APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
LUCA LUSSARDI
1. Il problema delle quadrature dall’Antichità al Rinascimento
Uno dei primi problemi matematici dell’Antichità legati allo sviluppo del calcolo infinitesimale consiste calcolo delle aree di figure piane, o del volume di figure solide. Il
classico problema della quadratura ha le sue origini nell’antica Grecia, e in generale esso
consisteva nel determinare, con il solo uso della riga e del compasso, un quadrato equivalente ad una figura piana assegnata; uno si può anche porre il problema della cubatura,
ovvero della determinazione, sempre con riga e compasso, di un cubo con lo stesso volume di una figura spaziale assegnata. La necessità di poter effettuare la costruzione
limitandosi all’uso esclusivo di riga e compasso riflette il fatto che per gli antichi greci la
geometria era un sapere costruttivo, oltre che teorico. La teoria della quadratura delle
figure piane notevoli si può inquadrare come applicazione di varie proposizioni contenute
negli Elementi di Euclide (300 a.C. circa), opera monumentale composta tra il IV e il III
sec. a.C. Ad esempio, è facile decomporre un triangolo in un rettangolo ad esso equivalente, ed ancora un rettangolo in un quadrato ad esso equivalente. Avendo quindi compreso
come trasformare un triangolo in un quadrato equivalente, risultava allora semplice la
trattazione di un poligono generale: prima va suddiviso in triangoli, ogni triangolo viene
quindi trasformato in quadrato, e alla fine basta “sommare” i quadrati cosı̀ ottenuti applicando, in modo opportuno, il teorema di Pitagora. Tutto questo meccanismo funziona
fino a che uno si limita alle figure poligonali, ma i problemi cominciano a diventare più
seri di fronte alle figure curve, ad esempio il cerchio. È ormai entrato nel linguaggio
comune l’uso dell’espressione quadrare il cerchio per caratterizzare l’impossibilità di una
prova. Infatti, la costruzione di un quadrato equivalente ad un cerchio assegnato, con uso
esclusivo di riga e compasso, è impossibile, anche se questo fatto è stato rigorosamente
dimostrato molti anni più tardi rispetto alla civiltà greca antica, ed anzi è una conquista
della matematica moderna. Per i greci quindi problemi come la quadratura del cerchio
con riga e compasso, o la rettificazione della circonferenza, restarono senza soluzione, e
per questo motivo la teoria della quadratura delle figure piane nel senso costruttivo del
termine fu abbandonata, limitandosi a fornire semplicemente un modo che consentisse
perlomeno il calcolo dell’area di una figura piana, o del volume di un solido. Tuttavia,
1
2
LUCA LUSSARDI
anche il problema, apparentemente più facile, di trovare formule per il calcolo di aree o
volumi presenta delle insidie, soprattutto quando uno affronta le figure curve: il calcolo
dell’area del cerchio, la figura curva più semplice che uno possa tracciare nel piano, presenta già notevoli difficoltà. Bisogna quindi ideare un metodo che va oltre l’applicazione
immediata degli assiomi più elementari della geometria euclidea.
1.1. Il metodo di esaustione. Allo scopo di dimostrare la validità di una formula che
consentisse il calcolo dell’area di un cerchio, i greci idearono un opportuno strumento di
approssimazione che rientra nella teoria delle grandezze omogenee, misurabili e continue.
L’idea parte dallo studio della nozione di lunghezza di un segmento; è infatti possibile un
criterio di confronto tra segmenti, un’operazione di addizione tra segmenti, una proprietà
di divisibilità, ovvero un segmento si può dividere in un numero arbitrario di parti uguali
tra loro, e la cosiddetta proprietà di Eudosso-Archimede, individuata da Eudosso di Cnido
(400 a.C. circa), e che si può trovare anche negli Elementi: se le due lunghezze A e B
sono tali per cui, ad esempio, 0 < A < B allora esiste un naturale n tale che nA > B.
Ci sono altri esempi di grandezze per le quali valgono queste proprietà: la misura degli
angoli nel piano, l’area delle figure piane, o ancora il volume delle figure solide. Il metodo
di esaustione è una significativa applicazione della proprietà di Eudosso-Archimede, ed
è fondato sul seguente teorema:
Teorema 1.1. (Proposizione I, Libro X degli Elementi) Se A e B sono due grandezze omogenee, misurabilie continue tali che 0 < A < B, se da B viene sottratta una
grandezza maggiore della sua metà, se da ciò che resta viene sottratta ancora una quantità maggiore della sua metà, e ripetendo continuamente questo procedimento, allora
prima o poi resta una quantità minore di A.
Il metodo di esaustione rappresenta, in un certo senso, il primo metodo di integrazione
della storia: diciamo subito che il rigore assoluto che tale metodo possiede si rivedrà solo
nel XIX secolo con l’integrale di Cauchy. Nonostante ciò, è troppo difficile da applicare,
e soprattutto possiede un grosso svantaggio, rispetto al moderno calcolo integrale; non si
tratta infatti di uno strumento di calcolo, bensı̀ di un metodo puramente dimostrativo:
esso dimostra in modo rigoroso la validità di certe uguaglianze tra aree o volumi, dedotte
per altra via. Tipicamente, il metodo di esaustione procede, come dice il nome stesso,
esaurendo una figura con una successione di figure all’interno di essa: da una figura si
sottrae una parte maggiore della sua metà, dalla figura restante si sottrae ancora una
parte maggiore della sua metà e cosı̀ via, e si arriva quindi ad una figura più “piccola” di
ogni figura arbitrariamente fissata. Il rigore dei greci sfiora per un attimo la definizione
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
3
di limite, nozione che troveremo formalizzata ben duemila anni più tardi. In modo
completamente rigoroso, dunque, lo sfruttamento dell’infinito potenziale (una grandezza
non è mai infinita, ma può diventare arbitrariamente piccola o arbitrariamente grande)
permise ai greci di determinare aree e volumi di figure curve. La più classica applicazione
del metodo di esaustione è la determinazione dell’area del cerchio. La procedura si avvale
del seguente teorema:
Teorema 1.2. (Proposizione I, Libro XII degli Elementi) Le aree di due poligoni
simili inscritti in due distinte circonferenze stanno tra loro come i quadrati dei rispettivi
raggi.
Tale teorema permette di dedurre il seguente fatto definitivo:
Teorema 1.3. (Proposizione II, Libro XII degli Elementi) Le aree di due cerchi
stanno tra loro come i quadrati dei rispettivi diametri.
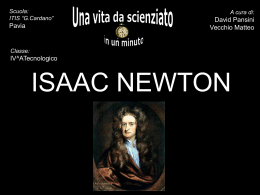
Dimostrazione. Per dimostrare questo teorema Euclide mette in atto il metodo di esaustione. Prima di tutto facciamo un’osservazione che sarà utile strada facendo, e precisamente, riferendoci alla figura 1, consideriamo una corda AB di una data circonferenza,
e il punto C sulla circonferenza di modo tale che il triangolo ABC sia isoscele sulla
base AB. Allora è facile verificare che l’area di ABC è maggiore della metà dell’area
del settore circolare circoscritto ad ABC: infatti, se uno costruisce il rettangolo ABED
come in figura si ha che l’area S del settore circolare ABC è minore dell’area di tale
rettangolo, che vale il doppio dell’area del triangolo ABC. Questa idea sta alla base del
procedimento di esaustione ideato da Euclide.
Figura 1. L’area di ABC vale più della metà dell’area del settore circolare ABC.
Siano infatti dati due cerchi C1 e C2 di raggi R1 e R2 e siano A1 e A2 le rispettive aree.
Va mostrato che
R12
A1
=
.
2
R2
A2
4
LUCA LUSSARDI
Sia
A1 R22
.
R12
Supponiamo, per assurdo, che sia A < A2 . Cominciamo a inscrivere nel cerchio C1 un
A=
quadrato. Si vede subito che l’area di tale quadrato, che vale 2R12 , è maggiore di
A1
.
2
Infatti, il lato del quadrato circoscritto a C1 vale 2R1 , per cui si ha A1 < 4R12 da cui
2R12 >
A1
.
2
Mettiamo ora quindi in atto l’idea osservata precedentemente, e costruiamo l’ottagono
regolare che ha quattro vertici pari a quelli del quadrato e gli altri quattro nei punti
medi degli archi di C1 sottesi dai lati del quadrato. Iterando questo ragionamento si
arriva dunque ad un poligono inscritto in C1 di 2n lati, di area che denotiamo con
(1)
(2)
Pn . Ripetiamo la stessa costruzione sul cerchio C2 e denotiamo con Pn
le aree dei
corrispondenti poligoni inscritti in C2 . Avendo poligoni simili per ogni scelta di n si ha
allora, grazie al teorema precedentemente dimostrato, che
(1)
Pn
(2)
Pn
R12
A1
= 2 =
.
R2
A
(1)
Essendo Pn < A1 , deve quindi essere
Pn(2) < A.
(1.1)
(2)
Ma, per esaustione A2 − Pn risulta minore di ogni area arbitrariamente fissata, a patto
di prendere n abbastanza grande, e dunque esiste un intero positivo n̄ tale che
(2)
A2 − Pn̄ < A2 − A
(2)
ovvero Pn > A che contraddice la (1.1). Invertendo i ruoli tra C1 e C2 e ponendo ora
B=
A2 R12
R22
segue che non può essere B < A1 . Supponiamo quindi che sia A > A2 . Allora si avrebbe
subito
A2 R12
A1 A2
=
< A1
2
R2
A
che abbiamo mostrato non sussistere. Ne segue che deve essere A = A2 che conclude la
B=
verifica.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
5
Figura 2. Particolare dell’esaustione del cerchio.
Grazie a questo teorema è possibile il calcolo dell’area del cerchio di raggio R: infatti,
basta considerare l’area c del cerchio di raggio 1, per avere che l’area A del cerchio di
raggio R soddisfa
A
= R2
c
da cui A = cR2 . La costante c è quella che fu poi denotata con il simbolo π, di valore 3.14
circa, calcolato con considerazioni empiriche; ne segue la formula oggi nota per l’area del
cerchio di raggio R, ovvero A = πR2 .
1.2. Archimede: rigore e ingegno. Per quanto riguarda la determinazione dell’area
del cerchio ce la siamo cavata appoggiandoci a teoremi intuitivi, dal momento che il cerchio è la figura curva più semplice, ma per curve più complesse? Come intuire le formule
corrette per le quadrature da dimostrare poi per esaustione? Archimede di Siracusa
(250 a.C. circa) ci mostra dei bellissimi esempi di come dedurre formule da dimostrare
da considerazioni di tipo meccanico: questo trucco di Archimede è stato scoperto solo ai
primi del Novecento quando il filologo danese Heiberg scoprı̀ in un palinsesto1 conservato
a Costantinopoli un’opera di Archimede fino a quel momento sconosciuta, battezzata poi
come Metodo. Archimede quindi, nel Metodo, mostrerà come ha dedotto la validità di
certe formule geometriche, che dimostrò con il metodo di esaustione: sono ad esempio
1In
filologia, un palinsesto è un supporto, tipicamente una pagina manoscritta, che è stata scritta,
cancellata e poi riscritta.
6
LUCA LUSSARDI
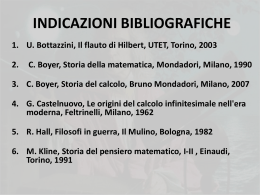
Figura 3. Equilibrio di una leva e segmento parabolico.
trattate la quadratura del segmento parabolico e la determinazione del volume della sfera. Osserveremo in particolare l’uso combinato di metodi meccanici, come l’equilibrio
delle leve, e di metodi che molto assomigliano a ciò che 1700 anni più tardi saranno gli
indivisibili di Cavalieri. Analizziamo, per esempio, come Archimede riuscı̀ a giungere
alla formula corretta che fornisce l’area di un segmento parabolico, la cui dimostrazione
per esaustione si trova nell’opera Quadratura della parabola. Consideriamo la figura 3 di
riferimento per tutto quello che segue. Sia dato quindi l’arco di parabola AC: Archimede intendeva scoprire la formula che fornisce l’area del segmento parabolico determinato
da tale arco, ovvero l’area della regione sottesa da tale arco di base il segmento AC;
useremo un linguaggio matematico moderno, ma le stesse idee e le stesse costruzioni di
Archimede. L’equazione della parabola è data da
|OP | = m|AO|(|AC| − |AO|)
per un certo coefficiente m > 0. Sia t la tangente all’arco di parabola nel punto C; allora
l’equazione di t è data, utilizzando le notazioni in figura, da
|OM | = m|AC|(|AC| − |AO|).
Archimede sapeva tracciare le tangenti alla parabola, problema risolto da Apollonio,
limitatamente alle coniche, alla fine del III secolo a.C., sul quale ritorneremo in seguito.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
7
Ne segue che
(1.2)
|OP | |AC| = |OM | |AO|
e questa relazione vale per ogni punto P dell’arco di parabola. Precisamente in questo punto arriva il colpo di genio: Archimede nella relazione (1.2) non vide solo della
geometria, bensı̀ la condizione di equilibrio di una leva. Infatti, la (1.2) esprime la condizione di equilibrio di una leva con peso |OP | in un estremo e braccio |AC|, e peso
|OM | nell’altro estremo, con braccio |AO|. Il genio siracusano piazzò questa ipotetica
leva nel modo più furbo tra tutti, secondo il seguente ragionamento: se F è il punto di
intersezione tra la tangente t e la retta ortogonale ad AO e K è il punto medio di AF ,
allora K è il fulcro della leva che si trova lungo il segmento N H, essendo |AD| = |AC|.
Il punto N sarà dunque il punto medio di OM , e rappresenta l’estremo della leva dove
è applicato il peso materializzato dal segmento OM . Allo stesso modo, il punto H è
l’altro estremo dell’asta dove viene applicata la materializzazione del segmento OP . Si
osservi ora che il segmento OM può essere pensato concentrato in N , suo punto medio.
Dunque, la totalità dei segmenti OM viene ad essere concentrata lungo il segmento CK.
Cosı̀ facendo, la totalità di questi pesi può essere pensata come applicata nel baricentro
G del triangolo AF C. Quindi la leva HKG, con la totalità dei segmenti parabolici in H
e la totalità dei segmenti OM in G, è in equilibrio. Essendo |AF | = m|AC|2 si ha
m
AAF C = |AC|3
2
e quindi, se denotiamo con S l’area del segmento parabolico, l’equilibrio della leva fornisce
m
m
|AC|
S|AC| = |AC|3
= |AC|4 .
2
3
6
In definitiva, la formula trovata da Archimede dice che l’area S del segmento parabolico
vale
m
|AC|3 .
6
Archimede osservò che la formula trovata si può scrivere in modo più semplice, in termini
S=
del triangolo isoscele ABC inscritto nel segmento parabolico assegnato, come in figura
4. Infatti, si ha
1
m
m
T = AABC = |AC| |AC|2 = |AC|3
2
4
8
da cui la più semplice formula:
4
S = T.
3
È stata trovata una formula candidata ad essere l’area del segmento parabolico dato. Archimede ora procederà dimostrando per esaustione il risultato ottenuto per via empirica;
non entriamo nel dettaglio della dimostrazione di Archimede, ma illustriamo solamente
8
LUCA LUSSARDI
Figura 4. L’area del segmento parabolico è in funzione dell’area di ABC.
a grandi linee la procedura utilizzata. Anzitutto, va costruita un’opportuna esaustione
del segmento parabolico, come in figura 5. Si può verificare che la successione delle aree
cosı̀ determinate vale
T+
T
T
T
+
+ ··· + n + ···
4
16
4
Figura 5. Particolare dell’esaustione applicata al segmento parabolico.
Archimede a questo punto sfruttò l’identità, da lui dimostrata rigorosamente, data da
1
1
1
4
1
(1.3)
1+ +
+ ··· + n +
=
n
4 16
4
3·4
3
per concludere che
T
T
T
4
T+ +
+ ··· + n + ··· = T
4
16
4
3
che è la tesi.
