Capitolo 6
Equazioni di Lagrange
6.1
Motivazione
Un grave ostacolo nella applicazione diretta delle equazioni cardinali allo studio
della dinamica dei sistemi meccanici, siano essi o meno corpi rigidi, risiede nel
fatto che esse pongono l’accento sulle forze esterne al sistema meccanico. Ora,
se pensiamo ad un sistema meccanico M la cui libertà di moto sia in parte
limitata—pensiamo, ad esempio, ad un solido che trasla su un piano fisso—tra
le forze esterne vanno annoverate anche quelle che il sistema risente per effetto
della presenza del vincolo. L’esistenza di queste forze è evidente se si considera
che, per restare aderenti all’esempio appena proposto, se si sopprime il piano
di scorrimento, il solido cambierà radicalmente il suo tipo di moto, in generale.
Poiché le forze la cui esistenza non dipende dalla presenza del vincolo sono rimaste le stesse, è quantomeno plausibile che il vincolo eserciti un sistema di forze su
M. Ora, in generale, anche nei casi più favorevoli in cui le forze di natura dissipativa legate all’attrito sono assenti, le reazioni vincolari non sono note a priori,
a differenza delle forze attive che, come la gravità, sussistono indipendetemente
dal fatto che M sia vincolato o meno. I valori incogniti di queste forze, legate alla presenza dei vincoli obbligano, nel formalismo newtoniano basato sulle
equazioni cardinali, ad escogitare dei procedimenti di proiezione delle equazioni
in modo da eliminare le componenti delle reazioni vincolari e poter determinare
le equazioni di moto del sistema che siano prive delle reazioni e che, per questo
motivo, sono dette equazioni pure di moto. Le reazioni vincolari, una volta determinato il moto di M, possono essere dedotte dalle equazioni cardinali della
dinamica. Il punto cruciale è che questo processo di proiezione delle equazioni di
moto lungo direzioni ove i vincoli siano inefficaci e le reazioni vincolari assenti,
varia col problema considerato. L’uso del formalismo lagrangiano permette, al
contrario, l’eliminazione sistematica delle reazioni vincolari dalle equazioni di
moto in quanto si riduce, in buona sostanza, ad un processo di proiezione. Il
formalismo lagrangiano, nel caso in cui i vincoli siano ideali, cioè non dissipino
potenza, consente di ottenere equazioni pure di moto e dunque realizza in mo89
90
CAPITOLO 6. EQUAZIONI DI LAGRANGE
do sistematico la separazione del problema di risolvere il moto di M da quello
di determinare le reazioni vincolari in dinamica. Se questa motivazione non è
chiara si rischia di naufragare nel dettaglio dei calcoli e, in ultima analisi, di essere delusi dalla teoria in quanto, occorre dirlo subito, il formalismo lagrangiano
non fornisce un metodo di risoluzione delle equazioni differenziali che reggono il
moto di un sistema meccanico. Nelle sezioni che seguono renderemo più precise
le classi di vincoli cui il formalismo è direttamente applicabile.
6.2
Vincoli olonomi
Per poter studiare l’evoluzione di un sistema meccanico M composto da N punti
materiali o un corpo rigido o un altro sistema che sia formato da punti materiali
e corpi rigidi occorre assegnare ad ogni istante un insieme di coordinate i cui
valori permettano di individuare la configurazione di M in modo univoco. Noi
ci interesseremo del caso in cui il numero di queste coordinate è finito mentre
potremo considerare situazioni in cui M sia composto da infiniti punti materiali.
Partiamo dal sistema più semplice in cui M consiste di un punto materiale P
libero di muoversi nello spazio. Per individuare ad ogni istante in modo univoco
la configurazione di P occorre assegnare i valori delle sue tre coordinate cartesiane ortogonali (x(t), y(t), z(t)) rispetto ad un osservatore avente origine in
un punto O ed assi diretti come {ex , ey , ez }. Le tre coordinate possono essere
numeri reali qualsiasi, almeno in linea di principio. Viceversa, ad una terna ordinata di numeri reali qualsiasi si può far corrispondere un’unica configurazione
di P che può essere assunta ad un dato istante. Il vettore posizione r di P
rispetto ad O è una funzione delle coordinate scelte:
r = r(x(t), y(t), z(t)).
Quando M è formato da un numero N di punti materiali (Pi , mi ) liberi
nello spazio, occorre assegnare n = 3N coordinate indipendenti per individuare
univocamente una configurazione di M come, ad esempio, le coordinate cartesiane (xi (t), yi (t), zi (t)), con i = 1, ..., 3N dei singoli punti Pi . Ora, per i vettori
posizione ri dei punti Pi rispetto all’origine O, abbiamo
Pi − O = ri = ri (xi (t), yi (t), zi (t))
∀i = 1, ..., N.
Se ora i punti materiali di M sono vincolati a restare su un piano π, che possiamo
sempre assumere coincidente con il piano z = 0 di un osservatore di riferimento,
restando liberi per il resto, per ciascuno di essi occorre e basta conoscere ad
ogni istante di tempo due sole coordinate: xi (t) ed yi (t) e dunque il numero di
coordinate indipendenti che occorre assegnare ad ogni istante per individuare
la configurazione di M si riduce a 2N ed abbiamo
Pi − O = ri = ri (xi (t), yi (t))
∀i = 1, ..., N.
