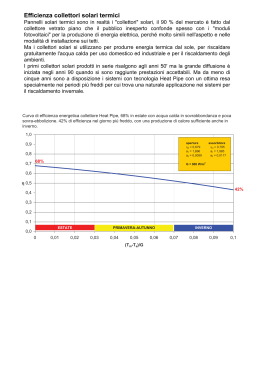
Le equazioni della meccanica dei fluidi Stefano Lanzoni Dipartimento di Ingegneria Idraulica, Marittima e Geotecnica Universitá di Padova 1 1 Introduzione In numerosi problemi riguardanti l’Ingegneria, la Fisica e le Scienze Naturali risulta conveniente studiare il comportamento di un fluido (cosı́ come, del resto, quello di un solido) utilizzando un approccio di tipo continuo. In particolare, pur essendo i fluidi (liquidi e gas) costituiti da sistemi estremamente complessi di molecole piú o meno discoste tra loro, in continuo movimento e soggette ad urti reciproci, si postula sia lecito studiare il comportamento del fluido dal punto di vista macroscopico, ovvero su una scala spaziale molto maggiore della distanza intermolecolare. Si assume a tal scopo che quantitá fisiche quali la massa, la quantitá di moto, l’energia, etc, siano funzioni continue dello spazio occupato dal fluido stesso. Le equazioni fondamentali della Meccanica dei Continui sono state ampiamente studiate nell’ambito del corso di Meccanica Razionale e sono state specificatamente applicate allo studio dei liquidi nel corso di Idraulica (cosı́ come l’applicazione al caso dei solidi é stato oggetto del corso di Scienza delle Costruzioni). Si rimanda dunque il lettore ai testi utilizzati in tali corsi per una trattazione sistematica del comportamento cinematico e dinamico dei fluidi intesi come mezzi continui. In questa sede si vuole piuttosto dare una visione d’insieme delle leggi fisiche che governano il moto dei fluidi e delle formulazioni alternative che tali leggi possono assumere, in funzione anche delle semplificazioni addottate nel problema considerato. In particolare, le equazioni fondamentali della meccanica dei fluidi vengono qui riprese con particolare enfasi alla loro intrinseca natura di leggi di conservazione. Indipendentemente dal grado di complessitá del sistema fluido che si vuole studiare, infatti, non solo proprietá fondamentali come la massa, la quantitá di moto e l’energia si conservano ad ogni istante, ma le tre leggi di conservazione che ne governano l’evoluzione nel tempo consentono di determinare senza ambiguitá il comportamento dinamico del sistema fluido. L’unica informazione addizionale richiesta riguarda il tipo di fluido considerato (fluido viscoso newtoniano, fluido viscoplastico, fluido di Bingham,..., comprimibile, incomprimibile, etc). Tale informazione é data dal cosidetto legame costitutivo che, come vedremo, lega lo stato di tensione in ciascun punto del campo fluido con la velocitá di deformazione del medesimo. La dispensa é organizzata come segue. Nel paragrafo 1 vengono brevemente richiamati alcuni concetti di natura cinematica riguardanti i metodi di indagine euleriano e lagrangiano. Il paragrafo 2 richiama un importante teorema di natura cinematica (il teorema del trasporto o di Reynolds) che consente di valutare la derivata totale (materiale) dell’integrale di una de- 2 terminata grandezza (scalare o vettoriale) esteso ad un generico volume materiale di fluido. Tale teorema viene utilizzato nella sezione 3 per ricavare le equazioni di conservazione della massa, della quantitá di moto e dell’energia in forma integrale. La formulazione differenziale di tali equazioni é derivata nel paragrafo 4 dove vengono inoltre brevemente richiamati i concetti di stato di tensione in un punto e di legame costitutivo. Un esempio della applicazione delle equazioni dei continui fluidi ad un problema particolare quale quello delle correnti a pelo libero é riportato nel paragrafo 5 dove sono derivate le equazioni di de Saint Venant. Nel paragrafo 6 vengono poi brevemente discusse altre equazioni di conservazione - della salinitá, dei sedimenti, della concentrazione di un soluto passivo - che spesso si incontrano nelle applicazioni pratiche. Infine, in Appendice si introducono le notazioni utilizzate nella dispensa, si riportano alcuni brevi cenni di calcolo vettoriale e tensoriale utili per la derivazione delle varie equazioni nonché alcune specifiche dimostrazioni per il lettore interessato ad ulteriori approfondimenti. 3 2 Metodi di indagine Euleriano e Lagrangiano E’ noto dalla Meccanica Razionale e dall’Idraulica che le proprietá caratterizzanti un campo fluido (densitá, velocitá, quantitá di moto, etc.) possono essere studiate seguendo due metodi di indagine cinematica: quello (detto euleriano) che si fonda sulla determinazione della velocitá e delle sue variazioni in ogni punto del campo di moto e quello proprio della meccanica classica (detto metodo lagrangiano) che si basa sullo studio delle traiettorie delle singole particelle. Nella trattazione euleriana le proprietá del campo di moto vengono definite in funzione del tempo t e della posizione nello spazio x rispetto ad un sistema di riferimento cartesiano inerziale di assi x1 , x2 , x3 . Le variabili (x, t) sono dette euleriane (o spaziali) e caratterizzano una singola posizione dello spazio dove, al variare del tempo, vengono a trovarsi particelle di fluido diverse. L’approccio lagrangiano, d’altra parte, si fonda sul concetto di elemento materiale, ovvero di un volume che si muove con il fluido e, quindi, é sempre costituito dalle stesse particelle liquide. Le proprietá del campo di moto possono allora essere definite in funzione del comportamento dinamico del volume materiale elementare (particella fluida) considerato, individuato tramite la posizione X del suo centro di massa ad un fissato istante iniziale t0 (cfr. figura I1 ). Con il trascorrere del tempo tale volume materiale elementare si sposterá e si deformerá, la sua posizione al generico istante t (computato a partire dall’origine dei tempi t0 ) essendo definita dalla relazione x = x(X, t) (1) che definisce la traiettoria percorsa dalla particella fluida inizialmente posta in X. Si noti come, per un fissato istante t la (1) individua una trasformazione della regione V0 occupata dal fluido all’istante iniziale t0 nella regione V (t) occupata all’istante t. Il moto del continuo fluido puó quindi essere descritto assumendo come variabili indipendenti le coordinate (X, t), dette anche coordinate materiali in quanto ciascuna particella del campo fluido é caratterizzata da un assegnato valore di X. Ovviamente tale proprietá é verificata solo se si ammette, come faremo in seguito, che particelle distinte tra loro all’istante iniziale t0 si mantengano tali anche nel corso del moto. E’ inoltre evidente che tale modo di procedere equivale ad assumere un sistema di riferimento solidale con il fluido e, pertanto, soggetto ad alter- 4 azioni nel corso del movimento. In particolare, se nella condizione iniziale si considera un sistema di riferimento ortogonale, negli istanti successivi esso si trasforma in un generico sistema curvilineo (cfr. figura I2a ). Si consideri infatti il volume materiale dV0 che all’istante iniziale t0 é contenuto nel parallelepipedo rettangolare centrato in X di lati dX1 , dX2 , dX3 paralleli, rispettivamente, agli assi x1 , x2 , x3 . Con il trascorrere del tempo tale volume materiale, pur contenendo sempre le stesse particelle di fluido, si modificherá trasformandosi, all’istante t in un parallelepipedo obliquo di lati dX1 , dX2 , dX3 , centrato in x = x(X, t), ovvero nel punto individuato dal baricentro del volume materiale. Come riportato in Appendice, é possibile dimostrare che il volume dV (t) di tale parallelepipedo obliquo risulta legato al volume iniziale dV0 = dX1 dX2 dX3 dalla relazione dV = dV0 ∂x1 ∂X1 ∂x2 ∂X1 ∂x3 ∂X1 ∂x1 ∂X2 ∂x2 ∂X2 ∂x3 ∂X2 ∂x1 ∂X3 ∂x2 ∂X3 ∂x3 ∂X3 (2) dove il termine a secondo membro rappresenta il determinante Jacobiano J della trasformazione che consente di passare dalle coordinate cartesiane (euleriane) x1 , x2 , x3 alle coordinate curvilinee lagrangiane X1 , X2 , X3 . La variazione nel tempo di una qualsiasi quantitá materiale, cioé associata al moto delle particelle, é espressa dalla cosiddetta derivata materiale o totale. Fissata una generica particella, ovvero fissata la sua posizione X all’istante iniziale t0 , un osservatore che si muove solidale con la particella vedrá una qualsiasi proprietá ψ ad essa associata variare non solo perché varia il tempo, ma poiché varia anche la posizione x(X, t) descritta dalla traiettoria della particella. Dunque dψ dt = ∂ψ + u · ∇ψ ∂t (3) essendo u = (dx1 /dt, dx2 /dt, dx3 /dt) il vettore della velocitá euleriana e avendo indicato con ∇ l’operatore gradiente (cfr. Appendice). Nel caso del determinante Jacobiano si puó dimostrare che dJ = J∇ · u dt dove ∇· rappresenta l’operatore della divergenza. (4) 5 3 Il