1.3. La ripresa del XVI secolo. La ripresa lenta e faticosa della matematica nel
tardo medioevo è principalmente dovuta all’invenzione della stampa a caratteri mobili:
tale scoperta impresse un’accelerazione spaventosa alla diffusione della conoscenza in
generale. Una delle prime opere matematiche ad essere messa a stampa fu ovviamente
data dagli Elementi di Euclide. La stampa delle opere di Archimede avvenne invece
solo verso la fine del XVI secolo, a Basilea, e questo contribuı̀ al rifiorire dell’interesse
verso i problemi lasciati aperti; ricordiamo però che il Metodo, nel quale Archimede
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
9
spiega le considerazioni sulle leve e sui baricentri, verrà scoperto solo nel Novecento,
per cui i matematici del XVI secolo dovettero riscoprire gli strumenti che fossero in
grado di arrivare ai risultati descritti da Archimede. Va ricordato l’italiano Francesco
Maurolico (1494-1575) che riuscı̀ a ricostruire la teoria dei centri di gravità dei solidi
corredando il tutto con numerose dimostrazioni per esaustione, metodo che resisteva
ancora a quel tempo, non avendo i matematici alternative. Tra gli scritti dell’italiano
Luca Valerio (1552-1618) troviamo una prima importante novità: per la prima volta
infatti vengono trattate classi generali di figure, invece che curve o solidi particolari.
Questo fatto rappresenta il primo tentativo di abbandono della matematica classica, che
aveva sempre distinto tra figure geometriche dichiarate, con tanto di nome, da altre
figure geometriche di scarso interesse. Valerio infatti, nel suo trattato De centro gravitas
solidorum oltre a riprendere solidi ben noti, fornı̀ una trattazione anche per una classe
generale di figure, le figure decrescenti, mostrando che gli stessi strumenti si applicano
molto più in generale. Queste considerazioni sono l’inizio di una serie di ricerche sulle
quadrature e sul calcolo dei volumi che, per la prima volta, abbandoneranno il metodo
di esaustione, per andare alla ricerca di metodi di calcolo.
1.4. Gli indivisibili di Cavalieri. La direzione di ricerca intrapresa sfocerà nell’ultimo
vano tentativo: la teoria degli indivisibili geometrici chiude la ricerca sulle quadrature
prima che il calcolo degli integrali, molti anni più tardi, possa essere sviluppato. Bonaventura Cavalieri (1598-1647), allievo di Galileo, cercò di considerare in che rapporto
stanno i volumi dei solidi di rotazione a partire dal rapporto tra le figure piane che li
generano, ma trovò subito delle incongruenze: ad esempio, il cilindro è il triplo del cono
inscritto, ma è generato, per rotazione, da un rettangolo che è il doppio del triangolo
che genera il cono. Cavalieri si accorse che l’apparente errore viene aggirato cambiando
il punto di vista: mettendo cioè i due solidi con la stessa altezza uno accanto all’altro,
con le basi su uno stesso piano, e affettandoli con una famiglia di piani paralleli alla
base. Nella sua opera Geometria indivisibilibus continuorum nova quadam ratione promota, pubblicata nel 1635, Cavalieri espose il seguente teorema, oggi noto anche come
Principio di Cavalieri:
Teorema 1.4. (Teorema IV, Libro II della Geometria indivisibilibus) Se due
superfici piane disgiunte intercettate dallo stesso fascio di rette parallele formano corde
tra loro proporzionali a due a due con lo stesso fattore di proporzionalità, allora le due
superfici stanno in quello stesso rapporto. Analogamente, se due solidi disgiunti intercettati dallo stesso fascio di piani paralleli formano superfici proporzionali a due a due con
10
LUCA LUSSARDI
lo stesso fattore di proporzionalità, allora i due solidi stanno in quello stesso rapporto.
Stando alle attuali conoscenze matematiche, è da osservare che il Principio di Cavalieri
è una semplice conseguenza del teorema di Fubini-Tonelli per gli integrali multipli. Il
principio di Cavalieri è tuttavia fondato sul concetto poco chiaro e non classico di indivisibile geometrico e si contrappone al metodo di esaustione: è teoricamente più debole,
ma è più versatile, perlomeno si tratta quasi di uno strumento di calcolo. C’è quindi un
ritorno all’infinito attuale, bandito dai greci perché fonte inesorabile di guai, ma è comunque un passo in avanti; nonostante ciò, il problema delle quadrature non può essere
trattato meglio di cosı̀ ormai, e per fare il passo decisivo bisogna aspettare Newton e
Leibniz. Consideriamo, come unico esempio di applicazione del Principio di Cavalieri, il
problema della determinazione del volume della sfera di raggio R. Allo scopo, osserviamo
la costruzione della figura 6, dove l’arco di curva rappresenta un quarto di circonferenza.
Figura 6. Determinazione del volume della sfera con il Principio di Cavalieri.
Una rotazione completa attorno al segmento AD dell’arco BD genera quindi una superficie semisferica. Immaginiamo ora di prendere un piano ortogonale al segmento AD
che scorra da A verso D. Esso interseca la semisfera generata dalla rotazione del settore
ABD lungo EG, interseca il cilindro generato dalla rotazione del quadrato ABCD lungo
EH ed interseca il cono generato dalla rotazione del triangolo ACD lungo il segmento
EF . Applicando il teorema di Pitagora si ha
|EH|2 = |AG|2 = |AE|2 + |EG|2 = |EF |2 + |EG|2 .
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
11
Quindi il fascio di piani paralleli interseca i tre solidi ottenuti, cilindro C, semisfera S e
cono Q, lungo tre superfici le cui aree stanno in una certa relazione. Un’applicazione un
po’ spinta del principio di Cavalieri spaziale dice allora che deve essere
VC = VQ + VS
da cui
π 3 2 3
R = πR .
3
3
Ne segue che il volume della sfera di raggio R vale
VS = VC − VQ = πR3 −
4 3
πR .
3
2. Il problema delle tangenti dall’Antichità al Rinascimento
L’altro grande problema classico dal quale si originano ragionamenti di natura infinitesimale è il problema delle tangenti ad una curva piana.
2.1. Le tangenti nell’antica Grecia: Apollonio. Non troviamo molto nell’antichità
su questo problema: probabilmente ciò è dovuto al fatto che per i classici le sole curve
di interesse erano le curve dichiarate con tanto di nome, mentre curve generiche erano
pressoché inutili. La parola tangente non venne utilizzata dai Greci: essa è infatti il
participio presente del verbo di origine latina tàngere, che vuol dire toccare. In effetti,
pare che sia Euclide sia Apollonio usassero proprio il termine toccare per denotare la
proprietà che una retta tangente ha rispetto alla curva per la quale è tangente. Euclide,
nei suoi Elementi, limita la sua trattazione al caso della circonferenza, ma illustra con
profondità la caratteristica della tangente ad una circonferenza. Nella prossima proposizione è anzitutto racchiusa la definizione di tangente ad una circonferenza: è la retta
ortogonale al diametro nel punto di tangenza. Euclide è ben consapevole che questo
fatto è più profondo di quanto sembri, e per caratterizzare la tangenza dimostra che il
cosiddetto angolo di contingenza è nullo: non esiste un’altra retta che si possa mettere
tra la tangente e la circonferenza e che continui a incontrare la circonferenza in un solo
punto.
Teorema 2.1. (Proposizione XVI, Libro III degli Elementi) Quella retta che,
dalle estremità del diametro di un cerchio viene condotta ad angolo retto, cadrà al di
fuori del cerchio stesso; nello spazio compreso tra la stessa linea retta e la periferia non
cadrà altra retta; e invero l’angolo del semicerchio è maggiore di qualsivoglia angolo acuto
rettilineo, il rimanente è minore.
12
LUCA LUSSARDI
Dimostrazione. Mostriamo prima di tutto che ogni altra retta diversa dall’ortogonale al
diametro deve incontrare la circonferenza in un altro punto diverso dal punto di tangenza:
ci riferiamo alla figura 7.
Figura 7. La tangente r tocca la circonferenza solo nel punto di tangenza A.
Infatti, supponiamo, per assurdo, che la retta s per A ortogonale al raggio OA in A
incontri la circonferenza anche nel punto B diverso da A. Essendo il triangolo OAB
isoscele sulla base AB, deve essere OÂB = OB̂A. Ma l’angolo OÂB è retto e un triangolo
non può avere più di un angolo retto, e dunque si ha una contraddizione. Supponiamo
ora che ci sia un’altra retta s che si infila nella regione compresa tra la circonferenza e
r, ovvero che forma un angolo di contingenza rs
ˆ 6= 0; si veda la figura 8.
Figura 8. L’angolo di contingenza è nullo.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
13
Tracciamo il segmento OH perpendicolare a s in H. Allora deve essere |OA| > |OH|
dal momento che l’ipotenusa di un triangolo rettangolo è sempre maggiore di ciascuno
dei due cateti. Ma |OA| = |OB| da cui |OB| > |OH| che è assurdo.
La trattazione dell’angolo di contingenza è un fatto molto importante per la matematica. Infatti, Euclide stesso rileva, attraverso la sua dimostrazione, che gli angoli di contingenza curvilinei non costituiscono una famiglia di oggetti per i quali le corrispondenti
misure soddisfano la proprietà di Eudosso-Archimede.
Figura 9. Angoli di contingenza curvilinei.
Noi abbandoniamo ora gli Elementi e proseguiamo con l’evoluzione del concetto di
tangente. Se infatti per una circonferenza è addirittura troppo facile parlare di tangente,
visto che la nozione di tangenza si traduce in una semplice proprietà di ortogonalità tra
la retta e il diametro, cosı̀ non fu per curve leggermente più complicate: le coniche. Il
primo trattato sistematico sulle coniche risale ad Apollonio di Perga (250 a.C. circa), ed
è intitolato appunto Le coniche. Non entriamo nel dettaglio della teoria delle tangenti
secondo Apollonio, ma accenniamo almeno alla sua costruzione nel caso di un’ellisse;
considerazioni analoghe valgono per iperbole e parabola. La nozione di tangente ad una
conica viene data, da Apollonio, all’interno della teoria dei diametri: un diametro d di
una conica C è una corda che biseca un fascio di corde parallele.
Figura 10. d è un diametro per la conica C.
14
LUCA LUSSARDI
La nozione successiva è quella di diametri coniugati; la relazione di coniugio tra diametri
oggi viene presentato usando la polarità indotta da una conica. Riferendoci alla figura
11 diciamo che il diametro d è coniugato al diametro o se d biseca il fascio di corde
parallele a o: si dimostra che allora o biseca il fascio di corde parallele a d. Nella
situazione descritta dalla figura 11, Apollonio introdusse i termini ascissa e ordinata
per denotare rispettivamente il diametro d e il diametro o, passanti entrambi per il
loro punto in comune, punto medio di entrambi: i termini che usiamo noi oggi per la
geometria delle coordinate hanno quindi origine da opportuni riferimenti obliqui sulle
coniche. Finalmente, nella stessa figura 11 appare chiaro come tracciare la tangente t
alla conica C nel punto P : se P è estremo del diametro d allora si traccia per P la
parallela al diametro coniugato a d. Apollonio dimostrò che t non può incontrare la
conica C in un altro punto, e la dimostrazione ricalca quella data da Euclide per la
circonferenza; inoltre, dimostra che anche per le coniche l’angolo di contingenza è nullo.
La teoria delle tangenti è dunque squisitamente geometrica, e null’altro del resto ci si
poteva aspettare dai classici. In particolare, non vi è quindi nessun riferimento al fatto
che la tangente raccoglie in sè un’intersezione doppia con la curva, ma non dobbiamo
sorprenderci di questo fatto: infatti, Apollonio si è limitato a studiare le sezioni coniche,
e sappiamo che una retta generica ha al più due intersezioni con una conica, e quindi
appare ridondante contare la molteplicità di intersezione nel caso delle coniche, basta
semplicemente dire che una tangente ad una conica è una retta che interseca la conica
solo in un punto, che è il punto di tangenza.
Figura 11. Diametri coniugati e retta tangente a C in P .
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
15
Ma appena la curva si complica tutta la teoria cade a pezzi: il problema delle tangenti
resta senza soluzione fino alla grande svolta del XVI secolo, quando l’algebra viene in
aiuto della geometria.
2.2. Il metodo del cerchio tangente di Cartesio. Il primo grande punto di svolta
nella storia dell’intera matematica, ma anche nella storia della scienza in generale, sta
nell’introduzione delle coordinate, ovvero nell’algebrizzazione della geometria: la geometria analitica, che oggi si studia anche a scuola, ha infatti rivoluzionato il modo di fare
matematica, creando connessioni molto feconde tra algebra e geometria. Negli antichi
greci la geometria era il sapere autentico, mentre l’aritmetica dei numeri razionali era
discussa in chiave geometrica anch’essa. Con Cartesio (1596-1650) il punto di vista viene
capovolto: l’algebra viene in aiuto della geometria, si mette come fondamento ad essa,
e i problemi geometrici vengono tradotti in termini di equazioni. Lo scopo del metodo
cartesiano era quindi soprattutto quello di liberare la geometria dal ricorso alle figure,
mediante i procedimenti dell’algebra. Cosı̀ facendo, Cartesio nella sua Géométrie, edita
per la prima volta nel 1637, rivisitò molti problemi geometrici più o meno classici, come
ad esempio un celebre problema di Pappo, aperto da mille anni circa e agevolmente
risolto con l’uso del metodo delle coordinate cartesiane. Con la scoperta della geometria
analitica ritorna l’antico problema delle tangenti, risolto, come già sappiamo, limitatamente alle coniche, da Apollonio nel III secolo a.C. La situazione generale nella quale lo
stesso Cartesio si mise è quella della curva espressa come luogo dei punti del piano le cui
coordinate x, y risolvono un’equazione P (x, y) = 0. Cartesio chiamò tangente una retta
che ha intersezione almeno doppia con la curva nel punto di tangenza. Invece che cercare
la tangente in un punto della curva, Cartesio si propose di cercare un cerchio tangente
alla curva in quel punto; tracciando poi la retta per il punto della curva e il centro del
cerchio si trova la normale alla curva, che è perpendicolare alla tangente. Precisamente,
egli scrisse: “ Bisogna considerare che se questo punto C, il centro del cerchio cercato,
è come lo desideriamo, il cerchio di cui sarà il centro e che passerà per B vi toccherà la
curva senza intersecarla. Al contrario, se C è un po’ più vicino o un po’ più lontano di
quel che deve essere, il cerchio intersecherà la curva non solo nel punto B ma necessariamente anche in qualche altro B1 però tanto più questi due punti B e B1 sono vicini,
tanto minore sarà la differenza che sussiste tra le radici dell’equazione. Infine, se questi
punti giacciono ambedue in uno, cioè se il cerchio che passa per B vi tocca la curva
senza intersecarla, queste radici saranno assolutamente uguali.” Fissata in O l’origine
degli assi cartesiani, Cartesio decise di trovare il cerchio tangente alla curva in B che ha
16
LUCA LUSSARDI
centro sull’asse x, nel punto C, come in figura 12: in B devono quindi essere riunite due
intersezioni.
Figura 12. Cerchio tangente in B alla curva assegnata.
Sia B = (x0 , y0 ), e poniamo OC = d e BC = r. Allora, l’equazione della circonferenza
incognita sarà data da
(x − d)2 + y 2 = r2 .
Intersechiamo ora la curva con la circonferenza; abbiamo
(x − d)2 + y 2 = r2
P (x, y) = 0.
Eliminando y, e supponendo quindi di poterlo sempre fare in pratica, si arriva all’equazione risolvente Q(x) = 0 che dunque, per tangenza, deve dare il punto B contato almeno
due volte, ovvero deve essere
Q(x) = (x − x0 )2 R(x)
per un certo R(x).