Come in precedenza, le coordinate (xi (t), yi (t)) sono numeri reali qualsiasi, almeno in linea di principio. Similmente se un punto materiale P è vincolato a
91
6.2. VINCOLI OLONOMI
muoversi su una superficie occorrono due coordinate indipendenti per individuarne la posizione. Pensiamo ad un punto mobile su una superficie sferica: in
questo caso le coordinate polari sferiche ϑ (colatitudine) e ϕ (longitudine) rappresentano un adeguato sistema di coordinate per individuare la posizione di P
sulla sfera. Osserviamo a questo proposito che, per mantenere la corrispondenza biunivoca tra i valori delle coppie (ϑ(t), ϕ(t)) e le configurazioni assunte da
P sulla superficie sferica, occorre porre delle limitazioni sui valori che possono
essere assunti da ϑ(t) e ϕ(t). Infatti occorre che ϑ ∈ [0, π] e ϕ ∈ [0, 2π), altrimenti la corrispondenza cesserebbe di essere biunivoca. Operata però questa
riduzione, permane un problema che non può essere eluso: cioè il fatto che ai
poli, dove ϑ = 0 o ϑ = π la variabile ϕ cessa di essere definita. Si tratta di
un problema inerente alla geometria sferica in quanto non è possibile utilizzare
un’unica carta coordinata per parametrizzarne l’intera superficie. Fatte salve
queste eccezioni in numero finito, possiamo dire di saper individuare una configurazione di un punto P mobile su una superficie sferica scrivendo il suo vettore
posizione, r := P − O, riferito al centro O della superficie sferica, nella forma
r := r(ϑ(t), ϕ(t)).
Anche se il significato delle coordinate cambia con la superficie S sulla quale
avviene il moto, occorrono sempre due coordinate indipendenti per individuare
la posizione di un punto P mobile su S in maniera univoca.
Possiamo ora considerare un punto materiale P mobile su una circonferenza
fissa di raggio R e centro O. Per individuare in modo univoco la posizione di
P sulla circonferenza è csufficiente assegnare un valore all’angolo ϑ che il raggio
vettore P − O forma con una direzione di riferimento, ad esempio la direzione
di ex . avremo in questo caso
P − O = r(ϑ(t)) = R[cos ϑ(t)ex + sin ϑ(t)ey ].
Più in generale, se P è mobile su una curva fissa C nello spazio euclideo tridimensionale, basta conoscere il valore dell’ascissa curvilinea s che individua la
lunghezza dell’arco di curva che porta da un punto O (origine) di C al punto P
per individuare la posizione di quest’ultimo in modo univoco, a patto di stabilire
un verso di percorrenza sulla curva C che permetta di distinguere i punti che
si ottengono muovendosi in un verso a partire da O da quelli che si ottengono
seguendo il verso opposto.
Consideriamo ora un corpo rigido B, libero di muoversi nello spazio. Per
individuarne la posizione in modo univoco ad ogni istante, occorre assegnare
la posizione di un punto solidale ad esso, ad esempio il suo centro di massa,
e l’orientazione di una terna ortonormale {e1 , e2 , e3 }, positivamente orientata
e solidale al corpo rigido. Per fissare la posizione del centro di massa G di B,
occorre e basta assegnare le sue coordinate {xG (t), yG (t), zG (t)} rispetto ad un
osservatore assoluto di origine O e base fissa, ortonormale {ex , ey , ez }. Vediamo ora quante coordinate occorre assegnare per determinare in modo univoco
l’orientazione della base mobile {e1 , e2 , e3 } rispetto alla base fissa {ex , ey , ez }.
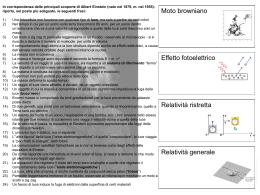
Seguiamo di descrivere la rotazione necessaria ad effettuare il passaggio tra queste due basi servendoci degli angoli di Eulero. Osserviamo anzitutto che, se
92
CAPITOLO 6. EQUAZIONI DI LAGRANGE
ez
e3
e2
ϑ
ey
G
ex
ϕ
ψ
e1
n
Figura 6.1: Angoli di Eulero {ϕ, ϑ, ψ} per individuare la posizione della terna {e1 , e2 , e3 } solidale ad un corpo rigido rispetto ad una terna assoluta
{ex , ey , ez }. Il versore n è associato alla retta dei nodi, intersezione tra il
piano fisso {ex , ey } e quello mobile {e1 , e2 }.
immaginiamo di centrare in G una terna con assi paralleli ad {ex , ey , ez }, in
generale il piano mobile {e1 , e2 } e quello fisso {ex , ey } passanti entrambi per G,
si tagliano lungo una retta r, nota come linea dei nodi, individuata dal versore
n. La posizione di questa retta sul piano {ex , ey } passante per G è individuata dall’angolo ϕ ∈ [0, 2π) che il versore n forma, ad esempio, con la direzione
di ex . Supponiamo di fissare quest’angolo e studiamo quale sia la libertà residua di movimento per la terna {e1 , e2 , e3 }. Osserviamo che i due piani per
G {e1 , e2 } ed {ex , ey } formano tra loro un angolo ϑ ∈ [0, π] che coincide con
l’angolo compreso tra le rispettive normali e3 ed ez che, in particolare, sono
ortogonali entrtambe a n. Se supponiamo di fissare anche ϑ, la base mobile
{e1 , e2 } risulta individuata una volta che sia noto l’angolo ψ ∈ [0, 2π) che e1
forma con n. Fissato il valore di quest’angolo, la base mobile {e1 , e2 , e3 } è
completamente individuata. In definitiva, occorre assegnare sei coordinate indipendenti per individuare in modo univoco la posizione di un corpo rigido B
mobile: oltre alle coordinate {xG (t), yG (t), zG (t)} del centro di massa G, occorre
determinare i tre angoli di Eulero {ϕ(t), ϑ(t), ψ(t)}: in letteratura è diffuso il
nome di angolo di precessione, per indicare ϕ, di angolo di nutazione, per ϑ e
di angolo di rotazione propria per ψ.