teorema del trasporto (o di Reynolds) Il teorema del trasporto (o di Reynolds) é un importante teorema di tipo cinematico che, come vedremo nel seguito, consente di passare da un approccio di tipo continuo ad un approccio basato sul cosidetto volume di controllo. Fissato un dato istante t, si isoli all’interno della massa fluida un generico volume materiale V . Indicata con ψ una qualsiasi proprietá intensiva del fluido (ovvero una proprietá per unitá di volume) si vuole studiare la vari azione subita nel tempo dalla generica proprietá estensiva Ψ = ψdV . Si noti come, in generale, ψ puó rappresentare una quantitá sia scalare (la massa ρ, l’energia specifica per unitá di volume e, etc) sia vettoriale (la quantitá di moto per unitá di volume ρu, il momento della quantitá di moto per unitá di volume r × u, essendo r il braccio rispetto ad un asseganto polo, etc). In base alle (2),(4) e osservando che V0 non dipende dal tempo, si avrá d dt ψdV V dV )dV0 dV0 V0 dJ dψ +ψ = J dV0 dt dt V0 dψ + ψ∇ · u JdV0 = dt V0 = d dt ψ( da cui, utilizzando nuovamente la (2), d dt ψdV = V V dψ + ψ∇ · u dV dt (5) Il significato cinematico di tale teorema emerge immediatamente qualora se ne fornisca una formulazione alternativa. In base alla (3), infatti, la funzione integranda che compare a secondo membro della (5) puó essere riscritta come dψ + ψ∇ · u = dt ∂ψ + u · ∇ψ + ψ∇ · u ∂t (6) Ma, utilizzando la convenzione (cfr. Appendice) per cui termini contenenti indici ripetuti vanno sommati tra loro, si puó scrivere u · ∇ψ + ψ∇ · u = uj ∂(ψi uj ) ∂ψi ∂uj + ψi = = ∇ · (u ⊗ ψ) ∂xj ∂xj ∂xj (7) 6 dove ⊗ indica il prodotto tensoriale di due vettori che si riduce all’usuale prodotto ψu qualora ψ sia una quantitá scalare. D’altra parte, indicata con S la superficie che ad un dato istante t delimita il volume V , in base al teorema della divergenza (noto anche come teorema di Gauss o del flusso) si avrá V ∇ · (u ⊗ ψ)dV = S ψ(u · n)dS (8) con n normale alla superficie S, positiva se orientata verso l’esterno. Ne consegue che la (5) puó essere riscritta nella forma d dt ψdV = V V ∂ψ dV + ∂t S ψu · ndS (9) Pertanto, la derivata totale (materiale) dell’integrale di ψ esteso al volume mobile V uguaglia la somma dell’integrale della derivata locale della quantitá ψ esteso al volume fisso (detto volume di controllo) istantaneamente coincidente con V e del flusso di ψ attraverso la superficie di contorno di tale volume fisso. Un aspetto essenziale della (9) risiede nel fatto che le variazioni di ψ all’interno di V , in assenza di un termine sorgente, dipendono solo dai flussi che attraversano la superficie S e non dai flussi che si generano all’interno di V . Tale proprietá é di notevole importanza nella derivazione di approssimazioni numeriche delle leggi che governano un assegnato campo di moto. E’ infine importante osservare come il volume di controllo é fisso rispetto al sistema di riferimento x1 , x2 , x3 che, tuttavia, essendo inerziale, puó muoversi seguendo una legge di moto rettilineo uniforme. Nel caso in cui, invece, il sistema di riferimento x1 , x2 , x3 non sia inerziale, é necessario modificare la (9) mettendo in conto l’accelerazione aO con cui si muove l’origine O del sistema di riferimento e velocitá angolare ω con cui esso ruota (Grioli, 19xx; Shames, 1992, p. 174). Nei paragrafi che seguono vedremo come il teorema del trasporto consente di derivare in forma integrale e differenziale le equazioni di conservazione della massa, della quantitá di moto e dell’energia. 7 4 4.1 Principio di conservazione della massa Formulazione Integrale Si isoli all’interno del campo fluido un arbitrario volume materiale V(t). La massa M del fluido che all’istante t occupa tale volume é pari a M = V ρdV , avendo indicato con ρ la densitá del fluido (ovvero la massa per unitá di volume). Il principio di conservazione della massa postula che la massa di fluido M non cambi con il moto di V , ovvero che la derivata materiale di M sia sempre identicamente uguale a zero dM =0 (10) dt Utilizzando il teorema del trasporto, ponendo cioé ψ = ρ nella (5), la (10) puó essere riscritta come V dρ + ρ∇ · u dV dt = 0 (11) D’altra parte utilizzando la formulazione alternativa (9) del teorema del trasporto si ottiene V ∂ρ dV = − ∂t S ρu · ndS (12) Tale espressione mostra come, fissato un volume di controllo V delimitato dalla superficie S, la differenza tra il flusso di massa entrante in S e il flusso di massa uscente da S uguaglia, in assenza di termini sorgenti, la variazione nel tempo della massa contenuta in V . In particolare, per una corrente monodimensionale, ovvero caratterizzata dallo sviluppo del moto in una direzione prevalente, si potrá scrivere che V ∂ρ dV = ∂t Sout ρu · ndS − Sin ρu · ndS (13) dove Sout ed Sin indicano le porzioni di S in cui la normale n (diretta esternamente a V ) é orientata concordemente o discordemente con il vettore velocitá u. Si noti come ρu · ndS rappresenti la portata di massa che attraversa la superficie dS mentre dQ = u · ndS é la relativa portata volumetrica. 8 4.2 Formulazione differenziale La forma differenziale euleriana dell’equazione di continuitá puó essere facilmente dedotta considerando il bilancio di massa relativo ad un prisma elementare di lati dx1 , dx2 , dx3 (cfr. Ghetti, 1981, p. 72). Tuttavia, essa discende immediatamente dalla (11) qualora si osservi che, in virtú dell’arbitrarietá del volume V considerato, l’integrale a secondo membro é identicamente nullo solo se lo é la funzione integranda, ovvero dρ + ρ∇ · u = 0 (14) dt Sfruttando le (3),(6), (7), si ottiene poi la classica forma differenziale dell’equazione di continuitá ∂ρ + ∇ · (ρu) = 0 (15) ∂t che in forma estesa si scrive: ∂ρ ∂(ρux ) ∂(ρuy ) ∂(ρuz ) + + + =0 ∂t ∂x ∂y ∂z Le equazioni (14), (15) sono del tutto equivalenti da un punto di vista matematico, ma, come vedremo, non lo sono qualora si operi una discretizzazione numerica delle equazioni. In particolare, la forma (15), viene detta forma conservativa (o divergente) dell’equazione di continuitá. Infine, si lascia al lettore dimostrare che dalla (5) associata alla (14) discende la relazione, ampiamente utilizzata nei paragrafi che seguono, d dt 4.3 ρψdV = V ρ V dψ dV dt (16) Condizione cinematica in corrispondenza di un’interfaccia L’equazione di continuitá assume una forma particolare in corrispondenza della frontiera del dominio fluido (in corrispondenza cioé di una superficie libera o di una parete). E’ possibile dimostrare, infatti, che ogni frontiera (fissa o mobile) é una superficie materiale (e, quindi, costituita sempre dalle stesse particelle fluide) e soddisfa la cosidetta condizione cinematica. Sia dunque F(x, t) = 0 l’equazione all’istante t della frontiera del fluido in moto. All’istante t + dt l’equazione della frontiera diventa F(x + dx, t + dt) = 0. Sviluppando la F in serie di Taylor si ottiene 9 F(x + dx, t + dt) = F(x, t) + ∂F dt + ∇F · dx + O(dt2 , |dx|2 ) = 0 ∂t Da cui, a meno di infinitesimi di ordine superiore uF = − 1 ∂F ∇F ∂t dove uF = dx/dt rappresenta la velocitá uF con cui si muove la frontiera. Il fatto che la superficie F sia una frontiera del campo fluido impone che non vi sia distacco o compenetrazione, ovvero che le componenti in direzione normale a F della velocitá del fluido u e della velocitá della frontiera uF coincidano. Ricordato che la normale alla frontiera é data da nF = ∇F |∇F| (17) dovrá quindi essere soddisfatta l’uguaglianza uF · nF = u · nF per cui − 1 ∂F ∇F =u· |∇F| ∂t |∇F| da cui discende immediatamente la condizione cinematica ∂F + u · ∇F = 0 ∂t (18) ovvero, in forma estesa: ∂F ∂F ∂F ∂F + ux + uy + uz =0 ∂t ∂x ∂y ∂z Si lascia al lettore dimostare che tale condizione implica che la superficie F(x, t) = 0 é sempre costituita dalle stesse particelle, ovvero é una superficie materiale. Si noti infine come nel caso in cui la frontiera sia costituita da una superficie fissa la (18) si riduce ad imporre l’usuale condizione di continuitá u · nF = 0 (19) 10 5 Principio di conservazione della quantitá di moto 5.1 Formulazione integrale Si consideri la porzione di fluido che all’istante t occupa il volume materiale V avente superficie S. Le forze esterne agenti su tale volume possono, in generale, essere suddivise in • forze di massa f (x, t), definite per unitá di massa e applicate alle particelle fluide contenute in V • forze di superficie F(x, t), definite per unitá di superficie e applicate alle particelle fluide che costituiscono S. Indichicato con u(x, t) il vettore della velocitá (euleriana) in un generico punto, il principio di conservazione della quantitá di moto postula che la derivata totale della quantitá di moto associata al volume materiale V sia uguale in ogni istante alla risultante delle forze esterne ad esso applicate, ovvero d dt ρudV = ρf dV + V FdS V (20) S Aplicando il teorema del trasporto al primo membro della (20), ponendo cioé ψ = ρu nella (5) e tenendo conto della equazione di continuitá (11) si ottiene la seguente formulazione integrale del principio di conservazione della quantitá di moto ρ V du dV = dt ρf dV + FdS V (21) S D’altra parte, utilizzando il teorema del trasporto nella formulazione alternativa (9) si ottiene V ∂(ρu) dV + ∂t S (ρu)u · ndS = ρf dV + V FdS (22) S Per una corrente monodimensionale, indicata con dQ = u · ndS la portata volumetrica che attraversa la superficie dS e, al solito, assumendo la convenzione per cui la normale n alla superficie S é orientata esternamente a V , si ottiene 11 V ∂(ρu) dV + ∂t Sout ρudQ − ρudQ = Sin ρf dV + V FdS (23) S dove i pedici out e in si riferiscono a quelle porzioni di S in cui il flusso di quantitá di moto é diretto, rispettivamente, verso l’esterno e verso l’interno del volume di controllo. 