è semplicemente pari
al numero dei corpi per il numero di gradi di libertà di un singolo corpo, tre per il moto piano, 6 per
il moto nello spazio a tre dimensioni. Se due corpi sono collegati da un giunto che annulla un certo
numero di movimenti elementari nel moto relativo dei due corpi, il numero di gradi di libertà del
sistema completo risulta pari a quello originario, meno il numero di movimenti elementari eliminati
dai vincoli. Se un giunto collega più di due corpi il numero di gradi di libertà che esso sottrae si
ottiene, considerando tutte le possibili coppie di elementi che concorrono in quel giunto, meno una.
Se ad esempio un giunto sferico collega tre elementi il numero di gradi di libertà che esso cancella
risulta pari a 6. Il sistema complessivo ne mantiene 12.
Prima di procedere allo studio di sistemi i cui componenti siano tutti soggetti ad un moto piano,
introduciamo la descrizione di alcuni tipi di giunti, con riferimento prima al moto piano e poi al
moto generale nello spazio.
Giunto rotoidale.
Il giunto rotoidale permette la rotazione relativa degli organi che
collega, togliendo due gradi di libertà al moto relativo dei due corpi.
In altre parole, i corpi collegati dal giunto conservano soltanto un
grado di libertà nel moto relativo, quello della rotazione. Se, prima
di essere collegati, i corpi avevano ciascuno tre gradi di libertà,
quindi complessivamente sei, dopo la rotazione saranno ancora possibili le due traslazioni e la
rotazione del complesso dei due corpi collegati, più la rotazione relativa. I parametri che descrivono
la posizione del sistema nel piano potrebbero essere (ma non sono gli unici possibili) le coordinate
x,y del punto A, l’angolo formato da AB con l’orizzontale e l’angolo formato da BC con AB.
Incastro.
L’incastro unisce due corpi, sopprimendo qualunque possibilità di moto
relativo. Al sistema di due corpi cosi formato restano tre gradi di libertà,
due spostamenti e una rotazione. L’incastro cancella quindi tre gradi di
libertà.
Appoggio semplice.
L’appoggio semplice permette ai due corpi di conservare un
movimento di rotazione relativa ed uno di traslazione.
Cancella quindi soltanto un grado di libertà dei sei
complessivi che i due corpi possedevano prima di essere
collegati.
Giunto prismatico
Il giunto prismatico sopprime due gradi di libertà nel moto piano, in
quanto consente soltanto lo scorrimento relativo dei due corpi che esso
collega impedendo rotazione e l’altro scorrimento.
Giunti spaziali.
Per quanto i sistemi articolati in tre dimensioni non vengano trattati in questa sede, si ritiene utile
menzionare i principali tipi di giunti spaziali, tenendo presente che le loro proprietà possono essere
desunte per estensione da quelle dei corrispondenti giunti piani.Considerato che un corpo rigido,
nello spazio, ha sei gradi di liberta, tre spostamenti secondo gli assi coordinati e tre rotazioni intorno
a questi, possiamo indicare i principali tipi di giunti spaziali:
Giunto sferico.
Il giunto sferico toglie ai corpi che collega la possibilità di traslazioni relative, lasciando i tre gradi
di libertà di rotazione. Si pensi all’esempio classico dell’articolazione testa del femore-acetabolo,
che realizza la possibilità per il femore di ruotare intorno al centro cinematico dell’articolazione.
Giunto prismatico.
Se i due corpi collegati dal giunto non possono compiere rotazioni relative intorno all’asse
dell’accoppiamento, il giunto cancella cinque gradi di libertà, tre rotazioni e due traslazioni,
permettendo soltanto una traslazione nel moto relativo. Il numero di gradi di libertà conservato dal
sistema dei due corpi collegati dal giunto, è pari a sette dei dodici originari.
Giunto cilindrico.
Il giunto cilindrico conserva nel moto relativo soltanto
due gradi di libertà, una rotazione intorno all’asse del
cilindro e uno spostamento secondo l’asse,
cancellando quindi 4 gradi di libertà. Il sistema
complessivo dei due corpi mantiene quindi 8 gradi di
libertà.
Appoggio piano.
E’ frequente il caso che un corpo sia vincolato con un
suo punto a scorrere su un piano. In questo caso nel
moto relativo i due corpi conservano tre gradi di
libertà, due spostamenti e una rotazione. Il complesso
dei due corpi collegati ha quindi 9 gradi di libertà.
Incastro spaziale.
Blocca completamente il movimento relativo dei due corpi che collega. Il sistema dei due corpi
mantiene 6 gradi di liberta complessivi.