Possiamo sviluppare i versori {e1 , e2 , e3 } sulla base fissa {ex , ey , ez } utilizzando
gli angoli di Eulero e seguendo le rotazioni parziali necessarie a passare dalla
base fissa a quella mobile. Anzitutto, per sovrapporre ex alla retta dei nodi,
dobbiamo effettuare una rotazione attorno all’asse ez di un angolo ϕ. Se Qϕ è
il tensore ortogonale corrispondente a questa rotazione abbiamo
Qϕ
{ex , ey , ez } → {n, n⊥ , ez } .
dove
n = cos ϕex + sin ϕey
and
n⊥ = −sinϕex + cos ϕey .
93
6.2. VINCOLI OLONOMI
Per sovrapporre ez ad e3 effettuiamo una rotazione intorno ad n di un angolo
ϑ: questa operazione è possibile perché sia ez che e3 sono ortogonali a n. Se
Qϑ è il tensore ortogonale corrispondente a questa rotazione otteniamo
Q
{n, n⊥ , ez } →ϑ {n, m, e3 } :
abbiamo ora
e3 = cos ϑn − sin ϑn⊥ ,
m = sin ϑn + cos ϑn⊥ .
Infine, effettuiamo una rotazione intorno ad e3 di un angolo ψ. Se Qψ è il
tensore ortogonale corrispondente a questa rotazione abbiamo
Qψ
{n, m, e3 } → {e1 , e2 , e2 }.
dove ora
e1 = cos ψn + sin ψm
e2 = − sin ψn + cos ψm.
Non è difficile a questo punto ottenere le espressioni di e1 , e2 , e3 in termini
dei versori della base fissa e mostrare come i coefficienti dello sviluppo siano
funzioni degli angoli di Eulero. Se consideriamo un punto P qualsiasi, solidale
al corpo rigido, il suo vettore posizione rispetto a G sarà del tipo P − G =
ℓ1 e1 + ℓ2 e2 + ℓ3 e3 , dove i coefficienti ℓi sono costanti rispetto all’osservatore
solidale, dal momento che tutti i punti del corpo rigido sono in quiete rispetto
a questo osservatore. Rispetto all’osservatore assoluto avremo
P −O = x(t)ex +y(t)ey +z(t)ez +
3
X
ℓi ei (ϕ(t), ϑ(t), ψ(t)) = r(x(t), y(t), z(t), ϕ(t), ϑ(t), ψ(t)).
i=1
Questo esempio, insieme a quelli trattati in precedenza, giustifica la definizione
della seguente classe di sistemi vincolati:
Definizione 6.1 Sia dato un sistema M := {(Pi , mi ), i = 1, · · · , N } di punti
materiali; diremo che M è soggetto a vincoli olonomi se, ∀i = 1, · · · , N è possibile scrivere i vettori posizione ri dei punti Pi come funzioni di un numero finito
di coordinate indipendenti q1 (t), q2 (t), ..., qn (t) ed eventualmente del tempo:
Pi − O = r i (q1 (t), q2 (t), ..., qn (t), t)
∀i = 1, ..., N.
(6.1)
Le coordinate q1 (t), q2 (t), ..., qn (t) sono dette coordinate generalizzate o lagrangiane di M ed il numero n di coordinate lagrangiane necessario ad individuare
univocamente la posizione di M ad un istante di tempo è detto numero di gradi
di libertà del sistema.
Se esiste almeno un punto per il quale non è possibile scrivere Pi − O nella forma
(6.1), allora il sistema M è soggetto a vincoli anolonomi.
94
CAPITOLO 6. EQUAZIONI DI LAGRANGE
La dipendenza esplicita dal tempo nelle funzioni ri merita di essere un po’
approfondita. Negli esempi illustrati finora, i vettori posizione dei punti componenti i vari sistemi di punti materiali dipendevano solo implicitamente dal
tempo, attraverso la dipendenza temporale delle coordinate lagrangiane. Vediamo un esempio in cui figura una dipendenza esplicita dal tempo. Consideriamo
nel piano un punto materiale libero di muoversi su una circonferenza di centro
O fisso, il cui raggio R(t) è variabile con legge assegnata a priori: ad esempio
R(t) = R0 (1 + 21 sin ωt). Ad ogni istante la posizione di P è espressa in uno dei
due modi equivalenti
P − O = R(t)[cos ϑ(t)ex + sin ϑ(t)ey ] =
= R0 (1 + 21 sin ωt)[cos ϑ(t)ex + sin ϑ(t)ey ] = R(t)er (t)
(6.2)
dove er è il versore radiale, diretto da O verso P . La differenza tra R(t) e ϑ(t)
sta nel fatto che, mentre la prima funzione è nota a priori, la seconda dipende
dalla soluzione del problema dinamico, da come il punto P viene sollecitato.
Un vincolo olonomo in cui non vi sia dipendenza esplicita dal tempo è detto
scleronomo mentre è detto reonomo se vi è dipendenza esplicita dal tempo.
Formalmente, diremo che i vincoli cui è soggetto M sono scleronomi se
∂ri
=0
∂t
∀i = 1, ..., N
(6.3)
mentre sono reonomi se esiste almeno un valore i0 dell’indice i per il quale si
abbia
∂ri0
6= 0.
(6.4)
∂t
La presenza di vincoli olonomi ha un riflesso sulla forma dei vettori posizione
dei punti di M che debbono obbedire (6.1). Se deriviamo v i rispetto al tempo
otteniamo
n
X
∂ri
∂ri
dri
vi =
=
q̇k (t) +
(6.5)
dt
∂qk
∂t
k=1
dove l’ultimo termine è diverso da 0 solo quando esiste almeno un vincolo reonomo. L’equazione (6.5) rappresenta l’espressione generale della velocità di un
punto materiale appartenente ad un sistema soggetto a vincoli olonomi.
