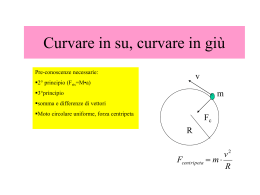
3. Biomeccanica 1 Momento di una forza O b P F Si definisce momento di una forza F rispetto ad un punto O il prodotto vettoriale M = b ∧F 2 Ricordi il prodotto vettoriale???? 3 Prodotto Vettoriale Il prodotto vettoriale è un’operazione vettoriale che associa a due vettori un altro vettore. Il risultato dell’operazione è, dunque, un VETTORE. Ne segue che dovremo conoscerne MODULO, DIREZIONE e VERSO e NON SOLO IL MODULO IL RISULTATO è un VETTORE b α a 4 Il modulo del vettore risultante è: c= a b sinα La direzione del vettore risultate è quella della perpendicolare al piano individuato dai vettori a e b. c b α a 5 M O α F b Il momento di una forza F è un vettore perpendicolare al piano individuato dalla forza e dal braccio della forza il cui verso è dato dalla regola della mano dx e di modulo pari a: M = F b sin α 6 Dimensioni [M] = [F] [L]=[L2][M][T-2] Unità di misura: [SI] newton (N) × metro (m)= m2.kg.s-2 7 Condizioni di equilibrio roto-traslatorio di un corpo 1. Equilibrio Traslazionale FRIS = ma = 0 (FRIS)x=m ax=0 (FRIS)y=m ay=0 (FRIS)z=m az=0 1 equazione vettoriale 3 equazioni scalari 2. Equilibrio Rotazionale MRIS = n ∑ i =1 Mi = bi ∧ Fi = 0 (MRIS)x=0 (MRIS)y=0 (MRIS)z=0 1 equazione vettoriale 3 equazioni scalari 8 Condizioni di equilibrio roto-traslazionale per un corpo rigido (FRIS)x=0 (FRIS)y=0 (FRIS)z=0 (MRIS)x=0 6 Equazioni scalari (MRIS)y=0 (MRIS)z=0 9 Approssimazione per gli equilibri nel corpo umano Una buona approssimazione consiste nel considerare le forze tutte giacenti in un piano verticale (x,y). In questo modo accade che: y F e b sono nel piano xy (FRIS)x=0 Fris (FRIS)y=0 (FRIS)z=0 (MRIS)x=0 o (MRIS)y=0 (MRIS)z=0 z b x Mris ⁄⁄ asse z 10 Equilibrio dell’articolazione dell’anca L’articolazione dell’anca è costituita dalla testa del femore che si inserisce nella cintura pelvica in una cavità detta acetabolo. Tra la testa del femore e l’acetabolo ci sono cartilagini che garantiscono il movimento quasi senza attrito. 11 Consideriamo un uomo in equilibrio su un piede solo Bilancio delle Forze 1) La Forza peso della gamba, Pg è diretta verticalmente verso il basso, è applicata nel baricentro della gamba e ha modulo pari a 1/7 della forza peso del corpo. 2) La Reazione vincolare, N, offerta dal suolo, diretta verticalmente verso l’alto e di modulo pari alla forza peso. 3) La Forza R cha agisce sulla testa del femore che tiene conto della forza peso del corpo (senza la gamba sottostante). 4) La Forza F di trazione dei muscoli abduttori (glutei) che agiscono sul troncatere maggiore. Questa forza ha modulo incognito ma è diretta verso l’alto formando un angolo di circa 70° con l’orizzontale. 12 Rispetto a quale punto calcoliamo i momenti delle forze? Ora devi introdurre un sistema di riferimento in cui studiare l’equilibrio dell’articolazione. Come sai il sistema di riferimento è arbitrario e lo scegli arbitrariamente per cercare di rendere più semplici i calcoli che andrai a fare y Sceglierai x sicuramente il punto O coincidente con la testa del femore. In questo modo il momento della forza R sarà nullo (il braccio della forza è nullo) 13 14 3 Riprendiamo le condizioni di equilibrio roto-traslazionale: (FRIS)x=0 (FRIS)y=0 (MRIS)z=0 E vediamo come utilizzare nel caso dell’articolazione dell’anca 15 La condizione di equilibrio roto-traslazionale si riduce alle 3 equazioni scalari (1) (FRIS)x= Pgx + Rx + Fx + Nx=0 (2) (FRIS)y= Pgy + Ry + Fy + Ny=0 (3) (MRIS)z = (MPg)z + (MN)z + (MF)z + (MR)z=0 che divengono: Fcos70°- Rx=0 (1) Fsin70°- Ry-1/7 p +p=0 (2) Fsin70°×(7cm) -p× (11 cm)+1/7p× (3cm) +0=0 Dalla (3) si ottiene: F~1.61 p Lo sforzo dei muscoli abduttori (glutei) dipende dalla massa corporea !!!! 