UNIVERSITA’ DEGLI STUDI
DI CASSINO
FACOLTA’ DI INGEGNERIA
DOTTORATO DI RICERCA IN INGEGNERIA CIVILE E MECCANICA
XIX CICLO
CARATTERIZZAZIONE
MICROSTRUTTURALE E
COMPORTAMENTO MECCANICO
DELLE GHISE SFEROIDALI
CANDIDATA
Ornella Di Bartolomeo
a.a. 2005-2006
UNIVERSITA’ DEGLI STUDI
DI CASSINO
FACOLTA’ DI INGEGNERIA
DOTTORATO DI RICERCA IN INGEGNERIA CIVILE E MECCANICA
XIX CICLO
CARATTERIZZAZIONE
MICROSTRUTTURALE E
COMPORTAMENTO MECCANICO
DELLE GHISE SFEROIDALI
COORDINATORE
TUTORE
Chiar.mo Prof.
Chiar.mo Prof.
Elio Sacco
Francesco Iacoviello
CANDIDATA
Ornella Di Bartolomeo
a.a. 2005-2006
Indice
INDICE
Pag. 1
INDICE
INTRODUZIONE
5
CAPITOLO I: LE GHISE
7
1.1 Definizione
7
1.2 Proprietà
8
1.3 Struttura della ghisa
9
1.3.1 Velocità di raffreddamento
10
1.3.2 Influenza degli elementi di lega
11
1.4 Caratterizzazione della microstruttura delle ghise
12
1.5 Classificazione delle ghise
12
1.6 Ghisa sferoidale: generalità
12
1.6.1 Influenza degli elementi di lega
13
1.6.2 Formazione degli sferoidi
14
1.6.3 Confronto tra una ghisa grigia ed una ghisa sferoidale
14
1.7 Produzione e controlli metallurgici
15
1.8 Distribuzione e forma della grafite
15
1.9 Proprietà meccaniche
16
1.9.1 Effetti sulle proprietà meccaniche
16
1.9.2 Effetto della composizione
16
1.9.3 Effetto della forma della grafite: resistenza a fatica
17
1.9.4 Trattamenti termici
17
1.9.5 Applicazione ed impieghi
20
CAPITOLO II: LE GHISE SFEROIDALI
21
2.1 Introduzione
21
2.2 Ghise sferoidali e principali proprietà meccaniche
21
2.3 Processo produttivo in fonderia
27
2.3.1 Fusione della ghisa sferoidale di base e trattamento del
28
metallo
2.3.1.1 Fusione in cubilotto
29
2.3.1.2 Fusione elettrica
31
1
Indice
2.3.1.3 Preparazione del metallo di base
35
2.3.1.4 Trattamento sferoidizzante: metodi
37
2.3.2 Tecniche di formatura
40
2.3.2.1 La formatura transitoria
42
2.3.2.2 La formatura con forme permanenti
45
2.3.3 La fase di colata
45
2.3.4 Trattamenti di finitura
46
2.3.5 Trattamenti termici
46
2.4 Controllo di qualità della ghisa sferoidale
CAPITOLO III: RETI NEURALI
47
48
3.1 Introduzione
48
3.2 Modello di neurone
49
3.3 Architettura rete neurale
50
3.4 Diversi tipi di apprendimento
51
3.4.1 Apprendimento supervisionato
51
3.4.2 Apprendimento non supervisionato
51
3.5 Architettura delle diverse reti neurali
3.5.1 Reti MLP
52
52
3.5.1.2 Algoritmo di addestramento back-propagation
53
3.5.1.3 Varianti dell’algoritmo di back-propagation
57
3.5.1.3.1 Aggiunta del termine “momentum”
58
3.5.1.3.2 Learning rate variabile
58
3.5.1.3.3 Resilient Backpropagation
59
3.5.1.3.4 Algoritmo di Newton
60
3.5.1.3.5 Metodo Montecarlo
61
3.5.1.3.6 Intervento sul solo training-set
61
3.5.2 Reti Radial Basis Function (RBF)
61
3.5.3 Reti Self-Organizing
63
3.5.3.1 Reti Competitive (CN)
63
3.5.3.2 Reti SOM (Self-Organizing Maps)
65
3.5.3 Reti Learning Vector Quantization (LVQ)
66
3.5.3.1 Regola di addestramento LVQ
67
3.5.3.2 Reti Ricorrenti (RN = Recurrent Network)
67
3.5.3.4 Reti di Hopfield
69
2
Indice
3.5.4 Reti ricorrenti per modellare i sistemi dinamici
3.6 Commenti
CAPITOLO IV: RESISTENZA A FATICA
69
75
79
4.1 Nozioni introduttive
79
4.2 Criteri di progettazione e valori caratteristici utilizzati nella fatica
82
4.3 Diagramma di Wohler
83
4.4 Introduzione alla meccanica della frattura
85
4.4.1 Cenni di meccanica della frattura
86
4.4.2 Effetto di chiusura
87
4.4.3 Modelli di propagazione di cricche di fatica
88
4.4.4 Modello di Paris
89
4.4.5 Meccanica della frattura e fenomeni di fatica
90
4.4.6 Apparato di prova
91
CAPITOLO V: MATERIALI: GHISE SFEROIDALI
94
INVESTIGATE
5.1 Composizioni chimiche e trattamenti termici
94
5.2 Microstrutture
96
CAPITOLO VI: METODOLOGIE SPERIMENTALI
6.1 Determinazione dei parametri morfologici di interesse nelle ghise
100
100
sferoidali
6.1.1 Analisi metallografia: applicazioni reti neurali
101
6.1.2 Reti neurali: struttura locale dell’immagine e alfabeto di
103
addestramento della rete.
6.1.3 Analisi metallografia: segmentazione mediante contorni
105
attivi.
6.1.3.1 Procedura sperimentale
108
6.2 Avanzamento della cricca di fatica in aria: procedura di prova
110
6.3 Analisi delle superfici di frattura
110
6.3.1 Metodi di analisi al SEM e al LOM
110
6.3.2 Ricostruzione tridimensionale dei profili di frattura
111
6.4 Procedura di osservazione al SEM di prove di trazione
117
6.5 Appendice
120
CAPITOLO VII: RISULTATI ED ANALISI
7.1 Impiego delle reti neurali e della segmentazione mediante
122
122
3
Indice
contorni attivi nell’identificazione dei parametri morfologici di
interesse nelle ghise sferoidali
7.1.1 Applicazione della procedura di segmentazione mediante
125
contorni attivi: risultati
7.2 Risultati di fatica ottenuti per una ghisa sferoidale ferritica
129
7.3 Risultati di fatica ottenuti per una ghisa sferoidale perlitica
132
7.4 Risultati di fatica ottenuti per una ghisa sferoidale ferrito-
134
perlitica
7.5 Risultati di fatica ottenuti per una ghisa sferoidale a matrice
137
prevalentemente ferritica
7.6 Risultati di fatica ottenuti per una ghisa sferoidale austemperata
139
7.7 L’influenza del rapporto di carico sulla resistenza alla
142
propagazione della cricca di fatica in una ghisa sferoidale ferritoperlitica mediante sperimentazione e reti neurali artificiali
7.8 Ricostruzione tridimensionale dei profili di frattura
147
7.9 Risultati delle prove di trazione effettuate con osservazione al
151
SEM: in ghisa sferoidale a matrice completamente ferritica
7.10 Risultati delle prove di trazione effettuate con osservazione al
154
SEM: in ghisa sferoidale a matrice perlitica
7.11 Risultati delle prove di trazione effettuate con osservazione al
156
SEM: in ghisa sferoidale a matrice ferrito-perlitica
7.12 Risultati delle prove di trazione effettuate con osservazione al
158
SEM: in ghisa sferoidale a matrice prevalentemente ferritica
161
CAPITOLO VIII: CONFRONTI E COMMENTI
8.1 Confronto del comportamento a fatica delle ghise sferoidali
161
ferritiche, perlitiche e ferrito-perlitiche
8.2
Confronto
del
comportamento
a
fatica
delle
ghise
166
sferoidaliaustemperate ripetto alle ghise sferoidali ferritiche,
perlitiche e ferrito-perlitiche
8.3 Confronto dei meccanismi di danneggiamento nelle ghise
168
sferoidali investigate
CONCLUSIONI
173
BIBLIOGRAFIA
176
4
Introduzione
INTRODUZIONE
Le ghise sferoidali sono le leghe ferrose più utilizzate dopo gli acciai. Queste costituiscono
una famiglia di ghise piuttosto versatile caratterizzata da un ampio intervallo di proprietà
meccaniche che possono essere ottenute mediante il controllo della microstruttura e degli
sferoidi. Il controllo della microstruttura della matrice è ottenuto mediante sia il controllo
della composizione chimica che del processo di produzione. Le ghise sferoidali presentano
caratteristiche meccaniche simili all’acciaio con il vantaggio di avere una bassa
temperatura di fusione e una colabilità tale da consentire la realizzazione di getti anche di
forma molto complicata e spessore sottile. In funzione della microstruttura si può ottenere
un’ampia varietà delle combinazioni delle possibili proprietà meccaniche.
Per quanto riguarda il comportamento alla frattura, la caratteristica fondamentale di queste
ghise è la presenza della grafite sotto forma di noduli che, grazie alla loro morfologia,
possono agire come “crack arresters”. Ovviamente tale risultato viene ottenuto solo nel
caso di una buona nodularizzazione della grafite medesima. Una sua degenerazione può
altresì implicare un indebolimento della matrice metallica, con gli elementi di grafite che
non agiscono più come “crack arresters”, ma, piuttosto, possono generare cricche
secondarie. Le caratteristiche geometriche dei noduli sono analizzate in campo industriale
secondo la normativa ASTM o normative analoghe: le procedure proposte essenzialmente
consistono in un’analisi semi-quantitativa della dimensione, grado di nodularizzazione e
distribuzione degli sferoidi di grafite, in cui l’esperienza e la sensibilità dell’operatore
svolgono un ruolo importante. Attualmente, grazie al supporto di tecniche software di
elaborazione delle immagini, sono state implementate diverse procedure in grado di
ottenere da una determinata immagine numerosi parametri, di effettuare misurazioni e di
eseguire calcoli statistici su un gran numero di osservazioni, applicando le procedure
proprie della metallografia quantitativa, che impongono comunque per ogni immagine una
segmentazione a soglia che seppur molto semplice ed efficiente, è tuttavia euristica nella
scelta dei valori e richiede comunque l’intervento dell’esperto per l’analisi d’immagine.
In questo lavoro di tesi, sono state considerate delle ghise con matrice ferritica, ferritoperlitica e perlitica, ampiamente utilizzate in campo automobilistico e nella autotrazione
(supporti motore, alberi motore, corpi pompa, ecc.). Inoltre sono state considerate due
ghise sferoidali austemperate (ADI), caratterizzate da valori di resistenza a trazione,
5
Introduzione
duttilità, tenacità, resistenza a fatica ed all’usura molto più elevate rispetto alle altre ghise
sferoidali.
Gli obiettivi di questo lavoro di tesi sono stati:
•
l’individuazione automatica degli elementi metallografici, utili alla valutazione
delle caratteristiche meccaniche delle ghise sferoidali in esame attraverso l’utilizzo
delle reti neurali per la determinazione dei parametri morfologici di interesse e
l’utilizzo di più sofisticate tecniche di segmentazione (mediante contorni attivi) in
grado di quantificare la distribuzione della matrice metallica delle ghise sferoidali
(percentuale di ferrite e perlite);
• l’analisi dell’influenza della degenerazione degli sferoidi di grafite sul meccanismo
di propagazione delle cricche di fatica nelle quattro differenti famiglie di ghise
sferoidali;
• l’analisi dell’influenza della microstruttura delle differenti ghise sferoidali sulla
resistenza alla propagazione delle cricche di fatica confrontando i meccanismi di
danneggiamento, anche attraverso analisi tridimensionali dei profili di frattura ed
analisi SEM.
6
Le ghise
CAPITOLO I
LE GHISE
1.1 DEFINIZIONE
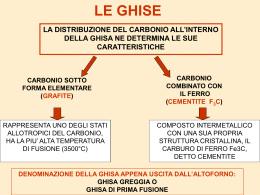
Le strutture di equilibrio delle leghe ferro-carbonio, come l’acciaio e la ghisa, sono
rappresentate dal diagramma di stato Fe-C. Dal momento che in condizioni normali il ferro
e il carbonio sono combinati sotto forma di cementite (Fe3C), il diagramma utilizzato è il
diagramma ferro-cementite (figura 1). La cementite è caratterizzata da un contenuto
stechiometrico del carbonio pari al 6.69% in peso.
T(°C)
1538°
δ
1500
δ+L
1495°
Liquido
δ+γ
1400
1394°
1300
L+γ
L+Fe3C
1200
1154°
γ
1100
1148°
1000
γ+Fe3C
912°
900
800
α+γ
700
α
738°
727°
α+ Fe3C
600
0
0.77% 1
2.11%
3
4.30%
5
C(%)
6.69
Figura 1: Diagrammi Fe-Fe3C(____) ed Fe-C(_ _ _ _).
7
Le ghise
Nel caso di una lega binaria Fe-C, si definisce ghisa una lega con un tenore di carbonio
superiore allo 2.06% (limite di solubilità del C nell’austenite), ovvero con una percentuale
di carbonio maggiore di quella di solubilizzazione nell’austenite. Queste solidificano
formando una matrice ledeburitica, ossia un eutettico formato da austenite e cementite
oppure grafite.
1.2 PROPRIETÀ
Le proprietà meccaniche e fisiche delle ghise sono notevolmente influenzate oltre che dalla
natura delle fasi presenti, anche dalla loro distribuzione e, quindi, dalla microstruttura di
queste leghe [1]. Una di queste fasi è la cementite che tende a decomporsi più o meno
velocemente in funzione della temperatura secondo la reazione:
Fe3C → 3Fe + C ( gr )
(1)
ove il carbonio è sotto forma di grafite .
Per temperature non elevate, la reazione avviene però così lentamente che la cementite
permane tale per ampi intervalli di tempo. Per temperature più elevate, in presenza
soprattutto di particolari elementi di lega (per esempio il Si), si può riscontrare una rapida
grafitizzazione dei carburi di Fe; se la grafitizzazione è completa, il diagramma
d’equilibrio ferro-grafite rappresenta la struttura delle leghe Fe-C. Proprio questo ultimo
diagramma, come è mostrato in figura 1, presenta un andamento analogo a quello Fe-Fe3C
ma con le linee leggermente spostate verso l’alto (tratteggiate). In figura 1 si può ancora
osservare che tanto più elevata è la percentuale di carbonio, tanto più bassa è la
temperatura di fusione, fino ad arrivare ad un tenore di carbonio del 4.30%, in
corrispondenza del quale la temperatura coincide con quella eutettica (1148°C). La bassa
temperatura di fusione infatti rende le ghise molto adatte alla realizzazione di getti. Una
elevata percentuale di carbonio rende le ghise molto dure e fragili e quindi poco adatte ad
essere lavorate per deformazione plastica sia a freddo che a caldo. La lavorabilità alle
macchine utensili dei materiali contenenti grafite è superiore a quella dell’acciaio di eguale
durezza, poiché la presenza di grafite agisce da lubrificante durante il taglio e rende più
facile la frantumazione dei trucioli. E’ possibile osservare inoltre che:
•
al diminuire della temperatura (T<1148°C) la solubilità del carbonio nel ferro
γ diminuisce.
8
Le ghise
•
Al di sotto di 727°C si ha la trasformazione allotropica del ferro γ in ferro α, in cui il
carbonio è praticamente insolubile. Ciò implica la trasformazione dell’austenite (alla
temperatura eutettoidica) in perlite, la quale risulta costituita dal 12% di cementite e
dall’88% di ferrite.
•
A seconda della velocità di raffreddamento durante la trasformazione eutettica , si può
ottenere cementite o grafite:
Liq (4.30%) = A (2.11% C) + Cementite (6.67%C)
oppure
Liq (4.26%) = A (2.08%C) + Grafite.
È importante specificare che dalla reazione espressa dalla (1):
•
La cementite formata a T>1148°C con C>4.3% si dissocia facilmente.
•
La cementite formata a T=1148°C con 2.11%< C < 4.33% si dissocia più lentamente.
•
La cementite formata a 727°C< T < 1148°C con C<2.11% si decompone facilmente.
La presenza comunque di alcuni elementi di lega quali lo zolfo, il silicio, ed il
manganese può modificare la velocità di decomposizione della cementite (il Si, ad
esempio, aumenta la velocità di grafitizzazione).
1.3 STRUTTURA DELLA GHISA
La struttura di una ghisa con un determinato tenore di carbonio può essere modificata:
1. aumentando la velocità di raffreddamento
2. aggiungendo elementi di lega.
1.3.1
Velocità di raffreddamento
L’effetto della velocità di raffreddamento sulla microstruttura delle ghise è illustrato nel
diagramma di figura 2. Aumentando la velocità di raffreddamento diminuisce la tendenza
alla formazione di grafite rispetto a quello di cementite. Ciò consente di modificare la
microstruttura della ghisa e di definire quindi le differenti tipologie quali ghisa bianca,
trotata, grigia etc.
9
Le ghise
Figura 2: Variazione della microstruttura delle ghise in funzione della velocità di
raffreddamento.
1.3.2
Influenza degli elementi di lega
Gli elementi alliganti modificano notevolmente le proprietà di tutte le leghe Fe-C. Essi
agiscono sul tenore di carbonio corrispondente all’eutettico ed, inoltre, influenzano in
modo vario e complesso le varie fasi di solidificazione.
Gli elementi alliganti agiscono sulla microstruttura delle ghise provocando i seguenti
effetti:
•
grafitizzante
•
carburigeno
•
stabilizzante di ferrite, perlite etc
Esaminiamo quali sono questi elementi e i loro specifici effetti.
IL Silicio è l’elemento che influisce maggiormente sulla microstruttura delle ghise. Infatti
dal digramma di figura 3 si può notare come la sua presenza restringe il campo di
esistenza del ferro γ favorendo la formazione del ferro α.
Ιn particolare il Silicio abbassa fortemente la %C dell’eutettico, in accordo con la
relazione:
%C = 4.3 −
Si
3 .2
(2)
All’aumentare del tenore di Silicio diminuisce la quantità di carbonio all’eutettoide,
svolgendo inoltre una forte azione grafitizzante.
10
Le ghise
Ιl Nichel ha anch’esso un effetto grafitizzante, ma è circa quattro volte inferiore a quello
del Silicio.
T(°C)
1500
δ+L
δ
1400
Liquido
1300
L+γ
L+Fe3C
1200
γ
1100
1000
γ+Fe3C
900
α+γ
γ+α+ Fe3C
800
α
700
α+ Fe3C
600
0
1
2
3
4 C(%)
Figura 3: Diagramma Fe-C-Si,con il 2% di Si.
L’Alluminio, il Titanio, lo Zirconio agiscono in modo simile al Silicio.
Il Rame ha durante la solidificazione è un debole effetto grafitizzante e promuove la
formazione di perlite. Il Cromo invece favorisce notevolmente la formazione di carburi e
quindi la sua aggiunta riduce la possibilità di grafitizzazione. Analogo comportamento è
riscontrabile con il Vanadio,il Molibdeno, il Manganese ed il Tungsteno. Il Tellurio
agisce efficacemente da stabilizzante dei carburi; la sua influenza è elevata, tanto che è
sufficiente una piccola quantità percentuale per avere ghisa bianca in luogo di quella
grigia. Un miglioramento notevole delle proprietà della ghisa si osserva con l’aggiunta di
elementi di lega quali Nichel, Cromo e Molibdeno, soprattutto per quello che concerne
una maggiore uniformità e compattezza dei getti, nonché per l’affinamento del grano
cristallino: ciò comporta una maggiore facilità nell’ottenere per tutti gli spessori una
matrice perlitica cui corrispondono migliori proprietà. L’aggiunta di elementi speciali può
rendere inoltre la ghisa :
•
resistente al calore o alla corrosione
•
in grado di sopportare meglio condizioni di usura.
11
Le ghise
1.4 CARATTERIZZAZIONE DELLA MICROSTRUTTURA DELLE GHISE
Sostanzialmente per migliorare le proprietà delle ghise si utilizzano procedimenti atti a
modificare la forma della grafite; nel passare dalla forma “lamellare” a quella “sferoidale”
si ottengono miglioramenti della resistenza della matrice metallica a causa di una notevole
diminuzione dell’effetto di intaglio. La normativa europea [2 relativa alla designazione
della microstruttura della ghisa classifica la grafite presente nelle leghe Fe-C, qualora siano
analizzate al microscopio ottico, secondo:
a) la sua forma
b) la sua distribuzione
c) le sue dimensioni.
1.5 CLASSIFICAZIONE DELLE GHISE
Le ghise possono essere classificate secondo diversi criteri in base all’aspetto della frattura,
ai costituenti microstrutturali o a particolari proprietà; tuttavia il metodo tradizionalmente
utilizzato prevede la suddivisione in cinque gruppi :
-
ghise grigie: dal colore della superficie di frattura poiché presentano grafite libera;
-
ghise bianche: con aspetto della frattura che si differenzia dal precedente in quanto
il carbonio è combinato;
-
ghise malleabili : dalla capacità di deformarsi permanentemente;
-
ghise legata: dalla caratteristica di avere una elevata percentuale degli elementi di
lega per consentire una buona resistenza alla corrosione e al calore;
-
ghise sferoidali: nelle quali la grafite libera è presente sotto forma di noduli.
1.6 GHISE SFEROIDALI: GENERALITÀ
Le ghise sferoidali sono le leghe ferrose più utilizzate dopo la ghisa grigia e l’acciaio. In
esse, attraverso opportuni procedimenti, si ha la formazione di grafite non più in forma
lamellare ma in forma sferoidale (Figura 4a).
Eliminato così il problema dovuto all’indebolimento delle lamelle di grafite (effetto di
intaglio), la ghisa sferoidale presenta un notevole miglioramento di tutte le proprietà
12
Le ghise
meccaniche con l’aggiunta di una: la duttilità. Essa ha pertanto le stesse caratteristiche
meccaniche dell’acciaio, col vantaggio di avere una temperatura di fusione bassa ed una
buona fluidità. Di conseguenza può essere impiegata anche per la produzione di getti
forma complicata.
Di seguito verranno analizzati la composizione chimica ed il meccanismo di formazione
degli sferoidi; per quanto riguarda le proprietà meccaniche e gli impieghi si rimanda più
dettagliatamente al capitolo successivo.
Figura 4a): Immagine al microscopio ottico Figura 4b: Possibili fasi nella crescita di
uno sferoide di grafite secondo la teoria del
di una ghisa sferoidale ferrito-perlitica
“limite di fase”.
(Ingrandimento 100X).
A: gas
B: whisker di grafite
C: fuso
D: austenite
1.6.1 Influenza degli elementi di lega
Possiamo distinguere tre diversi tipi di elementi:
a) Elementi abituali
La composizione chimica di una ghisa sferoidale è:
C=3.3 – 3.8%
Si=1.8 – 2.8%
Mn≤0.6%
P≤0.10%
S≤0.03% .
Lo Zolfo è presente in quantità minima a causa del suo potere antigrafitizzante: una
desolforazione spinta è necessaria anche perché lo zolfo combinandosi con il magnesio
potrebbe neutralizzare l’effetto sferoidizzante del manganese.
b) Elementi da aggiungere per fini specifici
La sferoidizzazione delle particelle di grafite durante il processo di solidificazione
della ghisa è da imputare all’aggiunta in un processo a “step” detto nodulizzazione di una
13
Le ghise
piccola ma definita quantità di Magnesio (0.04 – 0.08%) o Cerio (0.005%) o Calcio,
Litio, Azoto, Bario (anche se questi hanno una minore importanza commerciale).
Nella maggior parte delle applicazioni commerciali sono aggiunti sia il Magnesio, come
principale agente nodulizzante, che il Cerio (in quantità di 20 ppm) principalmente per
ridurre la sensibilità del Magnesio alla presenza del Piombo, Bismuto, Antimonio ,
Titanio e di tutti gli elementi che inibiscono la formazione di grafite sferoidale e che sono
perciò annoverati come elementi nocivi.
1.6.2
Formazione degli sferoidi
Il meccanismo di formazione degli sferoidi non risulta ancora ben chiaro.
Elliot [10] ipotizza che durante la solidificazione avvenga (Figura 4b):
•
formazione di sferoidi di grafite e loro crescita a contatto con il liquido
sottoraffreddato, che nucleano per presenza di bolle gas;
•
formazione di un guscio di austenite attorno agli sferoidi ed ulteriore crescita in
fase solida.
La crescita dello sferoide circondato dall’austenite risulta notevolmente rallentata dalla
bassa diffusività del Carbonio nell’austenite. Malgrado ciò, più della metà della grafite
dello sferoide ha origine a seguito della diffusione del C attraverso l’austenite.
1.6.3
Confronto tra una ghisa sferoidale ed una ghisa grigia
La ghisa contenente grafite nodulare è molto più resistente e più duttile di una ghisa grigia
di simile composizione. Queste proprietà consentono di utilizzare la lega in molte
applicazioni strutturali, non richiedendo prolungati trattamenti termici.
Tipicamente la composizione chimica di una ghisa sferoidale è simile ad una ghisa grigia,
come riportatato nella tabella 1.
Le ghise grigie e le ghise sferoidali sono prodotte utilizzando le medesime materie prime,
ma quelle usate per la ghisa sferoidale sono in genere più pure. Come la ghisa grigia,
quella sferoidale può essere fusa all’arco elettrico o in forni ad induzione; allo stato liquido
presenta una fluidità tale da consentire il suo utilizzo in getti con forme anche molto
complicate.
14
Le ghise
Tabella 1: Composizione % degli elementi tipici per una ghisa grigia e una ghisa
sferoidale.
Elemento
C
Mn
Si
Cr
Ni
Mo
Cu
P
S
Ce
Mg
Ghisa grigia
3,25 − 3,50
0,60 − 0,90
1,80 − 2,30
0,05 − 0,20
0,05 − 0,20
0,05 − 0,10
0,15 − 0,40
0,12 max
0,15 max
−
−
Ghisa sferoidale
3,50 − 3,80
0,30 − 1,00
2,00 − 2,80
0,08 max
0,05 − 0,20
0,01 − 0,10
0,15 − 0,40
0,08 max
0,02 max
0,005 − 0,020
0,03 − 0,05
Il suo ritiro in fase solidificazione assomiglia a quello della ghisa grigia, sebbene la
presenza di noduli di grafite durante il raffreddamento provochi un incremento di volume,
richiedendo pertanto un discreto numero di materozze.
1.7
PRODUZIONE E CONTROLLI METALLURGICI
Nella produzione di ghisa sferoidale sono richiesti molti controlli chimici, meccanici e
metallurgici in modo che siano soddisfatte le specifiche richieste.
Prima di tutto è necessario selezionare nel ciclo di fonderia una materia prima
relativamente pura in modo che non siano presenti elementi residui indesiderati. Carbonio,
Manganese, Silicio, Fosforo e Zolfo devono essere presenti nel tenore richiesto.
Magnesio e Cerio [4], e, certi altri elementi devono essere controllati in modo da ottenere
la forma della grafite desiderata; elementi come Antimonio, Piombo, Titanio, Tellurio,
Bismuto e Zirconio interferiscono con il processo di nodulizzazione e devono essere
eliminati o presenti in tenori comunque molto bassi. Gli elementi quali Cromo, Nickel,
Molibdeno, Vanadio e Boro agiscono come formatori di Carbonio, come stabilizzatori di
perlite o promotori di ferrite, in modo simile a come agiscono nella ghisa grigia [1].
1.8 DISTRIBUZIONE E FORMA DELLA GRAFITE
Ci sono tre tipi di agenti nodulizzanti ognuno dei quali contiene Magnesio : magnesio non
legato, nodulizzatori base nickel e nodulizzatori magnesio ferro-silicio.
15
Le ghise
Il magnesio non legato può essere introdotto nei pori del coke metallurgico oppure, come
generalmente accade, nella lega appena fusa. In quest’ultimo caso si utilizza il metodo del
“contenitore in pressione” (che contiene già la lega fusa), in cui è posto magnesio non
legato; successivamente il contenitore viene ruotato e il Magnesio scorre sulla lega. In
ogni caso esso viene vaporizzato ed i suoi vapori attraversano la lega favorendo la
formazione di grafite sferoidale.
I nodulizzatori base nickel e i ferro-silicei sono aggiunti dopo gli elementi di lega per
promuovere la formazione di un elevato numero di noduli e di microstutture preferenziali.
Quindi agendo esclusivamente sulla forma e distribuzione degli sferoidi si ottiene una
ghisa con buone proprietà senza sottoporla a trattamenti di tipo termico.
1.9 PROPRIETÀ MECCANICHE
La norma UNI EN 1563 [5] definisce la classificazione del getto di ghisa sferoidale in base
alle caratteristiche meccaniche del materiale .
Queste ultime possono essere valutate su provette lavorate di macchina a partire da :
1. Saggi colati separatamente;
2. Saggi costituenti appendici rispetto al getto o al sistema di riempimento della
forma;
3. Saggi ottenuti dal getto.
1.9.1 Effetti sulle proprietà meccaniche
E’ possibile osservare in quale maniera la composizione chimica, la forma della grafite, la
microstruttura ed i trattamenti termici influenzino le proprietà meccaniche dei getti di ghisa
sferoidali (detta anche ghisa duttile).
1.9.2
Effetto della composizione
Gli elementi di maggiore importanza sono quelli che influenzano la struttura della matrice
e la distribuzione dei noduli di grafite.
Il Carbonio caratterizza la fluidità della lega fusa ed influenza la dimensione e il numero
delle particelle di grafite che si formano durante la solidificazione.
16
Le ghise
Il Silicio è un potente agente grafitizzante. Un aumento del suo tenore rispetto al limite,
causa la formazione di strutture che progressivamente presentano un ammontare maggiore
di ferrite. Ciò comporta un aumento della duttilità, ma nel contempo una riduzione della
durezza. Inoltre il Silicio provoca un innalzamento della temperatura media di transizione
della ghisa duttile in corrispondenza di tutti i trattamenti termici. Per esempio, si passa per
una ghisa sferoidale normalizzata da temperatura ambiente ad una temperatura pari a 65°C.
Tra gli elementi di lega comunemente utilizzati per migliorare le proprietà meccaniche
della ghisa sferoidale bisogna ricordare il Manganese, che oltre a stabilizzare la perlite,
aumenta la resistenza a trazione (ma riduce la duttilità ).
Il Nickel è usato per incrementare la resistenza a trazione del getto attraverso la
formazione di perlite fine.
Il Rame può essere usato sia come stabilizzatore di perlite, sia per aumentare la resistenza.
Il Molibdeno può essere aggiunto per stabilizzare la struttura a temperature elevate (
buona resistenza a temperature intorno ai 650°C.
1.9.3
Effetto della forma della grafite: resistenza a fatica
La conversione della grafite dalla forma lamellare a quella nodulare comporta un notevole
miglioramento delle proprietà meccaniche. Infatti:
•
la sezione resistente a parità di volume è maggiore;
•
la sensibilità all’effetto di intaglio è minore che nelle ghise lamellari.
La resistenza a fatica della ghisa sferoidale è superiore a quella di qualsiasi altra ghisa
lamellare sia per l’elevato rapporto di durata (rapporto tra il limite di fatica e il carico di
rottura), che per la bassa sensibilità all’intaglio paragonabile a quella degli acciai (figura
5).
In figura 5 si può osservare il comportamento di due ghise a diversa struttura:
all’aumentare della resistenza a trazione, che provoca un incremento del limite di fatica,
diminuisce il rapporto di durata [6].
17
Le ghise
rapporto
di durata
0.55
matrice ferritica
(dopo ricottura)
0.50
matrice perlitica
(grezzo di colata)
0.45
0.40
0.35
resistenza alla
300 400 500 600 700 800 trazione ⎛⎜ N ⎞⎟
2
⎝ mm ⎠
Figura 5: Relazione tra il rapporto di durata e la resistenza alla trazione per le ghise
sferoidali con la struttura della matrice da completamente ferritica (dopo la ricottura) a
completamente perlitica.
1.9.4
Trattamenti termici
La maggior parte delle ghise sferoidali è utilizzata allo stato grezzo di fusione o tutt’al più
dopo aver subito un trattamento termico di distensione che non ne modifica la struttura [3].
Tuttavia per ottenere caratteristiche meccaniche particolari, esiste una gamma di
trattamenti termici specifici che sono :
•
Trattamento di stabilizzazione: serve ad eliminare le tensioni interne residue che
nascono durante la fase di raffreddamento. Si porta il pezzo a circa 600°C, con velocità
di salita di 500 – 600 °C/h e lo si fa permanere a tale temperatura per 2 – 6 ore. Poi si
fa raffreddare con velocità di 25 – 50 °C/h fino ad arrivare a 100 – 250°C. Si può
vedere dalla figura 6 come la temperatura di stabilizzazione influenzi l’eliminazione
delle sollecitazioni residue alte (A) e basse (B).
•
Trattamento di ricottura: tale trattamento rende i getti capaci di deformazioni plastiche
superiori alle altre ghise. Quindi se si vuole un pezzo che non abbia come priorità la
duttilità ma la resilienza e l’allungamento, allora lo si sottopone a ricottura in modo
che dalla matrice austenitica si abbia una matrice ferritica. Si riscalda il pezzo fino a
920°C e lo si fa permanere a tale temperatura per 2 o 3 ore in modo da avere la
decomposizione della cementite. Poi si raffredda fino a 800°C con velocità di 100°C/h,
successivamente si continua a raffreddare lentamente con velocità di 20°C/h per
impedire la formazione di perlite fino a 650°C.Poi si può di nuovo raffreddare
velocemente. Il ciclo termico è riportato in figura 7.
18
Le ghise
Sollecitazioni
Residue (%)
100
80
B
60
A
40
20
0
300
temperatura di
400 500 600 700 800 stabilizzazione (°C)
Figura 6: Variazione delle sollecitazioni residue.
Temperatura (°C)
1000
800
600
400
200
0
durata (h)
0
4
8
12
16
Figura 7 : Ciclo di ricottura per ottenere ghisa sferoidale a matrice ferritica.
Il fatto di operare a temperature così elevate può portare ad alcuni inconvenienti come
decarburazioni superficiali, deformazioni e rigonfiamenti dei getti; per evitare ciò, in
particolare nei casi in cui non vi sia elevata quantità di cementite libera, vengono eseguiti
trattamenti temici a temperature inferiori.