5.2 5.2.1 Formulazione differenziale Stato di tensione in un continuo La derivazione della forma differenziale del principio della quantitá di moto presuppone l’introduzione del concetto di tensione in un generico punto di un continuo. Con riferimento alle notazioni di figura I4 si condideri un qualsiasi sistema continuo in moto che all’istante t occupa il volume V (t) delimitato dalla superficie chiusa S(t). All’interno di V si isoli un arbitrario volume materiale V ∗ delimitato dalla superficie S ∗ . Su tale superficie si consideri una superficie elementare δS ∗ , centrata in P (x), la cui giacitura é individuata dalla normale n orientata esternamente a V ∗ . Indicata con δR la risultante delle forze che il fluido esterno a V ∗ esercita su δS ∗ la tensione t agente nel punto P (x) é definita come δR (24) δS∗ La tensione t, dunque, rappresenta una forza per unitá di superficie e risulta funzione sia del punto P (x) considerato sia della giacitura (individuata mediante la normale n) dell’elemento considerato. La giacitura della superficie elementare δS ∗ , infatti puó essere qualsiasi in virtú del modo del tutto arbitrario con cui si isola il volume V ∗ e, quindi, la sua superficie S ∗ . Se ora, sempre con riferimento al volume arbitrario V ∗ , si considera il principio della quantitá di moto nella formulazione (21), al tendere a zero di V ∗ gli integrali di volume risultano infinitesimi di ordine superiore rispetto all’integrale di superficie e, quindi, il principio della quantitá di moto a livello locale si riduce ad una condizione di equilibrio delle forze di superficie (tensioni) distribuite su una superficie chiusa circostante il punto P considerato, ovvero t = t(x, n) = lim ∗ δS →0 lim V ∗ →0 S ∗ ∗ FdS = lim ∗ V →0 S ∗ tdS ∗ = 0 (25) 12 5.2.2 Condizione dinamica in corrispondenza di un’interfaccia Nel caso in cui il punto P si trovi sulla frontiera del campo fluido (ovvero, in un intorno di P , S ∗ coincida con l’interfaccia che separa il mezzo fluido da un altro mezzo) é necessario mettere in conto l’azione della cosiddetta tensione superficiale σ. Essa rappresenta una forza per unitá di lunghezza che agisce tangenzialmente a qualsiasi interfaccia, dando luogo ad una tensione normale all’interfaccia tσ secondo la legge di Laplace (cfr. Ghetti pag. xxx) tσ = σ( 1 1 + )n R1 R2 (26) dove, come illustrato in figura xxx, R1 ed R2 rappresentano i raggi di curvatura dell’interfaccia ed n é la normale all’interfaccia in P . La condizione dinamica in corrispondenza di una qualsiasi interfaccia che separa il sistema continuo considerato e l’esterno, puó essere dunque formulata come F = t + σ( 1 1 + )n R1 R2 (27) ovvero in ciascun elemento superficiale dell’interfaccia la somma della tensione t e della tensione normale alla superficie tσ indotta dalla tensione superficiale σ deve uguagliare la forza esterna per unitá di superficie F. 5.2.3 Il tensore delle tensioni Al fine di indagare la struttura di t si consideri il volume materiale δV di forma tetraedrica illustrato in figura I5 , avente tre facce parallele ai piani coordinati di riferimento (di normali n1 = −i1 , n2 = −i2 , n3 = −i3 ) e la quarta secondo una giacitura generica individuata dalla normale n. Indicate con tn la tensione agente sulla faccia inclinata, di area δA, e con t1 , t2 , t3 le tensioni che agiscono sulle facce parallele ai piani coordinati, aventi aree δA1 , δA2 , δA3 , la (25) impone che tδA + t1 δA1 + t2 δA2 + t3 δA3 = 0 (28) δAi = ni · nδA = −ii · nδA = −ni δA (29) t = n 1 t1 + n 2 t2 + n 3 t3 = n j tj (30) Ma, da cui: 13 Ma, la tensione tj agente sulla faccia di normale −ij puó essere cosı́ decomposta rispetto al sistema di assi x1 , x2 , x3 tj = T1j i1 + T2j i2 + T3j i3 (31) Pertanto, t = n1 (T11 i1 + T21 i2 + T31 i3 ) + n2 (T12 i1 + T22 i2 + T32 i3 ) + n3 (T13 i1 + T23 i2 + T33 i3 ) ovvero, in forma tensoriale, ti = nj Tij i.e. t=n·T (32-a) Utilizzando notazioni estese avremo: ⎡ ⎤ Txx Tyx Tzx ⎢ ⎥ [tx , ty , tz ] = [nx , ny , nz ] ⎣ Txy Tyy Tzy ⎦ Txz Tyz Tzz (33) In altre parole, la tensione nel punto P (x) secondo la giacitura individuata dalla normale n é il trasformato del vettore n tramite il tensore della tensione T. Si noti come l’equilibrio alla rotazione di un elemento infinitesimo di fluido costituito da un parallelepipedo elementare di lati dx1 , dx2 , dx3 consenta di dimostrare la cosiddetta reciprocitá delle tensioni tangenziali, per cui Tij = Tji 5.2.4 (34) Le equazioni del moto di Cauchy Risulta ora possibile ricavare l’equazione differenziale che governa il bilancio di quantitá di moto in un mezzo continuo quale quello fluido. Sempre con riferimento all’arbitrario volume V ∗ delimitato dalla superficie chiusa S ∗ , l’integrale di superficie che compare a secondo membro della (22) puó infatti essere riscritto come S∗ FdS ∗ = S∗ tdS ∗ = S∗ n · TdS ∗ = S∗ nj Tji dS ∗ (35) 14 Utilizzando il teorema della divergenza S∗ nj Tji dS ∗ = V∗ ∂Tji ∗ dV = ∂xj V∗ ∇ · TdV ∗ e sostituendo nella (22) si ottiene: V∗ ρ f− du dt + ∇ · T dV ∗ = 0 Data l’arbitraietá del volume V ∗ considerato, l’integrale é identicamente nullo solo se lo é la funzione integranda per cui l’equazione della quantitá di moto in forma differenziale porge ρ f− du dt +∇·T=0 (36) ovvero, in forma estesa, dux ∂Txx ∂Tyx ∂Tzx + + + ρ fx − dt ∂x ∂y ∂z ∂Tyy ∂Tzy duy ∂Txy + + + ρ fy − dt ∂x ∂y ∂z ∂Tyz ∂Tzz duz ∂Txz ρ fz − + + + dt ∂x ∂y ∂z = 0 = 0 = 0 Tali equazioni prendono il nome di equazioni del moto di Cauchy e valgono per qualsiasi mezzo continuo. 5.2.5 Il legame costitutivo L’equazione della quantitá di moto (??)risulta valida per qualsiasi sistema continuo. L’introduzione del cosidetto legame costitutivo permette di particolarizzarla al sistema continuo che si vuole studiare. 5.2.6 Fluido viscoso newtoniano Nel caso di un fluido viscoso newtoniano, é possibile dimostrare (cfr. Ghetti, pp. 190-193) che lo stato di tensione in un punto é legato alla velocitá di deformazione del fluido dalla seguente relazione 1 ∂ui ∂uj + ) Tij = (−p + λ∇ · u)δij + 2µ ( 2 ∂xj ∂xi (37) 15 dove δij é l’operatore di Kronecker, µ e λ sono, rispettivamente, la viscositá dinamica e la viscositá volumetrica del fluido, p é la pressione (ovvero la componente della tensione diretta normalmente alla superficie e positiva se di compressione) e il tensore 1 ∂ui ∂uj + ) (38) Dij = ( 2 ∂xj ∂xi rappresenta la velocitá di deformazione del fluido. Si noti che, in generale, µ e λ dipendono dalla pressione e dalla temperatura: si rimanda il lettore ai trattati di reologia per gli specifici approfondimenti. Qui ci si limita a ricordare la relazione proposta da Stokes secondo cui 3λ + 2µ = 0 (39) Si noti come, per un fluido in quiete, Tij = −pδij , (40) ovvero lo stato delle tensioni é isotropo, non dipende cioé dalla giacitura n ed é unicamente dato dall’azione della pressione che, come é noto dallo studio dei fluidi in quiete, é distribuita idrostaticamente all’interno del campo fluido. Nel caso di un fluido viscoso in movimento, invece, la pressione dinamica un diverso significato fisico in relazione al carattere comprimibile o incomprimibile del fluido esaminato. Per un fluido comprimibile la pressione é una variabile di natura termodinamica espressa mediante una legge di stato che dipende dal tipo di trasformazione considerata (cfr. Ghetti, p. 11). Per un fluido incomprimibile, invece, la pressione non é definibile come una variabile di natura termodinamica e qualsiasi espressione di p é possibile purché essa si riduca alla (40) al tendere a