Numero di gradi di libertà di un sistema in moto piano:
z = 3*n –3*i – 2*c – a
nella relazione precedente si ha:
n = numero dei corpi che compongono il sistema
i = numero degli incastri
c = numero delle cerniere (giunti rotoidali)
a = numero degli appoggi semplici
Numero dei gradi di libertà di un sistema spaziale:
z = 6*n – 6*i – 3*c – 1*ap
con significato analogo dei simboli, tenendo presente che in questo caso vanno considerati i giunti
spaziali e non quelli piani.
Un esempio importante di sistemi articolati spaziali è quello degli arti superiori e inferiori del corpo
umano. Si tratta in genere di giunti rotoidali ( l’articolazione dell’anca è, come abbiamo accennnato
un vincolo sferico, in quanto la testa del femore, di forma sferica, si accoppia alla cavità
dell’acetabolo, anch’essa della stessa forma. Ambedue gli elementi sferici sono rivestiti da un
materiale elastico e relativamente deformabile, la cartilagine, che ha lo scopo di attenuare le punte
di sollecitazione dovute al trasferimento dei carichi dall’arto al tronco, attraverso il bacino. Se le
superfici della testa del femore e dell’acetabolo a contatto strisciassero l’una sull’altra senza alcun
lubrificante, si avrebbe una rapida usura delle superfici stesse, con conseguente danno funzionale
nell’articolazione. In effetti, le superfici sono lubrificate dal liquido sinoviale che abbassa
fortemente il coefficiente d’attrito tra gli elementi a contatto e minimizza il calore prodotto per
attrito durante il funzionamento dell’articolazione.
Studi recenti hanno dimostrato che lo strato di cartilagine che riveste la superficie ossea dura della
testa del femore presenta una struttura fibrosa con fibre di collagene disposte radialmente a partire
dall’osso per assumere un’andamento tangenziale alla superfice del esterna. In questo modo il
“cuscinetto” di cartilagine presenta la capacita di sostenere elevati carichi che si trasmettono alle
fibre radiali inglobate nel cuscinetto.
ω22*AB
aA
Analisi di un sistema articolato.
B
C
ω32*O1B
ω 1*OA
:
Y
B
ω2*AB
ω1*OA
A
aA
ω& 2 AB
vA
ω&1OA
2
ω& 3 ∗ O1 B
vB
ω& 1
O
ω1
X
aB
O1
Sia completamente definita la geometria del sistema, in questo caso un quadrilatero articolato con
un solo grado di libertà. Siano date la velocità angolare e l’accelerazione angolare della prima asta.
Partendo dal punto fisso O e analizzando la prima asta si ha:
v A = ω 1 × OA
a A = ω& 1 × OA + ω 1 × ω 1 × OA
Il calcolo analitico delle componenti della velocità e dell’accelerazione di A è elementare,
ricordando che i vettori velocità angolare e accelerazione angolare sono diretti come l’asse z ed
hanno quindi una sola componente, e che le componenti del vettore OA sono ricavabili dalla
geometria nota del meccanismo. E’ interessante una procedura di calcolo della velocità e
dell’accelerazione più rapida e diretta, usando le seguenti proprietà.
La velocità di A è un vettore normale ad OA, di valore ω1*OA. Nel caso si vogliano usare
costruzioni grafiche, è necessario riportare i vettori sul disegno in scala opportuna. Possono
comunque usarsi scale diverse per le lunghezze, per le velocità e per le accelerazioni.
L’accelerazione di A è la somma di due vettori il primo di modulo ω& 1 ∗ OA, perpendicolare
ad OA, con verso derivato dalla regola delle tre dita della mano destra (pollice secondo ω& 1 ,
indice secondo OA, medio secondo la componente cercata dell’accelerazione), il secondo
diretto come OA, da A verso O e modulo ω12 ∗ OA. Le componenti di velocità ed
accelerazione di A sono state disegnate nella figura.
Per quanto riguarda il punto B si applicheranno le relazioni già viste:
v B = v A + ω 2 × AB
aB =
dv A dv AB
+
= a A + ω 2 × (ω 2 × AB) + ω& 2 × AB
dt
dt
I poligoni di velocità e accelerazione sono stati costruiti nella figura. Quello di accelerazione di B è
stato per chiarezza traslato, conservando i rapporti e le grandezze dei vettori. Nella costruzione è
anche rappresentato il centro di istantanea rotazione della biella, la cui posizione è utile per la
determinazione rapida della velocità angolare ω2. Infatti il poligono delle velocità per B non può
essere costruito, senza conoscere ω2. Utilizzando la proprietà secondo la quale il modulo della
velocità di A è uguale al prodotto ω2*CA, si ottiene immediatamente ω2. Per la costruzione del
poligono di accelerazione di B è necessario conoscere ω3. Per questo è sufficiente considerare che
la velocità vB, precedentemente determinata è in modulo uguale a ω3*O1B. Si sommeranno quindi
in serie i vettori aA, ω22*AB e quindi si traccerà una linea indefinita normale ad AB (linea d’azione
di ω& 2 × AB . Per poter chiudere il poligono è necessario ripartire da B, tracciare il vettore ω23*O1B
nel verso da B verso O1 e tracciare una linea indefinita perpendicolare a questo che rappresenta la
linea d’azione della ω& 3 O1 B . L’intersezione delle linee indefinite tracciate fornisce la punta del
vettore aB.