• Trattamento di normalizzazione: è utilizzato al fine di ottenere una struttura perlitica
dalla matrice austenitica, la quale assicura al getto un’ottima resistenza meccanica. Si
riscalda il pezzo fino a 900°C e si permane a tale temperatura per 2 – 5 ore. Il
raffreddamento viene effettuato prima in forno, poi a partire da temperature di 800°C
circa, si estrae il pezzo e lo si lascia raffreddare in aria calma. In seguito a tale
19
Le ghise
trattamento possono nascere tensioni interne, allora si può effettuare un rinvenimento a
temperature comprese tra i 450 – 650 °C.
• Trattamento di tempra e di rinvenimento: con il primo trattamento si ottiene una
microstruttura finale martensitica, che rende il getto molto duro e nel contempo fragile.
Il pezzo viene portato alla temperatura di 850 – 900 °C e la permanenza è fissata in
base alla struttura del materiale di partenza e allo spessore del getto; segue poi un
raffreddamento in olio. Di norma, dopo la tempra, è necessario un rinvenimento con il
duplice scopo di eliminare le tensioni interne e di aumentare la capacità di
deformazione, oltre che di riportare la durezza a valori desiderati.
• Tempra superficiale: permette di trattare termicamente solo determinate zone
superficiali.
I metodi di applicazione sono due:
1. Tempra superficiale alla fiamma : una o più zone da indurire sono riscaldate sopra
il punto di austenitizzazione per mezzo di una fiamma o più fiamme per un tempo
molto breve e poi temprate con olio o acqua .
2. Tempra superficiale ad induzione : il mezzo riscaldante è costituito da una o più
bobine di forma adeguata e variamente disposte, attraverso cui passa corrente
elettrica .
In entrambi i procedimenti è molto importante eliminare le tensioni interne
presenti da processi precedenti in quanto potrebbero innescarsi cricche. E’
consuetudine perciò applicare un trattamento di rinvenimento a 200°C dopo quello
superficiale.
1.9.5
Applicazioni ed impieghi
La ghisa sferoidale ha un rapporto di carbonio tale da rendere la sua composizione
prossima a quella eutettica. Ciò, come già detto, implica una bassa temperatura di fusione,
e, poiché ha come proprietà la buona colabilità può essere utilizzata per stampi sottili e
complicati.
Essa viene utilizzata per la realizzazione di alberi motori, ingranaggi, in quanto con il
trattamento di tempra le superfici di contatto sono rese molto dure e resistenti all’usura.
Inoltre è possibile effettuare processi di saldatura tramite cannello ossiacetilenico, elettrodi
e brasatura. E’ anche possibile saldarla con altri materiali come acciai al Carbonio,
inossidabili e leghe al Nickel.
20
Le ghise sferoidali
CAPITOLO II
LE GHISE SFEROIDALI
2.1 INTRODUZIONE
Nel corso della prima metà del novecento, il tentativo di ottenere un materiale capace di
unire la colabilità delle ghise e la tenacità degli acciai fu coronato da un successo, almeno
parziale, con le ghise malleabili. Queste sono ottenute mediante un lungo e costoso
processo di ricottura di ghise bianche, durante il quale la cementite presente si decompone
in grafite che precipita sotto forma di aggregati differenti, in funzione della modalità di
raffreddamento dalla temperatura di ricottura. L’elevato costo della procedura, e le
oggettive difficoltà nell’ottenere pezzi di grandi dimensioni limitano però l’applicabilità di
questa procedura. Nel 1948, H.Morrogh della British Cast Iron Research Association
(BCIRA) annunciò alla American Fondrymen Society Convention la formazione di grafite
in forma sferoidale all’interno di una ghisa grigia ipereutettica, mediante l’aggiunta di
piccole quantità di cerio. Nello stesso anno, l’International Nickel Company annunciò il
raggiungimento del medesimo risultato mediante l’utilizzo di magnesio come
sferoidizzante (brevetto del 1949). Le ghise sferoidali (solitamente indicate in inglese con
il termine “ductile iron”) hanno avuto uno sviluppo continuo negli ultimi decenni, grazie
ad un miglioramento del controllo del processo di sferoidizzazione ed un’ottimizzazione
delle microstrutture, mediante sia un controllo degli elementi di lega aggiunti, sia una
ottimizzazione del trattamento termico.
2.2 GHISE SFEROIDALI E PRINCIPALI PROPRIETÀ MECCANICHE
Possono essere ottenute ghise sferoidali caratterizzate da matrici anche notevolmente
diverse (figura 8): ferritica (caratterizzate da una buona duttilità e da una resistenza alle
21
Le ghise sferoidali
sollecitazioni di trazione comparabile con quella di un acciaio non legato a basso tenore di
carbonio); perlitica (caratterizzate da una elevata resistenza a trazione, ma da duttilità e
resilenza non elevate); ferrito-perlitica (sono le ghise sferoidali più largamente utilizzate,
con una resistenza a trazione intermedia rispetto a quella offerta dalle ghise completamente
ferritiche e completamente perlitiche); martensitica (con una resistenza a trazione elevata,
ma con livelli inferiori di duttilità e resilienza); bainitica (con una durezza intermedia);
austenitica (caratterizzate da una resistenza alla corrosione migliorata e da una buona
resistenza a trazione); austemperata (caratterizzate da una resistenza a trazione quasi
doppia rispetto alle ghise sferoidali a matrice perlitica, con un elevato valore
dell’allungamento e della tenacità). Le caratteristiche di queste ghise, spesso indicate con
l’acronimo ADI (Austempered Ductile Iron), sono legate alla particolare microstruttura
ottenuta con il trattamento denominato “austempering”, a seguito del quale la
microstruttura è costituita da austenite trasformata (arricchita in carbonio), austenite
residua e ferrite aciculare (possono essere anche presenti quantità inferiori di martensite e
di carburi).
Ferritica
Rm = 414 MPa
Ferrito-perlitica
Rm = 552 MPa
Perlitica
Martensitica
Martensite rinvenuta
ADI
Rm = 690 MPa (con austenite res.) Rm = 793 MPa
Rm = 1050 MPa
ADI
Rm = 1600 MPa
Austenitica
Rm = 310 MPa
Figura 8: Ghise sferoidali: differenti microstrutture e resistenza a trazione (nota: le foto
corrispondono a differenti ingrandimenti) [1].
L’influenza della microstruttura sul comportamento meccanico è riportata nella figura 9,
per ciò che riguarda la resistenza a trazione, e nella figura 10, nel caso della resistenza alla
propagazione della cricca di fatica. In ogni caso, al di là delle caratteristiche relative alle
differenti microstrutture, la peculiarità di queste ghise è data certamente dalla morfologia
degli elementi di grafite. Caratterizzate da una forma approssimativamente sferica, le
particelle di grafite agiscono come “crack arresters”, con una conseguente incremento della
tenacità, della duttilità e della resistenza alla propagazione della cricca di fatica Tale
risultato è comunque ottenuto solo nel caso di una buona “nodulizzazione” delle particelle
di grafite. Questa viene ottenuta mediante l’aggiunta di magnesio, magnesio+calcio, terre
rare, oppure magnesio+terre rare.
22
Le ghise sferoidali
Figura 9: Resistenza a trazione per acciai, ghise grigie e ghise sferoidali ferritiche e
perlitiche [1].
-6
da/dN
[m/ciclo]
10
R = 0,1
100% F
50% F + 50% P
100% P
ADI
R = 0,75
100% F
50% F + 50% P
100% P
ADI
-7
10
-8
10
-9
10
10
-10
3
10
1/2
ΔK [MPa m ]
40
Figura 10: Influenza della microstruttura e del rapporto di carico sulla resistenza alla
propagazione delle cricche di fatica [1,8].
Sebbene il processo di nodulizzazione sia comunemente ritenuto eterogeneo, il substrato di
nucleazione non è stato ancora chiaramente identificato. E’ stato infatti proposto che la
nucleazione abbia luogo sia sulle differenti inclusioni che possono formarsi (MnS, CaS,
SrS, MgO etc. [4,9]), oppure in corrispondenza di bolle gassose [10]. Dopo la nucleazione,
i noduli di grafite si accrescono grazie alla diffusione degli atomi di carbonio attraverso il
23
Le ghise sferoidali
guscio di austenite. A seguito di tale processo, si possono ottenere differenti morfologie, le
cui principali sono quelle riportate nella figura 11. A partire da noduli con la superficie
liscia (Figura 11a) oppure rugosa (Figura 11b), si arriva a differenti forme di grafite
degenerata (ad esempio, figura 11c). Più ci si allontana dalla forma perfettamente sferica
dell’elemento di grafite, peggiori sono le proprietà meccaniche, in particolare la tenacità e
la resistenza alla propagazione della cricca di fatica. La forma degli elementi di grafite può
essere controllata sia direttamente (mediante misure metallografiche) che indirettamente
(ad esempio mediante ultrasuoni).
Figura 11: Differenti forme degli elementi di grafite nelle ghise sferoidali [7].
Per una completa caratterizzazione di una ghisa sferoidale è quindi necessario controllare
sia la microstruttura che la morfologia degli sferoidi.
Il metodo diretto, implica una preparazione metallografica, seguita da una osservazione al
microscopio ottico, effettuata solitamente ad un ingrandimento pari a 100x. Nel caso sia
necessario effettuare una analisi della microstruttura, si effettua un attacco chimico (ad
esempio utilizzando una soluzione Nital 1 o 3 per qualche secondo), prima
dell’osservazione al microscopio. Nel caso di una preparazione effettuata con l’obiettivo di
analizzare gli elementi di grafite, non è necessario effettuare un attacco chimico della
superficie lucidata. Il risultato tipico è quello riportato nella figura 12.
Dall’esempio riportato nella figura 12, si può osservare che la densità delle particelle
(definita come numero di particelle per unità di superficie, n/mm2) è piuttosto elevata.
Considerando che le proprietà macroscopiche della ghisa in oggetto dipendono dalle
condizioni microscopiche degli elementi di grafite, ne consegue che è necessario
caratterizzare un elevato numero di particelle, effettuando un numero di osservazioni
elevato.
24
Le ghise sferoidali
Figura 12: Osservazione al microscopio ottico di una ghisa sferoidale (senza attacco
chimico).
Questa analisi è solitamente effettuata in modo semiquantitativo, utilizzando un parametro
di “nodularità” che descrive la percentuale degli elementi di grafite che sono descritti in
maniera accettabile da una sfera, e valutando la dimensione dei noduli e la loro
distribuzione [14-16]. E’ necessario sottolineare che le immagini ottenute mediante la
preparazione metallografica possono presentare “artefatti” (quali ad esempio graffi ed
ombre) che rendono problematica una identificazione automatica o anche solo
semiautomatica del livello di nodularità. Tale identificazione viene solitamente effettuata
in maniera semiquantitativa, fondamentalmente basandosi sull’esperienza e l’abilità
dell’operatore. Alcuni software sono commercialmente disponibili, ma le prestazioni
offerte non sono assolutamente soddisfacenti, vista la loro usuale derivazione dal campo
biologico [25].
Problematiche simili sono offerte dall’analisi della microstruttura del campione, che, oltre
ai problemi relativi alla presenza degli “artefatti” relativi ad una non perfetta procedura di
lucidatura, presenta anche tutti i problemi relativi alle procedure di attacco chimico, con la
possibile ulteriore formazione di “artefatti” estranei alla microstruttura, ed alla
identificazione delle fasi e dei costituenti strutturali. La quantificazione automatica delle
frazioni volumetriche delle fasi e dei costituenti strutturali presenti, sebbene in linea di
principio possibile, purtroppo non è supportata da software dedicati soddisfacenti. Ne
consegue che gli operatori solitamente procedono ad una quantificazione delle frazioni
volumetriche manuale oppure semiquantitativa, ovvero basata su una valutazione
soggettiva dell’immagine.
25
Le ghise sferoidali
Per quanto riguarda la caratterizzazione delle proprietà meccaniche, è necessario
sottolineare che, a fronte di un continuo incremento del numero e dell’importanza delle
applicazioni relative alle numerose tipologie di ghise sferoidali disponibili in commercio, e
nonostante il fatto che la sua quota di mercato stia praticamente sopravanzando quello
della ghisa grigia (figura 13, fonte Rete Italiana per la Diffusione dell’Innovazione e il
Trasferimento Tecnologico alle Imprese, RIDITT), e nonostante una intensa attività di
ricerca relativa alle identificazione delle proprietà meccaniche [17-20], corrosionistiche e
tecnologiche delle ghise sferoidali, non sono ad oggi disponibili dei modelli costitutivi in
grado di considerare l’influenza della microstruttura sul comportamento meccanico,
neppure per la classe di ghise sferoidali di più agevole caratterizzazione, ovvero quella
relativa alle matrici ferrito-perlitiche [34].
Figura 13: Produzione dei tre tipi di ghisa nei principali paesi europei (anno 2000, fonte
RIDITT).
Ad esempio, nella figura 10, in cui si riporta l’influenza della microstruttura e del rapporto
di carico sulla resistenza alla propagazione della cricca di fatica, si osserva che, mentre per
bassi rapporti di carico l’influenza della microstruttura sulla resistenza alla propagazione
della cricca di fatica è praticamente trascurabile per qualunque valore di ΔK, nel caso dei
rapporti di carico elevati si ha una influenza trascurabile solo in corrispondenza dei valori
prossimi alla soglia (ΔKth), mentre nel caso dello stadio II (zona di Paris) e dello stadio III
(rottura di schianto) della propagazione si ha una più marcata influenza della
microstruttura, con la ghisa ferrito-perlitica (50% F + 50% P) che presenta un
comportamento decisamente più interessante rispetto alle ghisa completamente ferritica
oppure completamente perlitica. In taluni casi, sia nel caso delle ghise sferoidali che di
26
Le ghise sferoidali
altre leghe, si è tentato di quantificare e simulare l’influenza della microstruttura e delle
modalità di sollecitazione sulla resistenza meccanica mediante l’impiego delle reti neurali
artificiali [21-24]. Queste infatti ben si prestano alla simulazione di fenomeni in cui
l’influenza dei parametri non è lineare. I risultati, interessanti e promettenti, consentono di
prendere in considerazione le reti neurali artificiali come strumento per una completa
simulazione dell’influenza della microstruttura e delle modalità di sollecitazione sul
comportamento meccanico delle ghise sferoidali a matrice ferrito-perlitica.
2.3 PROCESSO PRODUTTIVO IN FONDERIA.
Il processo produttivo attuato nelle fonderie può essere ricondotto alle seguenti fasi:
1. Fusione e trattamento del metallo
2. Formatura e preparazione anime
3. Colata del metallo nella forma e raffreddamento.
4. Distaffatura (estrazione dei getti dalla forma)
5. Finitura del getto.
Per ogni lega prodotta, risulta rilevante il sistema di realizzazione della forma, ed il sistema
di colata del metallo all’interno di essa. Tradizionalmente le fonderie si suddividono in
fonderie con forma a perdere (ciascuna forma è utilizzata una sola volta, e viene distrutta al
momento dell’estrazione del getto) o con forme permanenti (la medesima forma viene
utilizzata per produrre innumerevoli quantità di getti); la formatura con forme permanenti
viene molto utilizzata nel campo dei metalli non ferrosi (in particolare per la produzione di
getti di alluminio), associate a tecniche di colata a pressione (alta pressione o bassa
pressione). Nelle fonderie di metalli ferrosi, fatta eccezione per la realizzazione di getti
centrifugati, la formatura viene realizzata in forme a perdere; in alcuni casi possono essere
realizzati getti utilizzando sistemi di formatura misti (parte della forma a perdere e parte
permanente). Il tipo di lega da produrre ed il tipo di forma utilizzata, condizionano le
caratteristiche degli impianti e la scelta dei processi utilizzati. Le scelte tecnico–
impiantistiche sono, inoltre, condizionate dal tipo di mercato al quale la fonderia si rivolge,
in particolare rispetto alle dimensioni dei getti da produrre e le relative serie.
Il processo produttivo di una fonderia può essere rappresentato dal seguente schema:
27
Le ghise sferoidali
Figura 14: Schema a blocchi del processo fusorio in fonderia
2.3.1 Fusione della ghisa sferoidale di base e trattamento del metallo
Tutti i forni destinati a fondere ghisa o acciaio possono essere impiegati anche per la
fusione della ghisa di base. Dal punto di vista economico e qualitativo, la miglior
produzione viene realizzata attraverso l’impiego abbinato di cubilotti e forni ad induzione,
ma ciò è evidentemente realizzabile soltanto da parte di aziende con grandi volumi di
28
Le ghise sferoidali
produzione. Per restare di interesse generale, la discussione della fusione abbinata verrà da
quella relativa alla fusione semplice in cubilotti e forni ad induzione.
2.3.1.1 Fusione in cubilotto
La quantità maggiore di ghisa sferoidale di base viene fusa, direttamente o per successivo
abbinamento in cubilotti. Oltre ad essere il più comune e sperimentato dispositivo di
fusione per la ghisa, il cubilotto offre anche taluni vantaggi di qualità e di economia di
fusione. Le ghise sferoidali base fuse in cubilotti, sono adatte ad ottenere strutture esenti da
carburi. Naturalmente tale condizione dipende dalla qualità dei controlli metallurgici.
Tuttavia tale processo produttivo è entrato ormai in disuso, diventando sempre più
imponenti gli imperativi di protezione ambientale. In generale si può affermare che le
fonderie a cubilotto possono essere distinte in due gruppi: a) quelle che hanno ereditato gli
impianti dal passato e non possiedono controlli adeguati e pertanto sono in via di disarmo
passando alla fusione elettrica; b) quelle che realizzando anche produzioni combinate,
giustificate da volumi di produzione elevati, esercitano i controlli necessari, il cui costo
viene recuperato dai risparmi realizzati. L’impianto di fusione a cubilotto in generale è un
impianto di tipo semicontinuo, cilindrico ed asse verticale (figura 15), e si presta alla
produzione di un solo tipo di ghisa (a vantaggio dei volumi di produzione) e può essere
distinto a seconda del tipo di rivestimento e alla composizione della scoria.
Nel processo fusorio la carica, scendendo lungo il cubilotto, viene riscaldata controcorrente
dai gas di combustione del coke e giunge a completa fusione nella zona antistante gli ugelli
di immissione del vento. La ghisa liquida si raccoglie nella parte più bassa del forno, detta
crogiuolo che si separano dalle scorie che galleggiano e vengono eliminate attraverso
l’apposito scarico.
La composizione della scoria esercita una profonda influenza sulla qualità della ghisa ed
anche sulle condizioni operative. La scoria viene definita, a seconda del suo contenuto in
CaO, MgO e SiO2, come acida o basica. La basicità della scoria è espressa dal rapporto:
CaO (%) + MgO (%)
SiO2 (%)
(3)
Se tale rapporto è maggiore di uno la scoria è basica; se è minore di uno è acida. Alcuni
esempi sono riportati in Tabella 2.
29
Le ghise sferoidali
Figura 15: Forno a cubilotto per produzione ghisa.
Tabella 2: Composizione di scorie dei cubilotti
Tipo di scoria
SiO2(%)
CaO(%)
MgO(%)
Basicità
Acida
45
35
1
0,8
Basica
30
40
20
2,0
Esistono ovviamente, oltre alla composizione della scoria, molti altri parametri che
influenzano la produzione della ghisa sferoidale base, come il rapporto coke/carica, altezza
del letto di fusione, disegno del cubilotto, carica metallica, temperatura di spillatura,
ecc.(figura 16). In generale le ghise fuse in cubilotto presentano un certo tenore di Zolfo,
che diventa elevato nel caso di scoria acida (0,08-0,12%). In operazioni di piccolo volume
tale tenore viene abbattuto dalla lega sferoidizzante durante il trattamento di
sferoidizzazione. In caso di elevati volumi di produzione, è preferibile per l’economicità
della fusione realizzare una desolforazione prima della colata in staffa.
Per suddetti limiti di carattere tecnico oltre che per limiti di carattere ambientale, si è
verificato un sostanziale regresso del loro impiego soprattutto perché dal punto di vista
della qualità dei getti non si riescono a garantire getti dimensionalmente piccoli e sottili
esenti da galleggiamento di grafite o grafite esplosa, a causa degli elevati tenori di
Carbonio e Zolfo (figura 17).
30
Le ghise sferoidali
Figura 16: Forno a cubilotto con recupero dei gas di scarico.
Figura 17: Esempio di grafite esplosa.
2.3.1.2 Fusione elettrica
La fusione elettrica è semplice, pulita ed affidabile. Essa offre inoltre la massima
flessibilità nella fusione di ghise di diverso tipo.
I forni ad arco elettrico sono molto meno diffusi di quelli ad induzione. Il loro
funzionamento, di tipo discontinuo, può fornire una produzione continua solo se vengono
usate simultaneamente diverse unità. Ciò significa un grande volume produttivo, ed in
questo caso la fusione primaria fornisce ghisa sferoidale di base con qualità metallurgiche
superiori.
31
Le ghise sferoidali
I forni elettrici ad induzione sono i più comuni (figura 18, figura 19), sia per il
funzionamento semplice nelle fonderie di piccole dimensioni, sia come apparecchiature in
abbinamento. Di solito, il tipo a crogiuolo viene usato per la fusione primaria ed il tipo a
canale per la fusione abbinata. Gli apparecchi ad alta frequenza sono solo strumenti di
laboratorio.
Nella produzione commerciale vengono usate frequenze basse (leghe di rame ed alluminio)
e medie (per leghe ferrose) comprese tra 50 e 180 Hz. Tanto più è bassa la frequenza, tanto
migliore è l’azione di agitazione e quindi l’omogenizzazione. I forni elettrici ad induzione
sfruttano il principio dell’induzione elettromagnetica e cioè sviluppano nella carica
metallica delle correnti indotte da un campo magnetico che per effetto joule scaldano il
metallo. Sebbene i forni a crogiuolo possono funzionare in modo discontinuo, ciò
comporta una scarsa economia ed una scarsa utilizzazione del forno stesso. È certamente
consigliabile mantenere un fondo di metallo fuso (o piede di bagno) di almeno il 25% della
capacità totale durante tutta la vita utile del rivestimento refrattario. Per avere condizioni
metallurgiche ottimali si richiederebbe un crogiuolo ancora più pieno, dove sol il 20%
della capacità totale venisse spillato ed immediatamente rimpiazzato con carica solida
Figura 18: Forno ad induzione a bassa frequenza con nucleo magnetico
32
Le ghise sferoidali
Figura 19: Forno ad induzione a media frequenza senza nucleo magnetico, circondato da
spira induttrice.
È da notare che la capacità e la potenza dei forni debbono essere scelte indipendentemente.
La migliore capacità si ha al quintuplo del peso di ogni singola spillatura (trattamento). La
potenza necessaria viene determinata dalla velocità di fusione richiesta.
Figura 20: Forno fusorio a media frequenza per la produzione di ghisa.
33
Le ghise sferoidali
Figura 21: Sistema di caricamento annesso al forno fusorio
Figura 22: Spillata di metallo fuso da forno fusorio
34
Le ghise sferoidali
2.3.1.3 Preparazione del metallo base
La qualità metallurgica della ghisa sferoidale base liquida è influenzata da tre variabili:
a) sequenza di caricamento, (figura 23) b) massima temperatura del forno e temperatura di
stazionamento, c) contenuto in silicio della ghisa base.
a) Per quanto concerne la sequenza di caricamento, le condizioni ottimali si ottengono
mediante spillatura ed immediata ricarica, in modo da ridurre al minimo la
formazione di carburi di fusione.
b) Si afferma talvolta ancora che, sovrariscaldando la ghisa ad alta temperatura, si
beneficia erroneamente della omogeneizzazione del fuso e della dissoluzione della
rimanente grafite lamellare che può essere stata caricata. In realtà la grafite
lamellare si scioglie quasi istantaneamente nel ferro liquido, cioè viene espulsa e
resta intrappolata nella scoria. Ciò rende ovviamente imperativo agitare il bagno
metallico nella fase di carburazione e non surriscaldare il bagno prima della
spillata.
c) Dal punto di vista teorico il silicio è il solo elemento in un processo fusorio, in
grado di trattenere l’ossigeno nel fuso. Allo stesso tempo, l’ossido di silicio diventa
instabile al crescere della temperatura ed al di sopra della temperatura di
solidificazione l’ossido di SiO2 viene attaccato dal Carbonio con formazione di CO
gassoso fungendo da luoghi di nucleazione per la grafite.
a)
b)
Figura 23: Sistema di caricamento forni fusori. a) Schema di caricamento, b) Caricamento
ghisa in pani mediante magnete
La carica metallica media per una ghisa base consiste di:
35
Le ghise sferoidali
•
Ghisa in pani o ghisa d’altoforno con quota di carica pari al 15-20%: fornisce,
seppur relativamente costosa, essendo una pura lega ferro-carbonio, un
contributo significativo al controllo della composizione chimica in quanto
trasmette alla ghisa base favorevoli proprietà ereditarie come assenza di carburi,
buona risposta all’inoculazione, bassi tenori di Zolfo (0.05-0.20%).
•
Rottame di acciaio con quota di carica pari al 40-50%: è un importante
componente della carica della ghisa sferoidale. È comunque importante dal
punto di vista metallurgico il reperimento di acciaio di “buona qualità” sia dal
punto di vista della composizione chimica sia dal punto di vista della forma
fisica. Più significativamente, quegli elementi che favoriscono la formazione di
carburi (Cr, B, V, Mo) e quelli che interferiscono con la forma della grafite (S,
Pb, Zn) dovrebbero essere presenti in quantità piccole e costanti. Tuttavia
previsioni future fanno ritenere che la qualità del rottame di acciaio, per quanto
concerne la produzione di ghisa sferoidale, tenderà a peggiorare poiché nel
tentativo di aumentare il rapporto resistenza/peso crescerà l’apporto degli
elementi di lega. Inoltre nel tentativo di migliorare la resistenza alla corrosione
tenderà ad aumentare l’apporto dello Zinco soprattutto sui componenti
automobilistici. La forma fisica comprende dimensioni e superficie specifica
(esempio ritagli di lamiere zincate e sottili)
•
Ritorni di ghisa sferoidale con quota di carica di circa il 20-30%: è pratica
comune nel processo produttivo di ghisa sferoidale tenere separati e ritorni di
ghisa sferoidale (canali di colata, materozze ecc.) e successivamente riutilizzarli
nella preparazione della carica metallica. A tutti gli effetti tali rottami
presentano lo stesso costo dei getti commerciabili: il rottame infatti viene fuso
dalla stessa miscela di ghisa d’altoforno e rottame di acciaio, trattato, inoculato
e colato entro la stessa forma del getto da produrre. Per questo motivo tale
materiale, avente in genere bassi tenori di Zolfo, di Manganese e di Fosforo,
presenta caratteristiche metallurgiche confrontabili alla ghisa in pani e deve
essere utilizzato con parsimonia, anche per tenere sotto controllo eventuali
effetti di ereditarietà.
•
Ferro-leghe e carburo di silicio con quota necessaria al raggiungimento dei
tenori di Carbonio e Silicio previsti dalla composizione chimica.
36
Le ghise sferoidali
2.3.1.4 Trattamento sferoidizzante: metodi
La sferoidizzazione delle particelle di grafite durante il processo di solidificazione della
ghisa è da imputare all’aggiunta in un processo a “step” detto nodulizzazione di una piccola
ma definita quantità di Magnesio (0.04 – 0.08%) o Cerio (0.005%) o Calcio, Litio, Azoto,
Bario (anche se questi hanno una minore importanza commerciale).
Nella maggior parte delle applicazioni commerciali sia il Cerio che il Magnesio sono
aggiunti – il secondo come principale agente nodulizzante il primo (in quantità di 20 ppm)
principalmente per ridurre la sensibilità del Magnesio alla presenza del Piombo, Bismuto,
Antimonio , Titanio e di tutti quelli che inibiscono la formazione di grafite sferoidale.
Di seguito si riportano i metodi di sferoidizzazione più ampiamente utilizzati.
•
Metodo di trasferimento in siviere: la lega madre di Magnesio viene posta sul
fondo della siviera di trattamento vuota ed aperta con o senza pozzetto e la
ghisa base liquida viene versata su di essa. Si ritiene che il getto della ghisa
liquida debba essere diretto lontano dalla in cui è collocata la lega, ed il
riempimento deve avvenire il più velocemente possibile. Una variante di tale
metodo è il cosiddetto “sandwich”, in cui la lega madre viene ricoperta con
piccoli pezzi di acciaio (circa il 2% della peso della ghisa da trattare) in modo
quindi da ritardare l’inizio della reazione ed abbassare localmente la
temperatura del liquido attorno alla lega di Mg (Figura 24).
•
Metodo a siviera coperta o tundish cover: la presenza di coperchio ad imbuto
limita ovviamente, rispetto al metodo di cui sopra, la velocità di riempimento e
la violenza della reazione, consentendo in parte il recupero del Magnesio
diminuendo la formazione di MgO (Figura 25).
•
Metodo mediante convertitore Fisher: questo processo utilizza magnesio
metallico puro di basso costo in una camera di reazione che è separata dal
liquido quando il convertitore è orizzontale. Quando il convertitore viene
ruotato in posizione verticale, la ghisa reagisce con il magnesio e viene trattata.
Una ulteriore rotazione del convertitore lo riporta nella condizione di scarico.
•
Metodo di sferoidizzazione in forma o “in-mold”: il trattamento avviene
all’interno della forma e l’agente sferoidizzante (MgFeSi) è posto in una
camera di reazione che fa parte del dispositivo di colata (Figura 26). I
vantaggi di tale metodo sono l’eccellente recupero del Magnesio e l’assenza di
inquinanti nell’aria. Gli svantaggi sono un minor rendimento di colata e la
37
Le ghise sferoidali
necessità di accertare microscopicamente l’avvenuta sferoidizzazione, poiché
non risulta possibile verificare mediante analisi chimica l’effettivo tenore di
Mg residuo nel metallo liquido.
•
Metodo
di
sferoidizzazione
mediante
filo
animato:
esso
consiste
nell’alimentare delle barrette, o un filo di Magnesio metallico attraverso
un’apertura vicino al fondo della siviera, entro il liquido. Questo metodo per
introdurre nel fondo della siviera la ferrolega ed il Mg. In figura 27 e 28 sono
mostrati rispettivamente un tipico schema di installazione dei dispositivi filo
animato ed una bobina contenente Mg dal diametro di circa 13 mm per un peso
complessivo di 2 tonnellate circa . Sicuramente tale metodo risulta essere
quello maggiormente diffuso in quanto si riesce ad ottenere una buona
riproducibilità delle caratteristiche del metallo rispettando le proporzioni ed il
rapporto percentuale tra metallo e metri di filo introdotto in modo del tutto
automatizzato, colando in forma direttamente il metallo trattato senza ulteriori
travasi (Figura 29).
Figura 24: Metodo con siviera, presenza Figura 25: Metodo tundish cover
di lega madre sul fondo.
automatico
38
Le ghise sferoidali
Figura 26: Metodo in-mold
Figura 27: Schema per installazione dispositivo filo animato.
39
Le ghise sferoidali
Figura 28: Bobina filo animato
Figura 29: Esempio di impianto filo animato automatizzato.
2.3.2 Tecniche di formatura (preparazione delle forme e delle anime).
I metodi di formatura, cioè di preparazione della forma, si distinguono solitamente in due
gruppi:
(1) i metodi di formatura in forma transitoria, caratterizzati dal fatto che ogni forma può
essere utilizzata per una sola colata e viene distrutta al momento di estrazione del greggio
40
Le ghise sferoidali
(2) i metodi di formatura in forma permanente, (o in conchiglia), nei quali la forma è
progettata e realizzata in modo da poter essere utilizzata per un numero elevato di colate.
Le cavità eventualmente presenti all’interno del getto sono realizzate mediante parti di
forma chiamate anime (figura 30); realizzate in sabbia agglomerata con leganti chimici, e
sono introdotte nella forma prima della sua chiusura.
Le anime vengono utilizzate nella produzione di getti sia nei sistemi con formatura
transitoria (a perdere), sia nei sistemi con forma permanente, nei processi per colata a
gravità.
Figura 30: Disposizione dell’anima nella forma a verde (ramolaggio).
2.3.2.1
La formatura transitoria
I vari procedimenti di formatura in forma transitoria hanno in comune il fatto che il
materiale di formatura è costituito da:
- un elemento refrattario
- un elemento legante, che garantisce la coesione della forma
- degli additivi, che hanno la funzione di correggere alcune caratteristiche del materiale di
formatura, poco adatte all’uso della fonderia (non sempre presenti); spesso gli elementi
leganti hanno anche la funzione di additivi.
I principali elementi refrattari sono delle terre (sabbie) costituite da:
41
Le ghise sferoidali
- Quarzo (SiO2): questo tipo di terra è una delle più comuni e una delle più usate, anche
per il suo basso costo
- Cromite (FeO.Cr2O3): questo tipo di terra ha una refrattarietà maggiore rispetto a quella
silicea, e i grani sono mediamente più piccoli, in modo da far ottenere una migliore finitura
superficiale del prodotto finito.
- Silicato di zirconio (ZrSiO4): questo tipo di terra ha caratteristiche simili a quella di
cromite, ma permette finiture superficiali ancora migliori.
- Olivine: questo tipo di terra è prodotta macinando le rocce naturali. È utilizzata
soprattutto per la produzione di pezzi in acciaio al Mn.
I principali elementi leganti sono:
- Bentonite: questo legante è una argilla con componente attivo la montmorillonite. La
bentonite è spesso attivata con soda, per originare un legante che insieme alla sabbia, dà
una miscela con un’ottima resistenza meccanica a secco e una lunga durata anche a
temperature elevate.
- Resine: le resine sono dei leganti chimici che possono essere classificate in base al
processo di indurimento a cui sono sottoposte:
•
Indurimento a freddo (cold-setting resins)
•
Indurimento con gas (gas-hardened resins)
•
Indurimento a caldo (hot curing resins)
Insieme alle resine sono spesso utilizzati catalizzatori gassosi per iniziare il processo di
indurimento.
- Nero minerale: questo additivo è utilizzato soprattutto nelle fonderie di metalli ferrosi. Ha
la proprietà di migliorare la finitura superficiale del pezzo fuso e di facilitare le operazioni
di sformatura.
- Farina di cereali: questo legante ha la proprietà di eliminare i difetti dovuti all'espansione
della forma.
- Ossidi di ferro: additivo utilizzato soprattutto nella fabbricazione delle anime.