zero della velocitá di deformazione D. In particolare, risulta conveniente porre p= 5.2.7 T11 + T22 + T33 3 (41) Le equazioni di Navier Stokes Sostituendo nelle equazioni del moto di Cauchy (??) il tensore delle tensioni proprio di un fluido viscoso newtoniano (37) si ottengono le classiche equazioni di Navier-Stokes du ρ f− dt = ∇p − λ∇(∇ · u) − 2µ∇ · D (42) 16 Ma ∇·D = = 1 ∂ 2 ∂xi 1 2 ∂ui ∂uj + ∂xj ∂xi ∂ ∂ui ∂ 2 uj + ∂xj ∂xi ∂x2i 1 = 2 = ∂ 2 ui ∂ 2 uj + ∂xj ∂xi ∂x2i 1 ∇(∇ · u) + ∇2 u 2 e, quindi, ∂u − u∇u = ∇p − (λ + µ)∇(∇ · u) − µ∇2 u ∂t ovvero, in notazione tensoriale, ρ f− ∂ui ∂ui − uj ρ fi − ∂t ∂xj = (43) ∂p ∂ ∂uj ∂ 2 ui − (λ + µ) ( )−µ 2 ∂xi ∂xi ∂xj ∂xj (44) Si noti infine come, nel caso in cui il campo delle forze esterne di massa si riduca alle sole forze gravitazionali (i.e., fi = g∂h/∂xi ) e il fluido possa essere schematizzato come incomprimibile (i.e., ∂uj /∂xj = 0) le equazioni di Navier Stokes assumono la classica forma ampiamente utilizzata nello studio dei fenomeni idraulici ∂ui ∂ui ∂(p + ρgh) + uj = −ρ ∂xi ∂t ∂xj +µ ∂ 2 ui ∂x2j (45) ovvero, in forma estesa: ∂ux ∂ux ∂ux ∂ux ∂(p + ρgh) = − ρ + ux + uy + uz ∂x ∂t ∂x ∂y ∂z ∂ 2 ux ∂ 2 ux ∂ 2 ux + µ + + ∂x2 ∂y 2 ∂y 2 ∂(p + ρgh) ∂uy ∂uy ∂uy ∂uy = − ρ + ux + uy + uz ∂y ∂t ∂x ∂y ∂z ∂ 2 uy ∂ 2 uy ∂ 2 uy + µ + + ∂x2 ∂y 2 ∂y 2 ∂ 2 uz ∂ 2 uz ∂ 2 uz + µ + + ∂x2 ∂y 2 ∂y 2 ∂(p + ρgh) ∂uz ∂uz ∂uz ∂uz = − ρ + ux + uy + uz ∂z ∂t ∂x ∂y ∂z 17 6 Conservazione dell’ energia 6.1 6.1.1 Formulazione integrale Conservazione dell’energia totale: il primo principio della termodinamica La conservazione dell’energia é retta dal primo principio della termodinamica. Si tratta di una legge di natura empirica riguardante gli scambi energetici di un sistema continuo quale quello fluido qui esaminato. Si consideri dunque l’energia totale Et relativa ad un volume materiale V . Essa comprende • l’energia interna Ei , di natura molecolare e atomica, caratterizzante il fluido contenuto nel volume materiale. Indicata con ei l’energia interna per unitá di massa sará Ei = V ρei dV ; • l’energia cinetica Ec associata al moto del volume materiale. Indicata con ec energia cinetica per unitá di massa si avrá Ec = V ρec dV . Inoltre ec = u2 /2, essendo u2 = u21 + u22 + u23 il quadrato del modulo del vettore velocitá. In assenza di fenomeni di natura elettromagnetica e chimica, l’energia totale puó variare i) per effetto del lavoro eseguito dalle forze esterne agenti su V per effetto degli spostamenti subiti dal sistema e ii) a causa degli scambi di calore, intendendo per calore quella quantitá fisica che viene trasmessa in virtú di differenze di temperatura. In particolare, indicato con δL il lavoro eseguito dalle forze esterne sul volume materiale V e con δQc il calore che viene ceduto a V dall’ambiente fluido ad esso esterno, il primo principio della termodinamica puó essere scritto come dEt = δQc + δL (46) L’uso del simbolo δ é motivato dal fatto che, in generale, sia il lavoro sia il calore non sono dei differenziali esatti, ovvero non dipendono unicamente dagli stati iniziale e finale del sistema ma anche dagli stati intermedi, cioé dal tipo di trasformazione considerata. Si noti come in un sistema completamente isolato (in cui, cioé, δQc = δL = 0), l’energia totale rimane costante. Per quanto riguarda i segni si segue la convenzione per cui il lavoro compiuto sul sistema dalle forze esterne é positivo quando lo spostamento del punto di applicazione della forza ha lo stesso verso della forza. Viceversa, se lo spostamento ha verso opposto a quello della forza, viene compiuto lavoro dal sistema e questo lavoro é da considerare negativo. Analogamente, 18 si adotta la convenzione che il calore sia positivo se trasmesso al sistema e negativo se trasmesso dal sistema. Analizziamo ora il primo principio della termodinamica applicato ad un continuo fluido. Con riferimento allo spostamento subito da una particella fluida nell’unitá di tempo, u · 1, il lavoro delle forze esterne é dato dalla somma del lavoro delle forze di superficie, FdS · u e del lavoro delle forze di massa, ρf dV · u. Pertanto, δL = V ρf · udV + S F · udS (47) Per quanto riguarda gli scambi di calore tra il sistema fluido e l’esterno, indicato con −qc · ndS il flusso di calore specifico, ovvero il flusso di calore per unitá di massa del fluido che attraversa la superficie dS nell’unitá di tempo, possiamo scrivere che δQc = − S qc · ndS (48) Il segno − é legato al fatto che n e’ positiva se orientata esternamente a dS, ovvero nella direzione opposta a quella assunta come positiva per lo scambio termico. In base al primo principio della termodinamica (46), la variazione dell’energia totale nell’unitá di tempo risulta quindi dEt = dt V ρf · udV + S F · udS − S qc · ndS (49) D’altra parte, indicata con et = et (x, t) l’energia totale per unitá di massa ed utilizzando il teorema del trasporto nella formulazione (9), il primo membro della (49) puó essere riscritto come dEt d = dt dt V ρet dV = V ∂(ρet ) dV + ∂t S ρet u · ndS In definitiva, quindi V ∂(ρet ) dV + ∂t S ρet u · ndS = V ρf · udV + S F · udS − S qc · ndS (50) Tale equazione esprime il fatto che la somma della variazione dell’energia immagazzinata in V e del flusso di energia che attraversa il contorno S uguaglia la variazione netta di energia trasferito all’interno del volume di controllo V per effetto del flusso di calore e del lavoro delle forze esterne. 19 Nel caso in cui il campo delle forze esterne sia unicamente rappresentato dal campo gravitazionale, l’integrale relativo al lavoro delle forze di massa V ρf · u puó essere rielaborato come segue. Indicata con h la quota geodetica di una generica particella di fluido rispetto ad un assegnato piano di riferimento e con g la costante gravitazionale, la forza di massa sará f = −g∇h (cfr. Ghetti, pag. 189). Moltiplicando per gh l’equazione di continuitá (11),tenendo conto che h non dipende tempo, utilizzando la ( 7) e il teorema della divergenza segue che V gρu · ∇hdV dρ = g h + hρ∇ · u + ρu · ∇h dV dt V ∂ρh + hρ∇ · u + hu · ∇ρ + ρu · ∇h dV g = ∂t V ∂ρh + ∇ · (ρhu) dV g = ∂t V ∂(ρep ) dV + (ρep u · n)dS = ∂t V S avendo indicato con ep = gh l’energia potenziale che, per unitá di massa. D’altra parte, come si é detto sopra, l’energia totale et per unitá di massa immagazzinata in V puó essere suddivisa in energia interna per unitá di massa ei ed energia cinetica per unitá di massa, ec . In presenza di un campo di forze di massa costituito unicamente dal campo gravitazionale la prima legge della termodinamica puó quindi scriversi in forma integrale come V ∂ u2 ρ + gh + ei dV ∂t 2 + u2 + gh + ei u · ndS ρ 2 S = S F · udS − S qc · ndS (51) E’ ovvio che, se oltre alla forza gravitazionale sono presenti ulteriori campi esterni di forze di massa, a secondo membro comparirá un ulteriore contrib uto del tipo V ρf · u. Si noti infine come l’energia interna del fluido puó variare anche in assenza di scambi di calore (ovvero in assenza di gradienti di temperatura). Come si vedrá nel paragrafo che segue, ció é una diretta conseguenza della potenza spesa dal volume materiale nel variare la sua forma. 20 6.1.2 Conservazione dell’energia cinetica: il teorema della potenza Il teorema della poetenza é una diretta conseguenza del principio della quantitá di moto scritto in forma differenziale. Moltiplicando entrambe i membri della (??) per lo spostamento u · 1 che si realizza nell’unitá di tempo in un generico punto del continuo fluido in movimento si ottiene du +u·∇·T=0 (52) dt Analizziamo il significato dei vari termini che compaiono in tale equazione. Il termine ρu · f rappresenta la potenza (ovvero il lavoro eseguito nell’unitá di tempo) delle forze di massa per unitá di volume. Il secondo termine a primo membro rappresenta l’energia cinetica per unitá di volume. Esso, infatti, puó essere riscritto come ρu · f − ρu · 1 d(uj uj ) 1 du2 duj du = uj = = dt dt 2 dt 2 dt ρu · dove u2 = (u21 + u22 + u23 ) é il quadrato del modulo del vettore velocitá. Il terzo termine a primo membro, infine, puó essere cosı́ rielaborato u · ∇ · T = uk ∂Tjk ∂ ∂ ∂uk = (uk Tjk ) − Tjk = (uk Tjk ) − Djk Tjk ∂xj ∂xj ∂xj ∂xj avendo tenuto conto del fatto che, per la simmetria del tensore delle tensioni, 1 ∂uk ∂uk ∂uj Tjk = Tjk + Tkj ∂xj 2 ∂xj ∂xk 1 = 2 ∂uj ∂uk + ∂xj ∂xk Tjk = Djk Tjk La (52), integrata su un arbitrario volume materiale di fluido V , pertanto porge V 1 d 2 ρ u dV = 2 dt V ρf · udV + ∇ · (uT)dV − V D : TdV (53) V dove D : T = Djk Tjk (cfr. Appendice). Ma, in base alla (16), il termine a primo membro diventa V 1 du2 d ρ dV = 2 dt dt V dEc 1 2 ρu dV = 2 dt Inoltre, utilizzando il teorema della divergenza, il secondo integrale che compare a secondo membro puó essere riscritto come 21 V ∇ · (uT)dV = S u(T · n)dS = S u · tdS essendo, in generale, t = F − tσ (cfr. eq. (27)). In conclusione, l’equazione che governa l’evoluzione nel tempo dell’energia cinetica contenuta in un arbitrario volume materiale V risulta dEc = dt V ρf · udV + S F · udS − S tσ · udS − D : TdV (54) V cioé la derivata materiale dell’energia cinetica associata ad un generico volume materiale uguaglia la somma della potenza associata al lavoro delle forze esterne di massa e di superficie, alla potenza del lavoro delle forze eventualmente indotte dalla tensione superficiale, piú un termine legato all’interazione tra tensioni e velocitá di deformazione. Tale termine puó essere interpretato fisicamente come la potenza spesa perché abbiano luogo le deformazioni di volume e di forma degli elementi fluidi. 