Nel seguito, faremo uso del concetto di atto di moto, definito come segue
Definizione 6.2 Assegnato un sistema M di punti materiali, l’atto di moto
ad un certo istante t0 rappresenta la distribuzione delle velocità dei punti che
compongono M in quell’istante.
In particolare, la (6.5) rappresenta l’atto di moto per un sistema soggetto a
vincoli olonomi.
Definizione 6.3 Un atto di moto per un sistema M è detto atto di moto possibile ad un certo istante t0 se è una distribuzione di velocità compatibile con
i vincoli cui è soggetto M ma per il resto arbitraria. Un atto di moto virtuale è una distribuzione di velocità compatibile con i vincoli cui è soggetto M,
immaginati bloccati all’istante t = t0 , per il resto arbitraria.
95
6.2. VINCOLI OLONOMI
Ripartiamo dall’esempio semplice di un punto P mobile su una circonferenza
fissa di centro O e raggio R, cosı̀ da avere
P − O = r = R[cos ϑ(t)ex + sin ϑ(t)ey ].
L’atto di moto reale, cioè quello che si realizza nel corso del moto è
v=
dr
= Rϑ̇(t)[− sin ϑ(t)ex + cos ϑ(t)ey ] :
dt
osserviamo che il versore eϑ := [− sin ϑ(t)ex + cos ϑ(t)ey ] è tangente alla circonferenza. L’atto di moto possibile è una distribuzione di velocità compatibile con
il vincolo, ma per il resto arbitraria. Poiché il vincolo impone alla velocità di
essere tangente alla circonferenza, abbiamo
v = v[− sin ϑ(t)ex + cos ϑ(t)ey ]
dove v indica uno scalare arbitrario. In questo caso non c’è alcuna distinzione
tra atto di moto possibile ed atto di moto virtuale. Al contrario, consideriamo
il sistema soggetto a vincoli reonomi (6.2). L’atto di moto reale si ottiene
derivando (6.2) rispetto al tempo: ricordando le formule di Poisson, abbiamo
v=
dR(t)
˙ ϑ.
er + R(t)ϑ(t)e
dt
Questa velocità non è tangente alla circonferenza su cui si muove il punto ma
contiene una componente radiale che riflette il trascinamento subı̀to da P ad
opera del vincolo. Nell’atto di moto possibile, poiché R(t) è nota a priori, l’unico
parametro su cui possiamo giocare per ottenere una velocità compatibile con il
vincolo è la componente tangenziale della velocità: il vettore
v=
dR(t)
er + R(t)veϑ
dt
dove v è uno scalare arbitrario, è la più generale distribuzione di velocità compatibile con il vincolo, cioè l’atto di moto possibile per P . L’atto di moto virtuale
si ottiene congelando la dipendenza esplicita dal tempo, cioè immaginando che
il vincolo sia fisso, all’istante t = t0 . In questo modo, la velocità virtuale si
ottiene annullando la dipendenza esplicita dal tempo e dunque
b = R(t0 )b
v
v eϑ
dove lo scalare vb è arbitrario. Come si vede, l’atto di moto virtuale è tangente
alla posizione del vincolo all’istante t = t0 , avendo eliminato la dipendenza
esplicita del vincolo dal tempo. Dovrebbe esser chiaro da quanto precede che la
differenza tra atto di moto possibile ed atto di moto virtuale si evidenzia solo
nel caso in cui vi siano vincoli reonomi.
Osservazione Nelle definizioni precedenti l’arbitrarietà delle quantità scalari v
b non è assoluta. Occorre supporre che le velocità non facciano violare il
e v
96
CAPITOLO 6. EQUAZIONI DI LAGRANGE
vincolo; questa osservazione è importante dal momento che, quando il sistema
si trovasse in una configurazione di confine, l’arbitrarietà è limitata in modo
significativo. Chiariamo con un esempio, supponendo che M sia formato da un
solo punto materiale P mobile all’interno di un disco fisso di raggio R e centro
O. Come coordinate lagrangiane si possono assumere le coordinate polari (r, ϑ)
aventi O come polo e con l’anomalia ϑ contata a partire dall’asse delle ascisse:
P − O = r(t)er
dove er = er (t) è il versore radiale, diretto da O a P . Ora, l’atto di moto reale
è
v = ṙ(t)er (t) + r(t)ϑ̇(t)eϑ (t)
dove abbiamo utilizzato le formule di Poisson. L’atto di moto possibile che qui
si confonde con quello virtuale, dal momento che i vincoli sono scleronomi, è
v = v r er + v ϑ e ϑ
dove gli scalari v r e v ϑ sono arbitrari nel momento in cui r < R e dunque P
può esplorare tutte le direzioni senza uscire dalla regione ammissibile r ≤ R. Al
contrario, se r(t) = R, sono ammessi solo quelle velocità virtuali tali che v r ≤ 0,
ovvero tali che la componente radiale di v non sia positiva, in modo da impedire
a P di esplorare la regione r(t) > R che è irraggiungibile per il vincolo imposto.
Configurazioni nelle quali le velocità virtuali sono soggette a queste restrizioni
sono dette configurazioni di confine e gli atti di moto sono detti non reversibili.
Ha interesse per quel che segue procurarsi l’espressione dell’atto di moto
possibile e virtuale per un sistema a n gradi di libertà, soggetto a vincoli olonomi:
partendo dall’equazione (6.5) ed osservando che i vettori ∂∂qrji sono tangenti alla
posizione del vincolo, fissato all’istante t = t0 , abbiamo
vi =
n
X
∂ri
∂ri
vk +
∂qk
∂t
(6.6)
k=1
e
bi =
v
n
X
∂ri
vbk
∂qk
(6.7)
k=1
per l’atto di moto possibile e virtuale, rispettivamente: in queste espressioni le
n quantità scalari v k o vbk sono arbitrarie in ogni configurazione ordinaria, cioè
non di confine.