•
Metodologie per la formatura in forma transitoria
Procedimento con formatura in terra verde (figura 30): si utilizzano terra e bentonite (max
10%). La terra è compatta intorno al modello tramite apposite macchine di formatura, che
funzionano a pressione o a vibro-compressione. Questa formatura è utilizzata sia per i
metalli ferrosi che non.
Procedimento con formatura in terra non legata (o sotto vuoto): in questo caso non è
presente nessun legante. La forma si realizza mediante sabbia sciolta depositata sul
42
Le ghise sferoidali
modello, al quale è applicato un sottile film plastico (PEVA), che garantisce la tenuta una
volta che la forma è posta in depressione. Il vuoto consente di mantenere la geometria
dell’impronta realizzata, quando si estrae il modello e nelle successive fasi di colata del
metallo. La sformatura avviene semplicemente eliminando il vuoto; la sabbia si stacca dal
modello ed è riciclata, senza nessun tipo di trattamento di recupero.
Procedimento con formatura con terra e leganti chimici: i procedimenti principali sono tre:
1. Procedimento con indurimento a freddo effettuato a temperatura ambiente.
2. Procedimento di formatura con indurimento con gas (cold box)
3. Procedimento di formatura con indurimento termico (hot box, shell-molding).
43
Le ghise sferoidali
Procedimento di formatura con modello in materiale espanso
In questo caso il modello non è rimosso dalla forma prima della colata, ma rimane
all’interno di essa ed è distrutto quando si cola il metallo.
Il processo porta ad una elevata accuratezza dimensionale ed ad un’ottima precisione
superficiale. Può essere utilizzato sia con terre senza leganti, sia con terre con leganti
chimici.
2.3.2.2
La formatura con forme permanenti
In questo caso le forme sono fatte di metallo, e sono quindi riutilizzate più volte. L’elevato
costo di lavorazione rende giustificabile questo tipo di formatura per le produzioni di serie.
La forma è realizzata in lega metallica, normalmente acciai legati o ghise speciali, in modo
da essere utilizzata per un numero elevato di getti uguali.
2.3.3
La fase di colata
Colata nelle forme transitorie
Il metallo è colato nelle forme attraverso la siviera, o mediante un apposito forno di colata.
Una volta colato il metallo, ha inizio la prima parte del raffreddamento del pezzo, che può
richiedere tempi differenti in funzione della massa del getto. Finita questa fase, la forma
viene aperta e distrutta ed il getto viene separato dalla terra di formatura, permettendo il
successivo recupero di parte di questa.
Colata in forme permanenti
Colata a gravità
Il procedimento consiste nel versare il metallo nella conchiglia per il semplice effetto della
gravità, analogamente alla colata nelle forme di terra a perdere. La colata a pressione,
44
Le ghise sferoidali
diversamente che per i metalli non ferrosi, non viene utilizzata per i getti di ghisa e di
acciaio.
Figura 31: Schema di colata per centrifugazione
Colata centrifuga
Questa tecnica si applica per produrre pezzi cilindrici o simmetrici rispetto ad un asse
longitudinale. Con questa tecnica si riescono ad ottenere proprietà meccaniche del pezzo
non ottenibili con gli altri metodi (Figura 31).
Colata continua
La colata continua è uno dei principali metodi per ottenere barre, tubi e profilati metallici,
con un’alta produttività. Il metallo fuso passa attraverso la conchiglia e acquista la forma
desiderata. Appena al di fuori è raffreddato e poi tagliato alla lunghezza richiesta (Figura
32).
Figura 32: Schema di colata continua
45
Le ghise sferoidali
2.3.4 Trattamenti di finitura
I principali trattamenti meccanici che si applicano sui pezzi colati, una volta raffreddati,
sono:
- rimozione del sistema di colata
- rimozione dei residui di sabbia della forma
- rimozione delle bave
- riparazione di eventuali imprecisioni dovute ad errori durante la colata.
Si cerca di effettuare tutte queste operazioni in modo automatizzato, in modo da aumentare
la produttività. Per quanto riguarda la sbavatura, soprattutto nelle produzioni di serie, si
cerca di fare in modo che le bave si formino in parti del pezzo facilmente accessibili, in
modo da ridurre i tempi di lavorazione.
2.3.5
Trattamenti termici
Per i pezzi metallici, i trattamenti termici che sono principalmente sono quello di ricottura
e quello di tempera. In particolare, per la ghisa sferoidale, i trattamenti termici che possono
essere praticati sono:
- Ricottura di distensione: consiste in un riscaldamento del pezzo ad una velocità di 50100°C all’ora fino a 600°C, seguito da un mantenimento a tale temperatura per un minimo
di un’ora, e a un raffreddamento di 50 – 100 °C all’ora.
- Eliminazione dei carburi: consiste nel mantenere il pezzo ad una temperatura di 900925°C dalle 3 alle 5 ore.
- Bonifica: consiste nel riscaldare il pezzo alla temperatura di austenitizzazione, intorno ai
1000°C, con un successivo rinvenimento intorno ai 500°C.
- Ricottura per produrre una matrice ferritica: consiste nel mantenere il pezzo ad una
temperatura di 900-925°C dalle 3 alle 5 ore, seguito da un lento raffreddamento a 20 –
35°C/h attraverso l’intervallo di temperatura critica (710 – 800°C), e da un raffreddamento
a 50-100°C all’ora fino ai 200°C.
- Normalizzazione per produrre una matrice perlitica: riscaldamento a 900-925°C per
decomporre i carburi, seguito da raffreddamento in aria calma per attraversare in discesa la
temperatura critica, ottenendo una struttura perlitica.
- Ottenimento di strutture di tempra: mediante austenitizzazione a 900-920 °C, con
successiva tempra in olio a 600°C .
46
Le ghise sferoidali
- Processo di “austempering” della ghisa sferoidale:
L’austempering è un processo di tempra isotermica, per ottenere strutture austemprate.
Questo processo è utilizzato, in particolare per produrre getti in ghisa sferoidale (ADI) con
elevate caratteristiche meccaniche.
Il processo è in due stadi: riscaldamento in campo austenitico intorno a 815-930°C, seguito
da tempra isotermica in bagno di sali a temperatura compresa tra 400 e 230°C.
2.4 CONTROLLO DI QUALITÀ DELLA GHISA SFEROIDALE.
Il crescente utilizzo di getti in ghisa sferoidale nella realizzazione di particolari di sicurezza
soprattutto in campo automobilistico, impone alle fonderie una forte attenzione alla qualità
dei greggi di fusione. Per qualità in un processo produttivo si intende qualità a partire dal
controllo delle forniture delle materie prime sino ad arrivare al controllo e verifica delle
proprietà meccaniche del getto finito. Di seguito si riporta per sintesi un tipico schema di
controllo di qualità nella produzione di getti in ghisa sferoidale (figura 33).
Figura 33: Schema del controllo di qualità della ghisa sferoidale.
47
Le reti neurali
CAPITOLO III
LE RETI NEURALI
3.1 INTRODUZIONE
Le reti neurali artificiali (RNA) presentano una struttura simile a quelle del cervello
umano. In particolare, esse sono costituite da un certo numero di neuroni sensori, o
neuroni di input, che costituiscono l’ingresso della rete, da un certo numero di neuroni
motori, o neuroni di output, che costituiscono l’uscita della rete, e da un certo numero di
neuroni intermedi, o neuroni nascosti, che connettono l’ingresso e l’uscita della rete. Ogni
neurone riceve diversi segnali in input ed emette un unico segnale di output. Quest’ultimo
si propaga, grazie ad una serie di collegamenti sinaptici, ai neuroni posti a valle.
Sostanzialmente, in ogni intervallo di tempo, il neurone somma tutti i segnali al suo
ingresso e, se questa somma supera una certa soglia caratteristica, esso si attiva ed invia un
segnale di output, altrimenti rimane quiescente.
Siccome nelle reti neurali artificiali, così come nel cervello umano, la conoscenza è
distribuita su un gran numero di neuroni, le reti neurali risultano essere strutture piuttosto
“robuste”.
3.2 MODELLO DI NEURONE
La struttura del singolo neurone è riportata in figura 34. Gli R ingressi del neurone si
possono rappresentare come un unico vettore p di R elementi. Ad ognuno di questi ingressi
è associato un diverso peso sinaptico w. I diversi pesi associati ai diversi ingressi
costituiscono la cosiddetta matrice dei pesi W. L’ingresso pesato del neurone, pari al
prodotto matriciale W ⊕ p, viene confrontato con la soglia caratteristica b. Quest’ultima si
48
Le reti neurali
può considerare come un’ulteriore ingresso di ampiezza costante e pari ad 1, a cui è
associato un peso pari proprio a b.
Figura 34: Struttura del singolo neurone.
La funzione f è detta funzione di attivazione o funzione di trasferimento del neurone.
Inizialmente come funzione di attivazione fu utilizzata la funzione a gradino. Questo per
limitare in ampiezza l’uscita del neurone. In seguito, invece, con la diffusione
dell’algoritmo di addestramento back-propagation, la funzione a gradino ha lasciato il
posto alla funzione sigmoide. Quest’ultima, infatti, pur continuando a garantire un’uscita
limitata, presenta, a differenza della prima, anche una derivata continua. Ciò risulta
particolarmente importante visto che l’algoritmo back-propagation necessita, durante la
sua implementazione, della derivata della funzione di attivazione [25].
La figura 35 mostra la struttura del singolo neurone in forma più compatta.
Figura 35: Rappresentazione equivalente del singolo neurone.
49
Le reti neurali
3.3 ARCHITETTURA RETE NEURALE
Una rete neurale artificiale è costituita da più strati neurali, ognuno dei quali contiene più
neuroni.
La figura 36 mostra uno strato neurale.
Figura 36: Esempio di strato neurale.
Ad ogni neurone dello strato si può associare una diversa funzione di attivazione, anche se,
in genere, per tutti i neuroni dello stesso strato si sceglie un’unica funzione di attivazione.
In genere ogni rete neurale è costituita da almeno tre strati neurali:
•
Strato di ingresso o input layer;
•
Strato di uscita o output layer;
•
Strato intermedio o hidden layer.
In figura 37 è riportato un esempio di rete multistrato.
Perché una rete neurale possa essere utilizzata è necessario, a valle della fase di progetto
(che consiste nel fissare il numero di strati ed il numero di neuroni costituenti ogni singolo
strato), compiere una fase di addestramento o di apprendimento. Questa fase serve alla rete
per modificare in modo opportuno i diversi pesi sinaptici tra i vari strati, in modo da
minimizzare l’errore tra le uscite effettive e quelle desiderate. In un secondo momento, a
valle della fase di addestramento, la rete sarà in grado di produrre uscite significative anche
per ingressi diversi da quelli visti durante l’addestramento. E’ questa la principale
caratteristica delle reti neurali, che è nota con il nome di proprietà di generalizzazione.
50
Le reti neurali
Figura 37: Esempio di rete multistrato.
3.4 DIVERSI TIPI DI APPRENDIMENTO
Per i diversi tipi di reti neurali esistono sostanzialmente due tipi di apprendimento:
1.
Apprendimento supervisionato;
2. Apprendimento non supervisionato.
3.4.1 Apprendimento supervisionato
L’apprendimento supervisionato si basa sulla disponibilità di una collezione di coppie
ingresso uscita. Questa collezione di coppie è in genere ripartita in due insiemi: un
training-set, utilizzato per l’apprendimento, è un test-set o validation-set, utilizzato per
verificare, ad addestramento concluso, che la rete non si limiti a memorizzare i casi del
training-set, ma che riesca a produrre un’uscita appropriata anche per ingressi simili a
quelli del training-set, ma ad essa ignoti, manifestando così una buona proprietà di
generalizzazione [26].
Durante l’apprendimento supervisionato, la rete, per ogni ingresso In di ogni coppia [In,
Out desiderato] del training-set, produce un’uscita effettiva Out effettivo, diversa, almeno
nelle fasi iniziali, dall’uscita desiderata Outdesiderato. L’apprendimento si conclude
quando l’errore tra l’uscita effettiva e quella desiderata non diventa minore di una certa
soglia prefissata.
3.4.2 Apprendimento non supervisionato
L’apprendimento non supervisionato, invece, non fa riferimento ad una casistica
precostituita di esempi. La rete impara a rispondere in modo ordinato agli stimoli esterni,
51
Le reti neurali
auto-organizzando la propria struttura in modo tale che stimoli simili attivino neuroni
vicini e stimoli diversi attivino neuroni lontani. La rete impara così a classificare gli
ingressi in N possibili classi di uscita.
E’ importante sottolineare che l’apprendimento supervisionato è di tipo competitivo, nel
senso che per ogni ingresso vengono attivati più neuroni, ma uno solo di essi (quello con
attivazione maggiore) vince la competizione e viene premiato con una modifica dei suoi
pesi sinaptici, tale da sintonizzarlo maggiormente con quell’ingresso.
3.5 ARCHITETTURA DELLE DIVERSE RETI NEURALI
Esamineremo adesso le diverse reti neurali e i corrispondenti algoritmi di addestramento.
3.5.1 Reti MLP
Le reti neurali più diffuse sono le reti MLP (Multi-Layer-Perceptron). Si tratta di reti a più
strati, tutti di tipo feed-forward, nel senso che l’uscita di ogni neurone è collegata solo ai
neuroni dello strato successivo, mentre mancano connessioni di tipo feed-back tra un
neurone e quelli dello strato precedente o tra un neurone e se stesso o connessioni laterali
tra un neurone ed un altro dello stesso strato. In figura 38 è riportato un esempio di rete
MLP ad una sola uscita.
Figura 38: Architettura di una rete MLP
52
Le reti neurali
3.5.1.2 Algoritmo di addestramento Back-Propagation
L’algoritmo
di
back-propagation nasce come
generalizzazione
della
legge
di
addestramento di Windrow-Hoff. Esso si basa sulla regole del gradiente discendente (GDA
= GRADIENT DISCENT ALGORITHM). Se si indica con E l’errore quadratico medio tra
l’uscita prodotta dalla rete e l’uscita attesa e con on wjk il generico elemento della matrice
dei pesi, la regola del gradiente
discendente si può esprimere nel seguente modo:
Δw jk = −η
∂E
∂w jk
(4)
Tale regola equivale ad una discesa lungo la superficie d’errore, secondo le linee a
massima pendenza. In particolare, si può facilmente notare che, se l’errore E cresce con
l’aumentare dei pesi sinaptici, se cioè
0) di una quantità proporzionale
l’aumentare dei pesi, cioè se
∂E
> 0, la (4) prevede la diminuzione ( Δw jk <
∂w jk
η , detto learning rate. Viceversa, se E diminuisce con
∂E
∂w jk
< 0, la (4) prevede una diminuzione dei pesi
( Δw jk > 0).
Consideriamo una rete neurale con n ingressi ( xi con i=1,…, n), con un solo strato
nascosto costituito da q neuroni ( zk con k=1,…, q) e con uno strato d’uscita costituito da m
neuroni ( y j con j=1,…, m). Supponiamo inoltre che il training-set sia costituito da p
esempi (cr con r=1,…, p) ed indichiamo con W1 = [wki ] la matrice dei pesi tra lo strato
d’ingresso e quello intermedio, e con W2 = [wjk ] la matrice dei pesi tra lo strato intermedio
è quello d’uscita (vedi figura 39).
L’errore quadratico medio tra uscita prodotta dalla rete e l’uscita attesa è allora:
E=
1 p m
( y rj − d rj ) 2
∑
∑
=
1
=
1
r
j
2
(5)
53
Le reti neurali
Figura 39: rete MLP
Dove y rj e d rj sono, rispettivamente, l’uscita prodotta e l’uscita attesa del neurone
yj
quando x= cr. . Per semplificare la notazione, omettiamo nella (5) la sommatoria con
l’indice r, omettendo:
E=
1 m
∑ ( y rj − d rj ) 2
2 j =1
(6)
Consideriamo quindi la regola del gradiente discendente
Δw jk = −η
∂E
∂w jk
(7)
che può essere scritta come:
Δw jk = −η
∂E ∂y j ∂p j
⋅
⋅
∂y j ∂p j ∂w jk
(8)
dove
q
p j = ∑ w jk ⋅ z k
k =1
(9)
rappresenta l’ingresso del neurone y j .
Indichiamo infine con f2 la funzione di attivazione dello strato di uscita. Si ha allora:
y j = f2(pj)
(10)
Dalla (10) si può ricavare:
54
Le reti neurali
∂E
= ( yi − d j )
∂y j
mentre dalla (11) si può ricavare:
∂y j
∂pi
= f 2' ( p j )
(11)
(12)
Infine, dalla (9) si può ricavare
∂p j
= zk
∂w jk
(13)
Sostituendo la (11), (12), (13) nella (8) si ottiene:
Δw jk = −η ⋅ ( yi − d j ) ⋅ f 2' ( p j ) ⋅ z k
(14)
Ponendo quindi
δ j = ( yi − d j ) ⋅ f 2' ( p j )
(15)
la (14) si può scrivere come:
Δw jk = −η ⋅ δ j ⋅ z k
(16)
La (16) rappresenta la variazione da apportare ai pesi sinaptici tra lo strato intermedio e lo
strato d’uscita alfine di minimizzare l’errore quadratico medio in uscita.
Con analogo ragionamento si ottiene che la variazione da apportare ai pesi tra lo strato di
ingresso e lo strato intermedio è espressa dalla seguente relazione rappresenta l’ingresso
del neurone zk .
Δwki = −η ⋅
∂E
∂E ∂z k ∂pk
=η ⋅
⋅
⋅
∂wki
∂z k ∂pk ∂z k
(17)
dove
n
p = ∑w ⋅ x
k
i =1
ki
i
(18)
rappresenta l’ingresso del neurone zk.
Indicando con f1 la funzione di attivazione dello strato nascosto, si ha anche
zk = f1 (pk)
(19)
da cui si può ricavare
∂z k
= f1' ( p k )
∂p k
(20)
55
Le reti neurali
Dalla (18) si può invece ricavare
∂pk
= xi
∂wki
(21)
Sostituendo la (20) e la (21) nella (17) si ottiene:
Δwki = −η ⋅
∂E
⋅ f1' ( pk ) ⋅ xi
∂wki
(22)
La (22) rappresenta la variazione da apportare ai pesi tra lo strato di ingresso e lo strato
intermedio. Tale variazione dipende dal termine
∂E
, per calcolare il quale è necessario
∂z k
retropropagare l’errore dello strato d’uscita ad ogni neurone dello strato nascosto. Di qui il
nome di algoritmo di back-propagation. In particolare, il termine
∂E
si può esprimere
∂zk
come
m
∂E ∂yi ∂p j
∂E
⋅
⋅
=∑
∂zk j =1 ∂yi ∂p j ∂zk
(23)
Tenendo presente la (10) e la (11) si ha ancora
∂ pj
∂E
'
= ∑ ( yi − d j ) ⋅ f 2 ( pj ) ⋅
∂ zk
∂y j
(24)
Dalla (9) si può quindi ricavare
∂p j
∂zk
= w jk
(25)
Sostituendo la (25) e la (15) nella (24) si ottiene ancora
∂E
∂zk
m
= ∑ δ j ⋅ w jk
j =1
(26)
56
Le reti neurali
Se a questo si sostituisce la (26) nella (22) e si pone
δ k = (∑ δ j ⋅ w jk )⋅ f1' ( pk )
(27)
si ottiene
Δwki = −η ⋅ δ k ⋅ xi
(28)
La (28) è valida non solo per aggiornare i pesi sinaptici tra lo strato di ingresso e lo strato
nascosto, ma, in reti più complesse, anche per aggiornare i pesi sinaptici tra due strati
nascosti consecutivi.
Come detto in precedenza, il learning rate η fissa l’entità dello spostamento lungo la
superficie d’errore (nella direzione del gradiente d’errore) alla ricerca del minimo assoluto.
Non esiste un criterio preciso per la scelta del valore da associare a questo parametro,
anche se è bene ribadire che la scelta del learning rate risulta fondamentale ai fini
dell’efficienza dell’algoritmo di addestramento: un learning rate troppo grande potrebbe
rendere instabile l’algoritmo, portando ad oscillazioni intorno al punto di minimo assoluto
della superficie dell’errore, mentre un learning rate troppo piccolo potrebbe allungare
troppo tempi necessari alla convergenza dell’algoritmo.
3.5.1.3 Varianti dell’algoritmo di back-propagation
I maggiori difetti dell’algoritmo di back-propagation sono:
• Convergenza generalmente lenta;
• Rischio di intrappolarsi in minimi relativi o di oscillazioni attorno al minimo assoluto
della superficie d’errore;
• Tempi di convergenza che aumentano molto più che linearmente con l’aumentare delle
dimensioni (numeri di strati e numeri di nodi per strato) della rete.
Per risolvere questi inconvenienti sono state proposte molte varianti all’algoritmo di
backpropagation [27]. Alcune varianti usano conoscenze euristiche oppure maggiori
conoscenze matematiche della superficie d’errore (conoscenze del secondo ordine); altre
adottano un learning rate variabile, adattandolo continuamente alle caratteristiche locali
della superficie d’errore; altre ancora cambiano addirittura la metrica dell’errore o lasciano
tutto invariato e si limitano ad intervenire sul training-set.
57
Le reti neurali
3.5.1.3.1 Aggiunta del termine “momentum”
La prima è più popolare variante all’algoritmo di back-propagation classico è quella che
prevede l’aggiunta del termine momentum. In questo caso l’aggiornamento dei pesi
avviene seconda la seguente legge:
w jk (t + 1) = w jk (t ) + Δw jk (t ) + β ⋅ Δw jk (t − 1)
(29)
dove β è il coefficiente di momentum (anch’esso, come il learnig rate, compreso tra 0 ed 1 e
senza un criterio rigoroso per definirne il valore).
Come è facile osservare dalla (1.26), il termine aggiunto rappresenta un “ricordo”
dell’aggiornamento effettuato al passo precedente. In sostanza, grazie al termine
momentum, l’aggiornamento dei pesi non dipende più solo dal valore attuale del gradiente
d’errore, ma anche dagli spostamenti precedenti lungo la superficie d’errore. L’effetto del
termine momentum è paragonabile a quello di un filtro spaziale di tipo passa-basso. Esso,
infatti, filtra le variazioni spaziali ad alta frequenza della superficie d’errore, evitando così
rischi di intrappolamento in minimi relativi poco interessanti, cioè molto lontani dal
minimo assoluto. In definitiva, quindi, il termine momentum tende ad accelerare il processo
di apprendimento della rete.
3.5.1.3.2 Learning rate variabile
Solitamente il learning rate viene mantenuto costante sia nel tempo, sia per ogni peso
sinaptico, con il pericolo quindi che esso sia talvolta troppo piccolo, rallentando così
l’apprendimento, talvolta troppo grande, innescando oscillazioni. Esistono allora numerose
varianti che cercano di adattare il learning rate alle proprietà locali della superficie d’errore
.
Una prima variante usa criteri euristici, rappresentati da regole del tipo:
• Se l’errore attuale è maggiore dell’errore al passo precedente, allora il learning rate deve
essere leggermente diminuito;
• Se l’errore attuale è minore dell’errore al passo precedente, allora il learning rate deve
essere leggermente aumentato.
Una seconda variante (Schiffmann, 1993) propone invece un adattamento analitico del
learning rate, modificandolo non solo ad ogni ciclo t del processo di apprendimento, ma
58
Le reti neurali
anche per ogni connessione di peso wjk (t). Indicando con ηjk (t) il learning rate relativo al
tempo t e alla connessione di peso wjk (t), la regola suggerita, che ha consentito di
accelerare la convergenza dell’apprendimento, è:
η jk (t ) = u ⋅η jk (t − 1)
(30)
dove il coefficiente u deve essere leggermente inferiore ad 1 (tipicamente u = 0.7) o
leggermente superiore ad 1 (tipicamente u =1.05), a seconda che siano dello stesso segno o
meno le due derivate:
∂E
∂E
,
∂w jk ∂w jk (t − 1)
Il coefficiente momentum è invece mantenuto costante nel tempo e per tutti i pesi sinaptici.
3.5.1.3.3 Resilient Backpropagation
Come precedentemente anticipato, nelle reti feed-forward la funzione di trasferimento
generalmente usata è la sigmoide. Questa funzione è caratterizzata dall’avere una pendenza
praticamente nulla non appena il suo argomento cresce in modulo. Questo potrebbe
costituire un problema. Infatti, visto che la variazione dei pesi associati ai collegamenti
sinaptici tra lo strato i e lo strato i+1 è proporzionale alla pendenza della funzione di
'
attivazione dello strato i (Δw∞f ) , potrebbe accadere che la correzione apportata ai pesi
sia piccola, malgrado i pesi siano lontani dal loro valore ottimale. Questo comporterebbe
un aumento dei tempi necessari all’addestramento. Per risolvere questo problema si può
ricorrere ad una variante dell’algoritmo backpropagation classico, nota come resilient
back-propagation. Tale algoritmo si basa sulle seguenti regole:
1. I valori aggiornati dei pesi vengono aumentati di un fattore Δs quando ∂E ∂w jk
conserva lo stesso segno per due step consecutivi;
2. I valori aggiornati dei pesi vengono diminuiti di un fattore ΔI quando ∂E ∂w jk
cambia segno tra due step consecutivi.
3.5.1.3.4 Algoritmo di Newton
Questa variante usa conoscenze del secondo ordine della superficie d’errore (l’algoritmo di
back-propagation classico, invece, realizza una discesa lungo il gradiente della superficie
59
Le reti neurali
d’errore, usando la sola derivata prima dell’errore). I pesi vengono aggiornati secondo la
legge
W (t + 1) = W (t ) − H −1 ⋅ (t ) ⋅ g (t )
(31)
dove W è la matrice dei pesi, H è la matrice Hessiana dell’errore, cioè è la matrice delle
derivate seconde dell’errore rispetto a pesi, e g è il gradiente dell’errore.
L’algoritmo di Newton garantisce, in genere, una convergenza più rapida dell’algoritmo di
back-propagation, ma, nel contempo, richiede una capacità computazionale molto
maggiore in quanto, in fase di addestramento, occorre calcolare, ad ogni step, la matrice
Hessiana. Esiste una classe di algoritmi che si basano sul metodo di Newton, ma che non
richiedono il calcolo della matrice Hessiana. Tali algoritmi sono conosciuti come QuasiNewton Alghorithms. Tra questi, particolare importanza ricopre l’algoritmo di LevenbergMarquardt. Quest’ultimo si basa su un’approssimazione della matrice Hessiana. Quando,
infatti, la funzione d’errore ha la forma di una somma al quadrato (così come accade in
genere per le reti feedforward) la matrice Hessiana e il gradiente d’errore si possono
approssimare, ripettivamente, come
T
H = J ⋅J
(32)
T
g = J ⋅e
(33)
dove J è la matrice Jacobiana, cioè la matrice delle derivate prime dell’errore rispetto ai
pesi, ed e è il vettore rappresentativo dell’errore nello spazio dei pesi. Con tali
approssimazioni la legge di addestramento (31) diventa:
[
T
]
T
W (t + 1) = W (t ) − J ⋅ J ⋅ J ⋅ e
3.5.1.3.5
(34)
Metodo Montecarlo
Questo algoritmo si basa sul seguente ciclo:
1. Inizializzazione casuale dei pesi sinaptici e calcolo dell’errore E ;
2. Variazione casuale dei pesi sinaptici, calcolo del nuovo errore E′ e di ΔE = E′ − E ;
3. Se ΔE ≤ 0, accettazione dei nuovi pesi e ritorno al punto 2;
4. Se ΔE ≥ 0, rifiuto dei nuovi pesi, riadozione dei precedenti e ritorno al punto 2.
Suddetto ciclo continua per un numero prefissato di volte o fino a che l’errore E non
scende sotto una soglia minima prefissata. Va sottolineato che a differenza degli algoritmi
60
Le reti neurali
precedenti, l’algoritmo Montecarlo è di tipo greedy (avaro) nel senso che accetta solo le
variazioni dei pesi che diminuiscono l’errore E.
3.5.1.3.6
Intervento sul solo training-set
Questo metodo lascia invariato l’algoritmo di addestramento ed interviene sul solo
training-set, modificandone la struttura e la modalità di presentazione durante la fase di
addestramento. Per quanto riguarda la struttura, una pre-elaborazione statistica provvede ad
eliminare dal set di esempi quelli che presentano un’alta correlazione e, quindi, sono poco
significativi ai fini dell’apprendimento della rete. Il training-set resterà così costituito solo
da esempi tra loro correlati e, quindi, si eviterà di fornire alla rete informazioni ridondanti.
Per quanto riguarda invece la modalità di presentazione, una possibile procedura può
essere:
1. Se l’errore E è maggiore di un ε prefissato, usare tutto il training-set;
2. Se l’errore E non è diventato molto prossimo a zero, ma la rete ha appreso circa il 50%
di esempi, creare con l’altro 50% un secondo training-set. Proseguire poi l’addestramento,
alternando il training-set completo con quello degli esempi più “difficili”.
3.5.2
Reti Radial Basis Function (RBF)
Le reti Radial Basis Function sono ancora reti di tipo feed-forward, la cui particolare
struttura è riportata in figura 40. Queste reti, rispetto alle reti MLP, hanno il vantaggio di
non presentare più il problema dei minimi locali e di richiedere, per la fase di
addestramento, tempi notevolmente minori. Di contro, però, le reti RBF presentano una
scarsa proprietà di generalizzazione e, a parità di problema, richiedono un numero molto
maggiore di neuroni.
61
Le reti neurali
Figura 40: Architettura di una rete RBF
Come è possibile osservare dalla figura, la rete è costituita da due strati: il primo di tipo
radial basis e il secondo di tipo lineare. Il blocco ||dist|| riceve il vettore di ingresso p, e
produce in uscita un vettore di S1 elementi. Tali elementi rappresentano i prodotti scalari
tra gli S1 vettori costituiti dalle righe della matrice dei pesi IW ed il vettore di ingresso p,
cioè rappresentano un indice della distanza euclidea tra le S1 righe di IW e il vettore p. Se
il vettore di ingresso p è completamente diverso dalle righe della matrice IW , gli S1
elementi del vettore d’uscita dello strato radial basis saranno prossimi a zero. Pertanto
anche gli S2 elementi del vettore d’uscita dello strato lineare saranno prossimi a zero.
Viceversa, se il vettore di ingresso p è prossimo ad una delle righe della matrice IW , ad
esempio alla j-esima, il neurone j-esimo dello strato radial basis restituirà un’uscita
prossima ad 1. In questo caso gli S2 elementi del vettore d’uscita dello strato lineare
saranno praticamente coincidenti con gli S2 elementi della colonna j-esima della matrice
LW .
Le reti RBF in genere si utilizzano per la risoluzione di problemi semplici, come possono
essere i problemi di classificazione, laddove le possibili uscite sono limitate, per cui non è
richiesta una particolare capacità di generalizzazione ed il numero di nodi necessari può
essere contenuto.
3.5.3 Reti Self-Organizing
62
Le reti neurali
Le reti con capacità di auto-organizzazione sono in grado di rilevare le regolarità e le
correlazioni tra gli ingressi, e, in base a queste, di adattare il loro comportamento futuro.
Esse, pertanto, apprendono senza necessità di supervisione, cioè senza richiedere un
training-set di esempi noti, e ciò le rende affini ad alcune strutture del sistema neurobiologico. Nel cervello umano, infatti, si vengono a formare, in base all’autoapprendimento, mappe corticali tali che neuroni vicini sono attivati da stimoli simili.
Analogamente, le reti self-organizing modificano autonomamente i loro pesi in funzione
degli stimoli esterni, in modo che ingressi simili producano uscite uguali.
Le reti self-organizing più conosciute sono:
• Le reti competitive (CN = Competitive Network);
• Le reti di Kohonen, dette anche reti SOM (Self Organizing Maps).
3.5.3.1 Reti Competitive (CN)
L’architettura di una rete competitiva è mostrata in figura 41.
Figura 41: Architettura di una rete competitiva
L’uscita del blocco ||ndist|| è un vettore, le cui componenti rappresentano la distanza
(espressa in termini di prodotto scalare), con segno “-“, tra il vettore di ingresso p e le righe
della matrice dei pesi IW . Tale vettore viene sommato al vettore degli offset b, ottenendo
così il vettore n .
Supponiamo per il momento che tutte le componenti del vettore b siano nulle. In questo
caso ogni componente del vettore n potrà al più essere nulla (visto che le uscite del blocco
||ndist|| sono negative o al più nulle). In particolare, la componente j-esima del vettore n
63
Le reti neurali
sarà nulla solo nel caso in cui la riga j-esima della matrice
IW
è uguale al vettore di
ingresso p. La funzione di attivazione c è di tipo competitivo (di qui il nome della rete),
essa cioè produce in uscita un vettore a le cui componenti sono tutte nulle, fatta eccezione
per la componente di posto j, dove j e la posizione occupata in n dalla componente di
ampiezza massima. Il neurone j, a cui è associato al vettore dei pesi (riga della matrice
IW
) vincitore della competizione, si dice neurone vincitore (winner neuron).
Quando un neurone risulta vincitore di una competizione, il vettore dei pesi ad esso
associato viene avvicinato al vettore d’ingresso corrente. In questo modo, si aumenta la
probabilità che in futuro, per ingressi simili, risulti vincente ancora lo stesso neurone, e nel
contempo, si riduce la probabilità che, per ingressi diversi, suddetto neurone risulti il
vincitore della competizione. E’ proprio su questa filosofia che si basa la regola di
addestramento di Kohonen. Secondo quest’ultima, infatti, se j è il neurone vincitore della
competizione all’istante t e se
IW
j è il vettore dei pesi associato al neurone j, la
correzione da apportare ai pesi all’istante t deve essere:
(
IW j (t ) = IW j (t − 1) + α p(t ) − IW j (t − 1) )
(35)
La (35) equivale ad una piccola (α < 1) rotazione del vettore dei pesi verso il vettore di
ingresso, ossia ad un avvicinamento dei due.
Le reti competitive presentano un grosso limite. Può accadere, infatti, che alcuni vettori dei
pesi siano inizialmente molto lontani dai vettori posti in ingresso alla rete e, pertanto, non
risultino mai vincitori della competizione. In questo caso, secondo quanto previsto dalla
regola di addestramento di Kohonen, i pesi di tali vettori non verrebbero mai aggiornati e,
quindi, tali vettori continuerebbero a non risultare mai vincenti. I neuroni associati a tali
vettori si dicono morti (dead neuron), in quanto, in concreto, non partecipano al
funzionamento della rete.