6.1.3 Conservazione dell’energia interna La legge con cui varia l’energia interna degli elementi fluidi contenuti nel volume materiale V deriva immediatamente dal confronto della (54) con la (49). Ricordando che Et = Ec + Ei segue infatti che dEi = dt V D : TdV − S qc · ndS + S tσ · udS (55) ovvero la derivata materiale dell’energia interna associata ad un generico volume materiale uguaglia la somma della potenza spesa dal volume materiale perché avvengano variazioni di forma e di volume e del fluido, del calore scambiato dal sistema fluido con l’esterno e della potenza delle forze eventualmente indotte dalla tensione superficiale. 6.2 6.2.1 Formulazione differenziale Conservazione dell’energia interna La forma differenziale dell’equazione che esprime la conservazione dell’energia interna di una massa fluida puó essere immediatamente ricavata consideranto la (55) applicata ad un arbitrario volume materiale V ∗ , delimitato dalla superficie S ∗ , completamente contenuto all’interno del campo fluido. 22 In tal caso, non essendo presente alcuna interfaccia, l’integrale relativo alla potenza delle forze indotte dalla tensione superficiale risulta identicamente nullo. D’altra parte l’integrale superficiale relativo allo scambio di calore puó essere trasformato in un integrale di volume applicando il teorema della divergenza. Pertando, ricordando la (16) e, in virtú dell’arbitrarietá del volume V ∗ che consente di affermare che l’integrale é identicamente uguale a zero solo se lo é la funzione integranda, si ottiene dei = D : T − ∇ · qc (56) dt Tale relazione consente di accoppiare il problema termodinamico al problema meccanico rappresentato dalle equazioni differenziali di continuitá (14) e della quantitá di moto (??), fornendo cosı́ una descrizione completa dello stato di un sistema continuo. In generale, infatti, pur esistendo, come vedremo, tutta una serie di problemi fisici di interesse ingegneristico in cui é possibile disaccoppiare i due problemi, la descrizione dello stato meccanico di un sistema continuo non puó prescindere dalla conoscenza del suo stato termodinamico e viceversa. ρ 6.2.2 Conservazione dell’energia totale Ricaviamo ora l’equazione differenziale che governa l’evoluzione temporale dell’energia totale associata al moto di un elemento materiale di un fluido viscoso newtoniano. A tale scopo si consideri l’equazione (49) e, al solito, la si applichi ad un arbitrario volume V ∗ , delimitato dalla superficie S ∗ , completamente contenuto all’interno del campo fluido. In base alla (16), il termine a primo membro puó essere posto nella forma d dEt = dt dt V∗ ρet dV ∗ = V∗ ρ det ∗ dV dt Seguendo una procedura del tutto analoga a quella seguita nel ricavare le equazioni del moto di Cauchy, l’integrale delle forze di superficie che compare a secondo membro della (49) puó cosı́ essere riscritto (cfr. equazione (35)) S∗ F · udS ∗ = S∗ t · udS ∗ Infine, il flusso di calore é legato al gradiente di temperatura ∇T dalla legge di Fourier qc = −Kc ∇T essendo K il coefficiente di conduttivitá termica ed il segno − essendo legato al fatto che il calore viene trasmesso per conduzione nel senso delle temperature decrescenti (cfr. Bonacina et al., 23 p. 4). Pertanto, utilizzando ancora una volta il teorema della divergenza per trasformare il , il secondo integrale che compare a secondo membro della (49) diventa S∗ qc · ndS ∗ = − S∗ Kc ∇T · ndS ∗ Sostituendo tali espressioni nella (49) e applicando il teorema della divergenza per trasformare gli integrali di superficie in integrali di volume si ottiene V∗ det − ρ(f · u) − ∇ · (T · u) − ∇ · (Kc T ) dV ∗ = 0 ρ dt Ma, in virtú dell’arbitrarietá del volume considerato, l’integrale di volume si annulla solo se si annulla la funzione integrande, per cui det − ρ(f · u) − ∇ · (T · u) − ∇ · (Kc T ) = 0 (57) dt Nel caso in cui il campo delle forze esterne sia unicamente costituito dalle forze gravitazionali (i.e., f = g∇h) e il continuo fluido considerato sia costituito da un fluido viscoso newtoniano (i.e., Tij = (−p+λ∇·u)δij +2νD), tenendo conto che et = u2 /2 + ei , e che, non dipendendo h dal tempo ρ ∂h dh = + ∇h · u = ∇h · u dt ∂t la (57) diventa ρ d u2 ( + gh + ei ) + ∇ · (pu − λu∇ · u − 2µD · u) − ∇ · (Kc T ) = 0 (58) dt 2 Ma, ∇ · (pu) = p∇ · u + u · ∇p = ρ ∂p d p ( )− dt ρ ∂t dal momento che ∂p dp = + u · ∇p dt ∂t dρ + ρ∇ · u = 0 dt dp ∂p − dt ∂t ⇒ u · ∇p = ⇒ u · ∇p = ∇ · u = − In definitiva, la (58) assume la forma 1 dρ ρ dt 24 p d u2 ( + gh + + ei ) = dt 2 ρ + 1 ∂p + ∇ · (λu∇ · u + 2µD · u) ρ ∂t 1 ∇ · (Kc T ) ρ (59) Tale equazione mostra come, con riferimento all’unitá di massa, la variazione della somma dell’energia specifica e = u2 /2 + gh + p/ρ e dell’energia interna ei sia pari alla somma della derivata locale della pressione, della potenza dissipata per effetto del carattere viscoso del fluido e della potenza termica ceduta per conduzione. 25 7 L’equazione del calore L’equazione del calore per un fluido viscoso termoconduttore puó essere facilmente ricavata a partire dall’equazione differenziale (56) che esprime in forma differenziale la conservazione dell’energia interna: ρ dei = D : T − ∇ · qc dt Nel seguito verranno considerate solamente trasformazioni reversibili, ovvero variazioni di stato del fluido che avvengono in modo cosı̀ lento da poter assumere che il processo sia costituito da una successione di stati di equilibrio e, quindi, esso possa essere descritto indifferentemente nei due sensi. 7.1 Il termine ρ dei /dt Conviene innanzitutto legare l’energia interna per unità di massa ei ad un’altra funzione di stato, l’entropia s, la cui esistenza è una diretta conseguenza del II principio della termodinamica. Per una trasformazione reversibile e per unità di massa del fluido essa è definita come: 1 dqc (60) T essendo dqc la variazione infinitesima e reversibile di calore subita dall’unità di massa del fluido. La costante di proporzionalità 1/T è essa stessa una funzione di stato e rappresenta il reciproco della temperatura assoluta T . La relazione esistente tra energia interna ed entropia può essere facilmente ricavata utilizzando il I principio della termodinamica (cfr. eq. (46)) scritto per una trasformazione reversibile e per unità di massa del fluido: ds = det = dqc − d (61) dove et è l’energia totale e d è il lavoro delle forze esterne, entrambe riferiti all’unità di massa del fluido. Nel caso di una trasformazione reversibile, infatti, è possibile assumere che l’energia interna coincida con l’energia totale, ovvero ei = et . Inoltre, ad ogni istante la pressione all’interno di un volumetto elementare di fluido può essere ritenuta costante e, quindi, una diminuzione elementare di volume specifico −d(1/ρ) che consegue ad una compressione −p comporta un lavoro per unità di massa pari a d = −p d(1/ρ). Ne consegue che la (61) può essere riscritta nella forma 26 dei = T ds − p d(1/ρ) = T ds + p dρ ρ2 (62) e, tenendo conto dell’equazione di continuità, ds p dei =T − ∇·u dt dt ρ (63) Tale relazione, d’altra parte, può essere riscritta in termini di grandezze direttamente osservabili scegliendo opportunamente le variabili di stato fondamentali attraverso cui esprimere il differenziale totale dell’entropia. In particolare, assumendo come fondamentali p e T avremo: s = s(T, p) ⇒ ds = ∂s ∂T dt + p ∂s ∂p dp T Ma, in base alle definizioni di calore specifico a pressione costante, cp = dqc dT =T dp=0 ∂s dT , (64) p e alla relazione termodinamica di Maxwell ottenuta derivando due volte la funzioni (ei − T s), ∂s dp = T ∂(1/ρ) dT , (65) p si ottiene: T ds = cp dT + T ∂ρ )p dp ( ρ2 ∂T (66) Si fa notare che, operando in modo del tutto analogo, ma assumendo come variabili fondamentali p e 1/ρ, si ottiene T ds = cv dT − T ∂p )ρ dρ ( ρ2 ∂T dove cv è il calore specifico a volume costante. Infine, sostituendo la (66) nella (63) si ottiene: αT T dp dT dei = cp − ∇·u dt dt ρ dt (67) 27 dove 1 ∂ρ αT = − ( )p ρ ∂T rappresenta il coefficiente di dilatazione isobaro (o di espansione termica). 