Esempio 2.2. Vediamo ad esempio come trovare la generica tangente alla parabola di
equazione y − x2 = 0. Sia B = (x0 , y0 ). Dobbiamo quindi risolvere il sistema di equazioni
(x − d)2 + y 2 = r2
y − x2 = 0
eliminando y. Si trova subito l’equazione
(x − d)2 + x4 = r2
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
17
cioé
x4 + x2 − 2dx + d2 − r2 = 0.
Il polinomio risolvente, che è di quarto grado, deve quindi essere della forma
(x − x0 )2 (ax2 + bx + c)
per opportuni numeri reali a, b, c. A conti fatti, deve quindi essere
x4 + x2 − 2dx + d2 − r2 = ax4 + (b − 2ax0 )x3 + (ax20 + c − 2bx0 )x2
+ (bx20 − 2cx0 )x + x20 c
per ogni x reale. Ne segue che
a=1
b − 2ax0 = 0
ax20 + c − 2bx0 = 1
bx2 − 2cx0 = −2d
x2 c0 = d2 − r2 .
0
Il precedente sistema ha la soluzione data da
a=1
b = 2x0
c = 1 + 3x20
d = x0 + 2x30
r2 = x4 (1 + 4x2 ).
0
0
Ne segue che C ha coordinate (x0 + 2x30 , 0) e dunque la retta CB ha equazione cartesiana
y − y0 = −
y0
1
(x
−
x
)
=
−
(x − x0 ),
0
2x30
2x0
x0 6= 0.
L’ortogonale alla retta CB ha dunque equazione cartesiana
y − y0 = 2x0 (x − x0 )
che dunque è l’equazione della tangente alla parabola di equazione y = x2 nel punto
(x0 , y0 ). Il caso x0 = 0 si tratta a parte e la tangente risulta avere equazione y = 0.
Il metodo proposto da Cartesio appare quindi abbastanza complesso anche in casi molto semplici: esso diventa infatti computazionalmente pesante quando l’equazione della
curva è un polinomio di grado elevato. In particolare, osserviamo che il procedimento
può funzionare praticamente solo se l’equazione che esprime la curva assegnata è polinomiale: in altre parole, il metodo di Cartesio è sostanzialmente limitato alle sole curve
algebriche.
18
LUCA LUSSARDI
2.3. Il metodo delle adequazioni di Fermat. Cercando di risolvere il problema delle
tangenti ad una curva piana, un matematico dilettante francese sfiora, almeno formalmente, la nozione di derivata come limite del rapporto incrementale. Pierre de Fermat
(1601-1665) non è certo passato alla storia per questo, ma compı̀ un passaggio importante, poiché effettuò il primo tentativo, ovviamente del tutto inconsapevole, di un passaggio
al limite. L’idea di fondo su cui si basa Fermat è l’uso delle cosiddette adequazioni, utilizzate nell’opera Methodus ad disquierendam maximam et minimam del 1637 per la
determinazione dei massimi e minimi di una funzione. Fermat osservò anzitutto una
cosa già ben nota a quel tempo, e cioé che se una funzione ha un massimo, o minimo, in
un certo punto, allora essa è stazionaria nelle vicinanze di quel punto, ovvero varia poco
se ci si sposta poco dal punto di massimo, o dal punto di minimo. Dunque, ad esempio,
se f ha massimo in x0 , deve essere vera l’adequazione
f (x0 + e) ≈ f (x0 )
per e quantità abbastanza piccola ma non nulla. Ma Fermat capı̀ che è necessaria una
maggiore precisione; siccome quindi
f (x0 + e) − f (x0 )
deve essere già approssimativamente nullo anche per un e 6= 0, seguendo Fermat, deve
valere anche l’adequazione
f (x0 + e) − f (x0 )
≈0
e
che è la prima apparizione di un rapporto incrementale. Si semplifica quindi l’adequazione e si pone alla fine e = 0: in questo modo l’adequazione finale diventa un’equazione
in x0 , dalla quale si trovano i punti che rendono f stazionaria.
Esempio 2.3. Vediamo a titolo di esempio la determinazione dei punti di massimo e di
minimo, locali, della funzione f (x) = x2 (3 − x). Si ha
f (x + e) − f (x) = (x + e)2 (3 − x − e) − x2 (3 − x)
= −e3 − 3e2 x − 3ex2 + 3e2 + 6xe
per cui l’adequazione
f (x + e) − f (x)
≈0
e
diventa
−e2 − 3ex − 3x2 + 3e + 6x ≈ 0.
L’adequazione diviene equazione ponendo e = 0, e quindi si trova
−3x2 + 6x = 0
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
19
da cui due soluzioni possibili, x = 0 e x = 2. Seguendo i possibili ragionamenti di
Fermat, osserviamo che
f (2 + e) = 4 − 3e2 − e3 = f (2) − 3e2 − e3 .
Essendo e3 trascurabile rispetto ad e2 , notiamo che si avvertiva già una primordiale idea
di confronto di infinitesimi, si avrà che per e molto piccolo
f (2 + e) < f (2)
per cui x = 2 è il punto di massimo locale cercato, ed il valore massimo vale f (2) = 4.
In modo analogo, si ha
f (e) = 3e2 − e3 = f (0) + 3e2 − e3
per cui argomentando allo stesso modo si avrà che x = 0 è stavolta il punto di minimo
locale cercato, ed il valore minimo vale 0.
Nel successivo manoscritto De tangentibus linearum curvarum, Fermat risolse il problema della determinazione delle tangenti come applicazione del metodo per i massimi
e minimi. Illustriamo il procedimento utilizzato da Fermat per una funzione concava
y = f (x) facendo riferimento alla figura 13, in cui F è l’origine degli assi; in particolare,
il problema si riconduce a quello di determinare la cosiddetta sottotangente t = |GE|.
Denotiamo con g(x) l’equazione della retta tangente GA e consideriamo la differenza
h(x) = g(x) − f (x).
Grazie alla concavità di f si ha h ≥ 0 sempre e h(x0 ) = 0, essendo A = (x0 , f (x0 )). Ne
segue che h ha un minimo per x = x0 , e dunque deve essere vera l’adequazione
h(x0 + e) − h(x0 )
≈0
e
per e = |ED| piccolo, che si riduce a
(2.1)
h(x0 + e)
≈ 0.
e
Osserviamo ora che i triangoli GEA e GDB sono simili, da cui
AE : GE = BD : GD
da cui
|BD| =
|AE| |GD|
.
|GE|
Ne segue che
h(x0 + e) + f (x0 + e) = g(x0 + e) = |BD| =
|AE| |GD|
f (x0 )(t + e)
=
|GE|
t
20
LUCA LUSSARDI
Figura 13. Determinazione della sottotangente alla curva data in A.
da cui
h(x0 + e) + f (x0 + e)
f (x0 )(t + e)
=
e
te
cioé
h(x0 + e)
f (x0 )(t + e) f (x0 + e)
=
−
.
e
te
e
Dal momento che vale l’adequazione (2.1), deve essere
f (x0 )(t + e) f (x0 + e)
−
≈0
te
e
che è un’adequazione dalla quale si ricava t, ovvero la sottotangente.
(2.2)
Il caso in cui la funzione sia localmente convessa si tratta in modo analogo.
Esempio 2.4. Andiamo a cercare l’equazione della retta tangente alla funzione y =
√
x
nel generico punto A = (x0 , y0 ), con x0 > 0. Si tratta di una funzione concava, per cui si
può utilizzare direttamente l’adequazione (2.2) che permette di trovare la sottotangente
t. Precisamente, la (2.2) diventa
√
√
x0 (t + e)
x0 + e
−
≈ 0.
te
e
Si ha quindi
√
√
√
x0
x0
x0 + e
+
−
≈0
e
t
e
che fornisce la soluzione
√
√ √
√
e x0
e x0 ( x0 + e + x0 ) √ √
√
t≈ √
= x0 ( x0 + e + x0 ).
√ =
e
x0 + e − x0
Mettendo e = 0 si ha l’equazione
t=
√
√
√
x0 ( x0 + x0 ) = 2x0 .
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
21
Ne segue che l’equazione della retta tangente in A = (x0 , y0 ) è data da
√
x0
y − y0 =
(x − x0 )
2x0
ovvero
1
y − y0 = √ (x − x0 )
2 x0
e invero, procedendo come faremmo oggi, si ha proprio
1
√ = y 0 (x0 ).
2 x0
Osserviamo che per risolvere il problema delle tangenti si potrebbe anche utilizzare
direttamente la teoria delle adequazioni, senza ricondursi ad un problema di minimo o di
massimo. Infatti, se dobbiamo cercare l’equazione della retta tangente alla funzione y =
f (x) nel suo punto A = (x0 , y0 ) allora potremmo impostare direttamente l’adequazione
f (x0 + e) − f (x0 )
≈m
e
nella variabile m, da cui la retta tangente in A di equazione
(2.3)
y − y0 = m(x − x0 ).
Esempio 2.5. Vediamo ad esempio come funziona la (2.3) per la funzione y = xk con
k > 1 intero, esempio fondamentale per gli ciò che vedremo successivamente. Dobbiamo
risolvere l’adequazione
(x0 + e)k − xk0
≈m
e
Essendo noto che
k−2 2
2 k−2
(x0 + e)k = xk0 + kxk−1
+ kx0 ek−1 + ek
0 e + ak−2 x0 e + · · · + a2 x0 e
per certi coefficienti aj , per j = 2, . . . , k − 2, si trova l’adequazione
k−1
≈m
kxk−1
+ ak−2 xk−2
0 e + ··· + e
0
che diventa equazione ponendo e = 0, da cui
m = kxk−1
0 .
Dunque, la tangente alla curva data nel punto (x0 , y0 ) ha equazione
y − y0 = kxk−1
0 (x − x0 )
e invero, procedendo come faremmo oggi, si ha proprio
kx0k−1 = y 0 (x0 ).
22
LUCA LUSSARDI
Il metodo di Fermat potenzialmente si applica anche alle curve non algebriche, ma diventa molto complesso anche solo con la presenza di parecchi radicali, e presenta ostacoli
insuperabili quando l’equazione che descrive la curva è trascendente.
2.4. La costruzione cinematica delle tangenti. Accenniamo ad un ultimo metodo
per la ricerca delle tangenti, che nasce dall’esigenza di considerare anche le curve descritte
da movimenti meccanici. L’idea risale al matematico francese Gilles Personne de Roberval (1602-1675), e venne ripresa anche dall’italiano Evangelista Torricelli (1608-1647), e
consiste nello scomporre il moto del punto che descrive la curva in moti semplici per i
quali sia possibile determinare la direzione della velocità, ovvero la tangente, e quindi,
ricomponendo le direzioni, si ottiene la direzione della tangente alla curva assegnata. Il
punto essenziale di partenza è quindi quello di capire come una curva possa venir generata in modo meccanico, e anche varie curve algebriche ben note possono essere trattate.
Infatti, ad esempio, si dimostra che la parabola è descritta da un punto mobile che si
allontana da un punto fisso, il fuoco, con la stessa velocità con cui si allontana da una
retta fissa, la direttrice; oppure, l’ellisse è generata da un punto mobile che si avvicina
ad un fuoco con la stessa velocità con cui si allontana dall’altro fuoco; od ancora, l’iperbole è descritta dal punto che si avvicina ai fuochi, o si allontana da essi, con la stessa
velocità; infine, per fare un esempio che non sia una conica, la spirale di Archimede è
descritta da un punto mobile che ruota attorno ad un punto fisso con la stessa velocità
cui si allontana dal punto stesso. Si potrebbe continuare a fare esempi di curve a quel
tempo note, ve ne sono molte altre. Esaminiamo più nel dettaglio solamente un esempio,
e precisamente la cicloide, ovvero la curva descritta da un punto che sta sul bordo di un
cerchio il quale rotola senza strisciare su una guida rettilinea: si veda la figura 14.
Dopo aver descritto la costruzione per punti della curva, Roberval descrive la costruzione della
tangente inFigura
un punto E14.
qualsiasi
sulla basecinematica
della scomposizione
nei due moti
Costruzione
della tangente
alla simultanei.
cicloide. Per questo,
si tracci il cerchio generatore EBC in modo che passi per il punto E, si prenda un arbitrario
segmento orizzontale EF (direzione della velocità del moto traslatorio) e sulla tangente al cerchio
Il moto
di E della
è dato
dalladelcomposizione
seguenti
due moti:
(direzione
velocità
moto rotatorio) dei
si prenda
un segmento
EG, uguale ad EF perché le due
velocità di rotazione e di traslazione sono uguali. Il segmento EH, diagonale del parallelogrammo
• la circonferenza ruota attorno al suo centro;
EFHG, sarà la direzione della velocità del moto composto che genera la cicloide, e quindi sarà
tangente alla cicloide.
2.4. Successi e limiti dei metodi per le tangenti.
Prima di proseguire nella nostra storia, soffermiamoci per un momento a ricapitolare i successi e ad
esaminare i limiti dei metodi per le tangenti precedenti all’invenzione del calcolo. I tre metodi che
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
23
• il centro della circonferenza si muove di moto rettilineo uniforme.
Più precisamente, siccome c’è rotolamento senza strisciamento, quando il cerchio ha
fatto un giro completo, esso si è mosso di un segmento AD pari alla lunghezza della
circonferenza. Ne segue che il moto di traslazione del centro del cerchio avviene con la
stessa velocità, in modulo, del moto di rotazione della circonferenza attorno al suo centro.
Dunque è facile costruire le due velocità, la cui somma sarà la velocità di E, generico
−→
punto della cicloide come in figura: la velocità EF è dovuta al moto di traslazione, che
−−→
è orizzontale, mentre la velocità EG, uguale in modulo, è dovuta alla rotazione ed è
−→
−−→
−−→
tangente alla circonferenza. Sommando i due vettori EF ed EG si ha la velocità EH
che risulta essere tangente alla cicloide in E.
2.5. Ulteriori considerazioni sul problema delle tangenti. Siamo giunti alla conclusione della prima parte della storia del calcolo. Per il problema delle tangenti abbiamo
tre principali tentativi di soluzione: il metodo di Cartesio del cerchio tangente è lungo e
complicato e va bene solo per le curve algebriche; il metodo delle adequazioni di Fermat
avvicina considerazioni più fini ma fallisce quando l’espressione della curva è troppo complicata; infine, il metodo cinematico richiede di conoscere perlomeno da che movimenti
è composto il moto lungo la curva. Tutti i metodi fino a questo momento ideati hanno
varie caratteristiche comuni: si tratta di metodi globali, cioé considerano la curva nella
sua globalità, mentre la tangente è un concetto locale, e inoltre, a parte il metodo cinematico per certi aspetti, si propongono di determinare la sottotangente, che permette
di risolvere il problema. La svolta decisiva si avrà solo quando si riuscirà a capire che
le difficoltà del problema vanno spezzate: va ideato quindi un calcolo che permetta di
separare le difficoltà. Nonostante le difficoltà, si può comunque dire che i fondamenti
concettuali del calcolo differenziale siano però stati compresi, anche se manca il passaggio
decisivo che avrebbe permesso di creare un calcolo generale vero e proprio. Quello che
invece manca del tutto, e che sarà invece un contributo essenziale che daranno Newton
e Leibniz, è la comprensione del fatto che il problema delle quadrature è l’inverso del
problema delle tangenti, che quindi, non a caso, sarà battezzato teorema fondamentale
del calcolo, nome che si usa ancora oggi.