Per ovviare a questo inconveniente, vengono introdotti gli offset, il cui scopo è quello di
“avvantaggiare” i neuroni che risultano raramente vincenti, e di “svantaggiare” i neuroni
che risultano spesso vincenti. Un offset positivo aggiunto ad uno dei termini (negativi) in
uscita dal blocco ||ndist||, fa aumentare la probabilità che il neurone corrispondente risulti
vincitore della competizione. In questo modo è possibile “riattivare” i neuroni in
precedenza morti.
64
Le reti neurali
Per scegliere opportunamente gli offset è sufficiente conoscere, in ogni istante, il valore
medio di ogni componente dell’uscita a. Quest’ultimo, infatti, è indice del numero di volte
in cui il corrispondente neurone è risultato vincitore della competizione (se, ad esempio, il
valore medio della componente j-esima di a è pari a 0.5, vuol dire che, fino a quel
momento, il neurone j ha vinto il 50% delle competizioni). Pertanto, quando il valore
medio di una componente di a è alto, il corrispondente offset va diminuito, mentre quando
il valore medio di una componente di a è basso, il corrispondente offset va aumentato. La
regola appena enunciata è nota come Bias Learning Rule.
3.5.3.2 Reti SOM (Self-Organizing Maps)
L’architettura delle reti SOM è mostrata in figura 42.
Figura 42: Architettura delle reti SOM.
Tale architettura è simile a quella vista per le reti CN, dalla quale si differenzia solo per
l’assenza del vettore degli offset. Un’altra differenza sostanziale rispetto alle reti CN è
legata alla procedure di aggiornamento dei pesi. Stavolta, infatti, quando il neurone j vince
la competizione, non viene
aggiornato il solo vettore dei pesi associato al neurone j, ma anche i vettori dei pesi
associati a tutti i neuroni posti in un intorno N j(d) del neurone j, dove N j(d) è l’insieme
dei neuroni posti ad una distanza non superiore a d dal neurone j:
N j(d)= {i, dij ≤ d}
Le reti self-organizing sono particolarmente adatte per risolvere problemi di
classificazione. Esse, infatti, dividono lo spazio delle possibili uscite in S1 regioni distinte
e si limitano a classificare il vettore di ingresso come appartenente ad una di queste
65
Le reti neurali
regioni. Ciò che veramente le contraddistingue rispetto alle reti precedentemente esaminate
è però la loro capacità di addestramento senza supervisione.
3.5.3
Reti Learning Vector Quantization (LVQ)
La tecnica di addestramento Learning Vector Quantization permette di addestrare in
maniera supervisionata, cioè con un adeguato training-set, le reti con una struttura di tipo
competitivo. Le reti che utilizzano questa modalità di apprendimento sono note come reti
LVQ (Learning Vector Quantization). L’architettura di una rete LVQ è riportata in figura
43.
Come si può osservare dalla figura, il primo strato della rete è uno strato di tipo
competitivo, mentre il secondo strato è di tipo lineare. Lo strato competitivo classifica gli
ingressi, adottando la stessa tecnica usata dalle reti CN. Quindi, se tale strato è costituito da
S 1 neuroni, il vettore di ingresso sarà classificato come appartenente ad una tra S 1 distinte
classi, dette sottoclassi (subclasses). Lo strato lineare, invece, “mappa” le S 1 sottoclassi
dello strato competitivo in S 2 classi (con S 2 < S1 ), dette classi target (target classes).
Figura 43: Architettura di una rete LVQ
Supponiamo, ad esempio, che le sottoclassi associate ai neuroni 1, 2 e 3 dello stato
competitivo debbano rientrare tutte nella stessa classe target, ad esempio la 2, dello strato
lineare. Allora i pesi tra i neuroni 1, 2 e 3 dello strato competitivo e il neurone 2 dello
strato lineare dovranno essere pari ad 1, mentre tutti gli altri pesi che legano i neuroni dello
strato competitivo al neurone 2 dello strato lineare dovranno essere pari a 0. In altre parole,
la seconda riga della matrice dei pesi LW dovrà presentare degli “1” nelle prime tre
posizioni, e degli “0” nelle restanti posizioni. Questo per dire che, una volta stabilito
quante e quali sottoclassi dello strato competitivo debbano essere “mappate” in una stessa
66
Le reti neurali
classe target dello strato lineare, la matrice dei pesi LW resta univocamente fissata.
L’addestramento della rete, dunque, modifica solo i pesi della matrice IW .
3.5.3.1 Regola di addestramento LVQ
Ogni target ti presentato alla rete in fase di addestramento è un vettore di S 2 elementi, dei
quali (S2 −1) sono pari a “0” ed uno, quello occupante la posizione j (se j è la classe target
a cui deve appartenere l’ingresso), è pari ad “1”. La fase di addestramento si svolge come
segue. Ogni vettore pi del training-set viene confrontato con le righe della matrice dei pesi .
Se j è la riga più vicina (in termini di prodotto scalare) al vettore di ingresso pi, allora il
vettore d’uscita a1dello strato competitivo presenterà un 1 nella posizione j-esima, e uno 0
in tutte le altre posizioni. Lo strato lineare, a seconda della posizione j occupata dall’1 nel
vettore a1, determinerà la classe target k a cui il vettore di ingresso appartiene, restituendo
un vettore a2 , che presenta un 1 nella posizione k-esima, e uno 0 in tutte le altre posizioni.
A questo punto si possono presentare due casi:
• a2 ≠ ti , cioè il vettore di ingresso è stato riconosciuto come appartenente ad una classe
diversa da quella imposta dal target ti. In questo caso la riga j-esima della matrice IW
viene allontanata, mediante una rotazione, dal vettore pi:
(
IW j (t ) = IW j (t − 1) + α p(t ) − IW j (t − 1) )
• a2 = ti , cioè il vettore di ingresso è stato riconosciuto come appartenente alla classe
imposta dal target ti. In questo caso la riga j-esima della matrice IW viene avvicinata,
mediante una rotazione, al vettore pi:
(
IW j (t ) = IW j (t − 1) + α p(t ) − IW j (t − 1) )
3.5.3.2 Reti Ricorrenti (RN = Recurrent Network)
Le reti finora esaminate sono, come già anticipato, delle reti feed-forward, cioè i segnali
neurali si possono propagare in una sola direzione (dall’input all’output), mancando sia
connessioni laterali (tra i neuroni dello stesso strato), sia connessioni di tipo feed-back (tra
i neuroni di uno strato è quelli del precedente o tra un neurone è se stesso). Tra le tante reti
che si possono ottenere connettendo insieme N neuroni in tutti i modi possibili, sono
67
Le reti neurali
particolarmente interessanti, anche se il loro funzionamento è piuttosto complesso, le reti
ricorrenti, che presentano connessioni laterali e feed-back .
Tra le reti ricorrenti più usate vi sono le reti di Elman e le reti di Hopfield.
3.5.3.3 Reti di Elman
Le reti di Elman sono in genere costituite da tre strati (lo strato di ingresso, uno strato
nascosto e lo strato di uscita) e presentano una retroazione tra l’uscita dello strato nascosto
e l’ingresso (vedi figura 43).
Figura 43: Architettura di una rete Elmann
Tale retroazione rende la rete un sistema dinamico, particolarmente adatto, quindi, ad
esaminare grandezze tempo-varianti.
La funzione di attivazione dello strato ricorrente è la sigmoide, mentre la funzione di
attivazione dello strato di uscita è di tipo lineare. Questa combinazione è particolarmente
adatta in quanto consente di approssimare qualsiasi funzione del tempo con un numero
finito di discontinuità. Vale però la pena di osservare che, maggiore è la complessità della
funzione che con la rete si intende approssimare, maggiore deve essere il numero di
neuroni costituenti lo strato nascosto della rete.
Il blocco di ritardo D immagazzina il vettore a1 all’istante t-1, per poi ripresentarlo in
ingresso alla rete all’istante t.
L’algoritmo di addestramento per le reti di Elman è l’algoritmo di backpropagation
classico, già ampiamente discusso quando sono state trattate le reti MLP. Vale però la pena
di osservare che nel caso delle reti di Elman tale algoritmo lavora su un valore
68
Le reti neurali
approssimato del gradiente d’errore in quanto il contributo al calcolo dell’errore dovuto
alla retroazione viene trascurato. Per questo motivo le reti di Elman si rivelano in genere
meno affidabili rispetto ad altri tipi di reti.
3.5.3.4 Reti di Hopfield
L’obiettivo di queste reti è quello di simulare un sistema con un certo numero di punti di
equilibrio stabili. Una rete di Hopfield, quindi, per certe condizioni iniziali tende a lasciare
il suo attuale punto di equilibrio per portarsi in un nuovo punto di equilibrio, ed ivi
rimanere.
Il fatto che la rete di Hopfield possa evolvere verso punti di equilibrio stabili ne ha favorito
l’impiego come memoria auto-associativa. Rileviamo che, in una memoria autoassociativa, presentando in input una forma (pattern) inquinata da disturbi e “rumore” o
addirittura incompleta, viene restituita in uscita la forma depurata dal rumore ed
adeguatamente completata. Ad esempio, se l’input è una lettera dell’alfabeto con numerosi
pixel deteriorati o mancanti (figura 44a), l’output sarà la versione perfetta di quella lettera
(figura 44b).
Figura 44: Ricerca di una forma F partendo da una sua versione inquinata.
Per ottenere ciò occorre, ovviamente, che la forma depurata dal rumore sia uno stato finale
stabile per la rete. Si capisce allora che la capacità p della memoria auto-associativa
realizzata con una rete di Hopfield coincide con il numero p di stati stabili della rete. Va
però precisato che in genere non si riesce a progettare reti di Hopfield che abbiano come
punti di equilibrio tutti e soli quelli desiderati. Molto spesso, infatti, si vengono a creare
una serie di punti di equilibrio spuri, che, in certe situazioni, rendono il comportamento
della rete imprevedibile.
69
Le reti neurali
Fortunatamente il numero di questi punti è limitato ed il loro dominio di attrazione è
minore di quello dei punti di equilibrio desiderati. L’architettura di una rete di Hopfield è
mostrata in figura 45.
L’ingresso p rappresenta le condizioni iniziali per la rete. Una volta che alla rete viene
applicato un nuovo ingresso p , la rete produce una nuova uscita, che retroazionata,
diventano il nuovo ingresso. Questo ciclo continua fino a quando la rete non raggiunge un
nuovo punto di equilibrio stabile. Le reti di Hopfield non necessitano di una fase di
addestramento. Per progettare e realizzare una nuova rete, infatti, è necessario solo fissare i
punti di equilibrio stabili che la rete deve avere.
3.5.4
Reti ricorrenti per modellare i sistemi dinamici
Supponiamo di considerare un sistema dinamico descritto dall’equazione differenziale non
lineare:
dx
= F (x(t ), u (t ) )
dt
(36)
dove x(t) è il vettore delle variabili di stato e u(t) è il vettore degli ingressi al sistema.
Se è possibile approssimare la soluzione dell’equazione (36) al primo ordine, se cioè è
possibile scrivere x(t) come
Figura 45: Architettura di una rete di Hopfield
70
Le reti neurali
x(t ) = x(t − 1) +
∂ x ⋅ (t − Δt )
⋅ Δt
∂t
(37)
dove Δt è un infinitesimo di ordine sufficiente per poter trascurare nella (1.34) i termini di
ordine superiore, allora il sistema descritto dalla (1.33) può essere modellato utilizzando la
rete ricorrente di figura 46.
I due strati della rete servono ad approssimare la funzione F , mentre la retroazione serve a
ricreare in ingresso alla rete, con l’approssimazione espressa dalla (1.34), lo stato x(t).
Nella sua interezza, quindi, la rete di figura 45 permette di ricostruire l’equazione (36).
Da un punto di vista di principio, la rete di figura 46 può essere addestrata in modo
classico, con la solita procedura di minimizzazione dell’errore quadratico medio. Per
applicare tale procedura, però, è necessario disporre di una relazione che esprima il
gradiente d’errore rispetto ai pesi della rete. A tal proposito, si consideri la generica
componente k-esima del vettore x(t), che, in base alla (37), può essere espressa come:
xk (t ) = xk (t − 1) +
dove y k =
∂xk ⋅ (t − Δt )
⋅ Δt = xk (t − 1) + yk (t − 1) ⋅ Δt
∂t
(38)
∂xk (t )
rappresenta l’uscita della rete. Dalla (38) si può ricavare facilmente
∂t
∂xk (t ) ∂xk ⋅ (t − 1) ∂yk ⋅ (t − 1)
+
⋅ Δt
=
∂t
∂t
∂t
(39)
poniamo inoltre
• pm(t)= ingressi dei neuroni dello strato nascosto;
• hm(t)= uscite dei neuroni dello strato nascosto;
• f = funzione di attivazione dei neuroni dello strato nascosto;
• qk (t)= ingressi dei neuroni dello strato di uscita;
• yk (t)= uscite dei neuroni dello strato di uscita;
• g = funzione di attivazione dei neuroni dello strato nascosto;
Si avrà allora:
pm (t ) = ∑ wkm ⋅ xk (t − 1) + ∑ wlm ⋅ ul (t − 1)
k
(40)
l
71
Le reti neurali
hm (t − 1) = f [ pm (t − 1)]
(41)
qk (t − 1) = ∑ wkm ⋅ hm (t − 1)
(42)
m
yk (t − 1) = g [qk (t − 1)]
(43)
Dalla (43) si può ricavare
Figura 46: Esempio di rete per il modellamento dei sistemi dinamici
∂yk (t − 1)
∂q ⋅ (t − 1)
= g ' [qk (t − 1)] ⋅ k
∂wij
∂wij
(44)
mentre dalla (42) si può ricavare
⎛ ∂w
∂qk (t − 1)
∂h (t − 1) ⎞⎟
= ∑ ⎜ mk ⋅ hm (t − 1) + wkm ⋅ m
⎜
∂wij
∂wij ⎟⎠
m ⎝ ∂wij
(45)
72
Le reti neurali
Siccome ogni peso sinaptico è indipendente da tutti gli altri, il primo termine nella
sommatoria al secondo membro della (45) è non nullo e pari ad 1 solo per
wmk = wij .
Pertanto la (45) si può ancora scrivere come:
∂qk (t − 1)
∂h (t − 1)
= δ kj ⋅ δ iH ⋅ hi ⋅ (t − 1) + ∑ wmk ⋅ m
∂wij
∂wij
m
dove
δ kj
è la delta di Dirac, mentre
δ iH =
δ iH
(46)
è definita come:
{
1 se i è un hidden neuron
0 altrimenti
Analogamente, dalla (41) si può ricavare
∂hm (t − 1)
∂p ⋅ (t − 1)
= f ' [ pm (t − 1)]⋅ m
∂wij
∂wij
(47)
Mentre dalla (40) si può ricavare:
⎛ ∂w
∂w
∂x (t − 1) ⎞⎟
∂pm (t − 1)
+ ∑ lm ⋅ ul (t − 1) =
= ∑ ⎜ km ⋅ xk (t − 1) + wkm ⋅ k
⎜
∂wij ⎟⎠ l ∂wij
∂wij
k ⎝ ∂wij
δ mj ⋅ δ iX ⋅ xi (t − 1) + ∑ wkm ⋅
k
Dove
δ mj
∂xk (t − 1)
+ δ mj ⋅ δ iU ⋅ ui (t − 1)
∂wij
è la delta di Dirac, mentre
δ iX e δ iU
i è un neurone
δ iX = {10 sealtrimenti
δ iU =
(48)
sono definite come
dello strato d' uscita
{
1 se i è un neurone dello strato d' ingresso
0 altrimenti
Se a questo punto si pone:
∂xk (t )
= Φ ijk (t )
∂wij
(49)
73
Le reti neurali
∂yk (t )
= Ψkij (t )
∂wij
(50)
l’equazione diventa (39) diventa:
Φ ijk (t ) = Φ ijk (t − 1) + Ψkij (t − 1) ⋅ Δt
(51)
Sostituendo la (46) nella (44) si ottiene
⎛
∂h (t − 1) ⎞⎟
Ψkij (t − 1) = g ' [qk (t − 1)]⋅ ⎜ δ kj ⋅ δ iH ⋅ hi (t − 1) + ∑ wkm m
⎜
∂wij ⎟⎠
m
⎝
(52)
Mentre sostituendo la (48) nella (47) si ottiene
⎧δ mj ⋅ [δ iX ⋅ xi (t − 1) + δ iX ⋅ ui (t − 1)] + ⎫
∂hm (t − 1)
⎪
⎪
'
= f [ pm (t − 1)] ⋅ ⎨
ij
⎬
wkm ⋅ Φ k (t − 1)
∂wij
⎪⎩∑
⎪⎭
k
(53)
Sostituendo infine la (53) nella (52) si ottiene
⎧
Ψkij (t − 1) = g ' [qk (t − 1)]⋅ ⎨δ kj ⋅ δ iH ⋅ hi (t − 1) + ∑ wkm ⋅ f ' [ pm (t − 1)]×
m
⎩
⎞⎫
⎛
× ⎜ δ mj ⋅ [δ iX ⋅ xi (t − 1) + δ iX ⋅ ui (t − 1)] + ∑ wkm ⋅ Φ ijk (t − 1) ⎟⎬
k
⎠⎭
⎝
(54)
La (54) è una relazione ricorsiva, che permette di calcolare Φ k (t ) a partire da Φ k (t
ij
Per risolvere questa equazione e sufficiente fissare il valore iniziale
ij
− 1) .
Φ ijk (0) . Quest’ultimo
è pari a zero visto che lo stato iniziale del sistema è indipendente dai pesi della rete stessa.
Una volta noto
Φ ijk (t )
è facile ricavare anche il gradiente dell’errore in funzione dei pesi
della rete. Basta infatti, notare che, essendo l’errore quadratico medio definito come
E (t ) =
1
⋅∑
2 k
[x (t ) − t (t )]
2
k
k
=
1
2
⋅ ∑ ek (t )
2 k
74
Le reti neurali
con
t
k
(t ) indicante il target all’istante t, il gradiente dell’errore si può calcolare come:
∂E
∂x (t )
∂x (t )
= ∑ [xk (t ) − t k (t )] ⋅ k = ∑ ek (t ) ⋅ k
k
k
∂wij
∂wij
∂wij
(55)
La (55), tenuto conto della (49) si può ancora scrivere come
∂E
= ∑ ek (t ) ⋅ Φ ijk (t )
k
∂wij
(56)
La (56) rappresenta la relazione cercata, che consente il calcolo del gradiente d’errore
rispetto a pesi e, quindi, l’addestramento della rete.
3.6 Commenti
È possibile a questo punto fare una serie di considerazioni generali, utili ai fini del progetto
e della realizzazione delle reti neurali, con un occhio di riguardo nei confronti delle reti
MLP, che, come anticipato, sono di gran lunga le più diffuse. Innanzitutto è importante
stabilire in quali applicazioni è conveniente riccone all’uso di reti neurali. Sarebbe
ovviamente assurdo ricorrere alle reti in applicazioni basate su algoritmi noti, facilmente
programmabili ed eseguibili in tempi ragionevoli su calcolatori tradizionali [28]. Ciò vale,
in modo particolare, se i dati necessari sono quantitativi, certi e completi e i risultati
devono essere matematicamente precisi [1]. In questo caso, infatti, risulterebbe
completamente inutile, ed anzi controproducente, la principale proprietà delle reti neurali:
la proprietà di generalizzazione.
Le reti neurali sono invece convenienti quando:
a. La modalità di risoluzione del problema è prevalentemente qualitativa, empirica, basata
anche sul buon senso;
b. Sono consentiti risultati “sfumati”, cioè variabili entro un certo range;
c. L’applicazione non riveste un’importanza critica, poiché le reti neurali non sono
infallibili al 100%;
d. E’ richiesta la consulenza di esperti del problema, che però non sono disponibili o, se
disponibili, hanno conoscenze incomplete e difficilmente formalizzabili in algoritmi o
regole per sistemi esperti;
e. Il compito che la rete deve eseguire ha carattere ripetitivo e consente quindi
l’ammortamento della lunga fase di addestramento e messa a punto.
75
Le reti neurali
Una volta stabilito che il problema da risolvere può essere trattato con una rete neurale,
occorre definirne l’architettura. Per quanto riguardo il numero di neuroni di uno strato, non
esistono criteri rigorosi di scelta, ma solo criteri empirici, dettati dall’esperienza.
Una formula empirica suggerisce, ad esempio, di assumere un numero N
n
di neuroni
nascosti, tale che sia
10 × Numeri pesi < Numero esempi
Un’altra formula suggerisce:
Nn =
Numero esempi × Errore percentuale consentito
Numero input + Numero output
Vale la pena di osservare che pochi neuroni nascosti impediscono un adeguato
apprendimento, mentre troppi neuroni nascosti portano ad un “iper-apprendimento” della
rete, cioè ad un apprendimento “a memoria” del training-set, e, quindi, ad una scarsa
proprietà di generalizzazione.
Per ovviare a questo problema, esistono una serie di varianti adattative all’algoritmo di
backpropagation, che possono essere definite Apprendimento Strutturale (Structural
Learning). Una prima variante, proposta da Ash nel 1989, consente la creazione dinamica
di neuroni intermedi secondo necessità. Il processo inizia con un numero relativamente
piccolo di neuroni nascosti che, ove non si consegua una determinata tolleranza d’errore
dopo un numero prefissato di cicli, viene incrementato, conservando i pesi delle vecchie
connessioni ed assegnando valori random ai pesi delle nuove. L’apprendimento può così
riprendere dal punto in cui si era giunti, aggiungendo eventualmente nuovi esempi al
training-set. Questo schema adattativo è anche utile per aggiornare reti già esistenti.
Una seconda variante, anziché partire da pochi neuroni intermedi e poi incrementarli
secondo necessità, adotta il criterio opposto di partire da tanti neuroni intermedi e
diminuirli secondo necessità (pruning).
Per quanto concerne invece i neuroni dello strato di ingresso, il loro numero è fissato dal
numero di variabili che la rete deve monitorare, così come il numero di neuroni dello strato
d’uscita è fissato dal numero di variabili rappresentanti la soluzione del problema.
La funzione di attivazione dei diversi strati, invece, ha come unico vincolo quello di dover
avere derivata continua. Le funzioni di attivazione più usate sono la sigmoide o la funzione
lineare. In particolare, si sceglie come funzione di attivazione di uno strato la sigmoide
quando si vuole che l’uscita dello strato sia limitata, mentre si sceglie la funzione lineare
76
Le reti neurali
quando si vuole che l’uscita dello strato possa assumere un qualsiasi valore compreso tra
−∞ e +∞.
Per quanto riguarda gli esempi da utilizzare in fase di apprendimento, vale la pena di
osservare che la loro scelta riveste un’importanza critica, visto che le prestazioni di una
rete neurale sono direttamente proporzionali al training-set. Circa il numero di esempi che
deve contenere il training set, va osservato che esso deve essere proporzionale alla
complessità del problema e della rete. Non
esistono criteri rigorosi di scelta, ma solo criteri empirici del tipo
Numero esempi >>5 × Numero output × Numero pesi
Spesso, inoltre, risulta utile aggiungere rumore al training-set; ciò, infatti, forza la rete
verso una maggiore proprietà di generalizzazione.
Per quanto riguarda invece la qualità degli esempi, questi devono costituire un campione
statisticamente significativo del problema in esame. Inoltre è evidente la necessità di avere
una distribuzione omogenea degli esempi, nel senso che non ci si dovrebbe mai soffermare
a mostrare alla rete i soli casi “normali” del problema, ma includere, in parti uguali, anche
le situazioni “eccezionali”.
Gli esempi disponibili devono infine essere ripartiti in due sottoinsiemi equilibrati con
distribuzione omogenea: l’uno costituente il training-set, da impiegare nella fase di
apprendimento e, alla fine, per valutare le prestazioni di richiamo degli esempi appresi;
l’altro, che costituisce il validation-set, da utilizzare per la verifica delle prestazioni di
generalizzazione.
Restano infine da scegliere i parametri dell’addestramento, quali il learning rate η, il
coefficiente momentum β ed il numero di epoche (cioè il numero di volte, che, in fase di
addestramento, si presenta alla rete il training-set). Anche per questi parametri non esistono
criteri rigorosi di scelta, ma solo criteri empici come quello di adottare valori inizialmente
grandi e diminuirli progressivamente, con il progredire dell’apprendimento, in base al
valore corrente dell’errore quadratico medio.
Altri gradi di libertà che influenzano l’apprendimento sono l’errore minimo min E ,
raggiunto il quale il processo di addestramento è da considerasi concluso, nonché la
modalità di presentazione degli esempi. Generalmente è bene che l’errore minimo
prefissato min E sia prima relativamente grande, per un apprendimento preliminare
grossolano, per poi diminuirlo, in modo da raffinare l’apprendimento. Per quanto concerne
la modalità di presentazione degli esempi, invece, va detto che questa può essere di due
tipi: batch (aggiornamento dei pesi alla fine di ogni epoca) oppure ondine (aggiornamento
77
Le reti neurali
dei pesi alla fine di ogni esempio): quest’ultima modalità favorisce, in genere, la
fuoriuscita dai minimi relativi della superficie d’errore nello spazio dei pesi.
In questo lavoro di tesi il problema dell’identificazione e della caratterizzazione degli
sferoidi di grafite nelle ghise sferoidali è stato affrontato utilizzando le reti neurali
artificiali. Negli ultimi anni le reti neurali sono state impiegate con risultati interessanti in
molti campi, in particolare nell’analisi di immagini mediche, nel riconoscimento di oggetti
e nell’analisi di testi; solo recentemente le reti neurali sono state applicate nell’analisi della
microstruttura dei materiali. Nel caso delle ghise sferoidali, le immagini ricavabili dalla
analisi metallografica al microscopio ottico mostrano, oltre agli sferoidi, profili irregolari e
artefatti dovuti alla procedura di acquisizione, che devono essere distinti dagli elementi di
interesse. Si propone una procedura di identificazione basata sulle reti neurali in grado di
riconoscere i profili relativi agli sferoidi. L’addestramento viene effettuato mediante un
alfabeto di strutture locali tipiche; l’addestramento viene effettuato anche in presenza di
livelli diversi di degradazione dell’alfabeto stesso. La rete cosi’ addestrata è stata quindi
utilizzata su immagini ottenute da campioni metallografici ricavati da differenti ghise
sferoidali ferrito-perlitiche. La procedura proposta risulta robusta rispetto agli artefatti e al
rumore additivo.
78
Resistenza a fatica
CAPITOLO IV
RESISTENZA A FATICA
4.1 NOZIONI INTRODUTTIVE
La fatica di un materiale si riscontra ogni volta che esso viene sottoposto a sforzi variabili
ciclicamente nel tempo, che possono provocare la rottura (detta appunto rottura per fatica)
se il numero di cicli di ripetizione è sufficientemente alto, pur essendo il valore massimo
degli sforzi molto minore di quello di snervamento o di rottura in condizioni statiche.
Per ogni valore di sforzo minimo esiste un valore limite di sforzo massimo al di sotto del
quale non si verifica la rottura del materiale per quanto grande sia il numero di ripetizioni
del ciclo di sforzi: a tale valore limite si dà il nome di limite di fatica. Per inquadrare il
fenomeno della fatica (che interessa strutture, materiali e meccanismi, in particolare
sottoposti a sollecitazioni cicliche), occorre in primo luogo definire le possibili leggi di
variazione della sollecitazione, per ognuna delle quali sarà diverso il limite di fatica; queste
si possono in pratica ricondurre a quattro cicli fondamentali (schematizzati in figura 47):
♦ alterno simmetrico, in cui la sollecitazione oscilla con legga sinusoidale tra due valori di
segno opposto, ma di uguale valore assoluto;
♦ alterno asimmetrico, in cui i due estremi di sollecitazione hanno segno opposto e
diverso valore assoluto;
♦ dello zero, in cui uno degli estremi di sollecitazione è uguale a zero;
♦ pulsante, in cui la sollecitazione varia tra due estremi dello stesso segno.
79
Resistenza a fatica
=
m
max
+
2
min
a
2
max
=0
max =
min
=0
min
max
min
=
m
a
=
max
2
=
a
m
tempo t
min
a
=
m
a
tensione
ciclo alterno
asimmetrico
ciclo alterno
simmetrico
ciclo
pulsante
ciclo dallo
zero
Figura 47: Cicli fondamentali con cui è possibile sollecitare i provini [30] .
In tutti i materiali omogenei si trova una corrispondenza biunivoca tra il numero dei cicli
necessari ed il valore massimo della sollecitazione, che ripetuta quel determinato numero
di volte, ne provoca la rottura. Benchè la natura del fenomeno non sia ancora del tutto
conosciuta, si ritiene che la rottura a fatica derivi da una progressiva alterazione dello
strato superficiale del materiale, che, estendendosi, riduce la sezione resistente fino a
determinarne il cedimento senza che precedentemente si siano prodotte deformazioni
permanenti apprezzabili.
La rottura per fatica può inoltre essere influenzata dalla struttura interna del materiale (sua
natura, lavorazione e tipo di finitura superficiale), dalla forma, dalle dimensioni e dallo
stato della struttura di cui fa parte il materiale, dal tipo di sollecitazione, dai suoi valori
estremi, nonché dal limite di fatica. Il fattore più significativo è la finitura superficiale del
materiale impiegato. Le microcricche di fatica, di solito, hanno origine dalla superficie del
pezzo in corrispondenza di eccessiva microrugosità, intagli, zone filettate, fenditure per
chiavette non raccordate, fori, angoli acuti, ecc. Così nei limiti del possibile, vanno evitate,
attraverso un’attenta progettazione ed esecuzione dell’elemento strutturale, tutte queste
zone di concentrazione degli sforzi agenti, come sede preferenziale di innesco di rottura a
fatica. Il limite di fatica può essere accresciuto mediante l’indurimento superficiale
dell’elemento con trattamenti di diffusione (cementazione, nitrurazione) o meccanici
(pallinatura, sabbiatura, ecc.). Sul limite di fatica ha importanza fondamentale inoltre
l’aggressività dell’ambiente nel quale l’elemento (o la struttura) si trova ad operare, nel
senso che la sollecitazione a fatica può favorire la corrosione (corrosione a fatica).
80
Resistenza a fatica
La determinazione del limite di fatica viene fatta sperimentalmente su un provino di forma
e dimensioni standard, mediante prove dinamiche di resistenza che si avvalgono di
apposite macchine capaci di realizzare uno dei casi semplici di sollecitazione (trazione e
compressione, flessione o torsione). Tra le macchine più utilizzate,vi sono quelle per prove
di fatica a flessione rotante. In queste il provino, sollecitato da un carico che produce un
momento flettente costante, è tenuto in rotazione intorno al suo asse da un motore; nel
corso di tale rotazione le fibre del materiale, situate lungo la circonferenza esterna, sono
sottoposte ad uno sforzo massimo, oscillante con legge sinusoidale, passando, durante
un’intera rotazione, da uno stato di massima compressione ad uno di massima trazione.
Tale rotazione viene ripetuta sullo stesso provino parecchie migliaia di volte al minuto. Il
limite di fatica a flessione rotante viene determinato applicando a provini diversi carichi
decrescenti (e quindi momenti decrescenti) e contando in corrispondenza di questi il
numero delle rotazioni complete fino a rottura del provino. Molto importante è l’aspetto
che assume la superficie di frattura quando avviene la rottura del provino. Nella zona più
sollecitata della superficie si osservano, dopo un certo tempo, scorrimenti localizzati con
formazione di microprotuberanze e rientranze. Queste ultime diventano le zone di innesco
delle microcricche che avanzano per deformazione plastica localizzata. Si forma così una
superficie di rottura opaca, vellutata, più o meno liscia , sulla quale generalmente si notano
delle linee di andamento parallelo che, dal punto dove la frattura ha origine, proseguono,
ricoprendola completamente (zona di rottura per fatica propriamente detta) (figura 48).
Allo stadio di propagazione della microfessura segue quello della rottura di schianto del
provino, quando, per eccessiva riduzione di sezione, lo sforzo massimo applicato sulla
parte di sezione ancora intatta supera quello di rottura del materiale. Nell’ambito degli
4
6
organi meccanici il numero di cicli critico pericoloso è attorno a 10 ÷ 10 cicli per
ampiezza di sollecitazione costante, mentre sale a valori molto più elevati per ampiezza
variabile.
Il fenomeno della fatica non è visibile. In un organo non si sa cioè in genere quando si è
vicino al numero di cicli per il quale è stato progettato ed oltre il quale si potrebbe avere
rottura.
La fatica non si manifesta con fenomeni premonitori, nemmeno per i materiali duttili, il
cedimento statico dei quali invece comporta una grande deformazione plastica prima della
rottura e quindi la possibilità di accorgersi della rottura incipiente. La rottura a fatica
invece avviene in modo fragile anche per materiali duttili.
81
Resistenza a fatica
rottura
istantanea
linee di
riposo
Figura 48: Schema di superficie di frattura di un provino con le righe parallele della zona
di rottura per fatica propriamente detta [31].
4.2 CRITERI
DI
PROGETTAZIONE
E
VALORI
CARATTERISTICI
UTILIZZATI NELLA FATICA
Negli ultimi anni si sono sviluppati dei criteri di progettazione diversi:
♦ criterio safe life che è normalmente usato in campo meccanico;
♦ criterio fail safe che è un concetto di progettazione considerato più attendibile in campi
ad alto rischio e consiste nel seguire lo sviluppo della cricca, dopo che si è innescata,
cercando di determinare la vita residua.
Nel caso di pezzi senza effetto d’intaglio sollecitati ripetutamente nello stesso modo (ad
ampiezza costante) i parametri che servono per caratterizzare la fatica sono:
♦ il numero di cicli “n” a cui il pezzo è sottoposto;
♦ la modalità di variazione delle tensioni.
Normalmente si fa riferimento alle tensioni ingegneristiche, anche se in alcuni casi sarebbe
più corretto utilizzare le tensioni vere.
I valori caratteristici usati nei vari casi per definire il ciclo di fatica, possono essere [32] :
1) σ max , σ min ;
2) σ m , σ a ;
3) σ m , Δσ ;
4) σ a , rapporto di sollecitazione R =
σ min
.
σ max
82
Resistenza a fatica
A questo punto è indispensabile chiarire il significato dei simboli appena usati:
σ max + σ min
sollecitazione media
σm =
ampiezza
Δσ = σ a =
rapporto di carico
R=
2
σ max − σ min
2
σ min
.