7.2 Il termine D : T Assumendo che per un fluido viscoso newtoniano sia valida la relazione di Stokes (39), si avrà λ = −2µ/3. Il tensore degli sforzi assume quindi la forma: δij Tij = −p δij + 2µ Dij − 3 dove = Dij δij = ∇ · u. Ne consegue che: 2 D : T = −p + 2µ Dij Dij − 3 = −p + ρΦ (68) Il secondo termine a secondo membro, ρ Φ, rappresenta il lavoro fatto dalla componente non deviatorica del tensore delle tensioni (2 µ(Dij − δij /3)) in associazione con la componente non isotropa della velocitá di deformazione ((Dij − δij /3)) per deformare l’elemento fluido. Tale contributo è non negativo per cui in ogni campo di moto caratterizzato da velocità di deformazione non nulla una quota dell’energia meccanica responsabile del moto si trasforma irreversibilmente in energia interna. La quantità Φ, pertanto, può essere riguardata come il tasso di dissipazione dell’energia meccanica per unità di massa del fluido dovuta alla viscosità; essa produce un aumento irreversibile di calore all’interno della massa fluida in movimento. Risulta inoltre naturale interpretare il termine −p /ρ come la variazione di energia di compressione che, qualora l’elemento si espanda, può essere restituita al sistema meccanico senza perdita alcuna. In realtà tale assunzione risulta valida solo in modo approssimato in quanto, in un fluido in movimento, la pressione dinamica p può differire dalla pressione di equilibrio pe che caratterizza uno stato termodinamico in equilibrio (cfr. Batchelor, p. 154). 7.3 Il termine ∇ · qc Il legame costitutivo termico per un fluido termoconduttore in cui il calore viene trasferito per effetto della conduzione molecolare è dato dalla legge di Fourier: 28 qc = −Kh ∇T (69) dove Kh è il coefficiente di conduttività termica, avente le dimensioni energia/(lunghezza x tempo x temperatura). 7.4 L’equazione del bilancio termico L’equazione del bilancio termico per un fluido viscoso termoconduttore in movimento si ricava sostituendo le (67), (68) e (69) nella (56): cp αT T dp 1 dT − = Φ + ∇ · (Kh ∇T ) dt ρ dt ρ (70) In molte situazioni di interesse pratico le variazioni spaziali di Kh sono sufficientemente modeste da poterlo ritenere costante, per cui l’equazione del calore può essere riscritta nella classica forma αT T dp Φ dT − = + κh ∇2 T dt cp ρ dt cp (71) dove κh = Kh /(ρcp ) è il coefficiente di diffusività termica avente le dimensioni lunghezza2 /tempo. 7.5 La temperatura potenziale In molte applicazioni di interesse pratico (specialmente legate allo studio di fenomeni atmosferici) risulta conveniente introdurre il concetto di temperatura potenziale. Essa é definita come la temperatura θ che una particella di fluido la cui composizione non varia, acquista nel subire una trasformazione adiabatica da una pressione generica p ad una pressione di riferimento pr (generalmente assunta pari a 1 bar). In una trasformazione adiabatica (i.e., con dqc = 0), la variazione di entropia risulta identicamente nulla. Dal primo principio della termodinamica, scritto nella forma (66), consegue che dT = αT T dp ρ cp (72) Tale equazione, integrata rispetto alla pressione consente di definire la temperatura potenziale θ. In particolare, per un gas ideale, essa consente di ottenere una relazione analitica che lega θ alla temperatura T e alla pressione p. Consideriamo il caso dell’aria, che in numerose applicazioni pratiche puó essere assimilata ad un gas ideale. In tal caso, αT = 1/T . Inoltre: 29 ρ= p , Rd Tv cp = cv − Rd Tv /T, Tv = T (1 − hu + hu /εm ) essendo Rd una costante tipica dell’aria secca, Tv la temperatura virtuale, hu l’umidità e εm il rapporto tra la massa molecolare del vapore acqueo e quella dell’acqua. Sostituendo tali relazioni nella (72) si ottiene dT dp =κ , T p κ= c p − cv cp ed integrando tra T e θ e tra p e pr , θ = T( pr κ ) p (73) L’equazione del bilancio termico può facilmente essere espressa in termini di temperatura potenziale osservando che: pr T dp θ dT κ T dp θ dT αT T dp dT dθ = ( )κ ( −κ )= ( − )= ( − )= dT p dt p dt T dt p dt T dt ρ cp dt Sostituendo nella (70) si ottiene: Φ T dθ = + κh ∇2 T θ dt cp (74) 30 8 L’equazione di stato di un fluido Il concetto di stato di un fluido deriva dal confronto tra diversi campioni di fluido in equilibrio tra loro, ovvero con proprietà meccaniche, termiche e fisiche uniformemente distribuite nel tempo e nello spazio. Se due campioni, messi a confronto l’uno con l’altro coesistono senza che vi sia uno scambio di proprietà essi sono caratterizzati dallo stesso stato. Lo stato di un sistema continuo è descritto attraverso opportuni parametri di stato, la cui scelta, dettata dall’evidenza sperimentale, è arbitraria. È pratica comune caratterizzare lo stato di un fluido in equilibrio ricorrendo a quantità facilmente misurabili quali la pressione p, la temperatura T e la composizione chimica del fluido stesso (specificata attraverso la concentrazione c dei suoi costituenti). Se due campioni hanno lo stesso stato essi devono avere la stessa pressione, altrimenti del lavoro viene eseguito da un campione sull’altro; essi devono avere la stessa temperatura, altrimenti si ha un trasferimento di calore da un campione all’altro; infine essi devono avere la stessa concentrazione di ciascun componente chimico, altrimenti si realizzano delle variazioni di concentrazione dovute ai processi di diffusione molecolare. Una qualsiasi altra quantità caratterizzante lo stato di un sistema fluido (e.g., la densità, l’energia interna, l’entropia, etc) viene espressa attraverso una relazione funzionale che la lega ai parametri di stato scelti come fondamentali (e.g., pressione, temperatura, concentrazione). In particolare la relazione funzionale che lega la densià ρ alla pressione p, alla temperatura T ed, eventualmente, alla concentrazione c di un dato costituente per unità di massa è detta equazione di stato. L’evoluzione di uno stato fluido in seguito a condizioni di non equilibrio meccanico viene descritta cinematicamente dal vettore velocità e dinamicamente dal tensore delle tensioni. Le osservazioni sperimentali suggeriscono che in un fluido in movimento si può assumere, con buona approssimazione, che valga non solo l’equazione di stato, determinata con riferimento a condizioni di equilibrio, ma anche le varie relazioni di natura termodinamica attraverso cui le varie funzioni di stato (e.g., entropia, energia interna, etc) sono espresse in funzione di p, T e c. In generale, dunque, l’equazione di stato di un fluido è del tipo: ρ = ρ(p, T, c) (75) La variazione di densità di una particella che subisce una generica trasformazione, pertanto, sarà: 31 dρ = ( ∂ρ ∂ρ ∂ρ )T, c dp + ( )p, c dT + ( )p, T dc ∂p ∂T ∂c E, introdotti il coefficiente di comprimibilità isotermo αp , il coefficiente di dilatazione isobara (o di espansione termica) αT e il coefficiente di espansione legato alla concentrazione αc , definiti come: αp = 1 ∂ρ ( )T, c , ρ ∂p 1 ∂ρ )p, c , αT = − ( ρ ∂T αc = 1 ∂ρ ( )p, T , ρ ∂c (76) si ottiene infine: dρ = ρ(αp dp − αT dT + αc dc) 8.1 (77) Il caso dell’aria L’aria è costituita da una miscela di gas le cui proporzioni sono con buona approssimazione costanti se si eccettua il vapore d’acqua. La massa di vapore per unità di massa d’aria viene detta umidità specifica ed è pari a hu = ρv /ρ essendo ρv e ρ le densità, rispettivamente, del vapore d’acqua e dell’aria umida. Una soddisfacente approssimazione dell’equazione di stato dell’aria è fornita dalla legge dei gas ideali, per i quali l’energia interna, somma delle energie delle singole molecole, è funzione della sola temperatura e non dipende dalla distanza tra le molecole, ovvero dalla densità. Nel caso di aria secca (i.e., hu = 0) avremo: pd = ρd Rd T (78) dove pd e ρd sono, rispettivamente, la pressione e la densità dell’aria secca, T è la temperatura assoluta e Rd è una costante pari Rd = R = 287.04JKg −1 K −1 md essendo R (= 8314.36JKmol−1 K −1 ) la costante universale dei gas e md (= 28.966) la massa molecolare dell’aria secca. Nel caso del vapore acqueo avremo: pv = ρv Rv T (79) dove pv e ρv sono, rispettivamente, la pressione e la densità del vapore acqueo e la costante Rv è pari a 32 R= R = 461.50JKg −1 K −1 mv essendo mv (= 18.016)la massa molecolare del vapore acqueo. Per una miscela di aria umida ρ = ρd + ρv mentre la pressione p è pari alla somma delle pressioni parziali