3. Newton: il calcolo delle flussioni
Isaac Newton nasce a Woolsthorpe, in Inghilterra, il 25 dicembre 1642, giorno che
corrisponde al 4 gennaio 1643 secondo l’attuale calendario gregoriano, a quel tempo non
ancora entrato in vigore in Inghilterra. Nel 1653 comincia gli studi alla King’s School
nella città di Grantham e durante questo periodo mostra già particolari doti di inventore,
24
LUCA LUSSARDI
costruendo orologi e modelli funzionanti di mulini. Nel 1661 Newton entra nel prestigioso Trinity College di Cambridge: qui studia principalmente Aristotele, ma ben presto
sposta la sua attenzione verso letture più moderne, ovvero Cartesio, Galileo, Copernico
e Keplero. Attorno a 23 anni di vita interrompe gli studi al college a causa di un’epidemia di peste originatasi a Londra: in questo periodo, che trascorre a casa in campagna,
inizia l’invenzione del calcolo infinitesimale e la scoperta della teoria della gravitazione
universale. Diventa dunque professore di matematica a Cambridge nel 1669. Nel 1670
inizia l’attività di ricerca vera e propria di Newton, e fino al 1672 lo studio dell’ottica lo tiene impegnato: sono ormai celebri i suoi studi sulla rifrazione della luce e sulla
scomposizione della luce bianca; a tal proposito, nel 1704 pubblica l’Opticks. Negli stessi anni porta a compimento la teoria della gravitazione universale e dietro consiglio di
Edmund Halley, nel 1684 pubblica la sua prima opera su tale argomento, il De Motu
Corporum, mentre tre anni più tardi pubblica i Philosophiae Naturalis Principia Mathematica, comunemente chiamati Principia: questo capolavoro è considerato un pilastro
della storia della scienza, con esso Newton stabilisce le tre leggi universali della dinamica, che ancora oggi si studiano in un corso di fisica generale, e tratta nel dettaglio la
teoria della gravitazione universale dimostrando, in particolare, che le orbite dei pianeti
soggetti alla sola forza di gravità sono necessariamente ellittiche, con il sole in uno dei
due fuochi. Con la pubblicazione dei Principia, Newton entra nella storia, inizia una
profonda amicizia con vari scienziati importanti dell’epoca e arrivano successivamente i
riconoscimenti ufficiali: Newton diviene, nel 1699, direttore della Zecca Reale, nel 1703
diventa quindi presidente della Royal Society di Londra e due anni dopo viene investito
del titolo di cavaliere dalla Regina Anna. Ricordiamo infine che Newton non ha dedicato la sua vita solamente alla scienza, ma si è occupato, con altrettanto vivo interesse,
anche di alchimia e di teologia. Isaac Newton muore a Londra il 20 marzo 1727 e viene
sepolto nell’Abbazia di Westminster. Newton, come abbiamo accennato nella sua breve
biografia, comincia i suoi studi di calcolo infinitesimale durante gli anni in cui fugge
dalla peste scoppiata a Londra, quindi tra il 1665 e il 1666. Il calcolo infinitesimale,
o calcolo delle flussioni seguendo la terminologia che Newton utilizza, ha quindi inizio
molto prima del fatidico 1684, anno in cui appare la prima opera di Leibniz sul calcolo
differenziale. Non abbiamo in verità prove inconfutabili che Newton effettivamente era
a conoscenza del suo calcolo delle flussioni già negli anni 1665/66, dal momento che egli
non pubblicherà mai nulla di tutto ciò: il lavoro The Method of Fluxions and Infinite
Series, che presenta gli studi di calcolo infinitesimale di Newton, viene infatti composto
nel 1671 ma edito a Londra solo nel 1736, quindi postumo. Nonostante questo, tanti
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
25
risultati, ad esempio presenti nei Principia, potevano essere trovati solamente ricorrendo
al calcolo infinitesimale, per cui questo suggerisce che Newton doveva in effetti essere in
possesso del calcolo almeno al momento della stesura dei Principia. In effetti, è vero che
nei Principia non si trova traccia del calcolo delle flussioni, ma Newton vi espone invece
una teoria sulla quadratura delle regioni piane attraverso un procedimento di approssimazione per eccesso e per difetto che è sostanzialmente l’idea che usiamo ancora oggi
per definire l’integrale di Riemann. Egli chiama questo modo di ragionare come metodo
delle prime e ultime ragioni, e cosı̀ si esprime in proposito: “Queste ultime ragioni con
cui le quantità divengono evanescenti non sono realmente le ragioni di quantità ultime,
bensı̀ limiti verso cui le ragioni delle quantità, decrescendo oltre ogni limite, sempre convergono, e ai quali si avvicinano più di ogni differenza data, senza mai oltrepassarle, né
mai raggiungerle effettivamente prima che le quantità siano diminuite all’infinito.” In
altre parole, Newton ha afferrato il concetto di passaggio al limite ma non è pienamente
consapevole del fatto che proprio su esso si possa fondare in modo rigoroso il calcolo
infinitesimale. Esiste in ogni caso anche un motivo ben preciso per il quale Newton
decide di non pubblicare i suoi risultati di calcolo infinitesimale. Infatti, egli è ancora
molto legato al mondo classico, ed in particolare alla geometria greca: in un certo senso
è l’ultimo dei classici, dal momento che Leibniz invece avrà il coraggio di esporre le sue
idee non classiche e di abbandonare dunque definitivamente il punto di vista classico,
ormai destinato a tramontare. Newton è quindi dell’idea che una dimostrazione corretta
e rigorosa di un fatto matematico debba necessariamente essere condotta utilizzando gli
strumenti classici.
3.1. Il calcolo delle flussioni. Il metodo delle flussioni corrisponde al moderno calcolo
delle derivate rispetto al tempo: Newton ha infatti una concezione cinematica del calcolo
infinitesimale. Per questo motivo, egli considera le variabili geometriche come variabili
fluenti, cioé che variano nel tempo, e le indica con le lettere x, y, z, v, . . . , e considera
poi le velocità con cui le variabili fluenti variano nel tempo, e chiama queste velocità
flussioni, indicate rispettivamente con ẋ, ẏ, ż, v̇, . . . , notazione ancora oggi in uso in meccanica razionale; infine vengono anche usate le lettere a, b, c, . . . per denotare quantità
fisse, ovvero le costanti. Newton fissa quindi un incremento infinitesimo temporale, che
indica con o, e chiama momento della variabile x la quantità ẋo, che corrisponde ad un
incremento infinitesimo della variabile x. Tutto è pronto per impostare il primo problema che Newton si pone: da una relazione tra variabili fluenti, trovare la relazione tra le
flussioni. Supponiamo quindi che sia data una relazione P (x, y, z, . . . ) = 0 tra variabili
26
LUCA LUSSARDI
fluenti x, y, z . . . . Seguendo Newton, si legge che siccome i momenti di x, y, z, . . . , dati rispettivamente da ẋo, ẏo, żo, . . . sono molto piccoli rispetto a x, y, z, . . . , allora deve
valere anche
P (x + ẋo, y + ẏo, z + żo, . . . ) = 0.
Dopo aver rimaneggiato la relazione precedente, Newton conclude dicendo che siccome
o è infinitamente piccolo, allora si può considerare nullo e quindi deduce cosı̀ la relazione
tra le flussioni ẋ e ẏ. Notiamo che quindi i ragionamenti di Newton non si allontanano
molto dai ragionamenti dei matematici che lo hanno preceduto, ad esempio dal metodo
delle adequazioni di Fermat.
Esempio 3.1. Consideriamo l’equazione
x2 − axy = 0.
(3.1)
Operando come detto si ha
(x + ẋo)2 − a(x + ẋo)(y + ẏo) = 0
che diventa
x2 + 2xẋo + ẋ2 o2 − axy − axẏo − ay ẋo − aẋẏo2 = 0
ovvero, siccome per il momento o 6= 0,
2xẋ + ẋ2 o − axẏ − ay ẋ − aẋẏo = 0.
Ponendo ora o = 0 si trova la relazione voluta tra le flussioni ẋ e ẏ:
2xẋ − axẏ − ay ẋ = 0
(3.2)
che effettivamente coincide con la derivazione rispetto al tempo della (3.1).
Newton si rende quindi conto che può assegnare una regola algoritmica, e precisamente
afferma, nel caso in cui si abbiano espressioni polinomiali, di procedere come segue:
1) Ordinare la relazione assegnata secondo le potenze decrescenti di una variabile
fluente, ad esempio x.
2) Moltiplicare i termini cosı̀ ordinati uno per volta per il relativo esponente di x.
3) Moltiplicare quindi tutti i termini per ẋ/x e semplificare.
4) Rifare tutto il procedimento per tutte le altre variabili.
5) Sommare tutte le relazioni trovate e uguagliare a 0 la somma cosı̀ ottenuta.
Newton ci mostra anche come trovare la relazione tra le flussioni anche nel caso di relazioni irrazionali, e questo esempio fa vedere quanto il metodo delle flussioni sia migliore
dei metodi precedenti: è finalmente un vero strumento di calcolo.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
27
Esempio 3.2. Ad esempio, consideriamo la relazione
x−
√
b
− y + x = 0.
a+y
Basta effettuare dei cambi di variabile, ponendo
b
= z,
a+y
√
y+x=v
per avere la nuova relazione x − z − v = 0 dalla quale si ricava, applicando la regola,
ẋ − ż − v̇ = 0.
Dalla posizione su z si ricava invece az + yz − b = 0 che fornisce
aż + ẏz + y ż = 0
mentre dalla posizione su v si ricava invece y + x − v 2 = 0 che fornisce
ẏ + ẋ − 2v v̇ = 0.
Abbiamo dunque il sistema di relazioni tra le flussioni
ẋ − ż − v̇ = 0
aż + ẏz + y ż = 0
ẏ + ẋ − 2v v̇ = 0.
Eliminiamo ora le variabili ausiliarie ż e v̇ si trova facilmente
ẋ +
ẏ + ẋ
bẏ
− √
=0
2
(a + y)
2 y+x
che è la relazione cercata.
Ovviamente la teoria non procede solo per esempi, ma Newton osserva alcune proprietà
che si deducono dalla sua procedura, e che quindi forniscono delle vere regole di calcolo.
Ad esempio:
z = x ± y =⇒ ż = ẋ ± ẏ,
z = xy =⇒ ż = ẋy + xẏ,
z=
x
ẋy − xẏ
=⇒ ż =
,
y
y2
z = xk =⇒ ż = kxk−1 ẋ.
Siamo quindi nella direzione giusta: le difficoltà adesso sono state spezzate e sono state
individuate le regole del calcolo. Il calcolo delle flussioni è quindi pronto per essere
applicato.
28
LUCA LUSSARDI
3.2. Sui problemi di massimo e minimo. Una delle prima applicazioni del calcolo
delle flussioni che Newton ci offre è rappresentata dalla risoluzione di problemi di massimo
e di minimo. Più precisamente, è data la solita relazione tra fluenti, P (x, y, z, . . . ) = 0.
Newton osserva che se la variabile x, per esempio, in quanto fluente, assume massimo o
minimo in un certo istante temporale, in questo stesso istante essa inverte la sua flussione,
per cui nell’istante di inversione deve essere ẋ = 0. Lo stesso discorso vale chiaramente
per ogni altra variabile presente nella relazione. Dunque, in definitiva, se ad esempio
la variabile x va massimizzata o minimizzata, basta ricavare la relazione tra le flussioni
delle variabili date, porre ẋ = 0, e semplificare le eventuali altre flussioni restanti in
modo da arrivare ad una relazione tra le sole fluenti, relazione che va messa in sistema
con la relazione assegnata.
Esempio 3.3. Consideriamo la relazione x − y 2 + 1 = 0 e ci chiediamo i valori massimi
o minimi assunti dalle variabili x, y. Scriviamo subito la relazione tra le flussioni, ovvero
(3.3)
ẋ − 2y ẏ = 0.
Iniziamo dalla variabile y. Ponendo ẏ = 0 si avrebbe ẋ = 0, soluzione che Newton
esclude, ed invero y è una variabile illimitata; si veda la figura 15.
Figura 15. La relazione x − y 2 + 1 = 0.
Cercando invece di estremizzare la variabile x si ha, mettendo ẋ = 0 nella (3.3), l’equazione −2y ẏ = 0 dalla quale, eliminando la soluzione inaccettabile ẏ = 0, si deduce che
y = 0, e dunque stavolta si trova il sistema
x − y2 + 1 = 0
y=0
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
29
che ha come soluzione x = −1. Riscriviamo ora che la (3.3) come ẋ = 2y ẏ e cerchiamo
di ragionare ora come avrebbe potuto ragionare Newton. Mettiamoci nel punto (−1, 0):
osserviamo quindi che se y parte da 0 e cresce, allora la sua flussione diventa positiva,
per cui y ẏ ≥ 0 da cui ẋ ≥ 0 mentre se y parte da 0 e decresce, allora la sua flussione
diventa negativa, e resta dunque sempre y ẏ ≥ 0 da cui ancora ẋ ≥ 0. In ogni caso quindi
x fluisce crescendo dal valore x = −1, per cui x = −1 è il valore minimo per x.
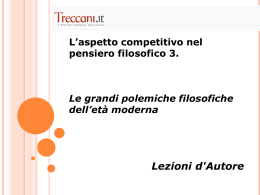
3.3. Le tangenti. Vediamo come il metodo delle flussioni possa essere applicato per la
risoluzione del problema delle tangenti. Newton considera le stesse situazioni geometriche
dei suoi predecessori, quindi analizza la figura 16. Sia fissata in O l’origine degli assi
cartesiani e sia data la curva OBE come in figura, descritta dalla relazione tra le variabili
x e y, diciamo, al solito, P (x, y) = 0. Allo scopo di determinare la tangente in B Newton
sposta ancora graficamente la sua attenzione alla sottotangente, ma stavolta le regole del
calcolo delle flussioni permettono di agevolare i conti anche su espressioni complicate.
Infatti, poniamo |OA| = x e |AB| = y e diamo un incremento temporale infinitamente
piccolo, ovvero |AC| = oẋ e |DE| = oẏ.
Figura 16. La tangente T B alla curva OBE nel punto B.
Essendo l’incremento temporale o molto piccolo, il punto E sarà approssimativamente
sulla tangente T B e dunque Newton scrive la proporzione che esprime la similitudine tra
il triangolo T AB e il “triangolo” BDE, ovvero
T A : AB = BD : DE
30
LUCA LUSSARDI
da cui
|T A|
oẋ
=
y
oẏ
e quindi
ẋ
ẏ
che permette di determinare il punto T , e quindi la retta tangente T B semplicemente
|T A| = y
(3.4)
come retta passante per due punti, T e B.
3.4. Centri di curvatura. Una significativa applicazione del calcolo delle flussioni è
rappresentata dalla determinazione dei centri di curvatura delle curve piane. Seguiamo
il ragionamento di Newton analizzando la figura 17. Proponiamoci quindi di determinare
il centro di curvatura C della curva assegnata, nel suo punto D. Tracciamo per prima
cosa la tangente T D, che sappiamo già come determinare. Il segmento DC è quindi
perpendicolare a T D. Costruiamo quindi il punto G intersecando la parallela ad AB
condotta da D con la parallela a BD condotta da C, e consideriamo un generico punto
g sul segmento CG. Tracciamo la parallela ad AB passante per g, che interseca DC in
δ. Si ha subito una prima proporzione, che discende dalla similitudine tra il triangolo
Cgδ ed il triangolo T BD:
(3.5)
Cg : gδ = T B : BD.
Muoviamo ora il punto D facendogli fare un incremento infinitesimo che lo porta nel
punto d: se C è il centro di curvatura in D allora il segmento dC deve essere ortogonale
a Dd in d. Tracciamo l’altezza de e sia F il punto di intersezione tra dC e DG; sia inoltre
f il punto di intersezione tra dC e gδ. Ponendo |AB| = x e |BD| = y, possiamo allora
scrivere
(3.6)
|De| = ẋo,
|de| = ẏo,
˙
|δf | = −(gδ)o.
Per il secondo teorema di Euclide si ha poi, essendo de altezza relativa all’ipotenusa DF ,
|de|2
|eF | =
|De|
da cui
|de|2
(3.7)
|DF | = |De| + |eF | = |De| +
.
|De|
Potendo porre quindi, per arbitrarietà, |Cg| = 1 e ponendo |gδ| = z, la (3.5) diventa
1 : z = |T B| : |BD| = |De| : |de| = ẋ : ẏ,
cioé
z=
ẏ
.