σ max
Nel caso della fatica classica (in assenza di difetti) la caratterizzazione è abitualmente
effettuata nel modo 2) o in quello 4), mentre nel campo della meccanica della frattura (cioè
quando sono presenti dei difetti) la caratterizzazione è effettuata nel modo 3).
È consuetudine parlare di numero di cicli n (inteso come numero di onde complete) in caso
di fatica in controllo di forza, mentre si parla di “alternanze” o “inversioni”, del carico, n’
(inteso come numero di semionde, per cui n'= 2n ) se si è in fatica con controllo della
deformazione. In particolare le prove di fatica effettuate in controllo di tensione e con
sollecitazioni elastiche ricadono nel campo della fatica ad alto numero di cicli
( 5000 ≤ N ≤ 2 ⋅ 10 6 ), mentre le prove sono svolte in controllo di deformazione quando i
carichi agiscono in campo elasto-plastico e si cade nel campo della fatica oligociclica
( N p 5000 ).
4.3 DIAGRAMMA DI WOHLER
Fu l’ingegnere tedesco Wohler, attorno alla metà dell’800, che scoprì e cercò di affrontare
la rottura per fatica. Dai propri studi, effettuati per organi sottoposti ad ampiezza di
sollecitazione costante, egli ricavò un diagramma che prende il suo nome e che riporta in
ascissa il numero di cicli N che portano a rottura ed in ordinata l’ampiezza di sollecitazione
Δσ .
Il diagramma di Wohler dice che passando dal carico statico a quello alterno, la resistenza
di rottura σ R valida per il carico statico diminuisce man mano che aumenta il numero dei
cicli per stabilizzarsi dopo due milioni di cicli sul valore detto σ f o di resistenza a fatica,
tale valore è indicato, in letteratura, anche come Δσ la (limite di fatica alterno simmetrico),
che è il valore al di sotto del quale il materiale è capace di resistere indefinitamente alla
fatica.
83
Resistenza a fatica
la
log N
Figura 49: Diagramma di Wohler.
Di solito, quando ci si occupa di rottura per fatica, si usa il diagramma di Wohler σ a in
funzione del numero di cicli (figura 49), mentre nella meccanica della frattura si
sostituisce σ a con Δσ , il che è del tutto equivalente.
Per poter tracciare il diagramma di Wohler ci si riferisce ad un provino a sezione costante e
con sollecitazione monoassiale, il carico deve variare con legge armonica avente σ m = 0 ed
un rapporto di sollecitazione R =
σ min
= −1 .
σ max
Nel diagramma di Wohler la curva sarà limitata superiormente dal valore di σ a per cui la
σ max raggiunge il carico di rottura, poiché se il carico arriva al carico di rottura il pezzo si
rompe staticamente (figura 50).
Questo diagramma non è facile da riportare ed utilizzare a causa del suo andamento non
lineare e dell’ampiezza della scala delle ascisse, per tali motivi ed anche per semplificare la
curva, che in questo caso diventa una retta nel tratto inclinato, si usa una rappresentazione
doppio logaritmica con log 10 σ a sulle ordinate e log10 N sulle ascisse (figura 51).
La differenza più significativa tra i diagrammi di Wohler per i diversi materiali è
rappresentata dalla curva dopo il punto “G”. Mentre per gli acciai si ha un limite di fatica,
per alcuni materiali la retta continua a decrescere, anche se con pendenza minore; ciò
equivale a dire che in pratica alcuni materiali non presentano limite di fatica e quindi
qualsiasi ampiezza di oscillazione, anche la più piccola, può portare a rottura per N elevati.
Questo è il comportamento tipico delle leghe leggere.
84
Resistenza a fatica
a
R
S
R=-1
G
la
10
2 10 6
Figura 50: Curva di Wohler, limitata superiormente dalla tensione di rottura ed
inferiormente dal limite di fatica
log
a
R
S
andamento
schematico
andamento
reale
la
G
10
2 10 6
log N
Figura 51: Andamento reale (linea a tratti) ed andamento schematico (linea continua) della
curva di Wohler in un diagramma doppio logaritmico [32].
Si precisa che l’andamento di figura 51 è una schematizzazione e quindi la configurazione
reale della curva sarà molto probabilmente quella tratteggiata, che raccorda con continuità i
diversi tratti.
4.4 INTRODUZIONE ALLA MECCANICA DELLA FRATTURA
La meccanica classica segue un approccio alla fatica attraverso un criterio di punto,
mediante la relazione tra la vita a fatica e lo stato tensionale massimo. Tale approccio si è
dimostrato insufficiente per la spiegazione dei fenomeni che si hanno in corrispondenza di
difetti o di piccoli intagli in prossimità dei quali la teoria della meccanica del continuo
85
Resistenza a fatica
fornisce una soluzione degenere. La meccanica della frattura supera questo limite grazie ad
un approccio di campo secondo il quale attraverso un parametro si definisce non lo stato
tensionale puntuale, ma lo stato di sollecitazione di un intero campo [29]. Con questo
approccio è possibile tenere conto anche della ridistribuzione delle tensioni all’apice di una
cricca (intaglio) caricata che secondo la teoria della meccanica del continuo dovrebbe
avere un valore di tensione infinito, e quindi della plasticizzazione che ne consegue.
4.4.1 CENNI DI MECCANICA DELLA FRATTURA
I principi della meccanica della frattura permettono di affrontare il problema della "life
extention" in un pezzo meccanico, sollecitato ripetutamente. L'evoluzione della cricca
segue le successive fasi di nucleazione, crescita ed evoluzione a rottura.
La nucleazione avviene generalmente in corrispondenza della superficie, a causa di zone
critiche per particolarità geometriche o di discontinuità del materiale o di distribuzioni
delle tensioni.
La crescita delle microcricche formatesi con la nucleazione avviene ciclo dopo ciclo con il
meccanismo rappresentato in figura 52, la quale mostra come inizialmente si formi una
zona plasticizzata nella quale si verifica scorrimento e la formazione di nuova superficie
(fase di carico); successivamente avviene un arrotondamento dell'apice della microcricca e
quindi un suo avanzamento (fase di scarico).
δmin
σ
1
3
2
2
1
nuova
superficie
4
5
δmax
t
3
nuova
superficie
4
Δa
5
Figura 52: Meccanismo di avanzamento della cricca.
86
Resistenza a fatica
4.4.2 Effetto di chiusura
La propagazione delle cricche di fatica è dipendente dalle condizioni di applicazione del
carico. Mentre la frequenza ha una influenza modesta per prove effettuate in aria e per
K
P
valori compresi fra 1 e 100 Hz, il rapporto di carico R ( = min = min ) influenza
Pmax Kmax
notevolmente le curve di propagazione nel diagramma
da
da
- ΔK (
, velocità di
dN
dN
avanzamento della cricca; a, lunghezza cricca; N, numero di cicli; ΔK, ampiezza del fattore
di intensificazione degli sforzi). A causa della sollecitazione ciclica, il ΔK applicato varia
fra Kmax e Kmin. In realtà, a seguito di fenomeni di chiusura all'apice della cricca, il valore
del ΔKeff (ΔK effettivo) è minore del ΔK applicato. Questo effetto è noto come effetto di
chiusura ed è stato studiato da Elber [30].
Tale effetto è importante perché altera la relazione tra il ΔK calcolato (in base alla
sollecitazione e alla lunghezza della cricca) e quello misurato all'apice della cricca. Le
varie cause e meccanismi di tale effetto sono stati compresi solo parzialmente. Si ritiene
che l’effetto di chiusura sia influenzata dalla microstruttura, dal ΔK, dalla lunghezza della
cricca, dall'ambiente, dalle modalità di sollecitazione e dalla temperatura.
Le cause più importanti per l'effetto chiusura sono (figura 52):
1. La plasticizzazione del materiale nella regione in prossimità dell'apice della cricca.
Tale plasticizzazione comporta la formazione di uno sforzo di compressione all'apice
della cricca che aumenta il valore del Kmin reale.
2. La rugosità della superficie della cricca. Tale rugosità comporta, in corrispondenza dei
valori prossimi al Kmin, un contatto anticipato delle superfici di frattura, con una
sollecitazione di fatica che dal modo I puro diviene un modo misto I+II. Il modo misto
I+II implica un ΔKeff inferiore a quello applicato.
3. La formazione di ossidi sulla superficie della cricca causati dall'interazione del
materiale con l'ambiente. La presenza di questi ossidi impedisce una completa chiusura
dell'apice della cricca in corrispondenza del Kmin, con il ΔKeff che risulta essere
inferiore a quello applicato.
87
Resistenza a fatica
Kmax
Kop
Kmin
(A)
(B)
(C)
ΔKeff=Kmax-Kmin
(D)
ΔKeff=Kmax-Kop
Figura 53: Meccanismi di chiusura della cricca dovuti a: (A) Apertura teorica, (B)
Plasticizzazione, (C) Prodotti di corrosione, (D) Rugosità.
4.4.3 Modelli di propagazione di cricche di fatica
I risultati di una prova di propagazione di cricca di fatica in un diagramma
da
- ΔK si
dN
distribuiscono con un andamento che, solitamente, può essere interpolato utilizzando una
curva di tipo sigmoidale (figura 54).
In questo diagramma si possono individuare tre zone:
I.
Zona di soglia; in tale zona, delimitata da un ΔKth (dove “th” significa “threshold"
cioè soglia) al di sotto del quale, la velocità
da
con cui si propaga la cricca è
dN
nulla.
II.
Zona di propagazione stabile della cricca; in tale zona si ha un legame lineare tra
logΔK e log
III.
da
.
dN
Zona di rottura di schianto; in tale zona, delimitata da ΔKIC statico del materiale, il
ΔK (campo delle tensioni) della cricca è talmente elevato che la velocità
da
tende
dN
all’infinito e quindi si ha rottura di schianto di tipo statico.
88
Resistenza a fatica
log
da
dN
(m/ciclo)
I
II
III
logΔK( MPa m )
ΔKth
ΔK=KIC
Figura 54: Diagramma bilogaritmico della velocità di propagazione della cricca (
da
) in
dN
funzione del campo di tensione (ΔK).
In fase di progetto e controllo occorre fissare dei criteri operativi:
•
Non ammettere alcuna cricca;
•
Ammettere cricche che generano ΔK>ΔKth;
•
Ammettere cricche nella zona II, però occorre seguire la loro crescita con metodi non
distruttivi;
•
Si eseguono dei controlli non invasivi ad intervalli di tempo prefissati e verificare che
la cricca, qualora si sviluppasse, non porti a rottura il pezzo.
4.4.4 Modello di Paris
Nella zona II di propagazione è valida una relazione empirica nota come legge di Paris
[31]:
log
da
= log C + m log ΔK
dN
(57)
dove
“m” è il coefficiente angolare di figura 55.
Tale relazione può essere scritta come:
da
= C (ΔK ) m
dN
(58)
dove:
“C” ed “m” (generalmente 2<m<4) sono costanti dipendenti dal materiale, dalla
microstruttura e dalle condizioni ambientali.
89
Resistenza a fatica
Il modello di Paris permette di interpolare i risultati nella zona II e di ottenere la curva:
log
da
dN
(m/ciclo)
I
II
III
m
LogΔK ( MPa m )
ΔKth
ΔKmax=(1-R)KIC
Figura 55: Curva di Paris
4.4.5 Meccanica della frattura e fenomeni di fatica
Le prove di fatica sono state effettuate in aria e a temperatura ambiente su provini CT
(Compact Tensile) [32]. La geometria del provino è mostrata nelle figure 56 e 57. Il
precriccaggio, mostrato in figura 57, consiste nel sollecitare il provino con una serie di
cicli a fatica al fine di ottenere una propagazione della cricca di 2 mm. Il carico utilizzato
in questa fase deve essere necessariamente inferiore ai valori oltre i quali si otterrebbe una
elevata plasticizzazione all'apice della cricca con conseguente rallentamento della
propagazione della frattura stessa.
Il provino deve soddisfare vari requisiti:
•
E' necessario che la lunghezza dell'intaglio a0 sia almeno di 0.2W, affinché si possa
evitare che il ΔK sia influenzato dalle piccole variazioni di dimensione e posizione dei
fori di afferraggio.
Lo spessore B deve essere compreso nell'intervallo
•
W
W
≤B≤ .
20
4
Le dimensioni del provino devono rispettare la seguente relazione empirica :
⎛ 4 ⎞⎛ K
(W − a) ≥ ⎜ ⎟⎜ max
⎝ π ⎠⎜⎝ σ ΥS
⎞
⎟
⎟
⎠
2
(59)
(W-a)=lunghezza del provino non ancora fratturato.
σΥS = scostamento dello 0.2 % dello sforzo indotto nel provino,
misurato alla stessa temperatura a cui viene effettuata la prova.
90
Resistenza a fatica
Figura 56: Provino standard CT.
Figura 57: Caratteristiche dell'intaglio e della cricca ottenuta tramite precriccaggio.
4.4.6 Apparato di prova
Le prove di fatica possono essere effettuate considerando diversi parametri:
1. Tipo di sollecitazione: si possono avere sollecitazioni di
•
Trazione - compressione
•
Flessione nel piano rotante
•
Rotazione
•
Torsione
•
Flessione
•
Varie combinazioni
91
Resistenza a fatica
2. Modalità di variazione della sollecitazione: si possono considerare sollecitazioni di
vario tipo
•
Costante
•
Variabile
•
Random
3. Funzione della tipologia dell’elemento in prova: si possono prendere in
considerazione provini
•
Provini standard
•
Provini di strutture complesse.
4. Sistema di applicazione del carico: possono essere
•
Sistemi meccanici o elettromeccanici (sono poco adatti al controllo di deformazione)
•
Sistemi idraulici (permettono un buon controllo in deformazione).
Nel nostro caso è stata utilizzata una macchina idraulica servoidraulica INSTRON
8501, controllata mediante calcolatore.
Figura 58: Macchina INSTRON 8501.
Su tale apparato si possono svolgere molteplici prove, dalle più semplici prove a trazione e
compressione a quelle più impegnative come le prove a fatica. La macchina è composta dal
telaio, dall'attuatore, dalla cella di carico e da un sistema elettronico di controllo e di
comando.
92
Resistenza a fatica
Il telaio è una struttura rigida che non deve deformarsi durante la prova per non inficiare i
risultati. Esso è costituito da una base che funge da attuatore e da due martinetti idraulici
che sorreggono una trave, su cui
è attaccata la cella di carico.
La cella di carico è il vero e proprio strumento di misura. Infatti l’attuatore esercita una
forza sul provino che è rilevata dalla cella di carico, la quale manda un segnale al
calcolatore. Se la forza rilevata non è quella impostata precedentemente, allora la macchina
modifica i suoi parametri per riportare il sistema in equilibrio. Tutto ciò avviene
iterativamente continuamente. L’attuatore è il sistema che imprime la forza al provino.
Esso scarica la sua forza attraverso due martinetti pneumatici, che agiscono lungo l’asse
dei cilindri. L'attuatore è alimentato da una pompa mediante un circuito idraulico ad olio.
Tale pompa lavora sommersa per assicurare un continuo flusso. Il fluido pneumatico è
raffreddato da uno scambiatore di calore ad acqua corrente. La macchina è collegata al
provino tramite degli afferraggi (Figura 69). La geometria degli afferraggi è funzione della
lunghezza del provino (W), e dal suo spessore (B). Il gioco tra spinotto e il foro
dell’afferraggio è imposto per evitare carichi non lineari dovuti alla presenza di attrito del
provino. E’ fondamentale che ci sia un allineamento perfetto tra i due afferraggi per non
falsare il carico applicato.
Figura 59: Afferraggi per provino CT.
93
Materiali investigati
CAPITOLO V
MATERIALI: GHISE SFEROIDALI INVESTIGATE
5.1 COMPOSIZIONI CHIMICHE E TRATTAMENTI TERMICI
In questo lavoro di tesi sono state considerate sei differenti ghise sferoidali, tre delle quali
caratterizzate da una composizione chimica as cast comune, ma con microstrutture
differenti ottenute mediante trattamenti termici.
Tabella 3: Composizione chimica ghisa sferoidale as cast
C
Si
Mn
S
P
Cu
Cr
Mg
Sn
3,70
2,70
0,28
0,010
0,032
0,14
0,063
0,050
0,036
Ghisa sferoidale EN GJS 350-22, 100% ferrite, di seguito indicata come GSA, ottenuta
mediante il seguente trattamento termico di ricottura :
•
Riscaldamento in forno fino a 750°C
•
Permanenza per 2h a 750°C
•
Raffreddamento 50°C/h fino a 500°C
•
Permanenza a 500°C per 2h
•
Raffreddamento in aria calma
Ghisa sferoidale EN GJS 700-2, 100% perlite, di seguito indicata come GSB, ottenuta
mediante il seguente trattamento termico di normalizzazione:
•
Riscaldamento in forno fino a 890°C
•
Permanenza per 2,5h a 890°C
94
Materiali investigati
•
Raffreddamento 50°C/h fino a 500°C
•
Raffreddamento in aria forzata
Ghisa sferoidale EN GJS 500-7: 50% ferrite, 50% perlite, di seguito indicata come GSC,
ottenuta as cast (Tabella 1).
Ghisa sferoidale EN GJS 450-10, 70% ferrite- 30% perlite di seguito indicata come GSD,
la cui composizione chimica è riportata in tabella 4.
Tabella 4: Composizione chimica ghisa sferoidale EN GJS 450-10 (GSD)
C
Si
Mn
S
P
Cu
Cr
Mg
Sn
3,66
2,72
0,18
0,013
0,021
-
0,028
0,043
0,021
Successivamente a partire da una ghisa ferrito-perlitica con un tenore più elevato di Mn,
sono stati effettuati due differenti trattamenti di austempering, ottenendo in entrambi i casi
una struttura completamente bainitica, ma con differenti livelli di degenerazione degli
elementi di grafite.
Nel caso della ghisa austemperata caratterizzata da una maggiore degenerazione degli
elementi di grafite (ghisa qui di seguito denominata ADIA) il trattamento è stato il
seguente:
-
riscaldamento in forno a 910°C (70 minuti);
-
raffreddamento in forno in bagno di sali fusi (2 ore a 370°C e successivamente 60 s
a 320°C);
-
raffreddamento in aria fino alla temperatura ambiente.
Nel caso della ghisa austemperata caratterizzata da una minore degenerazione degli
elementi di grafite (ghisa qui di seguito denominata ADIB) il trattamento è stato il
seguente:
-
riscaldamento in forno a 910°C (70 minuti);
-
raffreddamento in forno in bagno di sali fusi (1 ora a 370°C e successivamente 60 s
a 300°C);
-
raffreddamento in aria fino alla temperatura ambiente.
Tabella 5: Ghisa sferoidale austemperata GGG 70BA (completamente bainitica)
C
Si
Mn
Mo
Ni
Sn
S
3,61
2,23
0,32
0,42
0,52
0,045
0,015
95
Materiali investigati
5.2 MICROSTRUTTURE
Per l’osservazione al microscopio ottico sono stati ricavati dai provini CT, dei campioni a
forma di parallelepipedo avente un’area pari circa ad 1 cm2. In seguito dopo aver riposto i
campioni in resina, con opportuna macchina inglobatrice a caldo, è stata lucidata la
superficie a contatto con il microscopio ottico in modo da non presentare sfaccettature.
Successivamente i campioni sono stati attaccati chimicamente con una soluzione di 1 ml di
HNO3 e 50 ml di etanolo per una durata di 5 s. Scelto l’ingrandimento (100X)
dall’osservazione al microscopio ottico si evidenziano le microstrutture di seguito riportate
(Figure 61-67).
Figura 61: Ghisa sferoidale EN GJS 350-22 (GSA)
Figura 62: Ghisa sferoidale EN GJS 700-2 (GSB)
96
Materiali investigati
Figura 63: Ghisa sferoidale EN GJS 500-7 (GSC)
Figura 64: Ghisa sferoidale EN GJS 450-10 (GSD)
Con la stessa procedura è possibile osservare al microscopio ottico la microstruttura della
ghisa austemperata. Dall’osservazione al microscopio ottico è possibile notare come al
variare del trattamento termico, per la medesima composizione chimica, può essere
presente una maggiore degenerazione dei noduli di grafite, come mostrato in figura 67.
97
Materiali investigati
Figura 65: Ghisa sferoidale austemperata GG70BA (ADIA)
Figura 66: Ghisa sferoidale austemperata GG70BA (ADIB)
Dal momento che le caratteristiche geometriche degli sferoidi di grafite, insieme alla
microstruttura della matrice determinano le proprietà meccaniche delle ghise sferoidali in
questo lavoro di tesi è stato dapprima affrontato il problema dell’identificazione degli
sferoidi di grafite, in quanto gli stessi possono agire da “crack arresters”, permettendo di
ottenere valori di duttilità e di tenacità di assoluto interesse per impieghi per i quali sono
previste sollecitazioni elevate, anche variabili nel tempo. Ovviamente tale risultato viene
ottenuto solo nel caso di una buona nodularizzazione della grafite medesima. La
determinazione dei parametri morfologici di interesse è stato affrontato utilizzando
98
Materiali investigati
dapprima le reti neurali e successivamente per la caratterizzazione della microstruttura è
stata utilizzata la tecnica di segmentazione mediante contorni attivi.
Figura 67: Ghisa sferoidale austemperata GGG70BA (ADIA)
99
Metodologie sperimentali
CAPITOLO VI
METODOLOGIE SPERIMENTALI
6.1 DETERMINAZIONE DEI PARAMETRI MORFOLOGICI DI INTERESSE
NELLE GHISE SFEROIDALI.
Le ghise sferoidali sono fondamentalmente delle leghe ternarie Fe-C-Si nelle quali i tenori
di carbonio e di silicio sono compresi rispettivamente fra 3,5-3,9% e 1,8-2,8%. La scelta
della composizione chimica è generalmente determinata dalla dimensione del getto e dalle
proprietà meccaniche desiderate. Le particelle di grafite sono presenti sotto forma di noduli
e la loro formazione e controllo sono determinati dalla purezza della lega e dall’aggiunta di
elementi sferoidizzanti [1]. I noduli di grafite nucleano nel liquido solitamente in
corrispondenza di vari tipi di inclusioni (ad esempio MgS, CaS, SrS, MgO etc., ma è stata
osservata la nucleazione di sferoidi di grafite anche nel ferro ultra puro), e crescono per
diffusione allo stato solido del carbonio attraverso il guscio di austenite che viene a
formarsi intorno al nucleo [34, 35]. Le caratteristiche geometriche degli sferoidi di grafite,
insieme alla microstruttura della matrice determinano le proprietà meccaniche delle ghise
sferoidali. In particolare gli sferoidi possono agire come “crack arresters”, permettendo di
ottenere valori di duttilità e di tenacità di assoluto interesse per impieghi per i quali sono
previste sollecitazioni elevate, anche variabili nel tempo. Ovviamente tale risultato viene
ottenuto solo nel caso di una buona nodularizzazione della grafite medesima. Una sua
degenerazione può altresì implicare un indebolimento della matrice metallica, con gli
elementi di grafite che non agiscono più come “crack arresters”, ma, piuttosto, possono
generare cricche secondarie [36].
100
Metodologie sperimentali
Le caratteristiche geometriche dei noduli sono analizzate in campo industriale secondo la
normativa ASTM [32] o normative analoghe: le procedure proposte essenzialmente
consistono in una analisi semi-quantitativa della dimensione, grado di nodularizzazione e
distribuzione degli sferoidi di grafite, in cui l’esperienza e la sensibilità dell’operatore
svolgono un ruolo importante. Attualmente, grazie al supporto di tecniche software di
elaborazione delle immagini, sono state implementate diverse procedure in grado di
ottenere da una determinata immagine numerosi parametri, di effettuare misurazioni e di
eseguire calcoli statistici su un gran numero di osservazioni, applicando le procedure
proprie della metallografia quantitativa. Questa consente un approccio quantitativo e
statistico alla determinazione di grandezze quali, ad esempio il numero di particelle
presenti per unità di volume, la dimensione dei grani, la frazione di volume delle fasi
presenti nel provino.
Nel caso dell’analisi quantitativa degli sferoidi, sono stati proposti numerosi fattori di
forma [7], fra cui il fattore di forma SAA, definito come il rapporto fra l’area della sezione
del nodulo S e l’area del cerchio che circoscrive il nodulo medesimo S0, risulta essere fra i
più utilizzati [37]. Tale parametro però riesce solo a descrivere il livello di
nodularizzazione della sezione, ma non il grado di rugosità della sezione medesima.
In questo lavoro di tesi il problema dell’identificazione e della caratterizzazione degli
sferoidi di grafite e della distribuzione della matrice metallica nelle ghise sferoidali è stato
affrontato utilizzando dapprima le reti neurali e successivamente applicando la tecnica di
segmentazione mediante contorni attivi [38, 39]. Questa è una tecnica di analisi delle
immagini che permette di separare gli elementi di interesse dallo sfondo e di misurarne le
caratteristiche morfologiche.
6.1.1 Analisi metallografia: applicazioni reti neurali
Negli ultimi anni le reti neurali sono state impiegate con risultati interessanti in molti
campi, in particolare nell’analisi di immagini mediche, nel riconoscimento di oggetti e
nell’analisi di testi; solo recentemente le reti neurali sono state applicate nell’analisi della
microstruttura dei materiali [38-40]. Nel caso delle ghise sferoidali, le immagini ricavabili
dalla analisi metallografica al microscopio ottico mostrano, oltre agli sferoidi, profili
irregolari e artefatti dovuti alla procedura di acquisizione, che devono essere distinti dagli
elementi di interesse. Si propone una procedura di identificazione basata sulle reti neurali
in grado di riconoscere i profili relativi agli elementi di grafite. L’addestramento viene
101
Metodologie sperimentali
effettuato mediante un alfabeto di strutture locali tipiche; la rete così addestrata è stata
quindi utilizzata su immagini ottenute da campioni metallografici ricavati da differenti
ghise sferoidali ferrito-perlitiche. La procedura proposta risulta robusta rispetto agli
artefatti.
L’osservazione al microscopio ottico di campioni di ghisa sferoidali preparati
metallograficamente (ma non attaccati) produce immagini simili a quella riportata in
figura 68. Gli elementi grafici di interesse sono gli sferoidi che corrispondono ai noduli di
grafite della ghisa e lo sfondo che costituisce la matrice; lo sfondo può essere sede di
artefatti dovuti principalmente ad una non perfetta preparazione del provino, nonchè alla
presenza nella sezione effettuata di inclusioni ed impurezze.
Figura 68: Immagine ottenuta al microscopio ottico di un campione di ghisa sferoidale
preparato metallograficamente (ma non attaccato).
L’immagine digitale ottenuta dal microscopio ottico è rappresentata da una matrice Y di
numeri interi nella scala [ 0, 255] (8 bit di codifica) che sono il livello di grigio quantizzato
del provino analizzato. La dimensione M × N della matrice Y dipende dalla risoluzione
del sistema di acquisizione.
La prima difficoltà che si incontra nell’analisi automatica di un’immagine del tipo riportato
nella figura 68 consiste nel separare gli oggetti di interesse dallo sfondo e dagli artefatti;
infatti, nonostante l’immagine appaia, ad una ispezione visiva, di buona qualità, il segnale
è abbastanza irregolare. La figura 69 rappresenta l’andamento del livello di grigio della
riga 300 del segnale della figura 68, dove non è di immediata individuazione il contorno
dell’oggetto e le sue parti omogenee.
Generalmente, il riconoscimento di oggetti in una scena viene ottenuto rilevando i pixel di
contorno che separano i vari oggetti dallo sfondo; gli algoritmi proposti si basano più o
102
Metodologie sperimentali
meno direttamente sul calcolo approssimato della derivata prima e seconda del livello di
grigio, in quanto un modello semplificato del segnale ne prevede una brusca variazione
quando si attraversa una linea di contorno [40]. Tuttavia la figura 69 evidenzia come tale
assunzione sia in questo caso inadeguata in quanto si hanno brusche variazioni del segnale
anche in zone omogenee determinate dall’interno degli oggetti e dallo sfondo. In questi
casi gli algoritmi di stima dei contorni basati sul calcolo delle derivate fanno ricorso a
tecniche di regolarizzazione (filtraggio) del segnale e necessitano inoltre di opportuni test
(operazioni di soglia, test statistici) per ridurre al minimo l’incidenza di rilevamenti spuri.
Come ultima osservazione, vale la pena di notare che tali metodi risultano efficaci per
strutture locali del contorno assimilabili ad un gradino; strutture in cui il contorno presenta
punti angolosi o cuspidi comportano un notevole aumento di complessità dell’algoritmo.
In questo lavoro di tesi è presentata una procedura di riconoscimento degli sferoidi
basata sull’impiego di una rete neurale che sia in grado di evidenziare la struttura locale
dell’immagine distinguendo le zone omogenee sia dello sfondo che dell’interno dei noduli
di grafite dalle zone di contorno. La capacità delle reti neurali di classificare oggetti
differenti appartenenti ad un certo insieme (alfabeto ammissibile) permette di superare i
problemi connessi alla irregolarità del segnale.
Figura 69: Andamento del livello di grigio della riga 300 del segnale della figura 68.
6.1.2 Reti neurali: struttura locale dell’immagine e alfabeto di addestramento della
rete.
Le reti neurali artificiali (RNA) sono state introdotte per la prima volta nel 1943, ad opera
del neurofisiologo Warren McCulloch e del matematico Walter Pits, allo scopo di
riprodurre i processi di generalizzazione e di addestramento tipici del cervello umano.
Verso la fine degli anni ’70 è emerso un rinnovato interesse verso le reti neurali ed oggi
103
Metodologie sperimentali
molteplici sono i campi applicativi: il controllo dei processi industriali, i problemi di
previsione e di validazione dei dati, di analisi delle immagini, di classificazione,
applicazioni alle telecomunicazioni e nell’ambito biomedico, per citare solo alcuni esempi,
[25-28]. L’aspetto più interessante per le applicazioni di nostro interesse risiede nella
capacità di eseguire la classificazione degli elementi appartenenti ad un insieme dato e nel
dettaglio si rimanda al capitolo III.
L’obiettivo consiste nell’ottenere un’immagine risultante costituita dagli sferoidi, aventi un
livello di grigio pari a zero (nero), su uno sfondo costante di livello pari a uno (bianco);
tale tipo di immagine è quella richiesta da procedure standard (ad esempio il Toolbox di
Image Processing del Matlab) per poter numerare i singoli noduli di grafite e misurarne le
caratteristiche morfologiche utili per valutare la qualità del materiale analizzato.
A tale scopo è stato definito un alfabeto di strutture locali di segnale tipiche che tiene conto
delle regioni omogenee e delle varie configurazioni di contorno [29]. Gli elementi
dell’alfabeto sono riportati nella figura 70.
Figura 70: Elementi dell’alfabeto di strutture locali di segnale tipiche.
Tutte le celle sono costituite da matrici di dimensione p × q (nel caso di Figura 3
p = q = 3 ): le celle della prima riga danno la struttura elementare dello sfondo e
dell’interno degli sferoidi. Le celle nelle righe 2 e 3 rappresentano alcune strutture
elementari di zone di contorno. Tale alfabeto può essere arricchito con strutture locali di
zone di contorno più articolate senza aumentare la complessità della procedura. In questo
lavoro ci si è limitati all’alfabeto della figura in quanto ha fornito risultati soddisfacenti sul
tipo di dati analizzati.
104
Metodologie sperimentali
La procedura di training della rete neurale è stata effettuata in tre passi, come suggerito
dalla teoria generale per le applicazioni di classificazione e pattern recognition:
•
addestramento della rete con alfabeto rappresentato nella figura 70;
•
un nuovo addestramento con versioni perturbate dell’alfabeto (le perturbazioni
consistono nell’aggiunta di un disturbo di natura statistica e una diminuzione del
contrasto mediante filtraggio passa-basso (blurring));
•
ultima sessione di addestramento nuovamente con l’alfabeto di figura 70.
A questo punto l’immagine da analizzare viene divisa in celle di dimensione p × q ;
ciascuna cella viene presentata all’ingresso della rete per il riconoscimento della eventuale
struttura di contorno presente (elementi 3-10 dell’alfabeto) o di zona omogenea
appartenente allo sfondo o all’interno degli sferoidi (elementi 1 e 2 dell’alfabeto).
Tuttavia, la rete così addestrata, applicata alle immagini sperimentali, non sempre fornisce
in uscita elementi del target scelto; per questo motivo è necessario elaborare ulteriormente
l’uscita prodotta dalla rete mediante un algoritmo di decisione che seleziona all’interno
dell’insieme obiettivo l’elemento che più si avvicina all’uscita fornita dalla rete. In
generale questo passo può essere implementato da un ulteriore strato della rete; in questo
caso è stato applicato un semplice algoritmo di minima distanza fra l’uscita della rete e gli
elementi dell’insieme obiettivo. Nel seguito si farà riferimento al termine di rete
intendendo anche questa seconda elaborazione.
6.1.3 Analisi metallografia: segmentazione mediante contorni attivi
Per un generico provino metallografico, il dato sperimentale è costituito da un’immagine
digitale a 8 bit rappresentata mediante una matrice di numeri interi compresi tra 0 e 255,
che codificano 256 livelli di grigio convenzionalmente compresi tra 0 e 1; il generico
elemento della matrice fornisce il valore del livello di grigio nel pixel corrispondente
dell’immagine. Tale matrice quindi è una rappresentazione digitalizzata e quantizzata del
segnale fornito dal microscopio ottico. L’analisi automatica delle immagini dei provini
metallografici presenta notevoli difficoltà. Gli elementi grafici di interesse (noduli di
grafite, zone dell’attacco chimico, matrice metallica) non sono in generale separati
nettamente in modo tale da poterli individuare mediante semplici operazioni di soglia. In
tale modo si cerca di individuare i differenti elementi grafici in base al valore del livello di
grigio che corrisponde loro: per esempio i noduli di grafite sono certamente le zone più
105
Metodologie sperimentali
scure dell’immagine del provino, figura 71 a). Questi quindi potrebbero essere facilmente
individuati fissando una soglia ad esempio di 0.3 e classificare i pixel il cui valore sia non
superiore a 0.3 come pixel che appartengono agli sferoidi; in questo modo si effettuerebbe
una segmentazione dell’immagine originale in due livelli di segnale: nero (sferoidi) e
bianco (sfondo). Tuttavia, se la soglia scelta va bene per un provino, il più delle volte deve
essere aggiornata quando si cambia provino. La segmentazione a soglia, seppur molto
semplice ed efficiente, è tuttavia euristica nella scelta dei valori di soglia e richiede
comunque l’intervento dell’esperto per l’analisi d’immagine. Inoltre, nell’immagine sono
presenti vari tipi di degradazione; alcuni sono legati alla preparazione del provino, come i
graffi e aloni dovuti all’ossidazione del provino e alla presenza di pulviscolo; gli altri tipi
sono essenzialmente legati al processo di acquisizione dell’immagine. Nonostante le
immagini dei provini appaiano, ad una ispezione visiva, di buona qualità (Figura 71a)), il
segnale è fortemente irregolare (Figura 71b)). Ne consegue una accentuazione dei limiti
del metodo a soglia, e la conseguente necessità di modificare la soglia per il medesimo
campione analizzato, al variare della zona ispezionata. L’individuazione automatica degli
elementi grafici, utili alla valutazione delle caratteristiche meccaniche del materiale in
esame, deve essere effettuata con una tecnica molto più sofisticata di segmentazione [40].