6.3
Vincoli di contatto e di rotolamento
Nella sezione precedente abbiamo considerato il caso in cui un sistema meccanico
M subisse restrizioni nelle configurazioni possibili; ora eseminiamo due casi in
cui le restrizioni vengono, almeno inizialmente, imposte sulle velocità dei punti
di M.
97
6.3. VINCOLI DI CONTATTO E DI ROTOLAMENTO
ν
B1
P1
P2
B2
Figura 6.2: Corpi rigidi B1 e B2 soggetti a vincolo di contatto in P1 ≡ P2 . Il
versore ν indica la normale al piano tangente comune alle superficie dei due
corpi nel punto di contatto.
Supponiamo (Fig. 6.2) che due corpi rigidi B1 e B2 siano vincolati ad avere
in ogni istante un punto P1 appartenente alla superficie di B1 ed un punto P2
della superficie di B2 a contatto. La condizione perché ciò succeda è che, detto
ν il versore normale al piano tangente comune a B1 e B2 nel punto di contatto
P1 ≡ P2 , si abbia
(v 1 − v 2 ) · ν = 0
(6.8)
dove v 1 è la velocità istantanea di P1 , pensato come punto di B1 e v 2 quella di
P2 , pensato come punto di B2 . L’equazione (6.8) afferma che, affinché B1 e B2
restino a contatto, occorre che il moto relativo tra i due corpi nel punto P1 ≡ P2
sia diretto lungo il piano tangente comune ai due corpi, ovvero possa esserci solo
strisciamento tra i due corpi. Quando si richiede che i due corpi ròtolino senza
strisciare l’uno sull’altro bisogna impedire l’instaurarsi di questo moto relativo
e dunque richiedere, fermo restando il significato dei simboli,
v1 − v2 = 0 :
(6.9)
in questo caso si parla anche di puro rotolamento di B1 su B2 .
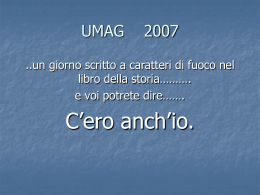
Esempio In un piano {ex , ey } (Fig. 6.3), sia dato un disco di centro C e raggio R
libero di rotolare senza strisciare su una guida orizzontale fissa r. Determinare
il numero di gradi di libertà del sistema.
ϑ
b
O
C
P
ey
ex
H
Figura 6.3: Puro rotolamento di un disco di raggio R su una guida fissa e
rettilinea. Il moto avviene nel piano {ex , ey }.
Indichiamo con x l’ascissa del centro C del disco e con ϑ l’angolo di rotazione,
cioè l’angolo che una direzione fissa di riferimento (qui la verticale ascendente
passante per C) forma con un raggio vettore di un punto P solidale al disco. Se
98
CAPITOLO 6. EQUAZIONI DI LAGRANGE
prescindessimo dal vincolo di puro rotolamento, x e ϑ sarebbero indipendenti;
non è per‘ødifficile convincersi che, ad x fissato, un movimento indipendente di ϑ
comporterebbe lo strisciamento del disco sulla guida r e dunque è incompatibile
con il puro rotolamento. Da questa considerazione informale, nasce il sospetto
che il vincolo di puro rotolamento induca un legame tra le coordinate lagrangiane
scelte. Per dar sostanza a questa supposizione troviamo due espressioni differenti
per la velocità di C: la prima, derivando rispetto al tempo la relazione C − O =
x(t)ex , fornisce
v C = ẋ(t)ex .
La seconda espressione si ottiene imponendo la formula fondamentale della cinematica relativa. Detto H il punto della circonferenza del disco che si trova
ad un certo istante a contatto con r, il puro rotolamento (6.9) impone v H = 0
e, ricordando che il moto avviene nel piano e dunque la velocità angolare del
disco è ω = ωez = −ϑ̇(t)ez a causa del verso di rotazione assunto positivo per
il disco, abbiamo
v C = v H + ω ∧ (C − H) = −Rϑ̇(t)ez ∧ ey = Rϑ̇(t)ex :
confrontando le due espressioni ottenute per v C otteniamo
ẋ(t) = Rϑ̇(t).
(6.10)
Ora, questa relazione può essere integrata rispetto al tempo ottenendo
x(t) = Rϑ(t) + C
dove C è una costante di integrazione il cui valore dipende dalle condizioni
iniziali scelte. Se scegliamo il punto P in modo che P − C = Rey quando
C ≡ O ed indichiamo con t0 l’istante in cui C passa per O, allora x(0) = 0 e
ϑ(0) = 0 e dunque la condizione di puro rotolamento diventa
x(t) = Rϑ(t).
(6.11)
Occorre dunque una sola coordinata lagrangiana, x(t) o ϑ(t) indifferentemente,
per individuare la posizione del disco.
Esempio Supponiamo che nel piano {ex , ey } un disco di centro C e raggio R
rotoli senza strisciare sulla circonferenza di un altro disco fisso di centro O di
raggio R0 > R, disposto come in figura, con C interno al disco fisso (Fig. 6.4).
Studiare tale vincolo.