ẋ
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
31
Figura 17. Determinazione del centro di curvatura C.
Tenuto conto poi delle (3.6), la (3.7) può essere riscritta come
|DF | = ẋo +
ẏ 2 o
ẋ
e dunque si ha che la proporzione geometrica
1 : |CG| = |δf | : |DF |
fornisce
ẋ2 + ẏ 2
.
ẋż
Potendo ora scegliere ẋ = 1 possiamo quindi scrivere, siccome diventa z = ẏ,
|CG| = −
1 + z2
|CG| = −
.
ż
Notiamo che la formula precedente ha senso dal momento che ż < 0. È ora semplice
determinare anche il raggio di curvatura DC: infatti, ancora per similitudine si ha
|DG| : |gδ| = |CG| : |Cg|
da cui
|DG| = −
z(1 + z 2 )
.
ż
32
LUCA LUSSARDI
e quindi, per il teorema di Pitagora,
√
2
p
1 + z2
(1
+
z
)
|DC| = |DG|2 + |CG|2 =
.
|ż|
Newton a questo punto estrae una regola operativa: l’obiettivo è determinare z e ż in
funzione di x e y in modo tale da poter determinare poi la quantità
1 + z2
ż
che si traccia graficamente scendendo da D lungo la perpendicolare ad AB; basta poi
|DH| = −
condurre da H la parallela ad AB fino al punto C di modo tale che
z(1 + z 2 )
ż
trovando cosı̀ il centro di curvatura C. Il problema è dunque risolto se determiniamo z
|HC| = −
e ż in funzione di x e y, ricordando che durante il ragionamento fatto abbiamo posto
ẋ = 1 e di conseguenza ẏ = z. Osserviamo che tutto questo ragionamento vale per una
configurazione come nella figura 17; altre configurazioni si trattano in modo analogo.
Descriviamo quindi, in modo algoritmico, qual è la procedura da seguire. Sia quindi
data la relazione P (x, y) = 0.
1) Per prima cosa troviamo la nuova relazione R(x, y, ẋ, ẏ) = 0.
2) Poniamo ẋ = 1 e ẏ = z, avendo cosı̀ S(x, y, z) = R(x, y, 1, z) = 0.
3) Troviamo dunque la relazione T (x, y, z, ẋ, ẏ, ż) = 0.
4) Poniamo ancora ẋ = 1 e ẏ = z, avendo cosı̀ U (x, y, z, ż) = T (x, y, z, 1, z, ż) = 0.
5) Il sistema
S(x, y, z) = 0
U (x, y, z, ż) = 0
ci fornisce z e ż in funzione di x e y.
6) Con z e ż possiamo quindi determinare
1 + z2
,
ż
che forniscono la posizione di C.
|DH| = −
|HC| = −
z(1 + z 2 )
ż
Prima di passare alla procedura inversa, ovvero da una relazione tra flussioni alla relazione tra le fluenti, e vederne qualche applicazione, facciamo un’importante osservazione
legata proprio alla determinazione dei centri di curvatura. Come è ben noto oggi, infatti,
la curvatura di una curva è una quantità legata alla derivata seconda della parametrizzazione, mentre Newton se la cava sempre e solo con una sola flussione: il trucco consiste
nel passare alla variabile z, che infatti è stata posta pari a ẏ, e dunque ż sarebbe ÿ.
Newton non introduce mai una accelerazione delle fluenti, quindi per Newton il calcolo
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
33
infinitesimale è solo al primo ordine, piuttosto introduce nuove variabili fluenti, come
appena visto per la determinazione dei centri di curvatura.
3.5. Il metodo delle serie infinite. Fino a questo momento, come il lettore avrà certamente osservato, abbiamo quasi sempre trattato esempi di curve descritte da equazioni
algebriche; è pur vero che Newton descrive, mediante opportuni cambi di variabili, come, ad esempio, trovare la relazione tra le flussioni se la relazione tra le fluenti contiene
radicali anche complicati, e inoltre illustra le regole di calcolo che permettono di analizzare una difficoltà alla volta. Nonostante questo passo in avanti però restano escluse dal
discorso, ad esempio, le curve trascendenti, che rappresentavano un problema anche per
tutti i predecessori di Newton. Per questo tipo di curve Newton fa un’assunzione che oggi
ci appare drastica, ma che può essere compresa se pensiamo che a quel tempo il concetto
generale di funzione come legge di corrispondenza tra variabili non era ancora presente:
Newton assume che tutte le funzioni, sostanzialmente, siano esprimibili come sviluppi in
serie di potenze, eventualmente anche a esponenti negativi. Certamente per molte funzioni trascendenti, come esponenziali o funzioni circolari questa procedura è corretta, ma
per altre no: l’analisi di Newton quindi non è completa se pensiamo al concetto di funzione inteso come oggi lo intendiamo, ma risulta sufficientemente esausitva relativamente
alle conoscenze dell’epoca. La teoria delle serie infinite ideata da Newton costituisce il
punto di forza, secondo Newton stesso, del suo calcolo: infatti, come vedremo, Newton
riesce sempre, in ogni caso, a invertire la procedura che fa passare dalla relazione tra le
fluenti alla relazione tra le flussioni, che quindi è una sorta di integrazione delle relazioni
tra le flussioni: per fare questo però è necessario ricondursi sempre a serie, infinite in
generale, di potenze e quindi poi operare su queste, praticamente, come diremmo oggi,
integrando per serie, cioé termine a termine. In questo modo Newton riuscirà a risolvere
completamente i problemi che si era posto: dalle fluenti alle flussioni e viceversa dalle
flussioni alle fluenti; ma il risultato di quest’ultima operazione resta solo teorico poiché
Newton non è poi in grado di identificare, in generale, il risultato di un’integrazione di
una relazione tra flussioni, che resta quindi solamente scritto come formale sviluppo in
serie di potenze. Per inciso, non esiste ovviamente ancora alcun concetto di convergenza
delle serie, cosa che arriverà molti anni dopo. Newton mostra anche come sia possibile
riscrivere varie operazioni come divisioni ed estrazioni di radici, per sviluppi in serie.
Uno dei primi esempi che Newton fa è la divisione
a2
b+x
34
LUCA LUSSARDI
che sviluppa come
a2
a2 a2 x a2 x 2 a2 x 3 a2 x 4
=
− 2 + 3 − 4 + 5 − ...
b+x
b
b
b
b
b
In particolare, viene dedotto l’importante sviluppo in serie
1
= 1 − x2 + x4 − x6 + x8 − · · ·
1 + x2
Successivamente, passa ad esaminare come sviluppare una radice quadrata, trovando,
per esempio, che
√
x2
x4
x6
+ =a+
−
+
− ···
2a 8a3 16a5
Non andiamo oltre questo argomento e torniamo al calcolo delle flussioni.
a2
x2
3.6. Dalle flussioni alle fluenti. Il passaggio da una relazione
P (x, y, z, . . . , ẋ, ẏ, ż, . . . ) = 0
ad una relazione del tipo R(x, y, z, . . . ) = 0 è ben più problematico del passaggio opposto
già analizzato: infatti, stavolta si tratta di effettuare, come diremmo oggi, un’integrazione
di una relazione tra flussioni. Proprio per questo problema Newton sfrutta il suo metodo
delle serie infinite: in questo modo, in linea teorica, Newton riesce a integrare ogni
relazione tra flussioni. Analizziamo un esempio solo nel caso più significativo che Newton
tratta, ovvero il caso in cui si abbia una relazione assegnata del tipo P (x, y, ẋ, ẏ) = 0
che possa essere messa in una delle seguenti forme:
ẋ
ẏ
= Q(x, y),
= S(x, y)
ẋ
ẏ
essendo Q(x, y), S(x, y) polinomiali in x e y, eventualmente anche uno sviluppo in serie
infinita. Allora, in questo caso Newton trova un algoritmo che consente di ricavare la
relazione y = T (x), con T (x) eventualmente serie infinita di potenze di x.
Esempio 3.4. Supponiamo sia data la relazione
ẏ
= 1 − 3x + y + x2 + xy.
ẋ
Anzitutto, va spezzata la parte che contiene solo x dal resto della relazione, ottenendo
ẏ
= (1 − 3x + x2 ) + (y + xy).
ẋ
Costruiamo ora una tabella come segue:
1
y
∗
xy
∗
somma 1
y=
...
−3x +x2
... ...
∗
...
... ...
... ...
0
...
...
...
...
...
...
...
...
...
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
35
Compiliamo ora la tabella. Consideriamo l’1 sulla prima riga della tabella; moltiplichiamolo per x ottenendo x = x1 e dividiamolo quindi per 1, il suo esponente visualizzato
esplicitamente, ottenendo x. Quest’ultimo x lo mettiamo al posto di y nelle due espressioni che ci sono in colonna a sinistra, ottenendo rispettivamente x e x2 . Mettiamo
questi ultimi due termini in tabella come segue:
1
y
∗
∗
xy
somma 1
y=
...
−3x +x2
x
...
∗
x2
... ...
... ...
0
...
...
...
...
...
...
...
...
...
Ora ripartiamo con lo stesso ragionamento dal termine −3x, secondo termine della prima riga. Questo lo sommiamo all’x sottostante, trovando −2x, moltiplichiamo per x,
ottenendo −2x2 , che va diviso per l’esponente di x, cioé 2, da cui troviamo −x2 ; infine
mettiamo −x2 al posto di y nelle due espressioni che ci sono in colonna a sinistra, ottenendo rispettivamente −x2 e −x3 : mettiamo questi ultimi due termini in tabella come
segue:
1
y
∗
xy
∗
somma 1
y=
...
−3x +x2
0
2
x −x . . .
∗
x2 −x3
... ... ...
... ... ...
...
...
...
...
...
Facciamo ancora un passaggio solo, quindi ripartiamo con lo stesso ragionamento dal
termine +x2 , terzo termine della prima riga. Questo lo sommiamo ai sottostanti, trovando x2 , moltiplichiamo per x, ottenendo x3 , che va diviso per l’esponente di x, cioé
3, da cui troviamo x3 /3; infine mettiamo x3 /3 al posto di y nelle due espressioni che
ci sono in colonna a sinistra, ottenendo rispettivamente x3 /3 e x4 /3: mettiamo questi
ultimi due termini in tabella come segue:
1
y
∗
xy
∗
somma 1
y=
...
−3x +x2
0
...
x −x2 x3 /3 . . .
∗
x2 −x3 x4 /3
... ...
...
...
... ...
...
...
E cosı̀ via, la procedura in generale non ha termine. Compiliamo ora la riga della somma
semplicemente sommando in colonna:
36
LUCA LUSSARDI
1
y
∗
xy
∗
somma 1
y=
...
−3x +x2
0
...
2
3
x −x
x /3
...
2
3
∗
x
−x
x4 /3
−2x +x2 −2x3 /3 + · · ·
... ...
...
...
Infine, per trovare l’ultima riga è sufficiente moltiplicare ogni addendo per x e dividerlo
per l’esponente relativo alla x; abbiamo quindi finalmente
1 −3x +x2
0
...
2
3
y
∗ x
−x
x /3
...
2
3
xy
∗
∗
x
−x
x4 /3
2
3
somma 1 −2x +x
−2x /3 + · · ·
2
3
y=
x −x +x /3 −x4 /6 + · · ·
da cui la soluzione
x3 x4
−
+ ···
y =x−x +
3
6
2
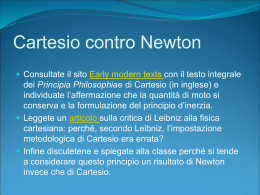
3.7. La quadratura delle curve. Finalmente Newton, dopo aver analizzato il problema che consiste nel passare da una relazione assegnata tra flussioni alla corrispondente
relazione tra le fluenti, applica questa procedura alla quadratura delle curve piane: concludiamo la nostra analisi sul lavoro di Newton proprio con la prima apparizione di quello
che sarà noto poi come teorema fondamentale del calcolo integrale, ovvero la comprensione che quadratura e calcolo delle flussioni sono due problemi l’uno inverso dell’altro.
Analizziamo la seguente figura.
Figura 18. Quadratura della curva ADE.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
37
È assegnata la curva ADE come in figura, dunque una relazione P (x, y) = 0 avendosi
|AB| = x e |BD| = y. Poniamo
z = Area (ABD).
Diamo quindi un incremento temporale infinitesimo o: si avrà |BC| = ẋo e |F E| = ẏo.
Essendo o infinitamente piccolo si ha che il momento della variabile z può essere scritto,
ricordando la formula che fornisce l’area di un trapezio, come
żo =
(y + y + ẏo)ẋo
ẏ ẋo2
(|BD| + |CE|)|DF |
=
= y ẋo +
2
2
2
da cui
ż = y ẋ +
ẏ ẋo
2
e dunque, ponendo o = 0, si giunge a
(3.8)
ż = y ẋ.
Potendosi scegliere ẋ = 1, la (3.8) diventa la fondamentale
(3.9)
ż = y
che rappresenta la versione newtoniana del teorema fondamentale del calcolo integrale.
Il problema della quadratura della curva ADE si risolve dunque trovando, dalla relazione
P (x, y) = 0 la relazione tra z e x, ottenuta “integrando” la relazione (3.9).
4. Leibniz: il calcolo differenziale
Gottfried Wilhelm Leibniz nasce a Lipsia, in Germania, il 1◦ luglio 1646. Figlio di
un professore universitario di diritto, entra all’Università di Lipsia nel 1661 e prende
la laurea in Giurisprudenza nel 1666; in questo stesso anno pubblica anche i suoi primi lavori di logica matematica. Dal 1668 comincia a viaggiare attraverso l’Europa per
missioni diplomatiche e proprio durante i periodi che trascorre a Parigi, in Olanda e a
Londra conosce personalità di spicco del mondo scientifico: in particolare entra in contatto epistolare con Oldenburg, il segretario della Royal Society di Londra, e quindi,
indirettamente, anche con Newton. Nel 1676 rientra in Germania, ad Hannover, e nel
1680 comincia a dedicarsi agli studi e alla stesure di molte delle sue opere, che spaziano dalla filosofia alla logica, e in particolare le opere matematiche. Sulla rivista Acta
Eruditorum, da lui fondata nel 1682, pubblica, nel 1684, l’articolo che fissa le notazioni e le regole definitive del calcolo differenziale, ovvero Nova Methodus pro Maximis et
Minimis. L’ultima parte della vita di Leibniz è contrassegnata dalla disputa sorta tra
lui e Newton per l’attribuzione dell’invenzione del calcolo infinitesimale. Leibniz passa
gli ultimi anni della sua vita nella disgrazia a causa delle accuse di plagio e muore ad
38
LUCA LUSSARDI
Hannover il 14 novembre 1716. L’anno 1684 rappresenta quindi la nascita ufficiale del
calcolo infinitesimale, dal momento che solo in quest’anno per la prima volta appaiono
pubblicati, con l’uso delle notazioni definitive, metodi propri del calcolo differenziale e
del calcolo integrale: ricordiamo infatti che Newton non pubblicherà nessun risultato
sul calcolo delle flussioni, nonostante ne fosse già in possesso nel 1666. Leibniz viene in
contatto indiretto con Newton negli anni del suo soggiorno a Parigi prima e a Londra
poi: in questo periodo infatti Leibniz intrattiene una notevole corrispondenza epistolare
con Barrow, Collins Oldenburg, e quest’utlimo, a sua volta, gira le lettere a Newton. In
queste lettere, divenute più tardi tristemente famose per via della disputa che scoppierà,
Newton espone in modo chiaro il metodo delle serie infinite e dichiara di possedere il
calcolo delle flussioni, che però non esplicita mai: Leibniz dunque sa che Newton è già
in possesso del calcolo infinitesimale, ma la diversità notevole dell’approccio di Leibniz
rispetto a quello di Newton ci porta a pensare che egli non abbia carpito in nessun modo
il calcolo delle flussioni, ma che abbia invece sviluppato in modo autonomo il calcolo
differenziale. Infatti, mentre per Newton le variabili dipendono da una variabile temporale fittizia, Leibniz ha una concezione statica del calcolo, quindi, a prima vista, più
classica, per certi versi, di quella di Newton. Il concetto fondamentale su cui fa perno il
calcolo leibniziano è il concetto di differenziale di una variabile, tipicamente geometrica,
ovvero la differenza tra due valori assunti dalla variabile e infinitamente vicini tra loro.