Questa consiste nella riduzione del numero dei livelli di grigio senza alterare il contenuto
informativo dell’immagine, in particolare senza alterare la forma degli elementi grafici di
interesse; si ottiene in tale modo un’immagine estremamente più semplice dove gli
elementi di interesse sono ben separati. Il numero di livelli di grigio dell’immagine
segmentata dipende dal livello di dettaglio dell’informazione che si intende preservare;
usualmente due livelli (immagine binarizzata in bianco e nero, Figura 71c)) o quattro
livelli (Figura 71d)) sono adeguati per il tipo di analisi richiesta in metallurgia.
La tecnica utilizzata è basata su un metodo variazionale che va sotto il nome di
segmentazione mediante contorni attivi [41, 42]: una curva iniziale di forma qualunque
viene fatta evolvere sul piano dell’immagine in modo tale da collocarsi sulle frontiere degli
oggetti di interesse, che quindi possono essere separati gli uni dagli altri.
Con riferimento alla figura 72, la curva iniziale divide l’immagine in due zone, la zona
interna alla curva e quella ad essa esterna. La curva viene via via deformata in modo tale
che all’interno di ciascuna delle due zone il livello di grigio sia il più possibile omogeneo,
mentre risulti molto differente passando da una regione all’altra.
106
Metodologie sperimentali
a)
b)
1-st level segmentation
2-nd level segmentation
50
50
100
100
150
150
200
200
250
250
300
300
350
350
400
400
450
450
500
500
100
200
300
400
500
600
700
c)
100
200
300
400
500
600
700
d)
Figura 71. a) Immagine originale di un provino metallografico (EN GJS 450-10); b)
andamento del livello di grigio di una riga dell’immagine a); c) segmentazione con 2
livelli; d) segmentazione con 4 livelli.
In figura 72 h) la configurazione finale definisce la segmentazione ottima che separa
totalmente lo sferoide dallo sfondo; tale configurazione finale, e quindi la segmentazione
ottimale (figura 72i)), non dipende dalla scelta iniziale della curva che evolve, e dipende
esclusivamente dalla distribuzione del livello di grigio dell’immagine stessa. La procedura
non richiede né aggiornamenti al variare delle immagini da elaborare né interventi da parte
dell’esperto, per cui lo stesso algoritmo fornisce la segmentazione ottima per ogni
immagine elaborata anche a fronte dei vari livelli di degradazione presenti. La convergenza
dell’algoritmo è molto rapida, e può essere implementato su un personal computer di
normali prestazioni.
I dettagli tecnici possono essere consultati in [42] dove è presentata una procedura
innovativa di segmentazione con i contorni attivi; per comodità una schematizzazione della
procedura è riportata in Appendice al paragrafo 6.5.
La procedura proposta è stata applicata sia considerando il problema della
caratterizzazione della matrice metallica, considerando ghise sferoidali a matrice ferritoperlitica, sia analizzando il problema della caratterizzazione della eventuale degenerazione
dovuta a trattamento termico degli elementi di grafite considerando due differenti ghise
107
Metodologie sperimentali
sferoidali austemperate. Nel caso delle ghise austemperate, i risultati ottenuti con la
procedura di segmentazione mediante contorni attivi sono stati confrontati con i risultati
delle prove di propagazione di cricca di fatica, in modo da poter sia accertare la sensibilità
della procedura proposta, sia quantificare l’influenza dei parametri microstrutturali sul
comportamento meccanico.
a)
b)
c)
d)
e)
f)
g)
h)
i)
Figura 72 a)-h) evoluzione del contorno attivo dalla configurazione arbitraria iniziale a
quella finale; i) segmentazione a 2 livelli.
6.1.3.1
Procedura sperimentale
Per quanto riguarda l’analisi della matrice metallica, sono state considerate due ghise
sferoidali ferrito-perlitiche caratterizzate dalla composizione chimica riportata nelle Tab
V-3,4. La valutazione delle frazioni di ferrite e perlite riportata è stata inizialmente valutata
visivamente per confronto.
Le ghise austemperate utilizzate per la valutazione della degenerazione degli sferoidi sono
invece caratterizzate dalla medesima composizione chimica riportata nella TabV-5. A
partire da una ghisa ferrito-perlitica con un tenore più elevato di Mn, sono stati effettuati
108
Metodologie sperimentali
due differenti trattamenti di austempering, ottenendo in entrambi i casi una struttura
completamente bainitica, ma con differenti livelli di degenerazione degli elementi di
grafite di seguito denominate ADIA ed ADIB.
6.2 AVANZAMENTO DELLA CRICCA DI FATICA IN ARIA: PROCEDURA DI
PROVA
Le prove di propagazione di cricche di fatica sono state effettuate in aria utilizzando
provini CT (Compact Type) di 11 mm di spessore, secondo la normativa ASTM E647
[32].La misura dell’avanzamento della cricca di fatica è stata effettuata mediante l’utilizzo
di un estensimetro meccanico che ha permesso di calcolare, attraverso le formule
interpolanti previste dalla normativa UNI 9159, la lunghezza della cricca in tempo reale. In
figura 73 si riporta il provino montato sulla macchina di prova equipaggiato con
estensimetro meccanico. La macchina utilizzata è una INSTRON 8501 da 100kN, azionata
mediante pompa idraulica separata e controllata tramite PC. Prima di effettuare le prove di
fatica, è stato effettuato un precriccaggio al fine di ottenere una cricca con basso raggio
all’apice. A questo punto i provini sono stati sottoposti a fatica applicando una
sollecitazione con una forma d’onda sinusoidale, in condizioni di ampiezza di carico
costante e considerando tre differenti rapporti di carico (R = Pmin/Pmax = 0,1; 0,5; 0,75).
Le prove di propagazione sono state svolte in aria nelle condizioni di laboratorio, con una
frequenza di sollecitazione pari a 20 Hz . La misura dell’avanzamento della cricca è stato
effettuato mediante estensimetro meccanico, e controllato mediante microscopio ottico
(40x).
I risultati ottenuti nel diagramma da/dN-ΔK sono stati interpolati nello stadio lineare di
propagazione utilizzando la relazione di Paris [6]:
da/dN = C ΔKm
dove C ed m sono parametri di interpolazione.
109
Metodologie sperimentali
Figura 73: Apparecchiatura utilizzata per il precriccaggio e per le prove di fatica in aria.
6.3 ANALISI DELLE SUPERFICI DI FRATTURA
Tutte le superfici di frattura ottenute sono state analizzate mediante un microscopio
elettronico a scansione (SEM). Inoltre su ogni provino è stata effettuata un’analisi al
microscopio ottico (LOM) del profilo di avanzamento della cricca. Successivamente a
partire dalle immagini stereoscopiche ottenute al SEM è stata realizzata una ricostruzione
tridimensionale dei profili di frattura in modo da effettuare un’analisi quantitativa
dell’influenza della degli sferoidi di grafite nei modelli di distacco (debonding) duttile e
fragile per diverse microstrutture.
6.3.1
Metodi di analisi al SEM e al LOM
Dopo la prova di fatica, ciascuna superficie di frattura, dopo permanenza in alcool etilico
per almeno 3 minuti in ultrasuoni ed essiccate, è stata posta all’interno del SEM. Le
osservazioni sono state effettuate alle tensioni di 25 e di 30,5 kV ed utilizzando spot da
50nm. Tutte le frattografie sono state effettuate ponendo la superficie con la direzione di
propagazione della cricca da sinistra verso destra. Per analizzare i profili di frattura al
microscopio ottico, le superfici sono state preventivamente protette mediante nichelatura
chimica, effettuata immergendo una metà del provino per due ore in soluzione di iposolfito
di sodio (160g/l) e di fosfato di nichel (90 g/l) a 89°C. La soluzione pari a 500 ml si è resa
costante nelle due ore con aggiunta di acqua distillata. Quindi è stato possibile effettuare il
taglio in modo da ottenere la superficie mediana del provino, come riportato in Figura 74.
La superficie ottenuta è stata inglobata mediante resina termoindurente ed è stata
successivamente attaccata.
110
Metodologie sperimentali
da/dN
In aria
ΔK
ΔK2
ΔK3
Distanza dalla
superficie di frattura
ΔK1
Figura 74: Modalità di taglio del provino CT ed analisi superficie frattura.
6.3.2
Ricostruzione tridimensionale dei profili di frattura
Le immagini stereoscopiche sono le immagini di partenza per la creazione di un modello
tridimensionale digitale DEM. Per ricostruire le immagini stereoscopiche effettuate al
SEM è stato utilizzato un programma chiamato Alicona MeX . Lo scopo di tale
programma è quello di ricreare un’immagine tridimensionale partendo da un’immagine in
due dimensioni, cioè trasforma un dispositivo di misurazione in una rappresentazione in
3D. Alicona MeX descrive la topografia della superficie del provino e permette l’analisi di
immagini tridimensionali, partendo direttamente dalle immagini ottenute al SEM; è un
prodotto software per computare ed analizzare i modelli digitali DEM partendo dalle
immagini stereoscopiche del microscopio elettronico a scansione SEM. Alicona MeX apre
la terza dimensione, per determinare la topografia delle microstrutture e per poter misurare
i profili, i valori di rugosità, i parametri di zona e perfino i volumi del campione dalle
immagini del SEM.
111
Metodologie sperimentali
Una volta ricostruita l’immagine tridimensionale è possibile farla ruotare per ottenere
un’immagine migliore circa la geometria 3D. E’ importante che le immagini SEM che
vengono catturate siano nitide. Immagini confuse non porteranno, come risultato, ad una
buona ricostruzione superficiale. Inoltre, se nelle immagini esistono aree molto luminose,
cioè aree in cui sulle immagini risulta un livello di grigio pari a 255 (ciò vuol dire che le
immagini sono sature), è necessario ridurre la lucentezza, eliminando la saturazione. Di
seguito si riportano i punti fondamentali per ottenere una immagine tridimensionale.
Figura 75: corretta illuminazione
•
Determinazione del piano di massa: posizionare il provino analizzato in modo
che questo sia approssimativamente nella posizione che noi vogliamo fargli
avere nel DEM finale. Questa sarà la posizione di riferimento per il processo di
creazione DEM e le seguenti procedure di analisi. Così in un campione che ha,
per esempio, diversi tipi di riscontri sul piano naturale, si cercherà di osservare
perpendicolarmente tale piano, senza però utilizzare quantitativamente
l’immagine su tale piano.
•
Rotazione eucentrica verso destra e verso il basso: inclinare eucentricamente il
campione verso destra intorno all’asse verticale; se il microscopio non
consente di fare un’inclinazione lungo l’asse verticale, ma verso l’asse
orizzontale, avremo un’inclinazione verso il basso. E’ molto importante che
l’inclinazione segua una procedura eucentrica ( figura 76a) e 76b)).
Nel caso ideale, l’asse principale e l’asse di inclinazione si intersecano in un punto
K(ez) nella parte più alta della superficie. In questo modo l’inclinazione è effettuata in
un punto centrale fisso dell’immagine.
112
Metodologie sperimentali
Figura
76a):
Inclinazione
eucentrica Figura 76b): Inclinazione errata con l’asse
corretta in cui l’asse principale e l’asse di di inclinazione al di sotto della superficie del
inclinazione si intersecano, nella parte campione
superiore dell’immagine, in un punto K(ez)
centrale.
Nel caso non ideale, l’asse principale e l’asse di inclinazione non si intersecano sulla
sommità della superficie, ma sotto o sopra in un punto indicato con K(ne). In un caso non
ideale si avrà quindi uno spostamento del punto centrale dell’immagine, di lato nel caso di
inclinazione verticale e verso l’alto nel caso di inclinazione orizzontale. Così è possibile
convertire un caso reale in uno ideale seguendo le seguenti procedure di inclinazione:
a) Prima di inclinare, usando una penna, segnare sullo schermo il punto centrale
dell’immagine (che potrebbe essere la nostra struttura significativa);
b) Inclinare fino a quando la struttura significativa è quasi scomparsa dal bordo
dell’immagine;
c) Sistemare la posizione del campione fino a che la struttura significativa si trovi
un’altra volta nel punto centrale dell’immagine;
d) Se le distanze di lavoro cambiano, allora bisogna ripetere i passi precedenti fino a
quando si trova l’angolo di inclinazione cercato.
L’angolo di inclinazione idoneo (detto α) tra la posizione determinata dal piano e la
posizione di inclinazione a destra dipende dalla relativa altezza e dall’ingrandimento.
I valori tipici di range vanno da 1° grado (per alti ingrandimenti e grandi variazioni di
altezza) a 7° (per bassi ingrandimenti e piccole variazioni di altezza).
•
Inclinazione eucentrica a sinistra o in alto: si inclina il campione a sinistra (nel caso
di un’asse di inclinazione verticale) o verso l’alto (nel caso di asse di inclinazione
113
Metodologie sperimentali
orizzontale). L’angolo di inclinazione dovrebbe essere approssimativamente 2α ; in
questo modo si catturano due immagini che sono simmetriche al piano di massa.
Non è importante che l’inclinazione sia esattamente 2α , ma l’importante è che la
misura del relativo angolo di inclinazione tra l’immagine destra e l’immagine
sinistra sia il più esatto possibile. Un errore nell’angolo di inclinazione è la più
grave causa di inesattezza nel risultato finale del DEM. Se l’asse di inclinazione
non è in posizione eucentrica, bisogna ripetere la procedura descritta prima.
Figura 77:
Micrografia
effettuata
al
SEM
di
una
ghisa
ferritica
Immagine di sinistra e di destra
•
Salvare l’immagine sinistra (verso il basso): si cattura l’immagine salvandola in un
comune formato file; questa sarà l’immagine di sinistra (LEFT) nel programma
Mex.
•
Spostare le immagini in Alicona Mex: si trasferiscono le immagini nel Mex. E’
molto importante che, nel caso di un’asse di inclinazione orizzontale, le immagini
siano ruotate di 90° gradi in senso antiorario prima di cominciare a trasferirle nel
Alicona Mex. L’immagine in basso diventa l’immagine di sinistra e l’immagine in
alto diventa l’immagine di destra. Gli angoli di inclinazione che noi specifichiamo
nel Mex per le immagini sono di 0° gradi per quella di sinistra e il relativo angolo
di inclinazione per quella di destra.
114
Metodologie sperimentali
Figura 78: Micrografia effettuata al SEM di una ghisa sferoidale perlitica. Immagine di
sinistra e di destra.
Figura 79: Micrografia effettuata al SEM di una ghisa ferritico-perlitica. Immagine di
sinistra e di destra
115
Metodologie sperimentali
Figura 80: Ricostruzione 3D di una ghisa sferoidale ferritica
Figura 81: Ricostruzione di una immagine tridimensionale di ghisa a matrice perlitica.
116
Metodologie sperimentali
Figura 82: Ricostruzione di una immagine tridimensionale di una ghisa sferoidale a
matrice ferritico-perlitica
6.4 PROCEDURA DI OSSERVAZIONE AL SEM DI PROVE DI TRAZIONE
In questo lavoro di tesi è stato proposto un metodo di analisi di meccanismi di
danneggiamento attraverso prove di trazione con microprovette (Figura 83) in ghisa
ferritica, perlitica e ferrito-perlitica (50% ferrite e 50% perlite, 70% ferrite e 30% perlite)
eseguite su micromacchina di trazione (Figura 84) disposta direttamente nel SEM [46]. La
forza di trazione applicata al microprovino viene direttamente trasmessa dalla rotazione di
una vite a brucola (come mostrato in figura 84). Il legame esistente tra il numero di giri da
compiere e la sollecitazione da applicare alla microprovetta è stabilito dal nomogramma
determinato a partire dal diagramma
σ ing − ε ing
(figura 85) ed è funzione della
deformazione come indicato nella relazione (60).
L
n = 0 ⋅ ε ing
p
(60)
essendo noti Lo= 14 mm (tratto utile)
p= 0,8
(passo vite a brucola)
117
Metodologie sperimentali
Figura 83: Microprovetta di trazione
Figura 84: Micromacchina di trazione (progettazione La.M.E.I - Ing. Piacente)
In tal modo è possibile osservare al SEM il reale comportamento nel tratto elastico e
plastico del diagramma
σ ing − ε ing delle ghise sferoidali ferritiche, ferrito-perlitiche e
perlitiche, ma soprattutto seguire per step successivi i meccanismi di innesco di cricche
secondarie in corrispondenza di elementi di grafite degenerati che propagano nella matrice
118
Metodologie sperimentali
metallica e la reale influenza degli sferoidi di grafite nei modelli di distacco (debonding)
duttile e fragile per diverse microstrutture delle ghise sferoidali.
900
4.50
EN GJS 350-22
EN GJS 400-15
EN GJS 700-2
EN GJS 500-7
Giri
800
700
Stress [MPa]
600
4.00
3.50
3.00
500
2.50
400
2.00
300
1.50
200
1.00
100
0.50
0
0.00
0.10
0.20
0.30
0.40
0.00
0.50
Strain
Figura 85: Nonogramma complessivo relativo ai diversi tipi di ghise sferoidali.
119
Metodologie sperimentali
6.5 APPENDICE
Viene presentata una procedura di segmentazione innovativa in quanto è formulata
direttamente nel dominio discreto dei dati. Un’immagine I è definita come una matrice di
numeri interi
{I }
i, j
su una griglia di punti D = {( i, j ) , i = 1,K, N ; j = 1,K, M } . Senza
perdita di generalità si può assumere I : D → [ 0 255] .
segmentazione
di
{Dk } , k = 1, 2,K, K
I
si
consideri
la
rappresentazione
Come caso particolare di
costante
a
tratti:
sia
una partizione finita del dominio D con frontiera ∂D ; una
segmentazione costante a tratti è definita come segue
⎧1
⎩0
K
I s = ∑ ck χ Dk ,
χ Dk (i, j ) = ⎨
k =1
⎛ K
⎞
dove B = ⎜ U ∂Dk ⎟
⎝ k =1
⎠
for (i, j ) ∈ Dk
altrimenti
(1)
è la frontiera della segmentazione (si noti che per definizione
∂D ⊂ B ), i ck sono i valori costanti assegnati ad ogni sottoregione Dk scelti in un insieme
di nC ≤ K valori. Una semplice formulazione del problema di segmentazione è la
seguente: data un’immagine I : D → [ 0 255] , si scelga un intero nC ≥ 2 e si trovino una
partizione { Dk } , k = 1, 2,K, K di D e delle costanti c1 ,K, cK tali che I s data dalla (1) sia
una buona rappresentazione di I secondo un opportuno criterio di ottimo.
Un criterio ragionevole consiste nell’ottimizzare l’errore di approssimazione ed una misura
dell’efficienza della segmentazione: una buona segmentazione è costituita dal minimo
numero di sottoregioni disgiunte con area minima e frontiera regolare. Ogni sottoregione
può essere definita per mezzo delle funzioni di livello. Consideriamo per semplicità
un’immagine con un solo oggetto differente dallo sfondo, per cui si avranno due
sottoregioni D1 , che corrisponde all’oggetto, e D2 = D \ D1 , che corrisponde allo sfondo.
Sia φ = {φ i , j }: D → ℜ una funzione continua; D1 e D2 possono essere definite nel modo
seguente
D1 =
{( i, j ) :φi, j ≥ 0} ,
D2 =
{( i, j ) :φi, j < 0}
(2)
La frontiera della segmentazione è nota una volta che siano individuati i punti di frontiera
di D1 e D2 . Questi non sono semplicemente l’insieme di livello zero di φ , come nella
formulazione nel continuo, ma devono essere definiti in base al numero di cambi di segno
di φ in un opportuno intorno del pixel esaminato. In [42] è stata definita una funzione
120
Metodologie sperimentali
γ (φi , j ) che vale 1 se il pixel ( i, j ) è di frontiera e 0 nel caso contrario. A questo punto può
essere definito il seguente funzionale di costo
( )( Ii, j − c1 )
E ( c1 , c2 ;φ ) = λ ∑ H φi , j
i, j
( )
2
(
( )) ( Ii, j − c2 )
+ λ ∑ 1 − H φi , j
i, j
2
+
α
2
∑ φi2, j
i, j
( )
(3)
+ μ ∑ H φi , j + ν ∑ γ φi , j
i, j
i, j
dove H ( ⋅) è la funzione di Heaviside e λ , α , μ , ν
sono parametri da fissare
opportunamente in modo da pesare diversamente l’influenza dei vari termini dell’indice di
costo. In [42] sono state trovate condizioni necessarie e sufficienti di minimo globale per la
funzione (3)
c1 =
∑ H (φi, j ) Ii, j
i, j
∑ H (φi, j )
c2 =
,
i, j
∑ (1 − H (φi, j )) Ii, j
i, j
(4)
∑ (1 − H (φi, j ))
i, j
⎞
1⎛
φi , j = − ⎜ λ pi , j + μ + ν ∑ ⎡ H (φi + l, j ) − H (φi , j ) − H (φi , j + l ) − H (φi , j ) ⎤ qi. j ⎟ δ (φi , j )
⎣
⎦
α⎝
l =−1
⎠
1
(
) (
)
(5)
dove pi , j e qi , j sono funzioni ausiliarie opportunamente definite. Mentre le (4) forniscono
in forma chiusa i valori ottimi di c1 , c2 , la (5) può essere risolta mediante uno schema
ricorsivo [42, 43].
121
Risultati ed analisi
CAPITOLO VII
RISULTATI ED ANALISI
7.1
IMPIEGO
MEDIANTE
DELLE
RETI
CONTORNI
NEURALI
ATTIVI
E
DELLA
SEGMENTAZIONE
NELL’IDENTIFICAZIONE
DEGLI
ELEMENTI METALLOGRAFICI E MORFOLOGICI DI INTERESSE NELLE
GHISE SFEROIDALI.
Il primo obiettivo di questo lavoro di tesi è la caratterizzazione morfologica degli sferoidi
di grafite e quindi l’individuazione di parametri che possano quantitativamente definire il
grado di degenerazione degli stessi. Nelle figure 73 ed 74 sono mostrate due situazioni
molto differenti: nella figura 73 è evidenziato uno sferoide di forma piuttosto circolare con
profilo regolare mentre nella figura 74, la particella di grafite è caratterizzata da un profilo
molto frastagliato con una forma abbastanza lontana dalla sfera ideale. Queste
caratteristiche vengono normalmente valutate qualitativamente per ispezione visiva da un
esperto che raffronta il provino in esame con alcuni campioni di riferimento. Tale
comparazione è tuttavia suscettibile di una definizione quantitativa una volta che gli
sferoidi sono separati dallo sfondo e possono essere caratterizzati singolarmente.
L’impiego della rete neurale permette di segmentare le immagini precedenti ottenendo gli
sferoidi come regioni di colore nero separati dallo sfondo di colore bianco. La struttura
delle rete neurale utilizzata si compone di un unico strato con 30 neuroni; come funzione
di trasferimento si è scelta la logsig (figura 75) ed infine come training si è adottato un
tipico algoritmo di backpropagation basato sul gradiente, con un numero di epoche pari a
6 ×104 . Nelle figure 76 e 77 sono rappresentate le uscite ottenute dalla rete.
122
Risultati ed analisi
Figura 73: Sferoide di grafite
Figura 74: Sferoide degenerato (o “grafite
esplosa”)
Figura 75: Funzione di trasferimento logsin
Figura 76: Uscita della rete (a partire dalla figura
73).
Area: 203190
Centroid: [414.3902 270.3934]
BoundingBox: [135.5000 22.5000 551 503]
MajorAxisLength: 528.4243
MinorAxisLength: 494.1898
Eccentricity: 0.3541
Orientation: 0.5322
ConvexHull: [46x2 double]
ConvexImage: [503x551 logical]
ConvexArea: 213406
Image: [503x551 logical]
FilledImage: [503x551 logical]
FilledArea: 204011
EulerNumber: -7
Extrema: [8x2 double]
EquivDiameter: 508.6350
Solidity: 0.9521
Extent: 0.7331
PixelList: [203190x2 double]
123
Risultati ed analisi
Figura 77: Uscita della rete (a partire dalla
figura 74).
] Area: 106718
Centroid: [358.4913 368.6075]
BoundingBox: [84.5000 193.5000 521 349]
MajorAxisLength: 519.3000
MinorAxisLength: 314.1605
Eccentricity: 0.7962
Orientation: -13.5768
ConvexHull: [41x2 double]
ConvexImage: [349x521 logical]
ConvexArea: 142508
Image: [349x521 logical]
FilledImage: [349x521 logical]
FilledArea: 114637
EulerNumber: -60
Extrema: [8x2 double]
EquivDiameter: 368.6158
Solidity: 0.7489
Extent: 0.5869
PixelList: [106718x2 double
Le figure 76 e 77 così ottenute sono accompagnate da una lista di proprietà morfologiche
delle particelle di dimensioni maggiori presenti. Di particolare interesse per la
caratterizzazione delle ghise sferoidali risultano l’eccentricità e la solidità. L’eccentricità è
definita in base all’ellissoide che in cui è inscritto lo sferoide, ed è data dal rapporto tra la
distanza dei fuochi e la lunghezza dell’asse maggiore. Essa permette di valutare quanto la
forma dello sferoide si discosti dal cerchio, che ha eccentricità pari a zero; nel caso dello
sferoide riportato nella figura 76, che, se valutato qualitativamente, può essere considerato
di buona qualità, ha eccentricità pari a 0.3541, mentre la particella più grande riportata
nella figura 77, ha eccentricità pari a 0.7962. La solidità è definita come il rapporto tra
l’area dello sferoide e l’area del poligono convesso in cui esso risulta essere inscritto; essa
valuta quanto il profilo dello sferoide sia frastagliato: una solidità pari a 1 denota un profilo
regolare senza insenature. Infatti lo sferoide presente nella figura 76 ha solidità pari a
0.9521, mentre la particella più grande presente nella figura ha solidità pari a 0.7489.
Tali parametri possono costituire una base oggettiva per la valutazione quantitativa della
qualità dei campioni esaminati. Ad esempio, la figura 78 riporta l’immagine ottenuta al
microscopio ottico (ad un ingrandimento inferiore rispetto alle figure 73 ed 74) in cui sono
presenti contemporaneamente particelle con caratteristiche differenti; la valutazione
complessiva della qualità della grafite può essere effettuata mediante una analisi statistica
della distribuzione dei valori dei parametri morfologici di interesse sull’insieme delle
particelle presenti nella figura 79, individuati dalla rete neurale.
124
Risultati ed analisi
Figura 78: Immagine di partenza.
Figura 79: Immagine elaborata mediante
RNA.
Considerando i risultati ottenuti dalla elaborazione dei due casi riportati nelle figure 76 e
77, si è scelto come valore di soglia per l’eccentricità 0.4 e per la solidità 0.8. Il risultato
ottenuto per l’esempio nella figura 79 è quello di una percentuale del 7% di particelle con
eccentricità inferiore al valore di soglia (ovvero particelle la cui sezione è da considerarsi
circolari), e una percentuale dell’82% di particelle con una solidità superiore al valore di
soglia (ovvero particelle da considerarsi non frastagliate).
Il problema della determinazione quantitativa dello stato di nodulizzazione degli elementi
di grafite nelle ghise sferoidali è particolarmente sentito, vista l’influenza che la forma
delle particelle ha sulle proprietà meccaniche delle ghise sferoidali.
Tuttavia per poter analizzare immagini ricavate dal microscopio ottico più “complesse”,
sulle quali cioè, dopo aver effettuato attacco chimico, sia possibile osservare anche la
microstruttura, è stata utilizzata in questo lavoro di tesi una più sofisticata tecnica di
segmentazione nota con il nome di segmentazione mediante contorni attivi, come in VI.
7.1.1 Applicazione della procedura di segmentazione mediante contorni attivi:
risultati
Utilizzando la procedura di segmentazione descritta in [42], per ogni provino sono state
ottenute le segmentazioni a 2 e a 4 livelli. Tali segmentazioni sono il risultato di una
procedura di ottimizzazione globale che approssima l’immagine originale con una sua
versione costante a tratti: questa è ottenuta minimizzando un funzionale di costo (formula
125
Risultati ed analisi
(3) in Appendice) che pesa opportunamente l’errore globale di approssimazione, l’area
delle regioni della segmentazione e la lunghezza delle loro frontiere [42].
a)
b)
c)
Figura 80 a) immagine originale con 70% di ferrite (valutazione soggettiva fatta da un
esperto (EN GJS 450-10)); b) segmentazione a 2 livelli; c) segmentazione a 4 livelli.
Per l’immagine riportata nella figura 80, relativa alla ghisa EN GJS450-10, è possibile
stabilire la percentuale di ferrite misurando il rapporto tra l’area della parte più chiara (che
corrisponde alla ferrite) e l’area totale della matrice metallica (area totale del provino
diminuita dell’area dei noduli); questo può essere ottenuto dall’immagine segmentata a 2
livelli (bianco e nero) di figura 80b): in questa infatti è possibile valutare l’area della zona
che corrisponde alla ferrite contando i pixel della zona bianca, ottenendo in tal modo un
rapporto percentuale di 75%. Bisogna sottolineare la precisione con cui la segmentazione
permette di separare la zona chiara dalle altre; la qualità del risultato dipende
essenzialmente dal carattere globale della procedura, per cui ciò che avviene in un generico
pixel influenza il risultato in tutti gli altri pixel. Una operazione di soglia, che è una
semplice operazione locale in cui il valore assegnato in un pixel dipende solo dal valore in
pochi pixel adiacenti, commetterebbe invariabilmente molti errori nel tentativo di separare
i noduli dallo sfondo, dato il tipo di segnale della figura 80 a) con un elevato numero di
livelli di grigio. Inoltre la procedura di segmentazione proposta consente di accedere ad
ogni singolo elemento grafico dell’immagine e di poterlo analizzare indipendentemente
dagli altri oggetti presenti. Per tale motivo queste procedure globali vengono dette region-
based. Al contrario le procedure locali, per via degli errori di detezione, determinano
contorni spessi e frammentati degli oggetti per cui non sono in grado di definire alcuna
relazione fra i pixel di uno stesso oggetto; queste procedure sono tipicamente dette pixel-
oriented. Per l’immagine riportata nella figura 81, relativa alla ghisa EN GJS350-22, è
stata applicata la medesima procedura, ottenendo una percentuale di ferrite pari a 96%.
126
Risultati ed analisi
a)
b)
c)
Figura 81 a) immagine originale con 100% di ferrite (valutazione soggettiva fatta da un
esperto(EN GJS 350-22)); b)segmentazione a 2 livelli; c) segmentazione a 4 livelli.
Nel caso delle ghise sferoidali l’influenza della matrice sulla propagazione della cricca di
fatica risulta piuttosto modesta nel caso di bassi valori del DK applicato e/o del rapporto di
carico R , mentre risulta piuttosto evidente nel caso di valori di R elevati, nella zona II e
nella zona III di avanzamento della cricca di fatica [8]. Ruolo essenziale viene quindi
anche svolto dalla morfologia degli elementi di grafite. La medesima procedura è stata
applicata agli elementi di grafite nelle due ghise sferoidali austemperate ADIA ed ADIB
(rispettivamente figura 82 e figura 83). Per la caratterizzazione degli elementi di grafite
sono stati utilizzati i parametri Eccentricità e Solidità, già utilizzate nel paragrafo 7.1. Le
due ghise austemperate investigate sono state analizzate considerando 20 immagini per
ognuna, ottenendo i valori medi riportati nelle tabelle 6 e 7.
Figura 82 a): Elementi di grafite nella
Figura 82 b): Microstruttura ghisa
ghisa austemperata ADIA.
austemperata ADIA. (Nital 5%)
127
Risultati ed analisi
Figura 83a): Elementi di grafite nella ghisa
Figura 83b): Microstruttura ghisa
austemperata ADIB (Nital 5%)
austemperata ADIB (Nital 5%)
Tabella 6: quadro riassuntivo relativo agli elementi di grafite (ghisa ADIA)
25<Area<250 250<Area<750 Area>750
(pixel)
(pixel)
(pixel)
Numero noduli per classi di area
71
6
7
⎧valor medio
Solidità ⎨
⎩deviazione s tan dard
0.8779
0.7478
0.6401
0.0625
0.0909
0.1427
⎧valor medio
Eccentricità ⎨
⎩deviazione s tan dard
0.6845
0.7940
0.6680
0.1974
0.1394
0.2201
L’analisi effettuata evidenzia e quantifica la degenerazione degli elementi di grafite. La
ghisa designata come ADIA è caratterizzata da una minore solidità, specialmente per
quanto riguarda gli elementi di grafite di dimensioni maggiori, e da una eccentricità
decisamente più elevata per tutte e tre le classi dimensionali considerate.
128
Risultati ed analisi
Tabella 7: quadro riassuntivo relativo agli elementi di grafite (ghisa ADIB)
25<Area<250 250<Area<750 Area>750
(pixel)
(pixel)
(pixel)
Numero noduli per classi di area
40
12
6
⎧valor medio
Solidità ⎨
⎩deviazione s tan dard
0.9039
0.9250
0.9391
0.0374
0.0228
0.0359
⎧valor medio
Eccentricità ⎨
⎩deviazione s tan dard
0.6416
0.5644
0.5797
0.1460
0.1431
0.1279
7.2 RISULTATI DI FATICA OTTENUTI PER UNA GHISA SFEROIDALE
FERRITICA
I risultati da/dN-ΔK relativi alle prove di fatica effettuate in aria sui provini CT realizzati
in ghisa sferoidale a matrice ferritica (100% ferrite), la cui composizione chimica ed il cui
trattamento sono riportati in V, sono stati riportati nel grafico di figura 84. Si può notare
come il rapporto di carico influenzi il comportamento a fatica di questo tipo di ghisa sia sui
valori di soglia sia sullo stadio II in cui è valida la legge di Paris. Infatti al crescere del
rapporto di carico, per uno stesso valore di ΔK applicato si ottengono valori crescenti della
velocità di avanzamento della cricca di fatica. Inoltre sempre al crescere di R si ha una
diminuzione del valore di ΔKth e di ΔKmax (=(1-R) KIC).