Sia H il punto di contatto istantaneo tra i due dischi e sia ϑ l’angolo che
H − O forma con la verticale discendente. La velocità angolare del disco mobile
sarà del tipo ω = ωez e cerchiamo di determinare ω in termini di ϑ̇ che non
è l’angolo di rotazione del disco quanto quello del raggio vettore C − O. La
strategia è la stessa di prima. Da una parte, osserviamo che C si muove su una
circonferenza di centro C e raggio R0 − R per cui
C − O = (R0 − R)er
99
6.4. VINCOLI PERFETTI
O
ey
ex
ϑ
C
eϑ
H
er
Figura 6.4: Puro rotolamento di un disco di raggio R all’interno di un disco
fisso di raggio R0 > R. Il moto avviene nel piano {ex , ey }.
dove er = er (t) è il versore radiale che punta da O a C. Siccome la velocità
angolare del segmento C − O è ϑ̇ez ed er è solidale a questo raggio vettore, dalle
formule di Poisson ricaviamo
v C = (R0 − R)ϑ̇ez ∧ er = (R0 − R)ϑ̇eϑ
dove eϑ := ez ∧ er è un versore tangente alla circonferenza descritta da C nel
suo moto e quindi al disco fisso su cui avviene il rotolamento. D’altra parte,
applicando al disco la formula fondamentale della cinematica rigida abbiamo
v C = v H + ωez ∧ (C − H) = −ωRez ∧ er = −ωReϑ
per cui
(R0 − R)
ϑ̇ :
(6.12)
R
qualora il disco si muovesse sulla guida circolare fissa con C esterno al supporto
si avrebbe
(R0 + R)
ω=−
ϑ̇.
(6.13)
R
ω=−
6.4
Vincoli perfetti
Una distinzione ulteriore dei vincoli si basa sulla potenza dissipata da questi in
un atto di moto virtuale, secondo questa definizione
c (v) delle
Definizione 6.4 Un vincolo è detto perfetto se la potenza virtuale W
reazioni vincolari, cioè la potenza in un atto di moto virtuale del sistema, è
nulla per tutti gli atti di moto virtuali
c (v) = 0 .
W
(6.14)
Spieghiamo perché si ponga l’accento sulla potenza virtuale in questa definizione.
L’obiettivo è quello di individuare una classe sufficientemente generale di vincoli
100
CAPITOLO 6. EQUAZIONI DI LAGRANGE
per i quali sia possibile eliminare ogni riferimento alle reazioni vincolari nelle
equazioni di moto. Il pensiero corre allora subito ai vincoli che non dissipano
potenza nel corso di ogni moto possibile che, con qualche notevole eccezione,
possono essere pensati, per fissare le idee, come vincoli in cui è assente ogni
forma di attrito.
x(t)
ey
ex
b
P
h(t)
O
Figura 6.5: Illustrazione del concetto di potenza virtuale. Il punto P è mobile,
in assenza di attrito, su una guida orizzontale che trasla nella direzione verticale
con legge oraria h = h(t) assegnata.
Consideriamo un punto materiale P mobile Fig. (6.5) su una guida orizzontale che non offra attrito alcuno e supponiamo che il moto avvenga nel piano
{ex , ey }. La reazione vincolare che P sperimenta per effetto della presenza della
guida in questo caso ideale è Φ = φey , se ex indica la direzione della guida.
È chiaro che, in questo caso, non solo la potenza effettiva, che si realizza nel
corso del moto, ma ogni potenza possibile cioè sviluppata in un atto di moto possibile qualsiasi è nulla in quanto v P = vex , con v arbitrario e quindi
(v)
W
= Φ · v = 0. In questo caso, in cui il vincolo è scleronomo, abbiamo ovvia(v)
c (v) = 0. Supponiamo ora che, ferme restando le proprietà del
mente W
=W
contatto tra P e la guida, quest’ultima venga fatta traslare lungo la direzione
ey con legge oraria assegnata: ad esempio, h(t) = h0 (1 + 12 sin ωt). La posizione
di P rispetto ad un’origine fissa è
P − O = x(t)ex + h(t)ey
dove, ancora una volta, x(t) è un’incognita che dipende dalle condizioni iniziali
e dalla sollecitazione cui è sottoposto il punto P , mentre h(t) è nota a priori.
Poiché v P = ẋ(t)ex + ḣ(t)ey , l’atto di moto possibile è
v P = vex + ḣ(t)ey
ed ora la potenza possibile delle reazioni vincolari è
W
(r)
= Φ · v P = ḣ(t)Φ 6= 0
bP = b
mentre la potenza virtuale, essendo v
v ex è nulla e quindi, richiedere perfezione del vincolo nel senso della definizione (6.4) permette di eliminare il riferimento alla reazione vincolare nel calcolo della potenza. Questo fatto sarà
sfruttato nella prossima sezione per dedurre delle equazioni pure di moto, in cui
cioè sono assenti le reazioni vincolari.
101
6.5. EQUAZIONI DI LAGRANGE
6.5
Equazioni di Lagrange
Seguiamo la via tradizionale che fa discendere le equazioni di Lagrange per un
sistema composto da N punti materiali (Pi , mi ) dotati di n ≤ 3N gradi di
libertà dall’ipotesi di vincoli olonomi e perfetti. La prima ipotesi permette di
scrivere i vettori posizione ri dei punti materiali rispetto ad un’origine fissata
O nella forma (6.1), dove la dipendenza esplicita dal tempo viene mantenuta,
volendo abbracciare sia i vincoli scleronomi che quelli reonomi. Come accennato
nell’introduzione al capitolo, l’ipotesi di vincoli perfetti consente di ottenere
equazioni pure di moto, in cui non figurano reazioni vincolari. Per determinare
le reazioni vincolari nel corso del moto si può far ricorso, una volta determinato
esplicitamente il moto del sistema, alle equazioni cardinali della dinamica.