Leibniz, a differenza di Newton, comprende meglio il fatto che in realtà le quantità di
interesse sono i rapporti tra differenziali e non i differenziali in sé; c’è inoltre un netto miglioramento nella comprensione del teorema fondamentale del calcolo integrale: Leibniz
arriva addirittura a dire che si potrebbe definire l’integrale come l’operatore inverso del
differenziale. Le ricerche di Leibniz sul calcolo differenziale conducono alla pubblicazione
dei primi manoscritti del 1673: egli riprende le ricerche di Fermat, di Pascal e di altri e si
propone soprattutto di determinare delle regole di calcolo e delle notazioni idonee. Questo progetto arriva lentamente a compimento con la già più volte citata pubblicazione
del 1684, Nova Methodus pro Maximis et Minimis.
4.1. Il differenziale. Leibniz concepisce il calcolo dei differenziali come estrapolazione
di un calcolo su variabili discrete: infatti, egli considera prima di tutto la situazione in
cui è data la variabile x che non forma un continuo geometrico, ma bensı̀ forma una
successione, o progressione, come viene chiamata dallo stesso Leibniz. Precisamente
quindi la variabile x assume valori discreti {xi }, in generale infiniti. Leibniz introduce
quindi l’operatore differenza ∆ che opera su x come segue:
∆i x = xi+1 − xi .
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
39
L’operatore ∆ trasforma quindi progressioni in progressioni: esso trasforma la progressione {xi } nella progressione degli incrementi {∆i x}. Per “estrapolazione” di ∆, viene
quindi definito l’operatore differenziale d il quale stavolta agisce sulla variabile continua
x pensata come progressione infinita dei suoi valori infinitamente vicini tra loro: Leibniz
insiste molto sul fatto che dx è una quantità infinitamente più piccola rispetto alla variabile x, considerazione che tornerà utile molto spesso. Osserviamo ora alcune proprietà
dell’operatore differenza ∆. Ad esempio,
∆i a = a − a = 0,
se a è una costante,
xi = yi =⇒ ∆i x = ∆i y
∆i (x + y) = xi+1 + yi+1 − xi − yi = xi+1 − xi + yi+1 − yi = ∆i x + ∆i y,
∆i (x − y) = xi+1 − yi+1 − xi + yi = xi+1 − xi − (yi+1 − yi ) = ∆i x − ∆i y.
Queste formule, estrapolando l’operatore ∆, diventano rispettivamente
da = 0,
se a è una costante,
x = y =⇒ dx = dy
e
d(x + y) = dx + dy,
d(x − y) = dx − dy.
Passiamo ora ad esaminare invece le due ultime proprietà meno ovvie. Anzitutto, si ha
∆i (xy) = xi+1 yi+1 − xi yi = yi+1 (xi+1 − xi ) + xi (yi+1 − yi ) = yi+1 ∆i x + xi ∆i y
dalla quale, per estrapolazione, segue che
(4.1)
d(xy) = (y + dy)dx + xdy = ydx + xdy + dxdy.
Osservando bene la relazione (4.1) Leibniz si accorge che qualcosa non torna tra membro
di sinistra e membro di destra: a sinistra infatti vi è una quantità infinitamente più
piccola di xy mentre a destra vi è, oltre alla somma ydx + xdy che è dello stesso ordine di
infinitesimo del membro di sinistra, anche la quantità dxdy che invece è un infinitesimo di
ordine più elevato rispetto a ydx + xdy, dal momento che è prodotto di due infinitesimi.
Per far tornare un bilancio di ordini di infinitesimo deve quindi essere
d(xy) = ydx + xdy
che è la definitiva regola di differenziazione del prodotto. Infine, per quanto riguarda il
quoziente di due variabili si ha
x
xi+1 xi
xi+1 yi − xi yi+1
yi (xi+1 − xi ) − xi (yi+1 − yi )
∆i
=
−
=
=
y
yi+1
yi
yi+1 yi
yi+1 yi
40
LUCA LUSSARDI
da cui
(4.2)
x
ydx − xdy
ydx − xdy
d
=
= 2
.
y
(y + dy)y
y + ydy
Anche qui, dal momento che ydy è una quantità infinitamente più piccola rispetto a y 2
la (4.2) diventa la definitiva regola di differenziazione del quoziente data da
ydx − xdy
x
=
d
.
y
y2
Quella appena presentata è la teoria dei differenziali primi: in questo Leibniz giunge a
conclusioni corrette, nel senso che se prendiamo la relazione y = f (x) allora il rapporto
dy
dx
calcolato usando le regole di Leibniz coincide con la derivata prima di f . Difatti, secondo
le regole di Leibniz, differenziando la relazione y = f (x) si trova
dy = f 0 (x)dx
essendo f 0 la “nostra” derivata prima, e dunque
dy
= f 0 (x).
dx
4.2. Differenziali di ordine più elevato. Il prossimo step è il passaggio ai differenziali di ordine più elevato, primo vero elemento di novità rispetto al calcolo newtoniano.
Leibniz infatti osserva che una volta assegnata la progressione della variabile x, anche dx
è una variabile, e ricordiamo anche infinitamente più piccola di x, che forma una progressione infinita, e dunque ha senso considerare ddx, denotato anche con d2 x, e quindi per
ricorsione d3 x, d4 x, . . . Cosı̀ come dx è una quantità infinitamente piccola rispetto a x, il
differenziale secondo d2 x è una quantità infinitamente piccola rispetto a dx, il differenziale terzo d3 x è una quantità infinitamente piccola rispetto a d2 x, e cosı̀ via. Sfruttando
il calcolo dei differenziali successivi, che obbediscono alle stesse leggi dei differenziali
primi, Leibniz afferma che è dunque possibile scrivere infinite equazioni differenziali a
partire dall’equazione di una curva, differenziando ripetutamente l’espressione assegnata: siccome vengono usate solo le regole principali del calcolo differenziale, segue che
tutte le relazione via via trovate sono indipendenti dalla scelta delle progressioni delle
variabili in gioco. Se ad esempio differenziamo due volte la relazione y = f (x) otteniamo,
introducendo le nostre notazioni per le derivate prima e seconda di f ,
dy = f 0 (x)dx,
da cui
d2 y = f 00 (x)dx2 + f 0 (x)d2 x
d2 y
d2 x
00
0
=
f
(x)
+
f
(x)
.
dx2
dx2
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
41
Dunque il rapporto
d2 y
dx2
calcolato usando le regole di Leibniz, non coincide, in generale, con la derivata seconda di
f : per ottenere la derivata seconda a partire dai differenziali secondi occorre quindi che
si consideri la variabile d2 x costante, ed effettivamente questa è una scelta che Leibniz
fa spesso quando tratta i differenziali successivi: in tal caso si ha proprio
d2 y
= f 00 (x)
dx2
che è la notazione che si usa ancora oggi.
4.3. Tangenti. Anche Leibniz, come Newton e altri prima, applica il calcolo differenziale
per risolvere il classico problema delle tangenti: facciamo riferimento alla figura 19.
Leibniz osserva, come del resto abbiamo visto era già ben noto, che approssimativamente
si ha
BD : DE = T A : AB.
Se quindi la curva assegnata ha equazione P (x, y) = 0 allora si ha la relazione
dx : dy = |T A| : y
Figura 19. La tangente T B alla curva OBE nel punto B.
da cui si ricava la sottotangente
(4.3)
|T A| = y
dx
dy
42
LUCA LUSSARDI
che è la perfetta analoga della (3.4) di Newton. La (4.3) è esattamente quello che
scriveremmo oggi: la differenza che c’è tra la (4.3) e il nostro modo di concepire la (4.3)
risiede nel fatto che per noi la scrittura
dx
dy
è una notazione unica, mentre per Leibniz è un vero rapporto algebrico di differenziali.
4.4. L’integrale e le quadrature. In analogia a quanto fatto per il differenziale, Leibniz introduce l’operatore integrale, al quale dedica comunque molto meno spazio, estrapolando un opportuno operatore definito su progressioni discrete delle variabili: va comunque precisato che Leibniz non usa ancora il termine “integrale”, questo nome verrà
dato pochi anni dopo da Jacob Bernoulli. Data la variabile discreta y = {yi }, Leibniz
considera stavolta l’operatore somma
Σi y =
i
X
yj = y1 + y2 + · · · + yi .
j=1
Passando ora alla variabile continua l’operatore Σ diventa l’operatore integrale
Z
y
che stavolta è una variabile infinitamente più grande rispetto alla variabile y. Osserviamo
ora che se y è una variabile discreta allora si ha, per definizione,
X
X
i
i+1
i
X
∆i Σi y = ∆i
yj =
yj −
yj = yi+1
j=1
j=1
j=1
da cui, per estrapolazione alle variabili continue, si avrebbe
Z
d y = y + dy.
Ancora una volta usiamo un discorso di omogeneità degli ordini di infinitesimo/infinito:
affinché il bilancio sia corretto occorre trascurare il termine dy a destra, trovando
Z
(4.4)
d y = y.
La (4.4) rappresenta la versione leibniziana del teorema fondamentale del calcolo integrale, in analogia alla (3.9) di Newton. Tutto è quindi pronto quindi per risolvere anche il
problema della quadratura: l’area Q della regione delimitata dalla variabile y, “funzione”
di x, è data da
Z
Q=
ydx
poiché si ottiene sommando le aree dei rettangoli di base dx e altezza y. Leibniz osserva che Q stessa può essere anche definita come variabile tale che dQ = ydx e quindi
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
43
sottolinea che l’operatore integrale potrebbe essere anche definito semplicemente come
l’inverso dell’operatore d.
4.5. Newton e Leibniz a confronto. Come già osservato in vari punti, Newton non
utilizza mai derivazioni di ordine superiore al primo, sebbene talvolta se ne presentasse la
necessità, come ad esempio nella determinazione dei centri di curvatura; Leibniz invece
introduce anche i differenziali di ordine superiore al primo, anche se non li comprende
completamente, in quanto sembra che questi ultimi abbiano un vero significato solamente
quando si assume costante la progressione dei differenziali primi di una delle variabili.
Le procedure di Newton appaiono molto algoritmiche: lo scienziato inglese ogni volta
fornisce una regola ben precisa che si può applicare a tutti i casi che sta discutendo,
quasi automatica, che permette anche di dimenticarsi della teoria puramente formale
che c’è dietro; il lavoro di Leibniz è invece più astratto e sintetico. Abbiamo osservato
più volte che in Newton talvolta si è costretti, come nel caso della quadratura, a imporre
come unitaria, o in generale nota, la flussione di una delle variabili in gioco: Newton non
è pienamente consapevole del fatto che in realtà le quantità che interessano veramente
non sono le flussioni, bensı̀ i rapporti tra di esse; questo fatto invece è compreso meglio
da Leibniz, anche se il fatto che Newton fissa come unitarie certe flussioni quando gli fa
comodo riflette la scelta delle progressioni costanti di Leibniz. Newton crede fino alla fine
della sua vita che il suo calcolo delle flussioni, accompagnato al metodo delle serie infinite,
sia il fecondo strumento di calcolo che permetterà nel futuro uno sviluppo dell’analisi; la
storia smentirà Newton: infatti, è pur vero che combinando calcolo delle flussioni e serie
infinite si arriva sempre ad una soluzione, ma solo ad una soluzione teorica, perdendo
spesso di vista altri importanti aspetti della problematica. Questo punto sarà il tallone
d’Achille del calcolo newtoniano, e invero sarà il calcolo differenziale di Leibniz a essere
sviluppato da tutti i grandi matematici del continente, a cominciare dai fratelli Bernoulli.
4.6. La disputa sull’invenzione del calcolo. Abbiamo già accennato a questo fatto
discutendo della vita di Newton. Pubblicazioni alla mano, la priorità di invenzione del
calcolo infinitesimale spetterebbe a Leibniz, dal momento che egli è il primo che pubblica
risultati definitivi di calcolo differenziale, nel 1684. Nonostante questo, come abbiamo
già più volte detto, Newton era in possesso del calcolo delle flussioni, che però non pubblica, fin dal 1666. È doveroso precisare sin da subito che oggi viene riconosciuta ad
entrambi la scoperta del calcolo infinitesimale: infatti, data la diversità notevole dei due
approcci, è molto probabile che Newton e Leibniz abbiano sviluppato in modo autonomo il loro calcolo; ricordiamo altresı̀ che Leibniz pubblica svariati articoli sin dal 1675
44
LUCA LUSSARDI
relativi a quello che poi sarebbe divenuto il calcolo differenziale, ma con notazioni via
via da raffinare che diventano definitive solo col Nova Methodus. In realtà, abbiamo già
accennato al fatto che c’è stato un notevole scambio epistolare tra Newton e Leibniz tra
gli anni 1672 e 1676, anche se mai diretto ma mediante i corrispondenti Collins, Barrow
e Oldenburg. In queste lettere Newton espone parecchi suoi risultati che potevano essere
compresi solo con l’uso del calcolo delle flussioni, o comunque solo essendo a conoscenza
del calcolo infinitesimale: in particolare, l’argomento principale delle lettere è il metodo
delle serie infinite, ma Newton cela dietro difficili anagrammi il suo calcolo delle flussioni.
Leibniz viene quindi a conoscenza di questi risultati proprio nel periodo in cui pubblica
i primi tentativi di edificazione del calcolo differenziale, ma è difficile credere che possa
aver tratto delle idee utili a partire dalla vaghezza delle esposizioni di Newton, per cui
appare abbastanza convincente il fatto che Leibniz abbia comunque sviluppato il calcolo
in modo autonomo. Il fatto che ha scatenato la disputa risale al 1704, anno in cui, come appendice dell’Opticks di Newton, appare il Tractatus de quadratura curvarum: una
recensione di questo lavoro, anonima ma notoriamente dovuta a Leibniz, dice infatti che
Newton nel tal lavoro si serve sostanzialmente del metodo differenziale di Leibniz ma
con le notazioni del calcolo delle flussioni. Questa citazione suscita l’ira dei seguaci di
Newton che accusano una prima volta Leibniz di plagio. Nel 1710 il matematico scozzese
John Keill conclude un articolo sulle forze centrifughe dichiarando esplicitamente che si è
avvalso del metodo delle flussioni, scoperto da Newton molti anni prima e poi pubblicato invece da Leibniz con altre notazioni. Leibniz chiede dunque rettifica di una seconda
accusa di plagio cosı̀ pesante, e si rivolge direttamente alla Royal Society di Londra, in
quegli anni presieduta proprio da Newton. La società decide di nominare una commissione che chiarisca definitivamente la priorità sull’invenzione del calcolo; paradossalmente,
il caso viene messo in mano a persone poco competenti in materia, le quali si limitano
a esaminare le lettere scambiate tra Newton e Leibniz e pubblicando, nel 1713, il Commercium epistolicum, ovvero proprio la raccolta commentata dello scambio epistolare tra
Newton e Leibniz. La commissione stabilisce che Leibniz aveva appreso il calcolo dalle
lettere di Newton e se ne era impadronito pubblicandolo a proprio nome e con le proprie
notazioni: Leibniz viene cosı̀ accusato ufficialmente di plagio. Siamo nel 1713 e Leibniz
conclude gli ultimi tre anni della sua vita nella disgrazia a causa dell’accusa ufficiale di
plagio. È curioso osservare che questa disputa sfiora appena quelli che dovrebbero essere
i due veri protagonisti: Newton infatti, da una parte, tace fino a quando i suoi seguaci
cominciano ad accusare Leibniz di plagio, mentre Leibniz non mette mai in discussione la
priorità a Newton per la teoria delle serie infinite, ma rivendica a sé stesso la scoperta del
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
45
calcolo differenziale, calcolo del quale non trova nessuna traccia negli scritti dell’avversario inglese. Nel momento in cui l’accusa di plagio diventa ufficiale, l’Europa si divide
in due: da una parte la comunità inglese prosegue sulla strada delineata da Newton,
il calcolo newtoniano consente, come abbiamo visto, di arrivare sempre ad una soluzione, ma purtroppo una soluzione spesso teorica e non ulteriormente caratterizzabile; nel
continente invece si fa strada la scuola di Leibniz. Gli inglesi non faranno negli anni
successivi sostanziali progressi in analisi, mentre nell’Europa continentale, come esamineremo nella prossima sezione, ci sarà una vera e propria esplosione dell’analisi a partire
dai contributi della famiglia Bernoulli. Leibniz viene quindi vendicato e ricompensato:
egli ci aveva visto più lontano, e il suo approccio, sebbene incompleto per certi versi
rispetto a quello di Newton, dal momento che mancava della teoria delle serie infinite, si
rivelerà l’approccio giusto per lo sviluppo dell’analisi matematica fino ai giorni nostri.