Le analisi frattografiche al SEM effettuate sui provini sottoposti a fatica al variare dei
rapporti di carico sono riportate nelle figure 85-86-87.
129
Risultati ed analisi
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
R = 0.1
R = 0.5
R = 0.75
-9
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 84: Curve di propagazione della cricca di fatica da/dN-ΔK per la ghisa ferritica
GSA e per tutti e tre i rapporti di carico esaminati R=0,1, 0,5, 0,75.
a)
b)
Figura 85: Analisi al SEM della superficie di frattura di un provino in ghisa sferoidale a
matrice ferritica sottoposto a fatica con rapporto di carico R=0,1 a ΔK=15 MPa m1/2: a)
zone di microduttilità; b) rotture per clivaggio.
In figura 85 a) e b) si può notare che per rapporti di carico R=0,1 e ΔK=15 MPa m1/2 si
hanno nella matrice completamente ferritica zone di microduttilità con formazione di
“dimples” e presenza di rotture per clivaggio che non necessariamente hanno origine in
corrispondenza delle interfacce sferoide-matrice . In alcuni casi (figure 86 e 87) al variare
di R e ΔK è piuttosto evidente una microplasticità che si riflette nella formazione di cricche
secondarie all'interfaccia sferoidi-matrice ed un costante distacco degli sferoidi dalla
matrice metallica.
130
Risultati ed analisi
a)
b)
Figura 86: Analisi al SEM della superficie di frattura di un provino di ghisa sferoidale a
matrice ferritica sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10 MPa m1/2: a)
cricche secondarie all’interfaccia sferoide matrice; b) la cricca avanza verso destra.
a)
b)
Figura 87: Analisi al SEM della superficie di frattura di un provino di ghisa sferoidale a
matrice ferritica sottoposto a fatica con rapporto di carico R=0,75 a ΔK=8 MPa m1/2: a)
zone di microplasticità ; b) evidente distacco degli sferoidi dalla matrice ferritica.
Questi meccanismi di rottura sono confermati dall’analisi dei profili di frattura riportati in
figura 88.
131
Risultati ed analisi
Figura 88: Analisi al LOM del profilo di frattura di un provino di ghisa sferoidale a
matrice ferritica sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10 MPa m1/2.
7.3 RISULTATI DI FATICA OTTENUTI PER UNA GHISA SFEROIDALE
PERLITICA.
I risultati da/dN-ΔK relativi alle prove di fatica effettuate in aria sui provini CT realizzati
in ghisa sferoidale a matrice perlitica, la cui composizione ed il cui trattamento sono
riportati al V, sono stati riportati nel grafico di figura 89.
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
-9
R = 0,1
R = 0,5
R = 0,75
10
-10
10
3
10
50
1/2
ΔK [MPa m ]
Figura 89: Curve di propagazione della cricca di fatica da/dN-ΔK per la ghisa perlitica
GSB e per tutti e tre i rapporti di carico esaminati R=0.1, 0.5, 0.75.
132
Risultati ed analisi
Anche per una ghisa sferoidale a matrice perlitica al crescere del rapporto di carico R, si
hanno, per un dato ΔK applicato, valori crescenti della velocità di avanzamento della cricca
di fatica.
a)
b)
Figura 90: Analisi al SEM della superficie di frattura di un provino di ghisa sferoidale a
matrice perlitica sottoposto a fatica: a) rapporto di carico R=0,1 a ΔK=15 MPa m1/2:
clivaggio e striature; b) rapporto di carico R=0,5 a ΔK=10 MPa m1/2: evidente distacco
degli sferoidi dalla matrice ferritica.
a)
b)
Figura 91: Analisi al SEM della superficie di frattura di un provino ghisa sferoidale a
matrice perlitica sottoposto a fatica con rapporto di carico R=0,75 a ΔK=10 MPa m1/2: a)
morfologia di frattura a delta di fiume ; b) evidente distacco degli sferoidi dalla matrice
perlitica.
Le figure 90-91 mostrano la morfologia di frattura di una ghisa sferoidale perlitica e, come
sia evidente, indipendentemente dal rapporto di carico R, la presenza di clivaggio e
133
Risultati ed analisi
striature nella matrice perlitica sino alla formazione di striature fragili, e alla formazione
della morfologia di frattura detta a “delta di fiume”. Risulta inoltre evidente il distacco
delle particelle di grafite. Inoltre il “debonding” fragile degli sferoidi di grafite è possibile
osservare che le superfici interne lasciate libere dagli elementi di grafite presentano
evidenti zone di microduttilità ( generazione di “microdimples” [44]).
Questi meccanismi di rottura sono confermati dall’analisi dei profili di frattura riportati in
figura 92.
Figura 92: Analisi al LOM del profilo di frattura di un provino di ghisa sferoidale a
matrice perlitica sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10 MPa m1/2.
7.4 RISULTATI DI FATICA OTTENUTI PER UNA GHISA SFEROIDALE
FERRITO-PERLITICA.
I risultati da/dN-ΔK relativi alle prove di fatica effettuate in aria sui provini CT realizzati
in ghisa sferoidale a matrice ferrito-perlitica, la cui composizione chimica è riportata al V,
sono stati riportati nel grafico di figura 93. La figura mostra una evidente influenza
dell’effetto di chiusura sulla propagazione delle cricche di fatica nella ghisa a matrice
ferrito-perlitica. Si può infatti, come per le precedenti ghise analizzate , ottenere la
medesima velocità di avanzamento della cricca di fatica per valori sempre più bassi della
ampiezza del fattore di intensificazione degli sforzi applicato (ΔK) all’aumentare di R.
Dall’osservazione della morfologia della superficie di frattura al SEM una ghisa sferoidale
ferrito-perlitica risente in modo evidente della distribuzione delle differenti fasi all’interno
della matrice metallica (da figura 94 a figura 96).
134
Risultati ed analisi
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
R = 0,1
R = 0,5
R = 0,75
-9
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 93: Curve di propagazione della cricca di fatica da/dN-ΔK per la ghisa ferrito-
perlitica GSC e per tutti e tre i rapporti di carico esaminati R=0,1, 0,5, 0.75.
a)
b)
Figura 94: Analisi al SEM della superficie di frattura di un provino di ghisa sferoidale a
matrice ferrito-perlitica sottoposto a fatica rapporto di carico R=0,1 a ΔK=15 MPa m1/2: a)
la ferrite è disposta a guscio; b) distacco degli sferoidi dalla matrice.
Infatti in queste ghise la ferrite si dispone prevalentemente in modo da formare un guscio
intorno agli sferoidi di grafite, mentre la perlite costituisce la matrice vera e propria.
La superficie di frattura mostra una prevalente rottura per clivaggio dei gusci ferritici, con
un certo distacco dello sferoide dalla matrice metallica (figure 94-95), con una rottura
della matrice perlitica.
135
Risultati ed analisi
a)
b)
Figura 95: Analisi al SEM della superficie di frattura di un provino in ghisa sferoidale
ferrito-perlitica sottoposto a fatica: a) rapporto di carico R=0,5 a ΔK=15 MPa m1/2:
debonding; b) rapporto di carico R=0,75 a ΔK=10 MPa m1/2: evidente evidente debonding
L’analisi delle sezioni trasversali al microscopio ottico evidenzia la presenza del
debonding degli elementi di grafite che, talvolta, comporta la disgregazione dell’elemento
di grafite (figura 96).
Figura 96: Analisi al LOM del profilo di frattura di un provino di ghisa sferoidale a
matrice ferrito-perlitica sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10 MPa
m1/2.
136
Risultati ed analisi
7.5 RISULTATI DI FATICA OTTENUTI PER UNA GHISA SFEROIDALE A
MATRICE PREVALENTEMENTE FERRITICA (70% FERRITE, 30% PERLITE).
I risultati da/dN-ΔK relativi alle prove di fatica effettuate in aria sui provini CT realizzati
in ghisa sferoidale a matrice prevalentemente ferritica (70% ferrite, 30% ferrite), la cui
composizione chimica è riportata alla TabV, 4 sono rappresentati sul grafico di figura 97.
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
-9
R = 0,1
R = 0,5
R = 0,75
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 97: Curve di propagazione della cricca di fatica da/dN-ΔK per la ghisa ferrite 70%
e 30% perlite (GSD) e per tutti e tre i rapporti di carico esaminati R=0,1, 0.5, 0,75.
La figura mostra che l’andamento delle curve di propagazione delle cricche di fatica per
tale ghisa risultano simili a quelle di una ghisa a matrice completamente ferritica (100%
ferrite).
Tuttavia dall’analisi della morfologia della frattura al SEM per i diversi rapporti di carico,
si osserva come per le ghise completamente ferritiche zone di microduttilità e dimples, ma
anche una certa frazione di clivaggio dovuta alla presenza di una piccola frazione
volumetrica di perlite (20-30%) (figura 98).
Questi meccanismi di rottura sono confermati dall’analisi dei profili di frattura al LOM
riportati in figura 99.
137
Risultati ed analisi
a)
b)
Figura 98: Analisi al SEM della superficie di frattura di un provino in ghisa sferoidale a
matrice prevalentemente ferritica sottoposto a fatica: a) rapporto di carico R=0,1 a ΔK=15
MPa m1/2: zone di microduttilità; b) rapporto di carico R=0,5 a ΔK=10 MPa
m1/2:debonding;
c)
d)
Figura 98: Analisi al SEM della superficie di frattura di un provino in ghisa sferoidale a
matrice prevalentemente ferritica sottoposto a fatica: c), d) rapporto di carico R=0,75 a
ΔK=15 MPa m1/2: clivaggio.
138
Risultati ed analisi
Figura 99: Analisi al LOM del profilo di frattura di un provino di ghisa sferoidale a
matrice prevalentemente ferritica sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10
MPa m1/2.
7.6 RISULTATI DI FATICA OTTENUTI PER UNA GHISA SFEROIDALE
AUSTEMPERATA.
I risultati da/dN-ΔK relativi alle prove di fatica effettuate in aria sui provini CT realizzati
in ghisa austemperata rispettivamente già denominate ADIA ed ADIB (figura 82c) e
figura 83c)), la cui composizione chimica e cui trattamenti termici sono riportati alla Tab
V-5 sono rappresentati sui grafici delle figure 100-101-102.
Si ricorda che la ghisa austemperata ADIA presenta dall’analisi al LOM una maggiore
degenerazione degli sferoidi di grafite (figura 82c) e figura 83 c)). Si può osservare che
per tutti i valori di R considerati, le due ghise hanno un comportamento praticamente
identico negli stadi II e III della propagazione della cricca di fatica (rispettivamente
propagazione lineare, ove è valida la relazione di Paris, e la rottura di schianto), mentre vi
sono delle differenze nello stadio I (soglia, ΔK th).
La ghisa ADIA, ovvero quella caratterizzata da una minore solidità e da una maggiore
eccentricità (paragrafo 7.1.2) degli elementi di grafite, è caratterizzata da valori inferiori
del ΔK th rispetto alla ghisa ADIB, per tutti e tre i rapporti di carico investigati.
I valori più bassi del ΔK applicato implicano valori del raggio di plasticizzazione ciclica
(rrpz = (ΔK/σy)2/12π) comparabili con le dimensioni degli elementi di grafite. La loro
eventuale degenerazione implica quindi un peggioramento della resistenza alla
propagazione della cricca di fatica.
139
Risultati ed analisi
All’aumentare del ΔK applicato diminuisce l’importanza degli elementi di grafite, mentre
aumenta l’importanza delle caratteristiche della matrice metallica: le due ghise
austemperate, distinte esclusivamente dal grado di degenerazione degli sferoidi, mostrano
da/dN
[m/ciclo]
una resistenza praticamente identica.
10
-6
10
-7
10
-8
10
-9
10
R = 0.1
ADIA
ADIB
-10
3
10
ΔK [MPa m1/2]
50
Figura 100: Resistenza alla propagazione della cricca di fatica per le due ghise ADIA ed
da/dN
[m/ciclo]
ADIB (R = 0,1)
10
-6
10
-7
10
-8
10
-9
R = 0.5
ADIA
ADIB
-10
10 3
10
ΔK [MPa m1/2]
50
Figura 101: Resistenza alla propagazione della cricca di fatica per le due ghise ADIA ed
ADIB (R = 0,5).
140
Risultati ed analisi
-6
10
-7
da/dN
[m/ciclo]
10
-8
10
R = 0,75
ADIA
ADIB
-9
10
-10
10 3
10
ΔK [MPa m1/2]
50
Figura 102: Resistenza alla propagazione della cricca di fatica per le due ghise ADIA ed
ADIB (R = 0,75).
a)
b)
Figura 103: Analisi al SEM della superficie di frattura di provini in ghisa austemperata
sottoposti a fatica: a) ADIA rapporto di carico R=0,5 a ΔK=6 MPa m1/2: cricca secondaria;
b) ADIB rapporto di carico R=0,5 a ΔK=10 MPa m1/2: evidente debondin
L’analisi al SEM delle superfici di frattura consente lo studio dell’influenza della
degenerazione degli elementi grafite sui micromeccanismi di avanzamento. Nel caso della
ghisa austemperata caratterizzata da una maggiore degenerazione degli elementi di grafite
(ADIA, figura 103 a)), si può osservare per bassi valori del ΔK applicato la presenza di
cricche secondarie che si innescano in corrispondenza degli elementi di grafite. Nel caso
della ghisa ADIB, tale meccanismo non viene mai rilevato: la cricca propaga nella matrice
141
Risultati ed analisi
ed in corrispondenza degli elementi di grafite si verifica un distacco con deformazione
plastica (figura 103 b) e figura 104).
Figura 104: Analisi al LOM del profilo di frattura di un provino di ghisa sferoidale
austemperata (ADIB) sottoposto a fatica con rapporto di carico R=0,5 a ΔK=10 MPa m1/2.
7.7 INFLUENZA DEL RAPPORTO DI CARICO SULLA PROPAGAZIONE
DELLA CRICCA DI FATICA IN UNA GHISA SFEROIDALE FERRITOPERLITICA
MEDIANTE
SPERIMENTAZIONE
E
RETI
NEURALI
ARTIFICIALI.
L’approccio fenomenologico alla propagazione della cricca di fatica mediante modelli del
tipo “Paris” non consente di considerare l’influenza di tutte le variabili. Fra queste
sicuramente il rapporto di carico R è una di quelle più considerate, e, nonostante negli
ultimi decenni si sia cercato di identificare i principali meccanismi che dipendono da R (ad
esempio l’effetto chiusura), tale parametro ancora è considerato come una variabile in
molte applicazioni. Un metodo alternativo per considerare l’influenza di tutti i parametri è
basato sull’utilizzazione di una rete neurale artificiale (RNA), ed in questo lavoro è stata
investigata l’influenza del rapporto di carico sulla resistenza alla propagazione della cricca
di fatica in una ghisa sferoidale ferrito-perlitica. Sono stati considerati otto differenti
rapporti di carico (R = Kmin/Kmax, da 0,1 a 0,8) ed è stato sviluppato un modello basato
sulle reti neurali artificiali. A seconda del problema da risolvere è possibile scegliere in
modo opportuno la struttura della rete e il tipo di funzioni di attivazione. Il caso allo studio
è un tipico problema di interpolazione dei dati; per tale classe di problemi un utile
142
Risultati ed analisi
strumento è rappresentato dalle reti neurali radial basis. Una tipica funzione radial basis è
la funzione gaussiana:
(
φ ( r ) = exp − r
2
2σ 2
)
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
-3
-2
-1
0
1
2
3
Figura 105: Funzione di trasferimento radial basis.
Ora, sia dato un insieme di vettori di ℜ n , { yi } ,i = 1,K ,M , che rappresentino ad esempio le
misure sperimentali di una grandezza fisica determinate in M differenti condizioni,
rappresentate da M valori distinti di un parametro R (nel caso qui analizzato, il rapporto di
carico). Le reti neurali radial basis permettono di approssimare la funzione F : R → ℜ n che
lega il generico valore di R al corrispondente vettore di valori y :
yk = F ( Rk )
La struttura della rete radial basis ha due strati di neuroni: il primo strato è caratterizzato da
una matrice di pesi W 1 di dimensione ( M × S1) . L’ingresso dello strato è dato dal vettore
R a M componenti che raccoglie gli M valori disponibili del parametro R; lo strato
genera S1 uscite nel seguente modo:
⎛ 1 M
ηh = exp ⎜ − 2 ∑ W 1( j,h ) − R j
⎜ 2σ j =1
⎝
(
)
2⎞
⎟ , h = 1,K ,S1
⎟
⎠
Il secondo strato è caratterizzato da una matrice di pesi W 2 di dimensione ( S1 × n ) . Esso
riceve in ingresso le S1 uscite dello strato radial basis e produce un’uscita costituita da un
vettore a n componenti nel seguente modo:
⎡ η1 ⎤
$y = W 2 ⎢ M ⎥
⎢ ⎥
⎢⎣ηS1 ⎥⎦
143
Risultati ed analisi
L’addestramento della rete deve determinare le matrici dei pesi del primo e secondo strato,
una volta stabilita la dimensione S1 dello strato radial basis. Questo viene ottenuto
minimizzando la distanza tra l’uscita $y prodotta dalla rete e i valori sperimentali { yi } , che
costituiscono il training set.
La procedura di implementazione della rete neurale radial basis (capitolo III) usata per il
fenomeno allo studio è basata sul Toolbox Neural Networks di Matlab. Le principali
istruzioni utilizzate sono riportate di seguito:
R=[0.1 0.2 0.3 0.4 0.5 0.7 0.8];
Y=[y1 y2 y3 y4 y5 y7 y8];
net = newgrnn(R,Y,0.08);
Rp=0.6 (valore utilizzato per la simulazione e non utilizzato nell’addestramento) ;
v = sim(net,Rp);
Le prime due istruzioni servono a creare il vettore dei valori del parametro R e la matrice
Y dei dati corrispondenti da utilizzare per il training; come si vede è stato escluso il valore
R = 0.6 ed il corrispondente vettore di dati y6 ; questo infatti sarà poi utilizzato per valutare
il potere predittivo della rete. La funzione Matlab newgrnn è quella che genera la struttura
della rete neurale radial basis e l’addestra usando il training set scelto; il valore 0.08
definisce la varianza delle funzioni radial basis. Successivamente, l’istruzione sim
da/dN
[m/ciclo]
determina l’uscita corrispondente al valore R p del parametro.
10
-6
10
-7
10
-8
10
-9
10
R = 0.1
R = 0.2
R = 0.3
R = 0.4
R = 0.5
R = 0.6
R = 0.7
R = 0.8
-10
3
10
1/2
ΔK [MPa m ]
50
Figura 106: Influenza del rapporto di carico sulla resistenza alla propagazione della cricca
di fatica nella ghisa sferoidale ferrito-perlitica EN GS 500-7.
144
Risultati ed analisi
L’influenza del rapporto di carico sulla resistenza alla propagazione della cricca di fatica in
una ghisa sferoidale ferrito-perlitica è riportata nel diagramma di figura 106.
Si può osservare una evidente influenza del rapporto di carico, con un andamento nel
diagramma da/dN-ΔK sostanzialmente convergente.
L’analisi al microscopio elettronico a scansione delle superfici di frattura evidenzia la
presenza del distacco delle particelle sferoidali di grafite dalla matrice metallica
(debonding, figura 107) e la presenza, talora piuttosto estesa, di clivaggio (figura 108) in
prossimità degli elementi di grafite (guscio ferritico).
Figura 107: Analisi al SEM: debonding (R = Figura 108:Analisi al SEM: debonding (R =
0,1; DK = 11 MPa√m).
Figura
109:
Sezione
0,1; DK= 16 MPa√m).
trasversale
della Figura 110: Sezione trasversale superficie di
superficie di frattura (R = 0,1; ΔK=11 frattura (R = 0,1; ΔK = 16 MPa√m)
MPa√m).
145
Risultati ed analisi
L’analisi delle sezioni trasversali evidenzia la presenza del debonding degli elementi di
grafite (figura 109) che, talvolta, comporta la disgregazione dell’elemento di grafite
(figura 110).
L’applicazione della procedura numerica proposta basata sulla rete neurale radial basis
consente di ottenere una elevata capacità predittiva. La simulazione applicata al valore di R
= 0,6 (non considerato nell’addestramento della rete) consente di ottenere dei risultati
da/dN
[m/ciclo]
praticamente coincidenti con quelli ottenuti sperimentalmente (figura 111).
10
-6
10
-7
10
-8
10
-9
10
R = 0,6
Risultati sperimentali
Risultati simulazione
-10
3
10
1/2
ΔK [MPa m ]
50
da/dN
[m/ciclo]
Figura 111: Confronto fra i risultati sperimentali ed i risultati della simulazione (R = 0,6).
10
-6
10
-7
10
-8
10
-9
10
R = 0,4 (sperimentale)
R = 0,45 (numerico)
R = 0,5 (sperimentale)
-10
3
10
1/2
ΔK [MPa m ]
50
Figura 112: Risultati sperimentali (R = 0,4 ed R = 0,5) e risultati della simulazione (R =
0,45).
146
Risultati ed analisi
Nel caso di un valore di R non investigato sperimentalmente (R = 0,45) ma compreso fra
due valori di R considerati nell’attività sperimentale (rispettivamente R = 0,4 e 0,5), si
ottiene una simulazione compatibile con i risultati sperimentali riportati in figura 112.
7.8 RICOSTRUZIONE TRIDIMENSIONALE DEI PROFILI DI FRATTURA.
Per ricostruire le immagini stereoscopiche delle superfici di frattura delle ghise sferoidali
sino ad ora analizzate al SEM è stato utilizzato un programma chiamato Alicona MeX . Lo
scopo di tale programma è quello di ricreare un’immagine tridimensionale partendo da
un’immagine in due dimensioni, cioè trasforma un dispositivo di misurazione in una
rappresentazione in 3D (Figura 113). In corrispondenza della medesima posizione del
provino analizzato, si ottiene una immagine stereoscopica inclinando eucentricamente il
campione intorno al proprio asse verticale e catturando due diversi immagini con un
angolo di inclinazione pari a 5°. I profili delle superfici di frattura sono stati
quantitativamente investigati come riportato in figura 114.
Figura 113: Ricostruzione tridimensionale della superficie di frattura per una ghisa
ferritio-perlitica
147
Risultati ed analisi
Figura 114: Analisi quantitativa del profilo della superficie di frattura
Sono stati investigati in questo lavoro di tesi 50 cavità o vuoti corrispondenti all’impronta
lasciata dagli sferoidi di grafite per tutte le ghise sferoidali sino ad ora considerate. Ogni
vuoto è stato geometricamente approssimato ad una sfera con i seguenti parametri
geometrici:
o profondità del vuoto “K” [μm];
o diametro del vuoto “L” [μm];
o approssimazione al diametro della sfera “D” [μm].
Le relazione tra questi parametri geometrici dipendono dal processo di “debonding”. Se
il processo di debonding degli elementi di grafite è completamente fragile si avrà
K≤
D
D
D
e L ≤ . Un processo duttile di debonding implica invece K f
e
2
2
2
Lf
D
differenziandosi comunque in funzione dell’entità del meccanismo di
2
danneggiamento.
148
da/dN
[m/cycle]
Risultati ed analisi
10
-6
10
-7
10
-8
10
-9
R = 0.1
100% F
50% F + 50% P
100% P
ADI
R = 0.5
100% F
50% F + 50% P
100% P
ADI
R = 0.75
100% F
50% F + 50% P
100% P
ADI
5
10
ΔK [MPa m1/2]
Figura 115: Influenza della microstruttura e del rapporto di carico sul meccanismo di
propagazione delle cricche di fatica.
Tuttavia i risultati relativi ai meccanismi di danneggiamento delle ghise sferoidali sino ad
ora investigate devono essere comunque correlati per una loro più approfondita
comprensione ai risultati delle prove di propagazione delle cricche di fatica riportate nel
diagramma di figura 115. Si può osservare una evidente influenza dell’effetto di chiusura
per bassi valori del rapporto di carico, mentre al di sopra di R = 0,5 non si notano
differenze evidenti nelle curve di propagazione negli stadi I (soglia) e II (propagazione
lineare) mentre permane la differenza nello stadio III (rottura di schianto). Il confronto con
le curve di propagazione caratteristiche delle ghise austemperate, mostra che la resistenza
alla propagazione della cricca di fatica risulta comparabile con quella della ghisa sferoidale
ferrito-perlitica (50% di ferrite e 50% di perlite). Non si evidenzia né un incremento del
valore di soglia (ΔK th), né una sistematica diminuzione della pendenza dello stadio lineare
per tutti i rapporti di carico, e neppure un incremento del valore di K corrispondente alla
rottura di schianto [45].
Il debonding degli elementi di grafite come evidenziato già dall’analisi al SEM per le
diverse microstrutture è caratterizzato da una morfologia che dipende dalla microstruttura e
dalla relazione tra i parametri morfologici dei vuoti (figura 116 e figura 117).
149
Diametro della sede dello sferoide "L" [μm]
Risultati ed analisi
100
80
60
40
100% F
50% F + 50% P
5% F + 95% P
ADI
20
0
0
20
40
60
80
100
Diametro della sfera di approssimazione "D" [μm]
Figura 116: Approssimazione diametro della sfera – diametro dei vuoti per le quattro
Profondità della sede dello sferoide "K" [μm]
ghise sferoidali investigate.
50
100% F
50% F + 50% P
5% F + 95% P
ADI
40
30
20
10
0
0
20
40
60
80
100
Diametro della sfera di approssimazione "D" [μm]
Figura 117: Approssimazione diametro della sfera – profondità dei vuoti per le quattro
ghise sferoidali investigate.
Quasi tutte le ghise investigate sono caratterizzate da vuoti aventi “ L > D” e quindi una
componente duttile nel meccanismo di debonding è sempre presente.
La ghisa sferoidale a matrice perlitica è caratterizzata da più bassi valori della differenza
“L-D” (un debonding completamente fragile è caratterizzato da “L-D”= 0), e una ghisa
150
Risultati ed analisi
sferoidale a matrice completamente ferritica è caratterizzata da “L-D” più elevati
(maggiore deformazione duttile durante il debonding).
La ghisa sferoidale ferrito-perlitica mostra valori “L-D” intermedi. Ciò è probabilmente
una conseguenza del differente comportamento meccanico del guscio di ferrite rispetto alla
matrice perlitica, che induce uno stato di compressione sul guscio ferritico corrispondente
a Kmin , tale cioè da ottenere in fase di chiusura dimensioni della zona plasticizzata all’apice
della cricca superiori a quelle degli sferoidi.
La ghisa sferoidale austemperata è caratterizzata da una distribuzione di risultati
sperimentali “L-D” simile alla ghisa sferoidale ferrito-perlitica, dovuto presumibilmente
alla presenza di ferrite residua intorno agli sferoidi di grafite.
Anche l’analisi della profondità dei vuoti come un’approssimazione del diametro di una
sfera “D” consente di ottenere un’analoga classificazione dell’importanza della
deformazione duttile nel meccanismo di “debonding”, ottenendo per le ghise a matrice
completamente perlitica “ K ≤
7.9
RISULTATI
OSSERVAZIONE
DELLE
AL
D
” (comportamento fragile degli sferoidi nel debonding).
2
PROVE
SEM:
DI
GHISA
TRAZIONE
EFFETTUATE
SFEROIDALE
A
CON
MATRICE
COMPLETAMENTE FERRITICA.
Il nomogramma assunto come riferimento per effettuare le prove di trazione con
osservazione della superficie al SEM su microprovini in ghisa sferoidale a matrice
completamente ferritica è riportato in figura 118. Per poter analizzare il fenomeno del
distacco degli sferoidi di grafite è stato utilizzato un procedimento per step successivi
partendo, in campo elastico, dai valori di sollecitazione riportati su nomogramma per
risalire alla deformazione (controllo di tensione) e quindi forza di trazione da imprimere,
corrispondente evidentemente (paragrafo 6.4) al numero di giri da imprimere alla vite a
brucola. In campo plastico al contrario si è partito dai valori di deformazione per risalire,
utilizzando il nomogramma, ai valori di sollecitazione ed al numero di giri da compiere
(controllo di deformazione).
In figura 119 si riportano le micrografie del comportamento alla trazione di un singolo
sferoide di grafite ottenute al SEM per step successivi corrispondentemente ai valori di
sollecitazione e deformazione imposti.
151
Risultati ed analisi
600
500
Stress [MPa]
400
300
200
100
0
0,00
0,05
0,10
0,15
4,50
4,25
4,00
3,75
3,50
3,25
3,00
2,75
2,50
2,25
2,00
1,75
1,50
1,25
1,00
0,75
0,50
0,25
0,00
0,20
Strain
Figura 118: Nomogramma utilizzato per prove di trazione al SEM per una ghisa sferoidale
a matrice ferritica.
Figura 119: Analisi al SEM: comportamento a trazione per step successivi, tenendo conto
del diagramma σ ing − ε ing , del singolo sferoide di grafite in una ghisa sferoidale a matrice
completamente ferritica; analisi del comportamento in campo elastico (a)- b)), analisi del
comportamento in campo plastico (f)-s)).
152
Risultati ed analisi
Dall’osservazione della figura 119 c) si può notare come inizino ad essere presenti, al di
sopra del limite elastico (normalmente alla direzione principale di trazione), sul bordo
esterno dello sferoide di grafite, microcricche, che con l’aumentare della deformazione,
sino cioè al raggiungimento del carico di rottura, danno origine a veri e propri fenomeni di
“scollamento” dalla matrice ferritica (figura 120 e figura 121), tanto maggiori quanto sia
la degenerazione degli sferoidi di grafite. In modo particolare un danneggiamento evidente
degli sferoidi di grafite secondo una morfologia “a cipolla”, solo in corrispondenza di
elevati valori di deformazione (figura 119 e) e figura 119 f)).
a)
b)
Figura 120: Analisi al SEM della superficie di frattura: vista laterale- a) e b) evidente
distacco degli sferoidi dalla matrice metallica.
a)
b)
Figura 121: Analisi al SEM della superficie dopo la rottura di un microprovino di ghisa
sferoidale ferritica.
153
Risultati ed analisi
7.10
RISULTATI
OSSERVAZIONE
DELLE
AL
PROVE
SEM:
DI
GHISA
TRAZIONE
EFFETTUATE
SFEROIDALE
A
CON
MATRICE
COMPLETAMENTE PERLITICA.
Il nomogramma assunto come riferimento per effettuare le prove di trazione al SEM su
microprovini in ghisa sferoidale a matrice completamente perlitica è riportato in figura
122. Anche per questo tipo di ghisa è stata effettuata la prova di trazione al SEM su
microprovini di trazione per step successivi, inizialmente in campo elastico in controllo di
tensione, successivamente in campo plastico in controllo di deformazione come indicato in
alcuni step di figura 123.
900
2.50
800
2.25
700
2.00
1.75
Stress [MPa]
600
1.50
500
1.25
400
1.00
300
0.75
200
0.50
100
0.25
0
0.00
0.00 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10 0.11 0.12
Strain
Figura 122: Nomogramma utilizzato per prove di trazione al SEM per una ghisa sferoidale
a matrice perlitica.
Anche dall’analisi della figura 123 si osserva durante la prova di trazione, già in campo
elastico e per bassi valori del carico applicati, la presenza di danneggiamento all’interno
degli sferoidi di grafite [47-48]. Tuttavia alla rottura (figura 123 e)) risulta evidente una
vera e propria frantumazione dello sferoide di grafite, peraltro evidente anche dall’analisi
SEM della superficie di frattura dopo rottura (figura 124).
154
Risultati ed analisi
Figura 123: Analisi al SEM: comportamento a trazione per step successivi, tenendo conto
del diagramma σ ing − ε ing , del singolo sferoide di grafite in una ghisa sferoidale a matrice
completamente perlitica; analisi del comportamento in campo elastico (a)- c)), analisi del
comportamento in campo plastico (d)-f)).
La figura 124 invece mostra che in corrispondenza della frattura (vista laterale) non risulta
presente in modo evidente il fenomeno di debonding tra lo sferoide di grafite e la matrice
perlitica.
a)
b)
Figura 124: Analisi al SEM della superficie dopo la rottura di un microprovino di ghisa
sferoidale perlitica. a)Evidente frantumazione di alcuni sferoidi di grafite; b) superficie di
frattura dopo rottura.
155
Risultati ed analisi
a)
b)
Figura 125: Analisi al SEM della superficie vista laterale dopo la rottura di un
microprovino di ghisa sferoidale perlitica. a) cricca generatasi all’interno della matrice
perlitica; b) assenza di debonding.
7.11
RISULTATI
DELLE
PROVE
DI
TRAZIONE
EFFETTUATE
CON
OSSERVAZIONE AL SEM: GHISA SFEROIDALE A MATRICE FERRITOPERLITICA.
Il nomogramma assunto come riferimento per effettuare le prove di trazione al SEM su
microprovini in ghisa sferoidale a matrice completamente perlitica è riportato in figura
126. Anche per questo tipo di ghisa è stata effettuata la prova di trazione al SEM su
microprovini di trazione per step successivi, inizialmente in campo elastico in controllo di
tensione, successivamente in campo plastico in controllo di deformazione come indicato in
alcuni step di figura 127. Durante la prova di trazione gli sferoidi di grafite di Una ghisa
ferrito-perlitica è caratterizzata da una peculiare distribuzione delle fasi, presentando gusci
ferritici intorno agli sferoidi di grafite immersi in una matrice perlitica. Per tali famiglie di
ghise risulta assente in campo elastico un evidente danneggiamento (microcricche, vuoti,
figura 128 a)). In campo plastico si verifica un innesco della cricca essenzialmente in
corrispondenza degli sferoidi di grafite ed una deformazione plastica della matrice
metallica (gusci ferritici, figura 128b). In corrispondenza di valori crescenti di
deformazione si ha propagazione della cricca ed ulteriore nuovo innesco all’interno dello
sferoide di grafite con deformazione plastica dei gusci ferritici. Non si osserva quindi un
evidente debonding all’interfaccia matrice-sferoide.