relative ai vari costituenti, ovvero p = pd + pv = (ρd + ρv Rv ) Rd T Rd Ma, tenendo conto che ρd = ρ − ρv = ρ(1 − hu ), ρv = ρ hu , risulta ρd + ρv Rv md 1 = = Rd mv εm Rv = ρ (1 − hu + hu /εm ) Rd In definitiva, l’equazione di stato per l’aria umida assume la forma: ρ= p , Rd Tv Tv = T (1 − hu + hu /εm ) (80) dove la quantità Tv , detta temperatura virtuale rappresenta quella temperatura che, ad una data pressione, dovrebbe avere l’aria secca per avere la stessa densità dell’aria umida. Il carattere analitico di tale equazione di stato consente di determinare con facilità le relazioni esistenti tra le varie grandezze termodinamiche. Ad esempio αT = 1 , T 1 αp = , p (81) Inoltre, dal momento che in un gas perfetto, per definizione, l’energia interna è funzione della sola temperatura avremo che cv = T ( ∂s ∂ei ∂ei )ρ,c = ( )ρ,c = ( )p,c ∂T ∂T ∂T Dal primo principio della termodinamica, scritto nella forma (66), facendo uso delle (80) e (81) si ottiene la Legge di Carnot cv = cv − Rd Tv ∂T (82) 33 8.2 Il caso dell’acqua dolce L’equazione di stato per l’acqua dolce è rappresentata da una relazione funzionale del tipo ρ = ρ(p, T ) 8.3 (83) Equazione di stato dell’acqua di mare La composizione dell’acqua di mare è caratterizzata da una serie di costituenti che, indipendentemente dalla concentrazione, sono presenti in proporzioni approssimativamente costanti. Ciò consente di caratterizzare la composizione attraverso la salinità cˆs , definita come la massa di sale disciolto per unità di massa fluida. Si noti come, indicata con ∆Ms la massa di sale contenuta nel volume ∆V si possa anche definire una concentrazione di massa di sale cs = lim ∆V →0 ∆Ms ∆V per cui cs = ρĉs . L’equazione di stato per l’acqua di mare è rappresentata da una relazione funzionale del tipo ρ = ρ(p, T, ĉs ) (84) Essa é stata determinata sperimentalmente. Il suo calcolo può procedere come segue. Si calcola innanzitutto il valore della densità ρ0 relativo all’acqua pura, che dipende unicamente dalla temperatura. ρ0 = ρ00 + 5 (ρ) 00n T n , n=1 essendo ρ00 = 999.842594 e (ρ) 001 = (ρ) (ρ) 6.793952 · 10−2 , 002 = −9.095290 · 10−3 , 004 = −1.120083 · 10−6 , (ρ) 005 = (ρ) 003 = 1.001685 · 10−4 , 6.53632 · 10−9 , Noto ρ0 , si può risalire al valore della densità per l’acqua salata relativa ad una generica coppia di valori di cs e T e per una atmosfera standard (ovvero 34 p = 0). 4 ρ(cs , T, 0) = ρ0 + cs [ρ11 + (ρ) 11n T n ] + c3/2 [ρ12 + s n=1 2 (ρ) 12n T n ] + c2s ρ13 n=1 (85) dove ρ12 = −5.72466 · 10−3 , ρ11 = 0.824493, ρ13 = 4.8314 · 10−4 , e (ρ) 111 = −4.0899 · 10−3 , 114 = (ρ) 5.3875 · 10−9 , 121 = (ρ) 1.0227 · 10−4 , (ρ) 112 = 7.6438 · 10−5 , (ρ) 113 = −8.2467 · 10−7 , (ρ) 122 = −1.6546 · 10−6 , Si noti come la relazione (85) sia utilizzabile nel caso in cui gli effetti delle variazioni di pressione siano trascurabili (ovvero si abbia a che fare con modeste variazioni di profondità). Se poi si trascurano i termini di ordine superiore si ha la relazione ρ(cs , T, 0) = ρ0 [1 + cs ρ11 /ρ0 ] + H.O.T Per quanto concerne la densità relativa allo stato caratterizzato dai parametri cs , T, p essa è fornita dalla relazione p ρ(cs , T, p) = ρ(cs , T, 0) 1 − Kw (cs , T, p) −1 (86) dove Kw è il modulo secante complessivo relativo allo stato in questione. Esso può essere calcolato procedendo in modo del tutto analogo a quello seguito nel calcolo di ρ. Ovvero, si calcola innanzitutto il valore Kw0 relativo al caso dell’acqua pura che dipende unicamente dalla temperatura: Kw0 = K00 + 4 (k) 00n T n n=1 dove K00 = 19652.21 e (k) 001 = (k) 148.4206, (k) 002 = −2.327105, 004 = −5.155288 · 10−5 , (k) 003 = 1.360477 · 10−2 , 35 Noto Kw0 si calcola il modulo secante complessivo per l’acqua salata relativa ad una generica coppia di valori di cs e T e per una atmosfera standard (ovvero p = 0). K(cs , T, 0) = K0 + cs [K11 + 3 (k) 11n T n ] + c3/2 [K12 + s n=1 2 (k) 12n T n ] n=1 dove K12 = 7.944 · 10−2 K11 = 54.6746, (k) (k) 1.09987 · 10−2 , 111 = −0.603459, 112 = (k) 121 = 1.6483 · 10−2 , (k) (k) 113 = −6.1670 · 10−5 , 122 = −5.30093 · 10−4 , Infine il modulo secante complessivo Kw relativo allo stato caratterizzato dai parametri cs , T, p è fornito dalla relazione K(cs , T, p) = K(cs , T, 0) + p [K21 + 3 (k) 21n T n ] + p cs [K22 + n=1 2 + p c3/2 s K23 + p [K24 + 2 (k) 24n T n ] + p2 cs [K25 + n=1 2 n=1 2 (k) 22n T n ] (k) 25n T n ] n=1 dove K21 = 3.29908, K22 = 2.2838 · 10−3 , K23 = 1.91075 · 10−4 , K24 = 8.50935 · 10−5 , K25 = −9.9348 · 10−7 , (k) (k) 211 = (k) 1.43713 · 10−3 , 212 = 221 = −1.0981 · 10−5 , (k) 241 = −6.12293 · 10−6 , (k) 251 = 2.0816 · 10−8 , 1.16092 · 10−4 , (k) 222 = −1.6078 · 10−6 , (k) 242 = (k) 252 = 5.2787 · 10−8 , 9.1697 · 10−10 (k) 213 = −5.77905 · 10−7 , 36 9 L’equazione di bilancio di un soluto passivo, nonreattivo Si consideri una miscela fluida (e.g., aria, acqua di mare, acqua e sedimenti sospesi, etc) la cui composizione può variare nello spazio e nel tempo. Si assume che i vari componenti della miscela non influenzino il campo di moto (soluto passivo) e non siano soggetti a reazioni chimiche (soluto non-reattivo). Vogliamo determinare l’equazione differenziale che descrive il comportamento dinamico di un generico componente della miscela. 9.1 Definizioni preliminari La quantità che individua come un dato componente la miscela (nel seguito indicato genericamente come soluto) è la concentrazione,di cui esistono varie definizioni. Sia δV un volume significativo per una descrizione continua della miscela (i.e., (δV )1/3 Lm con m scala spaziale della distanza intermolecolare) ma sufficientemente piccolo da non risentire delle eventuali eteorgeneitá spaziali della distribuzione macroscopica del soluto. Si definisce concentrazione di massa del soluto la quantità: δMs δV →0 δV c = lim (87) Si noti come c abbia come dimensioni massa/lunghezza3 e, per un fluido omogeneo, essa rappresenti la massa specifica del fluido, ovvero, la densitá. Tuttavia, come sarà discusso nel prossimo paragrafo, nell’indagare il trasporto di materia indotto dalla diffusione molecolare conviene introdurre la proporzione ĉ di molecole di soluto presenti nella miscela, ovvero la massa di soluto per unità di massa della miscela fluida. Si noti come ĉ sia una quantità adimensionale e, in generale, sia espressa come parti di soluto per migliaia (ppt) o parti di soluto per milioni (ppm). Il legame che intercorre tra c e ĉ è: c = ρ ĉ (88) Sia poi u la velocitá media della miscela rispetto ad un sistema di coordinate fisso nello spazio mentre sia v la velocità di diffusione del soluto, cioè la velocità con cui le molecole di soluto si muovono rispetto al moto medio della miscela. La velocità assoluta del soluto sará quindi us = u + vs . 37 9.2 Assiomi di Fick Gli assiomi di Fick si riferiscono al caso di una miscela macroscopicamente in quiete (i.e., u = 0), la cui composizione varia nello spazio. Tutte le molecole di soluto (al pari delle molecole degli altri costituenti la miscela) sono soggette ad un continuo movimento che le porta a migrare lontano dalla posizione da esse occupata ad un determinato istante iniziale. Se si individua all’interno della miscela un generico elemento di superficie e la proporzione di molecole di soluto (i.e., ĉ) in corrispondenza dei due lati dell’elemento di superficie è diversa, attraverso l’elemento di superficie si realizzerà un flusso non nullo di molecole di soluto (diffusione molecolare) diretto in modo tale da rendere uniforme la proporzione di molecole di soluto in corrispondenza di entrambe i lati dell’elemento di superficie. È evidente che quando al densità ρ della miscela fluida è spazialmente uniforme, l’assunzione di legare il flusso di molecole ad una non uniforme distribuzione di ĉ è equivalente a legarlo ad una disuniformità di c. Viceversa, nel caso in cui ρ varia nello spazio (ad esempio, in seguito ad una non uniforme distribuzione della temperatura) la tendenza delle molecole a migrare è regolata dalla non uniforme distribuzione di ĉ piuttosto che dalla disuniformità di c. Consideriamo dunque il flusso assoluto di massa definito dal vettore qs = c us . La quantità (qs · n) dS dt rappresenta la massa di soluto che nel tempo infinitesimo dt attraversa l’areola infinitesima dS di normale n (positiva se diretta esternamente a dS). Tale flusso viene valutato sulla base di una relazione costitutiva, detta Prima legge di Fick, del tutto simile all’assioma di Stokes (che definisce i fluidi viscosi) o di Fourier (che definisce i fluidi termoconduttori). Tale legge può essere dedotta per via assiomatica postulando che: • il flusso di massa di soluto é funzione del