5. I fondamenti del calcolo infinitesimale
5.1. La diffusione del calcolo differenziale in Europa. Nell’immediato periodo
post-Leibniz nell’Europa continentale si assiste ad una rapida diffusione dei metodi del
calcolo differenziale e del calcolo integrale, anche se tra pochi esponenti della comunità
matematica. In particolare, i primi matematici che danno un notevole contributo alla
teoria sono i fratelli Bernoulli, Jacob (1654-1705) e Johann (1667-1748). In questi anni
il calcolo differenziale viene applicato per la risoluzione di moltissimi problemi di origine
fisica, problemi inattaccabili con gli strumenti della matematica classica. Nonostante
questi matematici di grande valore cercano di diffondere il calcolo in Europa, le resistenze sono tante, e sono dovute soprattutto al fatto che i fondamenti del calcolo stesso
sono poco affidabili e imprecisati, rispetto per esempio ai ben noti metodi classici, di
solide fondamenta. Per cercare di vincere queste resistenze, i matematici sostenitori del
nuovo calcolo si dilettavano a proporre spesso problemi inattaccabili classicamente, allo
scopo di mostrare la superiorità del nuovo metodo di calcolo. Va in proposito ricordato
il più celebre problema di questo tipo, proposto nel 1696 proprio da uno dei Bernoulli,
e precisamente da Johann, sugli Acta Eruditorum. Si tratta del celebre problema della
brachistocrona: dati due punti P e Q in un piano verticale, posti ad altezza diversa, si
chiede di determinare la curva che connette P e Q e che minimizza il tempo di discesa
di un grave che la percorre per il solo effetto della forza di gravità. Il problema della
brachistocrona è il problema che ha segnato l’inizio di quel ramo dell’analisi matematica
oggi noto come Calcolo delle Variazioni, ovvero dello studio dei problemi di minimo di
funzionali di tipo integrale. Tra le soluzioni giunte per questo problema arrivano quelle
46
LUCA LUSSARDI
di Leibniz e del fratello Jacob; inoltre arriva anche una soluzione non firmata dall’Inghilterra, ma notoriamente dovuta a Newton: si narra altresı̀ che Newton abbia risolto il
problema della brachistocrona in una sola notte di lavoro. Curiosamente, la soluzione a
questo problema è una curva già nota a quei tempi: si tratta infatti della cicloide, di cui
abbiamo già parlato a proposito della determinazione delle tangenti con metodi riconducibili a considerazioni di tipo cinematico. Ma non è solo la Svizzera, patria dei Bernoulli,
o la Germania ad accogliere le nuove idee della matematica. Il nuovo calcolo arriva anche
in Francia nel 1691, anno in cui Johann Bernoulli, durante un soggiorno a Parigi, insegna
il calcolo infinitesimale al marchese francese Guillame François de l’Hôpital (1661-1704)
il quale nel 1696 pubblica, in anonimato, il trattato Analyse des infiniments petits, prima
esposizione sistematica del calcolo differenziale.
5.2. Il concetto di funzione. Abbiamo più volte sottolineato il fatto che il moderno concetto di funzione non è presente negli studi di calcolo infinitesimale di Newton
e Leibniz, ma ormai siamo arrivati al momento in cui i matematici capiscono che la
nozione di funzione può essere risolutiva per approfondire il problema sui fondamenti
dell’analisi matematica. Il termine funzione appare per la prima volta nel 1673 in un
manoscritto di Leibniz intitolato Methodus tangentium inversa seu de functionibus. Il
concetto di funzione tuttavia fa fatica a prendere piede: ricordiamo che fino a questo
momento gli oggetti di interesse matematico erano le curve, espresse da relazioni del
tipo P (x, y) = 0. Anche i Bernoulli trattano in modo secondario l’idea di funzione, ma
sempre più si comprende in questi anni il fatto che la relazione P (x, y) = 0 sta in realtà
dicendo, in molte situazioni, che l’ordinata y viene calcolata a partire dall’ascissa x applicando ripetutamente varie operazioni. Ecco che quindi uno dei Bernoulli dà la seguente
definizione:
Definizione 5.1. (Johann Bernoulli, 1718) Una funzione di una grandezza variabile
è una quantità composta in una maniera qualunque da questa grandezza variabile e da
costanti.
Si fa quindi spazio una prima nozione di funzione completamente operativa: una
funzione non è ancora una legge qualunque che associa ad ogni valore di x uno ed un
solo valore di y, ma per adesso è solo un modo ben definito per trovare y ogni volta che x
è noto. Questa analiticità del concetto di funzione si ritrova nell’Introductio in analysin
infinitorum di Eulero (1707-1783), il quale dà la seguente definizione.
Definizione 5.2. (Eulero, 1748) Una funzione è un’espressione analitica costruita a
partire dalla variabile x mediante una serie di operazioni.
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
47
Si avverte, in particolare, il legame con il concetto di serie infinita di Newton: infatti,
l’idea di Eulero è che ogni funzione sia espressa da una serie del tipo
axα + bxβ + cxγ + · · ·
dove le potenze sono di qualunque tipo, anche non intere. La concezione euleriana delle
funzioni è ancora lontana dalla definizione moderna, ma c’è anche di più: Eulero chiama infatti continue tutte quelle funzioni che siano descrivibili con un’unica espressione
analitica, mentre invece chiama discontinue tutte le altre; per Eulero dunque la funzione f (x) = |x| è discontinua se considerata definita per ogni valore di x nel continuo
geometrico dell’asse delle ascisse, in quanto risulta, per definizione,
x
se x ≥ 0
|x| =
−x se x < 0
dalla quale si evince che |x| ha due espressioni analitiche diverse a seconda che x sia
positivo o negativo.
5.3. La diffusione del calcolo infinitesimale in Italia. Nonostante l’Italia abbia dato i natali a Cavalieri, la geometria degli indivisibili non viene accettata dai matematici
italiani, troppo ancorati alla geometria greca: va da sé dunque il fatto che anche la geometria di Cartesio e il calcolo infinitesimale non trovano nessuno spazio all’interno della
matematica italiana del XVII secolo. Leibniz stesso fa alcuni tentativi di esportazione
del calcolo differenziale anche nel nostro paese, grazie ad un soggiorno a Roma di sei mesi, ma con scarso successo. Bisogna quindi attendere la generazione successiva a quella
dei matematici italiani già attivi al momento della comparsa del calcolo differenziale. Ed
infatti, nel 1707 avviene il fatto che segna la comparsa del calcolo differenziale anche in
Italia: Jacob Hermann (1678-1733), allievo dei fratelli Bernoulli, prende la cattedra di
matematica all’Università di Padova. Da questo momento la città di Padova diviene il
riferimento per tutti i matematici italiani che vogliono studiare i nuovi metodi del calcolo
infinitesimale. Tuttavia le resistenze sono ancora abbastanza forti, e l’analisi italiana si
limita, in questi anni, allo studio dell’integrazione di equazioni differenziali: ricordiamo
Guido Grandi (1671-1742), Gabriele Manfredi (1681-1761) e Jacopo Riccati (1676-1754).
Nonostante questi pregevoli tentativi, l’analisi italiana resta ad uso di pochi, soprattutto
a causa dell’assenza di buoni testi di riferimento. Una prima svolta in questa direzione
si ha nel 1748, anno in cui appaiono le Istituzioni analitiche di Maria Gaetana Agnesi (1718-1799), il primo matematico di sesso femminile dell’età moderna. Il punto di
forza dell’opera della Agnesi consiste nel fatto che si tratta di un’opera volutamente elementare: essa mira alla preparazione di giovani menti e introduce ai metodi del calcolo
48
LUCA LUSSARDI
infinitesimale. L’opera è composta da due volumi: nel primo volume, Dell’analisi delle
quantità finite, la Agnesi tratta l’algebra elementare e la geometria cartesiana introducendo allo studio analitico delle curve; il secondo volume invece è diviso a sua volta in tre
libri, Del calcolo differenziale, Del calcolo integrale, Del metodo inverso delle tangenti, e,
come gli stessi titoli suggeriscono, si tratta di un’esposizione del calcolo infinitesimale.
Purtroppo, la matematica italiana arresta il proprio sviluppo in questo periodo nel quale
sembra rinascere; dovremo aspettare la metà del secolo successivo per assistere ad un
rifiorire della matematica anche in Italia.
5.4. La critica di Berkeley. Come abbiamo già detto, si ha una rottura tra la matematica del continente e quella inglese, rottura dovuta alla disputa scoppiata tra Newton
e Leibniz. Mentre in praticamente tutta l’Europa continentale il calcolo leibniziano si
diffonde, in Inghilterra si crede ancora che il calcolo delle flussioni, accompagnato dal
metodo delle serie infinite, sia in realtà più adatto ad essere sviluppato. Abbiamo avuto
modo di osservare che è vero che l’uso combinato di flussioni e serie infinite permette di
arrivare sempre ad una soluzione, ma solo, e questo accade in un grandissimo numero
di casi significativi, ad una soluzione estremamente teorica: si arriva infatti ad avere
sviluppi in serie, per altro locali, che non dicono assolutamente nulla sull’eventuale funzione generatrice. Tuttavia, i matematici inglesi perseverano con i metodi di Newton,
e non stupisce che in questi anni ci siano alcune delle scoperte, che ricordiamo ancora
oggi, a proposito degli sviluppi in serie di potenze di funzioni, da parte di analisti inglesi,
come ad esempio Brook Taylor (1685-1731) e Colin Maclaurin (1698-1746), nomi che
ricordiamo ancora oggi a proposito degli sviluppi in serie delle funzioni. I risultati sulle
serie di potenze raggiunti dagli inglesi restano però privi di un vero significato, dal momento che non è ancora assolutamente presente la nozione di convergenza di una serie.
A peggiorare lo stato dell’analisi matematica inglese si presenta sulla scena la più severa
critica ai fondamenti del calcolo infinitesimale, ovvero quella del vescovo irlandese George Berkeley (1685-1753). Nell’anno 1734 infatti Berkeley pubblica un piccolo trattato
intitolato The analist, scritto nella forma di dialogo rivolto ad un “matematico infedele”.
Il vescovo critica molto duramente i fondamenti del calcolo, sia del calcolo delle flussioni
newtoniano sia del calcolo differenziale leibniziano. Ad esempio, per quanto riguarda le
flussioni, Berkeley osserva che il fatto di considerare il rapporto
f (x + ẋo) − f (x)
o
quando o 6= 0, rimaneggiarlo in modo opportuno e alla fine porre o = 0, è un procedimento non valido. Berkeley, tuttavia, è conscio del fatto che il calcolo infinitesimale
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
49
risolve molti problemi in modo relativamente facile ma impossibili da trattare usando
tecniche classiche, e quindi cerca di dare una spiegazione di questo. Secondo lui, infatti,
si tratta di un processo di compensazione degli errori: le varie approssimazioni che si ripetono durante i ragionamenti del calcolo infinitesimale si compensano l’una con l’altra e
il risultato finale è quindi corretto; citando lo stesso Berkeley, si arriva se non alla scienza, almeno alla verità. Di questo stesso parere è l’ingegnere francese Nicolas Léonard
Sadi Carnot (1796-1832) che è uno dei primi scienziati che cerca di rispondere in modo
altrettanto critico alle obiezioni di Berkeley. Le critiche mosse dal vescovo, per inciso
perfettamente legittime, danno un’ulteriore scossa negativa alla matematica inglese, che
quindi, risentendo di ciò, arresta il suo sviluppo; esiste qualche debole tentativo di porre
dei fondamenti rigorosi al calcolo newtoniano, ad esempio Maclaurin nel 1742 pubblica
il Treatise of fluxions nel quale riconduce l’intero calcolo delle flussioni a pura geometria, ma accettando come primitiva la nozione di velocità istantanea, per cui non compie
alcun passo significativo nella direzione della sistemazione definitiva dei fondamenti del
calcolo.
5.5. Lagrange e le derivate. Mentre in Inghilterra lo sviluppo del calcolo infinitesimale e delle applicazioni è sostanzialmente fermo a causa della limitata capacità dei metodi
newtoniani da una parte e delle critiche di Berkeley dall’altra, nel restante continente
europeo le applicazioni del calcolo differenziale e integrale di Leibniz diventano sempre
più numerose e per certi versi spettacolari. Ma pian piano qualcosa comincia ad andare
storto e si avverte più che mai la necessità di dare una teoria fondazionale rigorosa al calcolo infinitesimale. Siamo in pieno illuminismo, e quindi anche vari esponenti del mondo
culturale, oltre agli addetti ai lavori, si preoccupano di dare una risposta a questi grandi
interrogativi. In questi anni appare, per la prima volta, l’idea che la nozione, ancora
imprecisata, di limite, possa essere la chiave: infatti, alla voce “limite” nell’Encyclopédie
di d’Alambert si legge: La teoria dei limiti è la base della vera metafisica del calcolo
differenziale. Nonostante questo fatto sia di per sé corretto, come sappiamo bene oggi,
si tratta solo di un’indicazione, e bisogna aspettare Cauchy prima di registrare il passo
decisivo. Prima dell’arrivo della definizione di limite però vi è un tentativo pregevole
di fondazione del calcolo: il matematico italiano Giuseppe Luigi Lagrange (1736-1813)
mangia la foglia ribaltando il punto di vista di Newton e considera come punto di partenza la teoria degli sviluppi in serie di Taylor, pubblicando, nel 1797, l’opera Théorie des
fonctions analytiques, che raccoglie il più importante contributo pre-Cauchy. Lagrange,
dopo aver mostrato che ogni funzione, localmente, è lo sviluppo della sue serie di Taylor,
50
LUCA LUSSARDI
considera appunto lo sviluppo locale di f attorno a x0 , che scrive come
f (x) = a0 + a1 (x − x0 ) + a2 (x − x0 )2 + · · ·
Chiama dunque derivata prima di f in x0 , e la denota con f 0 (x0 ), il coefficiente di
(x − x0 ), ovvero a1 ; chiama poi derivata seconda di f in x0 , e la denota con f 00 (x0 ), il
coefficiente di (x − x0 )2 , ovvero a2 , e cosı̀ via; infine, chiama f anche funzione primitiva,
rispetto allo sviluppo in serie di potenze dato. Osserva quindi che se h è piccolo allora
f (x0 + h) − f (x0 )
a0 + a1 h + a2 h2 + · · · − a0
=
= a1 + a2 h + · · ·
h
h
da cui f 0 (x0 ) = a1 è proprio ciò che si attribuisce al rapporto
f (x0 + h) − f (x0 )
h
quando h = 0. Cosı̀ facendo, Lagrange recupera quindi il calcolo dei rapporti tra i differenziali di Leibniz, che appunto chiama calcolo delle derivate. Il problema dei fondamenti
è però solo apparentemente risolto, dal momento che, seguendo l’approccio di Lagrange,
tutto si sposta sulla dimostrazione del fatto che ogni funzione si sviluppa localmente in
serie di potenze.