16 (3) Momento della forza F (MF )Z = bF ∧ F = bF × F × sin α y F z bF α=(180-70)° (MF)z bF x (MF)Z= bF×F×sin(180-70)= (7cm) × F× sin(70) 17 Momento della forza Pg (MPg )Z = bPg ∧ Pg = bPg × Pg × sin α y z α bPg (MPg)z x Pg α bPg α bPg× sinα= 3 cm (MPg)Z= Pg × bPg× sinα= Pg× 3 cm 18 Momento della forza N (MPg )Z = bN ∧ N = bN × N × sin α y z bN N (MN)z α x bN bN× sin(180-α)= 11 cm (MN)Z=N× bN× sinα = N× bN× sin(180-α) = N × 11 cm= - 19 p × 11 cm Dalla (3) si ottiene: La sforzo dei muscoli abduttori (glutei) dipende dalla massa corporea !!!! F~1.61 p Sostituendo la relazione precedente nella (1) e nella (2) si ottiene: Rx~ 0.55 p Ry~ 2.37 p R = (Rx ) + (Ry ) ≈ 2.5p 2 2 La forza che agisce sulla testa del femore è pari a circa due volte e mezza la forza peso corporea!!! 20 Determinate le componenti cartesiane possiamo anche calcolare l’orientamento della forza R che agisce sulla testa del femore RX = R cos θ ⎛ RX ⎞ θ = arccos⎜ ⎟ ≈ 76.9° ⎝ R ⎠ 21 Perché è importante determinare l’angolo? 1) E’ determinante perché il tessuto osseo cresce nella direzione dello sforzo applicato. Questo comporta una deviazione della testa del femore rispetto al femore 2) In caso di una frattura del femore, la forza dei muscoli abduttori si indebolisce (F→0) con la conseguenza che R è diretta più verticalmente. La testa del femore cresce più del dovuto in verticale (R)x= Fcos70°=0 (se F→0) Con un conseguente allungamento dell’arto il quale produce una rotazione della cintura pelvica con conseguente 22 curvatura della colonna vertebrale (scoliosi) E se hai la scoliosi o quando hai/avrai l’articolazione logora a cosa ti serve/servirà un BASTONE ??? 23 Valutare la forza F degli adduttori e la forza R agente sulla testa del femore Sul bastone si scarica 1/6 della forza peso La forza peso residua (5/6 p) è applicata al baricentro corporeo La reazioni vincolari offerte dal suolo al corpo e al bastone saranno chiaramente in modulo pari a: Np=5/6 p Nb= 1/6 p 24 Qual è la distanza tra l’asse baricentrale e la forza Np? (MNp)z +(MNb)z=0 Np×d - Nb×(30 cm) =0 d = (Nb/Np)×(30 cm) =6 cm 25 Ora è sufficiente ripetere la stessa procedura seguita per il calcolo di F e R nel caso dell’articolazione dell’anca di un uomo in equilibrio su un piede solo. (FRIS)x= Pgx + Rx + Fx + Npx=0 (FRIS)y= Pgy + Ry + Fy + Npy=0 (MRIS)z = (MPg)z + (MNp)z + (MF)z + (MR)z=0 I momenti delle forze si intendono calcolati rispetto alla testa del femore 26 Fcos70°- Rx=0 Fsin70°- Ry - 1/7 p + 5/6 p=0 Fsin70°×(7cm) +1/7p× (3cm)-5/6 p× (18-7-6) cm =0 Ora è solo algebra e puoi facilmente verificare che: F~0.64 p Lo sforzo richiesto ai muscoli adduttori è notevolmente inferiore rispetto a quello necessario per stare in equilibrio su un piede solo (F~1.61 p) !!! 27 Rx~ 0.22 p Ry~ 1.29 p R = (Rx ) + (Ry ) ≈ 1.31p 2 2 ⎛ RX ⎞ θ = arccos⎜ ⎟ ≈ 80.3° ⎝ R ⎠ La forza sulla testa del femore è circa la metà di quella che si ha in equilibrio su un piede solo (deambulazione, corsa) L’angolo è circa lo stesso 28 Equilibrio del piede in sollevamento Consideriamo il caso dell’equilibrio su un singolo piede. Assumiamo che venga alzato il calcagno. L’obiettivo è quello di calcolare la forza applicata dal tendine d’Achille sul calcagno quando il peso del corpo si scarica sulla pianta del piede. Bilancio delle Forze che agiscono sul piede in sollevamento 1) La FT è la forza applicata dal tendine al calcagno. 2) La Forza F0 che viene esercitata dalle ossa della gamba (fibula e tibia) sul piede 3) La Reazione vincolare FP offerta al piede dal suolo, diretta verticalmente verso l’alto e di modulo pari alla forza peso. E la forza peso del piede? 