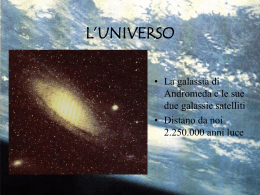
Modello a segmenti dell’arto inferiore.
Lo
studio
biomeccanico
del
movimento degli arti
Y4
inferiori e superiori
X4
trae grande beneficio
dall’assimilare l’arto
Y5
ad un sistema di corpi
rigidi, articolati per
Y3
mezzo
di
giunti
X3
X5
rotoidali.
La
Y6
modellazione dell’arto Y0
Y
2
richiede una serie di
X6
X2
ipotesi semplificative
Y7 X
che
rendono
il
7
Y1
problema facilmente
X1
trattabile, pur con
risultati di notevole
rilevanza applicativa. Alcune di queste ipotesi sono:
Corpi indeformabili
Giunti corrispondenti ai modelli ideali presentati
In molti casi una semplificazione ancora più spinta si ha considerando il moto dell’arto come un
moto piano, cioè trascurando i gradi di libertà corrispondenti all’esistenza di giunti sferici, piuttosto
che rotoidali piani. Sulla base di queste ipotesi di prima approssimazione si può impostare
un’analisi cinematica dell’arto, seguendo i principi esposti precedentemente.
Nel modello in figura si è costruito un sistema articolato che rappresenta il corpo come un unico
elemento rigido e i due arti rappresentati come sistemi articolati con tre segmenti, il femore, la
tibia, il piede. Il problema che qui si formula è quello di calcolare la posizione di un qualunque
elemento ( ad esempio la posizione del baricentro del tronco oppure quella della caviglia avanzata
in funzione degli angoli assunti dai vari segmenti. E’ pratica usuale, normalmente vantaggiosa,
quella di riferirsi agli angoli che i vari segmenti formano con il segmento precedente (ad esempio
l’angolo di piegamento del ginocchio o quello formato dagli assi X del tronco e del femore). E’
anche opportuno tenere conto dei limiti fisiologici alla rotazione degli arti, ad esempio l’angolo di
piegamento del ginocchio si può ritenere esteso al campo da 0 a – 160 gradi. Tutte le terne dislocate
in corrispondenza dei giunti sono terne destre con l’asse z sempre normale al piano del disegno ed
uscente.
La posizione dell’origine del sistema 4 (baricentro del corpo) rispetto al sistema X0,Y0 risulta data
dall’espressione:
⎧0⎫
⎪0⎪
⎪ ⎪
0
1
2
3
P4 = T1 ∗ T2 ∗ T3 ∗ T4 ∗ ⎨ ⎬
⎪0⎪
⎪⎩1 ⎪⎭
Con i sistemi di riferimento solidali ai vari segmenti si potrà quindi trovare la posizione di ogni
punto del corpo (anche, se lo si desidera, di un punto all’interno di un segmento particolare).
Applicazione
Si considerino i seguenti dati:
a = lunghezza femore = lunghezza tibia = 0,45 m
α10 = 0 dx10= 0
dy10=0
α21 = -110° dx21 =
a * cos α21 0 dy21=
a * sin α21
α32 = 0 dx32 = - 0.45
dy32 = 0
α43 = 0 dx43 = -0,4
dy43=0
Si lascia il calcolo
numerico
dell’applicazione
alla diligenza del
lettore.
Y4
Y5
Y3
X5
X3
Y0
Analisi cinematica.
X4
Y6
Y2
X6
X2
Y7
Y1
X1
X7
X0
L’analisi cinematica ha come obbiettivo quello di determinare le velocità ed accelerazioni in
qualunque punto del sistema articolato, quando siano date le velocità angolari dei giunti. Con
riferimento al modello articolato precedente, si osservi che l’analisi può cominciare dall’origine del
sistema X1,Y1, in quanto questo punto corrisponde alla cerniera dell’arto, che ruota quindi intorno a
questo punto sinchè il piede non si solleva da terra. La velocità del punto O2, origine del sistema di
riferimento 2 è data dalla relazione :
v O2 = α& 12 × O 1 O 2
se si assume che durante il movimento di rotazione dell’arto arretrato la gamba sia tesa, cioè sia
α& 23 = 0 si ottiene anche
vO = vO = α& 12 × O 1 O 3
3
5
Per la determinazione della velocità del punto O4, origine del sistema di riferimento, occorre
stabilire se il tronco ruota rispetto al femore. Se cosi fosse, la velocità del punto O4, origine del
sistema di riferimento 4, sarebbe:
v O4 = v O3 + (α& 12 + α& 34 ) × O 3 O 4
Un discorso assolutamente analogo vale per le accelerazioni e non verrà quindi qui ripetuto in
dettaglio. Si rimanda a quanto detto in generale per la determinazione delle accelerazioni.