5.6. La definizione di limite. La definizione rigorosa di limite, nel caso delle successioni, appare per la prima volta nel 1659 nell’opera Geometria speciosa di Pietro Mengoli
(1626-1686), quindi addirittura prima delle prime opere di Newton e Leibniz. Tuttavia,
le idee di Mengoli non hanno avuto risonanza, poiché all’epoca il concetto di successione
sembrava molto lontano da quello di funzione, molto più di quanto non sembri a noi,
abituati al linguaggio unificante della teoria degli insiemi. Nel 1817 il matematico cecoslovacco Bernard Bolzano (1781-1848) pubblica la dimostrazione corretta del teorema
degli zeri e per far questo si serve di varie nozioni che introduce in modo rigoroso, come
la nozione di continuità delle funzioni e di convergenza di serie e successioni. Tuttavia, i suoi risultati per vari motivi restano per lo più sconosciuti, e negli stessi anni in
Francia invece l’ingegnere civile Augustin Louis Cauchy (1789-1857) pubblica le note
del suo Cours d’analyse tenuto all’École Polytechnique. In questo corso, Cauchy pone a
fondamento del calcolo infinitesimale la nozione di limite e da questo concetto deduce la
nozione di convergenza di successioni e di serie e di derivata come limite del rapporto incrementale. L’idea viene infatti dalla necessità di rendere rigoroso il concetto di derivata
come limite del rapporto incrementale: dire quindi che la quantità
f (x0 + h) − f (x0 )
−m
h
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
51
deve essere infinitesima per ogni h infinitesimo e non nullo viene rimpiazzata con un
gioco di quantificatori, ovvero
f (x0 + h) − f (x0 )
∀ε > 0 ∃δ > 0 tale che ogni volta che 0 < |h| < δ si ha − m < ε
h
Ecco quindi che da queste intuizioni si può estrarre la definizione di limite. Cauchy
dice che: “Allorché i valori successivamente assunti da una stessa variabile si avvicinano
indefinitamente a un valore fissato, in modo da finire per differirne di poco quanto si
vorrà, quest’ultimo è chiamato limite di tutti gli altri.” Cauchy aggiunge dunque che per
verificare che il limite di una funzione f per x che tende a x0 vale ` bisogna prendere un
numero ε > 0 e da esso si deve sempre trovare un numero δ > 0 tale che per ogni x con
0 < |x − x0 | < δ risulti |f (x) − `| < ε. Si scrive, grazie all’unicità del limite, che vale
sotto opportune ipotesi su x0 ,
` = lim f (x).
x→x0
La definizione di limite è vicina anche a quella di continuità data sempre dallo stesso
Cauchy: per verificare che una funzione f è continua in x0 bisogna prendere un numero
ε > 0 e da esso si deve sempre trovare un numero δ > 0 tale che per ogni x con
|x − x0 | < δ risulti |f (x) − f (x0 )| < ε. Viene ripreso infine il problema della derivata di
Lagrange ponendo, per una data funzione f ,
f (x0 + h) − f (x0 )
.
h→0
h
f 0 (x0 ) = lim
Con l’approccio fondazionale di Cauchy le grandezze infinitesime fanno la loro definitiva
scomparsa dal calcolo infinitesimale classico e la teoria dei limiti è ancora oggi alla base
dell’insegnamento dell’analisi.
5.7. L’integrazione. Se il problema dei fondamenti del calcolo poteva dirsi risolto dalla
teoria dei limiti di Cauchy, e con esso anche il calcolo differenziale, ovvero il calcolo delle
derivate, per il calcolo integrale c’erano ancora parecchie considerazioni da fare. Sempre
Cauchy infatti decide di definire l’integrale che noi oggi chiamiamo definito come l’area
sottesa dal grafico della funzione, e quindi di dimostrare poi la relazione fondamentale
tra integrazione e derivazione. L’idea di Cauchy, per integrare una funzione f continua
nell’intervallo [a, b] è quella di suddividere l’intervallo dato in intervalli
[a, x1 ],
[x1 , x2 ],
...
[xh , b].
Si calcola quindi la somma
S = (x1 − a)f (x0 ) + (x2 − x1 )f (x1 ) + · · · + (b − xh )f (xh )
52
LUCA LUSSARDI
che rappresenta la somma delle aree dei rettangoli di basi xi+1 − xi e altezza rispettiva
f (xi ). Cauchy dimostra dunque l’esistenza di una quantità limite che le somme S raggiungono quando la partizione dell’intervallo [a, b] si infittisce sempre di più, e inoltre
dimostra che tale quantità dipende unicamente dalla forma della funzione f e non dalla
scelta delle partizioni: è da sottolineare il fatto che Cauchy usa pesantemente la continuità di f . Diversamente rispetto alla teoria dei limiti e delle derivate, sull’integrazione
delle funzioni la teoria Cauchy non appare del tutto soddisfacente. Infatti, ad esempio la
mancanza di una teoria rigorosa dei numeri reali fa sı̀ che Cauchy non possa dimostrare
in modo rigoroso l’esistenza dell’integrale come limite. Inoltre, la contuinuità della funzione integranda non sembrerebbe strettamente necessaria, soprattutto in vista di una
delle applicazioni più concrete del calcolo integrale a quel tempo, ovvero la teoria delle
serie trigonometriche, o serie di Fourier: la necessità di poter sviluppare in serie trigonometrica funzioni sempre più generali portava alla necessità di poter integrare funzioni
sempre più generali e meno regolari. Nel 1829 il matematico tedesco Lejeune Dirichlet
(1805-1859) studia l’integrabilità delle funzioni discontinue e arriva, tra le altre cose, a
fornire un esempio di funzione discontinua in ogni punto che secondo lui non poteva in
nessun modo essere integrata, funzione che ancora oggi porta il suo nome: la funzione
di Dirichlet è data da
f (x) :=
1 se x è razionale
0 se x è irrazionale.
Al di là delle questioni di integrabilità, il puro fatto di considerare una funzione come
quella di Dirichlet dà prova dell’ormai piena maturazione del concetto di funzione: da
questo momento in avanti una funzione viene concepita unicamente come una qualunque
applicazione tra insiemi. La necessità di liberarsi dalle discontinuità nella teoria dell’integrazione è alla base degli studi del matematico tedesco Bernhard Riemann (1826-1866).
Egli ribalta il punto di vista di Cauchy. Infatti, prima di tutto introduce una generalizzazione delle somme di Cauchy prendendo in ogni intervallo il valore della funzione
in un punto qualunque dell’intervallo e non necessariamente negli estremi; successivamente, e qui sta la vera innovazione rispetto a Cauchy, usa l’esistenza di un limite delle
somme cosı̀ ridefinite, come definizione di integrale, che è la nozione di integrabilità che
usiamo ancora oggi, ed ecco perché lo chiamiamo integrale di Riemann. L’integrazione
alla Riemann si adatta bene anche a molte funzioni discontinue, ad esempio se il numero di discontinuità è finito o al più numerabile. La funzione di Dirichlet resta non
integrabile anche secondo Riemann: infatti l’estremo superiore delle somme per difetto
vale 0, mentre l’estremo inferiore delle somme per eccesso vale 1; per aggiustare il tiro in
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
53
questa direzione sarà necessaria un’ulteriore generalizzazione del concetto di integrale,
che avverrà solo ai primi del Novecento per opera di Henri Lebesgue (1875-1941).
5.8. I numeri reali: l’aritmetizzazione dell’analisi. La teoria dei limiti di Cauchy
messa a fondamento dell’analisi per funzionare correttamente richiede una definizione
precisa di numero reale: infatti, ad esempio, la nozione stessa di funzione continua fonda
la sua essenza sulla continuità dei numeri reali, o ancora l’integrabilità alla Riemann
richiede delicate proprietà dei numeri reali. Per completare il programma manca quindi una teoria rigorosa dei numeri reali. Osserviamo che il concetto di numero reale è
presente praticamente da sempre, anche i greci sapevano che i numeri reali sono in corrispondenza al continuo geometrico della retta, e dunque le proprietà dei reali, compresa la
completezza, vengono da sempre utilizzate anche se non vi è una teoria rigorosa sotto. Il
matematico che più tra tutti sente l’esigenza di più rigore è il tedesco Karl Weierestrass
(1815-1897), ma prima che possa rendere note le sue ricerche in questa direzione, altri
matematici pubblicano valide teorie dei numeri reali; vediamo di analizzare i due più
importanti tentativi, quello di Cantor e quello di Dedekind. Nel 1872 il tedesco Georg
Cantor (1845-1918) espone, nel lavoro Über die Ausdehnung eines Satzes aus der Theorie
der trigonometrischen Reihen apparso su Mathematische Annalen, una teoria dei numeri
reali che è fondata sull’uso delle cosiddette successioni di Cauchy, e che oggi costituisce
una procedura che chiameremmo completamento dei razionali. L’idea di Cantor è un
ribaltamento del punto di vista di Cauchy. Infatti, nella teoria delle successioni convergenti, Cauchy dice che se una successione di numeri xh è tale per cui per ogni scelta
di ε > 0 esiste un indice ν tale che per ogni h, k > ν si ha |xh − xk | < ε allora la
successione sta convergendo ad un limite, che è ancora un numero. Questo fatto, che è
la completezza dei reali, non è dimostrato, e non può essere dimostrato se non si pone
una definizione rigorosa di numero reale. Cantor decide di prendere questa proprietà di
completezza come definizione di numero reale: i numeri reali sono dunque i limiti delle
successioni di Cauchy. Formalmente quindi Cantor propone di chiamare numero reale
una successione di Cauchy, ma c’è una piccola complicazione però, che non gli sfugge:
infatti, diverse successioni di Cauchy possono dare origine allo stesso numero reale, basti pensare a tutte le successioni convergenti a 0, che identificano il solo reale 0. Per
questo motivo, Cantor identifica tra loro due successioni di Cauchy se la loro differenza
è una successione che converge a 0. Con questa operazione di quoziente si ha un buon
modello per i numeri reali, e si possono dimostrare tutte le proprietà che oggi conosciamo per l’insieme R. La stessa costruzione basata sul completamento dei razionali viene
proposta nello stesso anno dal francese Charles Meray (1835-1911) e anche dal tedesco
54
LUCA LUSSARDI
Eduard Heine (1821-1881). Lo svantaggio principale di questo approccio è che prima di
definire i numeri reali uno ha già bisogno della teoria dei limiti e delle successioni, oltre
ovviamente all’insieme dei numeri razionali. Ben diverso è invece l’approccio del tedesco
Richard Dedekind (1831-1916), il quale, sempre nel 1872, pubblica il lavoro Stetigkeit
und irrationale Zahlen, sempre a proposito di una teoria dei reali. L’idea di Dedekind è
quella di costruire i reali sfruttando alcune proprietà dei razionali. Ad esempio i razionali
soddisfano alla proprietà di sezione: se a è razionale, tutti gli altri razionali si ripartiscono in due classi, l’una fatta da tutti i razionali minori di a e l’altra fatta dai razionali
maggiori di a. Dedekind ha ovviamente in mente il modello del continuo geometrico,
e osserva, a proposito della proprietà di sezione dei razionali, il seguente fatto vero per
la retta: se uno considera due classi di punti sulla retta, A e B, tali che esse formano
una partizione della retta e tali per cui ogni punto di A precede ogni punto di B (A e
B sono dette in tal caso contigue), allora esiste uno ed un solo punto che sta tra le due
classi A e B. Dedekind prende questa proprietà come definizione di numero reale: un
numero reale diventerà l’elemento di separazione tra due classi contigue di razionali. Ad
√
esempio, il numero irrazionale 2 può essere pensato come elemento di separazione tra
le classi contigue
A := {x razionale : x2 < 2},
B := {x razionale : x2 > 2}.
Tecnicamente, quindi, un numero reale per Dedekind è una sezione dei razionali, ovvero
è una coppia di classi contigue (A, B) di razionali. Questo approccio non necessita di
nessuna nozione di analisi o di teoria dei limiti, ma necessita delle proprietà dell’insieme
dei numeri razionali e di proprietà generali di teoria degli insiemi, ed è la costruzione
dei reali che viene tutt’ora utilizzata più frequentemente nell’insegnamento dell’analisi.
Per completare il quadro dunque basta essere in grado di proporre una costruzione dei
razionali, ed è molto semplice costruire l’insieme dei numeri razionali all’interno della
teoria degli insiemi a partire dai numeri naturali; l’ultimo scoglio è quindi la costruzione
dei naturali. Ci sono vari tentativi di costruzione dei numeri naturali. Gottlob Frege
(1848-1925), nel 1884, presenta una teoria insiemistica basata sul concetto di equipotenza: due insiemi sono equipotenti se possono essere messi in corrispondenza uno a uno
tra di loro; il numero di un insieme è quindi l’insieme che ha come elementi tutti gli
insiemi equipotenti ad esso. La definizione di Frege è più profonda di quanto sembri in
quanto include, in un colpo solo, anche la nozione di numero cardinale transfinito, ovvero
la nozione di numero associato ad un insieme infinito, ma non entriamo nel dettaglio di
questo. Anche lo stesso Dedekind, nel 1888, presenta una teoria dei naturali, sempre
APPUNTI DI STORIA DEL CALCOLO INFINITESIMALE
55
fondata, come quella di Frege, sulla teoria degli insiemi. Ricordiamo invece più nel dettaglio la definizione assiomatica di numero naturale proposta dal matematico italiano
Giuseppe Peano (1858-1932), che appare la più semplice e che non necessita della teoria
degli insiemi. Peano dice che:
1) 0 è un numero;
2) il successore di un numero è ancora un numero;
3) 0 non è successore di nessun numero;
4) se due numeri hanno lo stesso successore allora sono uguali;
5) se un insieme A di numeri contiene 0 e il successore di ogni suo elemento allora
A è l’insieme di tutti i numeri.
Le prime quattro proprietà sono molto intuitive. L’ultima proprietà è altrettanto intuitiva e formalizza, in un certo senso, la nozione primitiva del contare; inoltre, essa sta alla
base del principio di induzione, tecnica dimostrativa di enorme utilità in matematica.
Più in basso di cosı̀ non possiamo andare, abbiamo toccato le fondamenta della matematica; a questo punto possiamo solo chiederci: quanto queste fondamenta sono solide?
Purtroppo dobbiamo rassegnarci al fatto che non possiamo garantire la solidità delle fondamenta della matematica: questo fatto può essere formalizzato e dimostrato, ed è stato
fatto nel 1931 da un giovane matematico austriaco di nome Kurt Gödel (1906-1978), ma
questa è un’altra storia.
Riferimenti bibliografici
[1] Carl B. Boyer, Storia della matematica, Mondadori, Milano, 1990.
[2] H. J. M. Bos, Differentials, higher-order differentials and the derivative in the Leibnizian calculus,
Archive for history of exact sciences 14 (1974) 1-90.
[3] Elementi di Euclide, a cura di A. Frajese e L. Maccioni, UTET, Torino, 1970.
[4] E. Giusti, Piccola storia del calcolo infinitesimale dall’antichità al novecento, Ist. Editoriali e
Poligrafici Pisa-Roma, 2007.
[5] M. Kline, Storia del pensiero matematico I e II, Einaudi Editore,Torino, 1999.
[6] I. Newton, The method of fluxions and infinite series: with its application to the geometry of curvelines, printed by Henry Woodfall, London, 1736.
Scaricare