29 10 cm Le due condizioni di equilibrio traslazionale sono: (FRIS)x= (FT )x + (F0 )x + (FP )x =0 (FRIS)y= (FT )y + (F0 )y + (FP )y =0 Che divengono: (FT ) sin7°- (F0 ) sinθ =0 (FT )cos7°- (F0 ) cosθ + FP =0 30 La condizione di equilibrio rotazionale sarà: (MRIS)z = (MFT)z + (MF0)z + (MFP)z =0 Che diviene, se scegliamo come polo per il calcolo dei momentiil punto di applicazione della forza F0: 10cm × (FP) -5.6 cm × (FT ) cos7° =0 Dalla quale, se fai bene i calcoli (periodo ipotetico del 1°tipo?), troverai: FT =1.8 FP Il tendine d’Achille è sottoposto a sforzi rilevanti dovendo sopportare una tensione pari a circa due volte la forza peso Tendiniti, ispessimenti, rottura: Se FT diventa piccola nessuna forza 31 bilancia F0 e quindi non si riesce a sollevare il piede Che, introdotta nelle prime due, ti darà (se non ti vengono i calcoli, li faremo insieme): F0 =2.8 FP θ~ 4.5° La forza che la gamba esercita sul piede ha modulo quasi tre volte la forza peso ed è diretta quasi lungo la verticale Tendiniti, ispessimenti, rottura: Se FT diventa piccola nessuna forza bilancia F0 (che è grande in modulo) e quindi non si riesce a sollevare il piede 32 Equilibrio tronco-vertebrale Consideriamo un uomo in posizione eretta (in equilibrio, questa volta, su entrambi i piedi). Qual è l’intensità della forza muscolare esercitata dai muscoli dorsali? Bilancio delle Forze che assicurano l’equilibrio del tronco 1) FP è la forza peso applicata al baricentro. Il baricentro corporeo si trova in posizione anteriore rispetto alla spina dorsale. 2) Lo sforzo compressionale R che agisce sulla settima vertebra della colonna vertebrale dovuto al fatto che il tronco poggia sulla colonna vertebrale. 3) La forza muscolare Fm offerta dai muscoli dorsali 33 La condizione di equilibrio roto-traslazionale si riduce alle 3 equazioni scalari (FRIS)x= (Fm)x + Rx + (FP)x =0 (FRIS)y= (Fm )y + Ry + (FP)y =0 (MRIS)z = (MFm)z + (MR)z + (MFp)z =0 che divengono: R = Fm + FP Fm a = bFP 34 Fm =(b/a)FP~2FP R = Fm + FP ~ 3FP 1. Quanto più il baricentro è allineato con la colonna vertebrale (b assume il minimo valore possibile) e tanto minore sarà lo sforzo richiesto ai muscoli dorsali e lo sforzo compressionale vertebrale 2. In caso di sovrappeso il baricentro è spostato in avanti (b aumenta) e quindi per soddisfare l’equilibrio rotazionale lo sforzo richiesto ai muscoli dorsali aumenta così come aumenta lo sforzo compressionale vertebrale 35 La frattura della tibia dello sciatore Il piede e l’anca di uno sciatore di massa m=70 kg sono bloccati, mentre viene meno l’appoggio dell’altro piede. Il corpo tende a ruotare attorno ad un asse passante per la tibia (vedi figura) nel piano della figura. La tibia può sopportare un massimo momento flettente pari a M=(πr3/4) × Σ dove con Σ indichiamo lo sforzo compressivo. Qual è la massima distanza di cui il baricentro può spostarsi rispetto alla tibia prima che questa si fratturi (vedi sotto)? (r=1 cm; Σ=2.1×108 Nm-2) Tipica radiografia di una frattura per flessione della tibia 36 L’equilibrio del piede in sollevamento per la persona accovacciata Nel caso di una persona accovacciata la configurazione del piede in sollevamento vista nella slide 29 di questo capitolo si modifica come in figura. Determinare FT e F0 e confrontarle in maniera critica con il caso suddetto. FT=13,54FP F0=14.17FP θ=41.2° 37 La tensione del legamento patellare Sempre nel caso di una persona accovacciata la parte inferiore della gamba è mantenuta in posizione di equilibrio dal legamento patellare attaccato alla parte superiore della tibia e che scorre sopra la rotula. Le forze agenti sulla gamba inferiore sono quelle mostrate in Figura. Si assuma FP=40 kgpeso e Pg= 10 kg peso . Determinare il modulo della tensione T cui è sottoposto il legamento. nonché direzione e modulo di R. Il punto di applicazione della tensione coincida con il punto su cui agisce R. La gamba inferiore forma un angolo di circa 45° con la direzione orizzontale. 38
Scaricare