Cinematica inversa.
Il problema trattato precedentemente è un problema di cinematica diretta. La cinematica inversa
parte invece dalla conoscenza della posizione dell’ultimo elemento, nel nostro caso del baricentro
del corpo, per giungere a determinare i valori degli angoli delle articolazioni che la rendono
possibile. Questo problema non è in genere univocamente determinato in quanto possono esistere
diversi sistemi di angoli che danno luogo alla stessa posizione del baricentro. La trattazione della
cinematica inversa viene rimandata ai testi spcializzati, in particolare quelli di robotica ed esula
dagli argomenti di base trattati in questo testo.
Analisisi del movimento umano
Le analisi svolte precedentemente ci permettono di affrontare il problema dell’analisi del
movimento umano, sia per quanto riguarda la deambulazione lenta ( l’atto del camminare), sia per
quanto riguarda la corsa. L’approccio può essere sia analitico che sperimentale. Gli obbiettivi sono
in genere quelli della ricerca di patologie degli arti, o del rachide spinale, che si riflettono
immediatamente nella deambulazione, oppure la ricerca dell’ottimizzazione delle prestazioni nelle
discipline sportive. Non è compito di questo testo trattare a fondo questi argomenti di carattere
specialistico. Qui si intende soltanto accennare agli approcci normalmente impiegati per questo tipo
di analisi
.
La figura illustra alcuni dei modelli biomeccanici che possono essere usati per l’analisi del passo
nella deambulazione, lenta o veloce. Il primo modello si occupa soltanto del movimento dei due
segmenti della gamba, femore e tibia, dal punto di vista cinematico. Sulla base di dati
antropometrici desunti dall’esperienza, è facile costruire il modello in modo tale che l’angolo
formato dal femore col tronco vari tra due limiti opportunamente scelti. Analogamente per
l’angolo formato dalla tibia col femore. Introducendo le leggi di variazione dei due angoli per
incrementi successivi e risolvendo rispetto alle coordinate della caviglia (il piede non è
rappresentato nel modello adottato) si ottiene la legge di variazione della posizione di quest’ultima
rispetto ad un sistema di coordinate fisso, con origine nell’articolazione dell’anca. Con questo
semplicissimo modello è possibile simulare alcuni artefatti, relativi a ben conosciute patologie. Ad
esempio un non corretto coordinamento della pendolazione della tibia rispetto al femore, una non
completa estensione del ginocchio, etc. Sperimentalmente si può ricorrere all’applicazione di
piccole sorgenti luminose in corrispondenza dei giunti. Il confronto dei dati ottenuti dal modello
con quelli sperimentali può fornire elementi utili per formulare una diagnosi, nel caso della
presenza di elementi patologici, o per elaborare strategie di miglioramento delle prestazioni nelle
discipline sportive. E’ importante accennare al fatto che sul mercato esistono pacchetti applicativi
finalizzati allo studio della biomeccanica del movimento umano. Alcuni di questi permettono una
raffinata modellazione di tutti i componenti, segmenti ossei, masse muscolari, tendini, introducendo
per ciascuno di essi le appropriate caratteristiche meccaniche, incluso in alcuni casi il
comportamento non lineare dei materiali.
I modelli rappresentati precedentemente possono anche prestarsi ad un’analisi dinamica, che
tenga conto delle forze scambiate tra i vari segmenti del corpo durante l’atto di moto e delle forze
scambiate con l’ambiente esterno, in particolare col terreno. Per svolgere questo tipo di analisi è
necessario inglobare nel modello tutti gli elementi che scambiano forze con il corpo durante la corsa
o la deambulazione, in particolare i muscoli. E’ necessario ricordare che, mentre durante l’atto del
camminare un piede è sempre a contatto col terreno, la corsa è una successione di salti. Tra un
contatto e l’altro il corpo compie una traiettoria libera, che è determinata dalle forze trasmesse dal
terreno al piede del corridore. E’ necessario ricordare che vale a questo proposito il principio della
conservazione della quantità di moto, cioè quando il corpo si stacca dal terreno, se si prescinde dalla
resistenza dell’aria che esercita una modesta azione di rallentamento, trascurabile in prima
approssimazione, il corpo tende a conservare la sua quantità di moto sinchè non si presenta una
forza esterna a variarla. Questa forza si presenta all’”atterraggio”, durante il quale il piede
interessato prende contatto col terreno, arrestando bruscamente il suo moto e costituendo il punto di
appoggio per il salto successivo.
Scaricare