Partiamo allora dalle equazioni di moto per i punti Pi
mi ai = F i + ϕi
i = 1, ..., N
dove F i indica la forza attiva risultante agente su Pi e ϕi la forza reattiva
risultante agente su Pi . Se moltiplichiamo scalarmente ogni equazione di moto
per la velocità virtuale (6.7) v̂ i del corrispondente punto materiale otterremo
mi ai · v̂ i = F i · v̂ i
(6.15)
dove non figurano contributi delle forze reattive, grazie all’ipotesi di perfezione
dei vincoli. Se sommiamo le N equazioni (6.15) e sostituiamo l’espressione (6.7)
delle velocità virtuali, arriviamo a
N X
n
X
N
mi a i ·
i=1 j=1
n
XX
∂ri
∂r i
v̂j =
Fi ·
v̂j .
∂qj
∂qj
i=1 j=1
(6.16)
Definiamo la j-esima componente generalizzata delle forze Qj come
Qj :=
N
X
i
Fi ·
∂r i
:
∂qj
(6.17)
con questa definizione possiamo riscrivere (6.16) nella forma
N X
n
X
i=1 j=1
n
mi ai ·
X
∂ri
v̂j =
Qj v̂j
∂qj
j=1
(6.18)
e procedere esaminando la struttura del membro di sinistra. Anzitutto osserviamo che, se j è un indice qualsiasi j = 1, ..., n,
∂ri
∂v i
=
:
∂qj
∂ q̇j
(6.19)
è sufficiente derivare (6.5) rispetto a q̇k , osservare che le funzioni r i non dipendono dalle q̇k e che ∂∂q̇q̇kj = δjk .
102
CAPITOLO 6. EQUAZIONI DI LAGRANGE
Notiamo ancora che
∂ri
∂ri
d
ai ·
= v̇ i ·
=
∂qj
∂qj
dt
∂r i
d ∂r i
vi ·
− vi ·
,
∂qj
dt ∂qj
dove nell’ultimo passaggio abbiamo usato la regola di derivazione del prodotto.
Se ora deriviamo (6.5) rispetto a qj otteniamo
n
X
∂v i
∂ 2ri
∂ 2 ri
d ∂r i
=
q̇k +
=
,
∂qj
∂qj ∂qk
∂t∂qj
dt ∂qj
k=1
come si può verificare ricordando la definizione di derivata totale di una funzione.
In definitiva, usando (6.19) possiamo scrivere
∂r i
d
∂vi
∂v i
ai ·
=
vi ·
− vi ·
∂qj
dt
∂ q̇j
∂qj
che, sostituita in (6.18), fornisce
n X
N X
j=1 i=1
mi
d
dt
X
n
∂vi
∂v i
Qj v̂j .
vi ·
− vi ·
v̂j =
∂ q̇j
∂qj
j=1
(6.20)
Per procedere, ricordiamo che l’energia cinetica di un sistema di N punti materiali ha l’espressione
N
1X
T =
mi v i · v i
2 i=1
per cui abbiamo
d
dt
e
∂T
∂ q̇j
N
X
d
=
mi
dt
i=1
∂v i
vi ·
∂ q̇j
N
X
∂T
∂v i
=
mi v i ·
.
∂qj
∂qj
i=1
Sostituendo queste espressioni in (6.20) otteniamo
n X
d ∂T
∂T
−
− Qj v̂j = 0 .
dt ∂ q̇j
∂qj
j=1
Poiché queste equazioni debbono valere per tutte le scelte delle quantità v̂j ,
mutuamente indipendenti, deve essere
d ∂T
∂T
−
− Qj = 0 ∀j = 1, ..., n.
(6.21)
dt ∂ q̇j
∂qj
È chiaro che in questo passaggio si sta supponendo di non trovarsi in una configurazione di confine, altrimenti l’arbitrarietà degli scalari v̂j non sarebbe completa.
103
6.5. EQUAZIONI DI LAGRANGE
Osservazioni. Supponiamo che le forze F i siano conservative, cioè esistano
funzioni Vi tali che
F i = −∇Vi ∀i = 1, ..., N .
In questo caso è possibile dare una forma compatta alle Qj e scrivere le equazioni di Lagrange in una forma più compatta. Se {xi , yi , zi } sono le coordinate
cartesiane dell’i-esimo punto materiale del sistema, possiamo scrivere
r i = xi (q1 , ..., qn )ex + yi (q1 , ..., qn )ey + zi (q1 , ..., qn )ez ;
Poiché
∇Vi =
∂Vi
∂Vi
∂Vi
ex +
ey +
ez
∂xi
∂yi
∂zi
abbiamo
P
PN
∂xi (q1 ,...,qn )
∂ ri
Qj = N
ex +
i=1 F i · ∂qj = −
i=1 ∇Vi · [
∂qj
=−
PN
∂Vi ∂xi (q1 ,...,qn )
i=1 ∂xi
∂qj
+
∂Vi ∂yi (q1 ,...,qn )
∂yi
∂qj
+
∂yi (q1 ,...,qn )
ey
∂qj
∂Vi ∂zi (q1 ,...,qn )
∂zi
∂qj
= − ∂q∂ j
+
∂zi (q1 ,...,qn )
ez ]
∂qj
PN
i=1
Vi ,
dove l’ultimo passaggio è conseguenza della regola di derivazione per funzioni
composte. Se definiamo l’energia potenziale totale V come
V (q1 , ..., qn ) :=
N
X
Vi
i=1
possiamo infine scrivere
Qj = −
∂V
∂qj
∀ j = 1, ..., n.