156
Risultati ed analisi
700
2.50
2.25
600
2.00
Stress [MPa]
500
1.75
1.50
400
1.25
300
1.00
0.75
200
0.50
100
0.25
0
0.00
0.00
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
0.11
0.12
Strain
Figura 126: Nomogramma utilizzato per prove di trazione al SEM per una ghisa sferoidale
a matrice ferrito-perlitica.
Figura 127: Analisi al SEM: comportamento a trazione per step successivi, tenendo conto
del diagramma σ ing − ε ing , del singolo sferoide di grafite in una ghisa sferoidale a matrice
ferrito-perlitica; analisi del comportamento in campo elastico (a)- b)), analisi del
comportamento in campo plastico (c-d)).
157
Risultati ed analisi
7.12
RISULTATI
OSSERVAZIONE
DELLE
AL
PROVE
SEM:
DI
TRAZIONE
GHISA
EFFETTUATE
SFEROIDALE
A
CON
MATRICE
PREVALENTEMENTE FERRITICA.
Il nomogramma assunto come riferimento per effettuare le prove di trazione al SEM su
microprovini in ghisa sferoidale a matrice completamente perlitica è riportato in figura
130. Anche per questo tipo di ghisa è stata effettuata la prova di trazione al SEM su
microprovini di trazione per step successivi, inizialmente in campo elastico in controllo di
tensione, successivamente in campo plastico in controllo di deformazione come indicato in
alcuni step di figura 131.
4.50
4.25
4.00
3.75
3.50
3.25
3.00
2.75
2.50
2.25
2.00
1.75
1.50
1.25
1.00
0.75
0.50
0.25
0.00
500
Stress [MPa]
400
300
200
100
0
0.00
0.05
0.10
0.15
0.20
0.25
Strain
Figura 130: Nomogramma utilizzato per prove di trazione al SEM per una ghisa sferoidale
a matrice prevalentemente ferritica ( 70% ferrite e 30% perlite).
Tale ghisa sferoidale è caratterizzata da una differente evoluzione del danneggiamento che
risulta peraltro assente in campo elastico. In campo plastico il danneggiamento si evolve
sia nella matrice (sostanzialmente nella ferrite) con un evidente deformazione plastica, sia
all’interfaccia matrice metallica – elemento di grafite, con un debonding che inizia sul
guscio più esterno del nodulo e che propaga implicando un suo completo debonding.
158
Risultati ed analisi
Figura 131: Analisi al SEM: comportamento a trazione per step successivi, tenendo conto
del diagramma σ ing − ε ing , del singolo sferoide di grafite in una ghisa sferoidale a matrice
ferrito-perlitica (/0% ferrite 30% perlite); analisi del comportamento in campo elastico (a)b)), analisi del comportamento in campo plastico (c-d)).
Ciò risulta anche evidente dall’analisi al SEM della superficie laterale di frattura
il
debonding degli sferoidi con rottura della matrice perlitica (figura 132 a),b) figura 133 a),
b) e c),).
a)
b)
Figura 133: Analisi al SEM della superficie dopo la rottura di un microprovino di ghisa
sferoidale ferrito-perlitica (70% ferrite e 30% perlite):a) Evidente debonding; b) superficie
di frattura dopo rottura.
159
Risultati ed analisi
a)
b)
c)
Figura 132: Analisi al SEM della superficie vista laterale dopo la rottura di un
microprovino di ghisa sferoidale ferrito-perlitica (70% ferrite e 30% perlite) a) presenza di
debonding; b) presenza di debonding e rottura della matrice perlitica; c) evidente
debonding.
160
Confronti e commenti
CAPITOLO VIII
CONFRONTI E COMMENTI
8.1 CONFRONTO DEL COMPORTAMENTO A FATICA DELLE GHISE
SFEROIDALI FERRITICHE, PERLITICHE E FERRITO-PERLITICHE.
I risultati delle prove di propagazione della cricca di fatica effettuate sulle ghise sferoidali
a matrice ferritica (100%F e 70%F + 30%P), perlitica (100%P) e ferrito-perlitica (50%F +
50%P) per tre differenti rapporti di carico (R=0,1, R=0,5 e R=0,75) sono rispettivamente
rappresentati nelle figure 134, 135 e 136. Le curve di propagazione risultano decisamente
influenzate dalla matrice metallica, in modo particolare in corrispondenza di elevati valori
di R e del ΔK applicato. Infatti, per valori bassi del rapporto di carico (R=0,1), le curve di
propagazione risultano praticamente sovrapposte sia in prossimità della zona di soglia, sia
per valori di ΔK, più elevati, ovvero nella zona di Paris e nella zona di schianto (figura
134).
Per valori del rapporto di carico più elevati, già per R=0,5, si può osservare che il valore
della soglia risulta indipendente dalla matrice, mentre nella zona di Paris si osserva una
pendenza della curva che cresce passando da una matrice ferrito-perlitica, ad una ferritica,
ad una perlitica. Tale comportamento diviene più evidente al crescere del valore di R.
In figura 136 si può osservare l’andamento per R = 0,75. La sostanziale indipendenza
delle curve di propagazione dalla natura della matrice metallica per bassi valori del
rapporto di carico e per bassi valori del ΔK applicato è dovuto, presumibilmente, alle
dimensioni della zona plasticizzata all’apice della cricca che, per le condizioni di
161
Confronti e commenti
sollecitazione sopra citate, risultano dello stesso ordine di grandezza degli sferoidi di
grafite (aventi un diametro medio compreso fra 100 e 200 μm, [45]).
Dato che gli sferoidi costituiscono una vera e propria soluzione di continuità della matrice
metallica, si ottiene una redistribuzione delle sollecitazioni dipendente più dalla densità e
dalle dimensioni medie degli sferoidi stessi, piuttosto che dall’effettivo comportamento
meccanico della matrice metallica, sia essa ferritica, perlitica o ferrito-perlitica.
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
100% F
70% F + 30% P
50% F + 50% P
100% P
-9
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 134: Risultati delle prove di fatica per le quattro ghise (R=0,1).
-6
10
-7
da/dN
[m/ciclo]
10
-8
10
100% P
50% P + 10% F
30% P + 70% F
100% F
-9
10
10
-10
3
10
ΔK [MPa m1/2]
50
Figura 135: Risultati delle prove di fatica per le quattro ghise (R=0,5).
162
Confronti e commenti
-6
da/dN
[m/ciclo]
10
-7
10
-8
10
100% F
70% F + 30% P
50% F + 50% P
100% P
-9
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 136: Risultati delle prove di fatica per le quattro ghise (R=0,75).
Presumibilmente, per le suddette condizioni di applicazione del carico, il fattore di
intensificazione degli sforzi K non è in grado di descrivere adeguatamente il reale
andamento delle sollecitazioni all’apice della cricca. Invece, per elevati valori del rapporto
di carico e di ΔK applicato, e, quindi, di Kmax applicato, aumentando la dimensione della
zona plasticizzata, si ha che gli sferoidi, sebbene sempre presenti, risultino di minore
importanza. Il fattore K è di nuovo in grado di descrivere compiutamente l’andamento
delle sollecitazioni all’apice della cricca e le curve di propagazione risultano nuovamente
dipendenti dalla matrice metallica (figura 137).
-6
da/dN
[m/cycle]
10
-7
10
-8
10
R = 0.1 100% F
R = 0.5
R = 0.75
R = 0.1 100% P
R = 0.5
R = 0.75
R = 0.5 50% F + 50% P
R = 0.1
R = 0.75
-9
10
-10
10
3
10
ΔK [MPa m1/2]
50
Figura 137: Confronto dei risultati ottenuti per ghise sferoidali a matrice completamente
ferritica, perlitica e ferrito-perlitica per tutti i rapporti di carico considerati .
163
Confronti e commenti
a)
b)
c)
d)
Figura 138: Analisi al SEM delle superfici di frattura per diversi rapporti di carico per
tutte e quattro le ghise sferoidali. a) ghisa sferoidale a matrice completamente ferritica
analizzata per rapporto di carico R=0,75 a ΔK=8 MPa m1/2: evidente debonding; b)
ghisa sferoidale a matrice perlitica analizzata per rapporto di carico R=0,75 a ΔK=10
MPa m1/2 morfologia di frattura a delta di fiume; c) ghisa sferoidale a matrice
prevalentemente ferritica (90% F+ 10%P) analizzata per rapporto di carico R=0,5 a
ΔK=10 MPa m1/2: debonding e clivaggio della frazione di perlite.
Dal confronto delle analisi al SEM delle superfici di frattura (figura 138) risulta chiaro che
per tutte le ghise analizzate, si può evidenziare una sostanziale indipendenza della
superficie di frattura dal rapporto di carico. La cricca di fatica tende a propagarsi
all’interno della matrice metallica, senza evidenziare alcun percorso preferenziale. Il
distacco degli sferoidi risulta essere più frequente e completo nel caso di matrice ferritica o
ferrito-perlitica. In quest’ultimo caso il distacco dello sferoide avviene comunque con il
guscio di ferrite che risulta spesso rotto per clivaggio. Nel caso della ghisa sferoidale
ferrito-perlitica, la resistenza alla propagazione della cricca di fatica risulta migliorata
grazie alla morfologia composita (sferoide, guscio ferritico, matrice perlitica) che, nel
164
Confronti e commenti
corso della propagazione stessa permette un incremento dell’effetto di chiusura dovuto alla
plasticizzazione dell’apice stesso.
Col fine di evidenziare l’influenza del rapporto di carico sulla resistenza alla propagazione
della cricca di fatica in una ghisa sferoidale ferrito-perlitica, sono state poi effettuate prove
di propagazione in condizioni di ampiezza di carico costante, considerando otto differenti
rapporti di carico (R = Kmin/Kmax, da 0,1 a 0,8) ed è stato sviluppato un modello basato
sulle reti neurali artificiali (radial basis) in grado di simulare l’influenza del rapporto di
carico. Dai risultati dell’attività sperimentale e numerica è possibile dedurre che:
-
il rapporto di carico ha una decisa influenza sulla propagazione della cricca di
fatica;
-
fra i meccanismi di avanzamento, vanno evidenziati il debonding degli sferoidi di
grafite ed il clivaggio dei grani di ferrite in prossimità degli elementi di grafite; in
alcune occasioni gli elementi di grafite sono stati disgregati.
-
la procedura di simulazione basata sulla rete neurale radial basis è risultata in grado
di simulare in maniera ampiamente soddisfacente l’influenza del rapporto di carico
sulle curve di avanzamento della cricca di fatica nel diagramma da/dN-ΔK (figura
da/dN
[m/ciclo]
139).
10
-6
10
-7
10
-8
10
-9
10
R = 0,6
Risultati sperimentali
Risultati simulazione
-10
3
10
1/2
ΔK [MPa m ]
50
Figura 139: Confronto fra i risultati sperimentali ed i risultati della simulazione (R = 0,6).
165
Confronti e commenti
8.2 CONFRONTO DEL COMPORTAMENTO A FATICA DELLE GHISE
AUSTEMPRATE
RISPETTO
ALLE
GHISE
SFEROIDALI
FERRITICHE,
PERLITICHE E FERRITO-PERLITICHE.
Dai risultati di fatica ottenuti nel VII, paragrafo 7.6 si è potuto evincere che relativamente
alle ghise austemperate denominate ADIA ed ADIB (caratterizzate da una differente
nodularità e cioè una maggiore degenerazione degli sferoidi di grafite per la ghisa ADIA)
che per tutti i valori di R considerati, le due ghise hanno un comportamento praticamente
identico negli stadi II e III della propagazione della cricca di fatica (rispettivamente
propagazione lineare, ove è valida la relazione di Paris, e la rottura di schianto), mentre vi
sono delle differenze nello stadio I (soglia, ΔKth). La ghisa ADIA, ovvero quella
caratterizzata da una minore solidità e da una maggiore eccentricità (paragrafo 7.1.2) degli
elementi di grafite, è caratterizzata da valori inferiori del ΔK th rispetto alla ghisa ADIB
per tutti e tre i rapporti di carico investigati.
da/dN
[m/ciclo]
10
-6
10
-7
10
-8
10
-9
10
100% P
50% P + 50% F
100% F
ADIA
ADIB
-10
3
10
ΔK [MPa m1/2]
50
Figura 140: Confronto del comportamento a fatica delle ghise ADIA ed ADIB e delle
ghise sferoidali GSA GSB E GSC per rapporto di carico R=0,1.
Dal confronto poi, del comportamento a fatica delle ghise austemprate investigate con le
ghise sferoidali a matrice ferritica, perlitica e ferrito-perlitica (figure 140-141-142) si può
osservare un’evidente influenza dell’effetto di chiusura per bassi valori del rapporto di
carico, mentre al di sopra di R = 0,5 non si notano differenze evidenti nelle curve di
propagazione negli stadi I (soglia) e II (propagazione lineare) mentre permane la differenza
166
Confronti e commenti
nello stadio III (rottura di schianto). Il confronto con le curve di propagazione
caratteristiche delle ghise austemperate mostra che la resistenza alla propagazione della
cricca di fatica risulta comparabile con quella della ghisa sferoidale ferrito-perlitica (50%
di ferrite e 50% di perlite). Non si evidenzia né un incremento del valore di soglia (ΔKth),
né una sistematica diminuzione della pendenza dello stadio lineare per tutti i rapporti di
carico (figura 142), e neppure un incremento del valore di ΔK corrispondente alla rottura
da/dN
[m/ciclo]
di schianto.
10
-6
10
-7
10
-8
10
-9
10
100% P
50% P + 50% F
100% F
ADIA
ADIB
-10
10
3
ΔK [MPa m1/2]
50
Figura 141: Confronto del comportamento a fatica delle ghise ADIA ed ADIB e delle
da/dN
[m/ciclo]
ghise sferoidali GSA GSB E GSC per rapporto di carico R=0,5.
10
-6
10
-7
10
-8
10
-9
10
100% P
50% P + 50% F
100% F
ADIA
ADIB
-10
3
10
ΔK [MPa m1/2]
50
Figura 142: Confronto del comportamento a fatica delle ghise ADIA ed ADIB e delle
ghise sferoidali GSA GSB E GSC per rapporto di carico R=0,75.
167
Confronti e commenti
Per la caratterizzazione della matrice metallica (identificazione e quantificazione della
matrice) e per l’identificazione e la caratterizzazione morfologica dei noduli di grafite
(valutazione dello stato di degenerazione) delle ghise sferoidali investigate è stata utilizzata
una procedura di segmentazione mediante contorni attivi basato su un metodo
variazionale. In quest’ultimo caso è stata analizzata l’influenza di tale degenerazione sulla
resistenza alla propagazione della cricca di fatica e sui micromeccanismi di avanzamento. I
risultati ottenuti hanno consentito di dedurre che:
-
la procedura di analisi di immagine proposta consente una caratterizzazione
quantitativa ed oggettiva sia delle frazioni volumetriche delle fasi e dei costituenti
presenti, sia del livello di degenerazione degli elementi di grafite, evitando la
necessità di un particolare addestramento dell’operatore;
-
la matrice metallica ha una particolare influenza sulla resistenza alla propagazione
della cricca di fatica per elevati valori di R e/o di ΔK, mentre il grado di
degenerazione degli elementi di grafite influenza il comportamento a fatica solo per
bassi valori di ΔK, qualunque sia il valore di R considerato;
-
la presenza di elementi di grafite degenerati implica l’innesco di cricche secondarie
che propagano nella matrice metallica.
8.3 CONFRONTO DEI MECCANISMI DI DANNEGGIAMENTO NELLE GHISE
SFEROIDALI INVESTIGATE.
In questo lavoro di tesi sono state analizzate le superfici di frattura delle ghise sferoidali
investigate ottenute dai provini CT sottoposti a fatica per verificare i meccanismi di
danneggiamento. Le analisi SEM delle superfici di frattura hanno permesso di osservare i
meccanismi di chiusura delle cricche di fatica. Le ghise sferoidali monofasiche,
caratterizzate cioè da una matrice prevalentemente ferritica presentano in modo evidente il
meccanismo di debonding; le ghise sferoidali bifasiche sono caratterizzate da una
plasticizzazione dell’apice della cricca indotta dal differente comportamento meccanico
della ferrite-perlite o della ferrite-bainite (nelle ghise austemperate) e dalla peculiare
distribuzione delle fasi (guscio ferritico intorno agli elementi di grafite, nelle ghise ferritoperlitiche).
168
Confronti e commenti
Figure 143: Analisi al SEM della superficie di frattura (R = 0.5, ΔK = 10 MPa√m). Da
sinistra a destra: ghisa sferoidale a matrice ferritica, ferrito-perlitica, perlitica ed
austemperata. La cricca avanza da sinistra a destra.
Tali considerazioni sono state validate dalla procedura sperimentale dell’analisi
tridimensionale delle superfici di frattura. L’analisi quantitativa del profilo di frattura
(figura 137) ha confermato che il processo di debonding è caratterizzato da valori più
elevati della differenza “L-D” (rispettivamente diametro del vuoto “L” [μm] ed
approssimazione al diametro della sfera “D” [μm]) per una ghisa sferoidale ferritica,
sebbene tale differenza sia sempre maggiore di zero per tutte le ghise investigate.
Figura 144: Analisi quantitativa del profilo della superficie di frattura.
169
Confronti e commenti
Il medesimo meccanismo di danneggiamento nelle ghise sferoidali a matrice ferritica,
perlitica e ferrito-perlitica è stato confrontato in condizioni di plain stress attraverso
l’osservazione al SEM di prove di trazione effettuate su microprovini di trazione di ghisa
sferoidale ferritica, perlitica e ferrito-perlitica.
Anche in condizioni di plain stress le superfici di frattura osservate al SEM (figura 145)
dei microprovini di trazione di tutte e tre le famiglie di ghise hanno confermato che il
meccanismo di debonding è presente in modo evidente nella ghisa sferoidale a matrice
ferritica e ferrito-perlitica, mentre nella ghisa sferoidale a matrice perlitica si osserva una
vera e propria frantumazione dello sferoide di grafite e rottura per clivaggio delle matrice
perlitica.
a)
b)
c)
Figura 145: Analisi al SEM delle superfici di rottura dei microprovini dopo prova
di trazione: a) ghisa sferoidale a matrice ferritica: evidente debonding; b) ghisa
sferoidale a matrice ferrito-perlitica: evidente debonding; c) ghisa sferoidale a
matrice perlitica: evidente frantumazione di alcuni sferoidi di grafite nella matrice
perlitica.
170
Confronti e commenti
In particolare per verificare che l’osservazione di quest’ultimo fenomeno nella ghisa
sferoidale perlitica non fosse stato in qualche modo indotto dai tradizionali metodi di
preparazione metallografica (lucidatura manuale mediante lucidatrice metallografia e/o
taglio mediante troncatrice metallografia) per l’osservazione al SEM dei microprovini
sottoposti a trazione, è stata realizzata in laboratorio LaMEI una prova di rottura non
standardizzata.
Tradizionali provini uniassiali a sezione cilindrica con teste di afferraggio raccordate [48]
in ghisa sferoidale perlitica sottoposti e non a prove di trazione lenta (8% deformazione)
sono stati intagliati manualmente nel tratto utile sino ad un terzo della sezione e posti in
una cella frigorifera a -40°C per 48 ore e successivamente si è provocata loro una rottura
fragile con un colpo di martello.
In figura 146 ed in figura 147 sono riportate le superfici di rottura fragile analizzate al
SEM .
In figura 146 si riportano le superfici di frattura di provini cilindrici di ghisa sferoidale
perlitica sottoposti a rottura fragile (-40°C). In figura 146a) si osserva che le superfici
interne lasciate libere dagli elementi di grafite presentano evidenti zone di microduttilità
(generazione di “microdimples” [44]) ed in figura 146b) la presenza di sferoidi
perfettamente integri.
a)
b)
Figura 146: Analisi al SEM delle superfici frattura di provini cilindrici di ghisa sferoidale
perlitica sottoposti a rottura fragile (-40°C). a) cavità lasciate dagli sferoidi di grafite (zone
di microdimples); b) sferoidi di grafite integri
171
Confronti e commenti
a)
b)
Figura 147: Analisi al SEM delle superfici frattura di provini cilindrici di ghisa sferoidale
perlitica sottoposti a prove di trazione lenta e a rottura fragile (-40°C).a) frantumazione
degli sferoidi di graf
In figura 147 si riportano le superfici di frattura di provini cilindrici di ghisa sferoidale
perlitica sottoposti a prove di trazione lenta e a rottura fragile (-40°C).
È possibile osservare in figura 147a) una evidente frantumazione degli sferoidi di grafite
provocata presumibilmente da minore comportamento duttile nella prova di trazione della
matrice perlitica (figura 147b)).
172
Conclusioni
CONCLUSIONI
Questo lavoro di tesi nasce dalla esigenza di analizzare l’influenza della degenerazione
degli sferoidi di grafite e della microstruttura sui micromeccanismi di danneggiamento nel
processo di propagazione di cricche di fatica nelle ghise sferoidali. Tali leghe ferrose sono
caratterizzate dalla presenza di elementi sferoidali di grafite che, seppur danneggiando la
matrice metallica, grazie alla loro forma hanno una minore influenza sulla resistenza
meccanica rispetto ad elementi lamellari.
Allo scopo di poter analizzare sia l’influenza della matrice metallica, sia l’influenza degli
sferoidi, in questa tesi sono stati considerati i risultati di propagazione di cricche di fatica
in:
- quattro differenti microstrutture ferrito-perlitiche (GSA 100% ferrite, GSB 100%
perlite, GSC 50% perlite e 50% ferrite, GSD 70% ferrite e 30% perlite);
- due ghise austemperate, denominate ADIA ed ADIB, caratterizzate rispettivamente
da una maggiore e minore degenerazione degli noduli di grafite.
L’attività sperimentale ha comportato una estesa analisi quantitativa attraverso l’utilizzo di
reti neurali artificiali e sofisticate tecniche di segmentazione (mediante contorni attivi) sia
per l’individuazione automatica degli elementi metallografici di interesse sia per la
determinazione automatica della distribuzione della percentuale di ferrite e perlite nelle
ghise sferoidali ferrito-perlitiche.
Le prove di fatica per le sei ghise sferoidali investigate sono state condotte in aria secondo
la normativa ASTM considerando dapprima tre rapporti di carico (R=0,1; 0,5; 0,75) e
successivamente per una ghisa ferrito-perlitica per rapporti di carico R da 0,1 a 0,8. Per
ciascun provino, dopo la rottura a fatica, è stata effettuata una estesa osservazione della
superficie di frattura al microscopio elettronico a scansione (SEM), una analisi del profilo
di avanzamento della cricca al microscopio ottico (LOM), una analisi dei profili di frattura
con
elaborazione
tridimensionale
per
la
determinazione
dei
meccanismi
di
danneggiamento. Questi ultimi meccanismi sono stati successivamente posti a confronto in
condizioni di plain stress osservando prove di trazione al SEM di microprovini di ghisa
sferoidale ferritica, ferrito-perlitica e perlitica.
173
Conclusioni
Le curve di propagazione hanno mostrato decisamente una influenza dalla matrice
metallica, in modo particolare in corrispondenza di elevati valori di R e del ΔK applicato.
Infatti, per valori bassi del rapporto di carico (R=0,1), le curve di propagazione risultano
praticamente sovrapposte sia in prossimità della zona di soglia, sia per valori di ΔK, più
elevati, ovvero nella zona di Paris e nella zona di schianto. Per valori del rapporto di carico
più elevati, si può osservare che il valore della soglia risulta indipendente dalla matrice,
mentre nella zona di Paris si osserva una pendenza della curva che cresce passando da una
matrice ferrito-perlitica, manifestando quindi un miglior comportamento alla propagazione
delle cricca di fatica, ad una ferritica, ad una perlitica. Tale comportamento diviene più
evidente al crescere del valore di R.
Si può osservare che la ghisa sferoidale ferritico-perlitica presenta una resistenza alla
propagazione delle cricche di fatica migliorata rispetto alla ghisa sferoidale ferritica e
perlitica grazie alla morfologia composita (sferoide, guscio ferritico, matrice perlitica) che,
nel corso della propagazione stessa permette un incremento dell’effetto di chiusura dovuto
alla plasticizzazione dell’apice stesso. Per i vari valori di R investigati, in corrispondenza
dei valori più elevati di ΔK, è visibile un certo distacco dei noduli di grafite rispetto alla
matrice (“debonding”), simile (seppur meno evidente) a quello evidenziato in ghise
sferoidali a matrice prevalentemente ferritica, 70% ferrite e 30% perlite, (peraltro
completamente assente nel caso delle ghise sferoidali a matrice completamente perlitica). Il
confronto, poi con le curve di propagazione caratteristiche delle ghise austemperate hanno
mostrato che la resistenza alla propagazione della cricca di fatica risulta comparabile con
quella della ghisa sferoidale ferrito-perlitica (50% di ferrite e 50% di perlite) e tale
resistenza è tanto migliorata quanto minore è la degenerazione degli sferoidi di grafite
(ADIB) e cioè, la presenza di elementi di grafite degenerati implica l’innesco di cricche
secondarie che propagano nella matrice metallica. La validazione di tali meccanismi di
danneggiamento è stata ottenuta mediante elaborazione tridimensionale dei profili di
frattura e dal confronto delle superfici di rottura di microprovini di trazione osservati al
SEM. In modo particolare l’osservazione al SEM di tale superfici hanno evidenziato
l’assenza del debonding, ma una vera e propria frantumazione degli sferoidi di grafite
nella ghisa sferoidale perlitica, provocata presumibilmente da una minore duttilità della
matrice metallica.
Ovviamente questo lavoro di tesi non conclude in modo esaustivo la caratterizzazione
microstrutturale ed il comportamento meccanico delle ghise sferoidali.
174
Conclusioni
I risultati ottenuti in questo lavoro di tesi aprono nuove prospettive per ulteriori
approfondimenti. Anzitutto l’analisi quantitativa mediante reti neurali artificiali potrebbe
essere applicata anche per la determinazione automatica di tutte le microstrutture
caratterizzanti le ghise sferoidali. In tal modo anche le aziende metallurgiche potrebbero
usufruire di un mezzo veloce, non soggettivo e legato alla sensibilità dell’operatore di
immagini, per il riconoscimento in controllo di processo delle matrici metalliche dei getti
prodotti. Inoltre si può pensare di implementare l’analisi della morfologia di frattura delle
ghise sferoidali ottenute da prove di fatica estendendo le prove di trazione con
microprovini anche alle ghise austemperate.
175
Bibliografia
BIBLIOGRAFIA
[1] C. LABRECQUE, M. GAGNE, “Ductile iron review: fifty years of continuous
development”, Canadian Metallurgical Quarterly, 37, 1998,343-378;
[2] NORMATIVA UNI EN ISO 945 “Designazione della microstruttua della ghisa”,
Luglio, 1994;
[3] J.F. WALLACE, C. VISHNEVSKYC “ The effect of heat treatment on impact
proprieties of ductile iron, gray iron News, July, 1962.
[4] F. KEMING, M. BAIHE, Y. ZONGSEN “Cerium distribution in spheroidal graphite of
cast iron” Journal of Rare Earths, 10, 3, 1992, 208-211.
[5] NORMATIVA UNI EN ISO 1563, “Fonderia: getti di ghisa a grafite sferoidale”,
novembre 1998.
[6] J. ZUIDEMA, L. WIJNMAALEN, C. VAN ELDIJK “Fatigue of nodular cast iron”,
Fatigue 99, Pechino, 2071-2076.
[7] JIANMING LI, LI LU, MAN ON LAI, “Quantitative analysis of the irregularity of
graphite nodules in cast iron”, Materials Characterization 45, 2000, 83-88.
[8] F.IACOVIELLO, V. DI COCCO, International Conference on Fatigue Crack Paths,
Parma Italia (2003) n. 116.
176
Bibliografia
[9] M. ONSOIEN, T. SKATLAND, O. GRONG “Mechanism of graphite formation in
ductile cast iron containing cerium and lanthanum” International Journal of Cast Metals
Research, 11, 6, 1999, 319-324.
[10] S. YAMAMOTO, Y. KAWANO, Y. MURAKAMI, B. CHANG, R. Ozaki
“Producing spheroidal graphite cast iron by suspension of gas bubbles in melts” Metal
Science, 12, 5, 1978, 56-60.
[11] ASTM STANDARD A445-63T; 1985 Annual Book.
[12] ASTM STANDARD A247-67, 1985 Annual Book.
[13] NORMATIVA UNI EN ISO 945.
[14] F.D. GRINSWOLD JR, R.I. STEPHENS “Comparison of fatigue properties of
nodular cast iron production and Y-block castings” Int. J. of Fatigue, 9, 1, 1987, 3-10.
[15] K. TOKAJI, T. OGAWA, K. SHAMOTO “Fatigue crack propagation in spheroidalgraphite cast irons qith different microstrutures”, Fatigue, 16, 1994, 344-350.
[16] J. ZUIDEMA, L. WIJNMAALEN, C. VAN ELDIJK “Fatigue of nodular cast iron”,
Fatigue 99, Pechino, 2071-2076.
[17] F.D. GRINSWOLD JR, R.I. STEPHENS “Comparison of fatigue properties of
nodular cast iron production and Y-block castings” Int. J. of Fatigue, 9, 1, 1987, 3-10.
[18] K. TOKAJI, T. OGAWA, K. SHAMOTO “Fatigue crack propagation in spheroidalgraphite cast irons qith different microstrutures”, Fatigue, 16, 1994, 344-350.
[19] J. ZUIDEMA, L. WIJNMAALEN, C. VAN ELDIJK “Fatigue of nodular cast iron”,
Fatigue 99, Pechino, 2071-2076.
[20] A REFAEY, N. FATAHALLA “Effect of microstructure on properties of ADI and
low alloyed ductile iron”, J. of Materials Science, 38, 2003, 351-362.
177
Bibliografia
[21] S. CALCATERRA, G. CAMPANA, L. TOMESANI “Prediction of mechanical
properties in spheroidal cast iron by neural nerworks”, J. of Materials Processing
Technology, 104, 2000, 74-80.
[22] F. IACOVIELLO, D. IACOVIELLO, M. CAVALLINI “Analysis of stress ratio
effects on fatigue crack propagation in a sintered duplex steel by experimentation and
artificial neural network approaches”, Int. J. of Fatigue, 26, 2004, 819-828.
[23] K. JAE YOUN, S. HO JI, “Neural network applications in determining the fatigue
crack opening load”, Int. J. of Fatigue, 20, 1998, 57-67.
[24] V. VENKATESH, H.J. RACK “A neural network approach to elevated temperature
creep-fatigue life prediction”, Int. J. of Fatigue, 21, 1999, 225-233.
[25] T. KHANNA, Foundations of Neural Networks, Addison Wesley (1990).
[26] C.M.BISHOP, Neural networks for pattern recognition, Oxford: Clarendon (1995).
[27] G.L. FORESTI, C. MICHELONI, IEEE Transactions on Neural Networks, 13 (2002)
p. 1540.
[28] J.C.MASON, S.W. ELLACOTT, I.J.ANDERSON, Mathematics of neural networks:
models, algorithms and applications, Boston: Kluwer Academic (1997).
[29] A.DE SANTIS, O. DI BARTOLOMEO, D.IACOVIELLO, F.IACOVIELLO, Optimal
Binarization
of
Images
by
Neural
Networks,
Pattern
Analysis
and
Applications. (DOI 10.1007/s10044-006-0052-8: Ottobre 2006)
[30] J.LANKFORD, D.L. DAVINSON. “Fatigue crack growth threshold concept”,
Metallurgical Society of AIME.
[31] F.C. PARIS, F.ERDOGAN, “ A critical crack propagation laws”, J.Basic Eng. pp 85,
528-539.
178
Bibliografia
[32] ASTM Standard test Method for Measurements of fatigue crack growth rates (E64793), Annual Book of ASTM Standards (1993) 0301, American Society for Testing and
Materials.
[33] M. ONSOIEN, T. SKATLAND, O. GRONG International Journal of Cast Metals
Research, 11, 6, 1999, p.319.
[34] H. MORROGH, The solidification of Metals, The Iron and Steel Institute (1967),
p.238.
[35] T. SKALAND, O. GRONG, T. GRONG, Metall. Trans. A, 24A (1993) p. 2321.
[36] G.L. GRENO, J.L. OTEGUI, R.E. BOERI, International Journal of Fatigue, 21 (1999)
p.35.
[37] T.L. CAPELLETTI J.R. HORNADA, AFS Trans. 82 (1974) p.59.
[38] JAE-YOUN KANG, JI-HO SONG, Int. J. of Fatigue, 20 (1998) p.57.
[39] V. VENKATESH, H. J. RACK, Int. J. of Fatigue, 21 (1999) p.225.
[40] J.L. MOREL, S. SOLIMINI, Variational Methods in Image Segmentation,
Birkhauser, Boston 1995.
[41] T.F. CHAN, L. VESE, IEEE Trans. on Image Proc. 10 (2001) 266-277.
[42] A. DE SANTIS, O. DI BARTOLOMEO, D.IACOVIELLO, F.IACOVIELLO,
Microstrutture features identification in ferritic-pearlitic ductile iron, CompImageComputational
Methods
and
Modelling
of
Applications,
Objects
20-21
Represented
October
in
2006,
Images:
Coimbra
Fundamentales,
(Portogallo).
[43] G. AUBERT, L. VESE, “A variational method in image recovery”, SIAM J. Numer.
Analysis, vol. 34, no. 5, 1997.
179
Bibliografia
[44] F. IACOVIELLO, M. CAVALLINI “Influenza della microstruttura sulla
propagazione di cricche di fatica nelle ghise sferoidali” , La metallurgia italiana, 2000, pp
31-37.
[45] F. IACOVIELLO, M. CAVALLINI, O. Di Bartolomeo International Conference on
Fatigue Crack Paths, Parma Italia (2006) n. 116.
[46] DAI P.Q. HE Z.R. ZHENG C.M. MAO Z.Y. In situ SEM observation on the fracture
of austempered ductile iron. Materials Science and Engineering A. 2001; 319-321: 531534.
[47] BERDIN C. DONG M.J. PRIOUL C. Local approach of damage and fracture
toughness for nodular cast iron. Engineering Fracture Mechanics. 2001; 68: 1107-1117.
[48] LESOULT G. CASTRO M. LACAZE J. Solidification of spheroidal graphite cast
irons – II. Numerical simulation. Acta mater. 1998. 46(3): 997-1010.
[49] NORMATIVA UNI EN 10002-1
180
Scaricare