Poiché la funzione V non dipende dalle velocità generalizzate, deve essere anche
∂V
= 0 ∀j = 1, ..., n;
∂ q̇j
introdotta la funzione lagrangiana L := T − V , poiché
∂T
∂L
=
∂ q̇j
∂ q̇j
possiamo riscrivere le equazioni di Lagrange nella forma
d ∂L
∂L
=
∀j = 1, ..., n .
dt ∂ q̇j
∂qj
(6.22)
Supponiamo ora che una delle coordinate, ad esempio qj per un certo valore di j, non compaia esplicitamente nell’espressione di L. La corrispondente
equazione di Lagrange diventa
d ∂L
=0
dt ∂ q̇j
=
104
CAPITOLO 6. EQUAZIONI DI LAGRANGE
da cui segue che
pj :=
∂L
= costante :
∂ q̇j
l’analisi della funzione L è dunque un mezzo rapido per ottenere delle quantità
che si conservano nel corso del moto. Una coordinata qj che non compare
esplicitamente in L è detta coordinata ciclica od ignorabile e la corrispondente
quantità conservata pj è detta momento canonicamente coniugato a qj . È anche
possibile dimostrare che, se L non dipende esplicitamente dal tempo, cioè se
∂L
∂t = 0, allora la quantità
H :=
n X
∂L
j=1
∂ q̇j
q̇j − L
è costante nel corso del moto. La quantità H è detta hamiltoniana del sistema
ed in molti casi coincide con l’energia meccanica totale del sistema. Dunque
il formlismo lagrangiano è in grado di fornire immediatamente le espressioni
degli integrali primi del moto purché si sappia individuare una variabile ciclica.
Il significato fisico di questi integrali primi può essere desunto dalle leggi di
conservazione dedotte in precedenza.
Osservazione. Abbiamo scritto le equazioni (6.22) per una scelta particolare
di coordinate {q1 , ...qn }. Se avessimo deciso di descrivere il sistema attraverso
un’altra scelta di n coordinate lagrangiane {u1 , ..., un } legate alle {q1 , ...qn } da
una trasformazione invertibile, le equazioni di Lagrange avrebbero assunto la
forma
d ∂L
∂L
=
∀j = 1, ..., n
dt ∂ u̇j
∂uj
del tutto analoga a quella (6.22). Concludiamo cosı̀ che le equazioni di Lagrange
si scrivono allo stesso modo, qualunque sia la scelta di coordinate operata.
Osservazione. Il vincolo di puro rotolamento richiede la presenza di attrito tra i
corpi che rotolano senza strisciare uno sull’altro. Nonostante questo, il vincolo di
puro rotolamento è perfetto perché la velocità relativa tra i due corpi a contatto
è nulla e quindi la potenza virtuale risulta nulla.
Osservazione. Altre forze per le quali è possibile fornire un’espressione compatta
delle Qj sono le forze viscose, cioè forze del tipo
F i = −γi v i
che si oppongono al moto del punto materiale i-esimo. I coefficienti γi > 0 sono
dei coefficienti di viscosità. L’espressione delle Qj corrispondenti a forze viscose
è, ricordando che ∂∂qrji = ∂∂vq̇ji ,
N
X
N
N
X
∂ri
∂vi
1 ∂ X
Qj =
Fi ·
= Qj = −
γi v i ·
=−
γi vi2 ,
∂q
∂
q̇
2
∂
q̇
j
j
j i=1
i=1
i=1
105
6.5. EQUAZIONI DI LAGRANGE
dove vi2 = v i ·v i . Introducendo la funzione di dissipazione o funzione di Rayleigh
R definita come
N
X
γi 2
R :=
v
2 i
i=1
abbiamo
Qj = −
∂R
.
∂ q̇j
Come prima applicazione del formalismo lagrangiano, diamo una caratterizzazione delle configurazioni di equilibrio ordinarie per sistemi soggetti a vincoli
olonomi e perfetti, premettendo la seguente
Definizione 6.5 Una configurazione ordinaria di un sistema olonomo a vincoli
perfetti corrispondente ai valori q1 = q10 , q2 = q20 ,..., qn = qn0 delle coordinate
lagrangiane {q1 , ...qn } è detta di equilibrio se, posto il sistema inizialmente nella
configurazione {q10 , ...qn0 } in quiete, il sistema vi permarrà in quiete in tutti gli
istanti successivi.
Formalmente, se t = 0 è l’istante iniziale, una configurazione {q10 , ...qn0 } è di
equilibrio se, sapendo che
q1 (0) = q10 , ...., qn (0) = qn0
q̇1 (0) = 0, ...., q̇n (0) = 0
avremo
q1 (t) ≡ q10 , ..., qn (t) ≡ qn0 ∀t ≥ 0 .
Se un sistema è in quiete in una configurazione di equilibrio q1 = q10 , q2 = q20 ,...,
qn = qn0 allora la sua energia cinetica è nulla e dalle equazioni di Lagrange (6.21)
segue che
Qj (q10 , q20 , ..., qn0 ) = 0 ∀j = 1, ..., n;
Viceversa, se Qj = 0 in una configurazione q1 = q10 , q2 = q20 ,..., qn = qn0 e se le
equazioni di Lagrange ammettono un’unica soluzione quando sono specificati i
valori delle qi e delle q̇i all’istante iniziale, poiché
q1 (t) ≡ q10 , ..., qn (t) ≡ qn0
è soluzione delle equazioni di Lagrange, la configurazione q1 = q10 , q2 = q20 ,...,
qn = qn0 è di equilibrio. Pertanto abbiamo caratterizzato le configurazioni di
equilibrio per un sistema olonomo come i punti tali che
Qj (q10 , q20 , ..., qn0 ) = 0
∀j = 1, ..., n .
Se tutte le forze attive sono conservative i punti di equilibrio risolvono le equazioni
∂V
= 0 ∀j = 1, ..., n
∂qj
o, con espressione compatta,
∇V = 0 ,
dove si intende che il gradiente è ottenuto calcolando le derivate rispetto alle
coordinate generalizzate che descrivono il sistema.
Scaricare