gradiente della proporzione di molecole di soluto presenti nella miscela, i.e., qs = f (∇ĉ); • il processo é isotropo, non dipende cioé dalla direzione; • il processo é omogeneo, non dipende cioé dalla posizione; • il legame é lineare. Ne consegue una struttura del legame costitutivo della forma: qs = −KD ∇ĉ (89) 38 essendo KD il coefficiente di trasporto relativo alla diffusione delle molecole di soluto. Esso dipende, in generale, da ĉ e dalle caratteristiche locali della miscela, ovvero dalla temperatura e dalla pressione. In particolare, KD tende ad aumentare con la temperatura, é inversamente proporzionale alla pressione mentre risulta praticamente indipendente dalla composizione della miscela. Si noti inoltre come, in virtú del segno − che compare nella (89), il flusso di molecole di soluto sia diretto nel senso delle concentrazioni decrescenti. Nel caso, trattato nel paragrafo successivo, di una miscela in movimento la legge di Fick va scritta con riferimento al flusso di massa relativo di soluto qrs = c (us − u) = c vs , ovvero: qrs = −KD ∇ĉ 9.3 (90) L’equazione della convezione-diffusione La massa di soluto contenuta in un generico volume materiale V é data da Ms = V c dV = V (ρ ĉ) dV . In assenza di reazioni chimiche (soluto nonreattivo) e nell’ipotesi che la sua presenza non influenzi il campo di moto (soluto passivo), il bilancio di massa comporta che dMs /dt = 0. Applicando il teorema del trasporto (cfr., equazioni (5) e (6) con ψ = c = ρ ĉ) si ottiene: d dt c dV V ∂c + us · ∇c + c ∇ · us ] dV V ∂t ∂c [ + ∇ · (c us )] dV = 0 = V ∂t = [ (91) da cui, data l’arbitrarietà di V e tenuto conto che us = vs + u, ∂c + ∇ · (c u) = −∇ · (c vs ) ∂t Ma, in base alla legge di Fick per una miscela in movimento (90) −∇ · (c vs ) = −∇ · qrs = ∇ · (KD ∇ĉ) Inoltre, ∂c + ∇ · (cu) = ĉ ∂t ∂ρ + ∇ · (ρu) + ρ ∂t ∂ĉ + ∇ · (ĉu) ∂t Per cui, tenuto conto che il primo termine tra parentesi quadre a secondo membro rappresenta l’equazione di continuità della miscela nel suo complesso, si ottiene 39 ∂ĉ 1 + ∇ · (ĉ u) = ∇ · (KD ∇ĉ) ∂t ρ (92) Si è già osservato come, in generale, KD dipenda dallo stato locale del fluido (i.e., da p e T ) e, quindi, dalla posizione. E tuttavia, spesso nella pratica, il gradiente di KD è tale da poter assumere che ∇ · (KD ∇ĉ) ∼ = KD ∇2 ĉ. Pertanto l’equazione della diffusione assume la forma ∂ĉ + ∇ · (ĉ u) = κD ∇2 ĉ (93) ∂t dove κD = KD /ρ rappresenta il coefficiente di diffusione molecolare (o diffusività molecolare) avente le dimensioni di una lunghezza2 /tempo. Si noti come, nel caso di un fluido incomprimibile (i.e., ∇ · u = 0) la (93) diventi: ∂c + u · ∇c = κD ∇2 c (94) ∂t Si definisce numero di Schmidt il rapporto Sc = ν/κD . Nel caso dei liquidi valori tipici del numero di Schmidt per miscele binarie si aggirano attorno a 103 . Ad esempio, nel caso di una miscela di N aCl e acqua si ha che κD 1.2 − 1.5 10−5 cm2 /s, rispettivamente per c = 5 − 25% ed una temperatura di 18o C mentre κD 0.9 10−5 cm2 /s, indipendentemente da c, per una temperatura di 5o C. 40 10 In caso del fluido ideale: le equazioni di Eulero e il teorema di Bernoulli In numerosi problemi di interesse pratico risulta sufficiente schematizzare il campo fluido che si vuole studiare introducendo la nozione di fluido ideale. Tale schematizzazione assume che si possano ritenere trascurabili gli effetti connessi alla viscositá per cui µ = 0, λ = 0. Ne consegue che il legame costitutivo di un fluido ideale diventa Tij = −pδij , ovvero le uniche forze di superficie agenti sulla superficie di un arbitrario elemento materiale sono quelle di pressione. E’ innanzitutto evidente come l’equazione di continuitá non subisca alcuna variazione formale rispetto alla (15), in quanto il principio di conservazione della massa prescinde completamente dalla natura del fluido considerato. Per quanto concerne il bilancio di quantitá di moto, sostituendo nelle equazioni del moto di (36) il legame costitutivo proprio di un fluido ideale, Tij = −pδij , si ottengono le cosidette equazioni di Eulero du ρ f− dt che, scritte in forma estesa, porgono: = ∇p dux = ρ fx − dt duy ρ fy − = dt duz ρ fz − = dt (95) ∂p ∂x ∂p ∂y ∂p ∂z Infine, l’equazione (59), che esprime la conservazione dell’energia totale, diventa p 1 ∂p d u2 ( + gh + + ei ) = (96) dt 2 ρ ρ ∂t Nel caso di moto stazionario (ovvero non dipendente dal tempo) da tale equazione discende immediatamente che u2 p + gh + + ei = cost (97) 2 ρ ovvero l’energia totale si mantiene costante lungo ciascuna traiettoria che, data la stazionarietá del moto, coincide con una linea di corrente. 41 Si noti come, anche nel caso di un fluido perfetto, l’energia interna del fluido possa variare in seguito al calore scambiato dall’elemento materiale con il fluido circostante (cfr. equazione (56)). Nel caso in cui, la capacitá del fluido di trasmettere il calore sia trascurabile (i.e., Kc = 0), dalla (97) discende immediatamente il teorema di Bernoulli p u2 + gh + = cost 2 ρ (98) in base a cui in un moto permanente il trinomio dato dalla somma del’energia cinetica, dell’energia potenziale e dell’energia di pressione si mantiene costante lungo ciascuna linea di corrente. 42 A Notazioni Nella dispensa si é deciso di seguire la convenzione secondo cui i vettori e i tensori vengono indicati in grassetto con lettere, rispettivamente, minuscole e maiuscole. Ad esempio i vettori della velocitá e dell’accelerazione sono indicati con u, a mentre i tensori della tensione e della velocitá di deformazione sono indicati con T, D. Gli operatori propri del calcolo vettoriale sono indicati come segue · Prodotto interno di due vettori: a·b · Prodotto esterno di due vettori: a×b · Prodotto tensoriale di due vettori: a⊗b · Prodotto tra due vettori: T:D · Divergenza di un vettore, tensore: ∇ · a, ∇ · T · Gradiente di un vettore, tensore: ∇a, ∇T · Rotore di un vettore: ∇×a Le operazioni tra grandezze vettoriali e tensoriali, d’altra parte, possono essere espresse in modo compatto ed efficace adottando una convenzione largamente utilizzata nella letteratura matematica e fisica, in base a cui • ciascun pedice che compare una sola volta in un termine puó assumere i valori 1, 2, 3. Ad esempio ui denota le tre componenti u1 , u2 , u3 del vettore u, mentre Aij denotano le nove componenti A11 , A12 , A13 , A21 , A22 , A23 , A31 , A32 , A33 del tensore A • ciascun pedice che compare due volte in un termine deve intendersi sommato da 1 a 3. Ad esempio, Aii = A11 + A22 + A33 . Ad esempio, utilizzando tale convenzione scriveremo: a · b = aj bj a ⊗ b = aj bk T:D = Tjk Djk ∂uj ∇·u = ∂xj ∂Tjk ∇·T = ∂xj ∂ui ∇u = ∂xj ∂ui u · ∇ · u = uj ∂xi 43 u · ∇u = uj ∂ui ∂xj Si fa notare come l’operatore divergenza é lineare, si applica a una grandezza vettoriale o tensoriale fornendo come risultato, rispettivamente, una grandezza scalare oppure vettoriale. L’operatore gradiente é anch’esso lineare, si applica a grandezze scalari, vettoriali, fornendo come risultato, rispettivamente, una grandezza vettoriale o tensoriale. Infine, ricorda che il prodotto esterno di due vettori e l’operatore rotore forniscono come risultato un vettore e possono essere rappresentati tramite i due seguenti determinanti simbolici i 1 i2 e2 × e3 = a1 a2 b1 b2 i i2 1 ∂ ∇ × u = ∂x1 ∂x∂ 2 u1 u2 B i3 a3 b3 (99) i3 u3 ∂ ∂x3 (100) Dimostrazione della relazione (2) Dimostrimo che dV =J (101) dV0 con J determinante Jacobiano della trasformazione dalle coordinate lagrangiane X alle coordinate euleriane x. Tale relazione (2) puó essere facilmente dimostrata come segue. Con riferimento alla figura I2a , siano i1 , i2 , i3 i versori del sistema di riferimento cartesiano di assi x1 , x2 , x3 mentre e1 , e2 , e3 siano i versori del sistema di riferimento curvilineo individuato dalle coordinate lagrangiane X1 , X2 , X3 . Ricordando che il coseno dell’angolo αjk che l’asse Xk forma con l’asse xj é pari a (cfr. figura I2b ∂xj (102) ∂Xk é immediato osservare che il vettore dxej rappresentante il lato j-esimo del parallelepipedo obliquo occupato dal fluido al tempo t, puó essere cosı́ essere decomposto rispetto al sistema di assi x1 , x2 , x3 cos αjk = ej = dXj ∂xj ∂xj ∂xj i1 + i2 + i3 ∂X1 ∂X2 ∂X3 (103) 44 D’altra parte, come illustrato graficamente in figura I3 il volume di un parallelepipedo obliquo di lati dX1 e1 , dX2 e2 , dX3 e3 risulta pari a (e2 × e3 ) · e1 dX1 dX2 dX3 . Ricordando che il prodotto esterno e2 × e3 é dato dal seguente determinante e2 × e 3 = i1 ∂x2 ∂X1 ∂x3 ∂X1 i2 ∂x2 ∂X2 ∂x3 ∂X2 i3 ∂x2 ∂X3 ∂x3 ∂X3 dX2 dX3 (104) dopo facili passaggi algebrici si dimostra che dV = JdX1 , dX2 , dX3 , da cui discende immediatamente la (2). C Dimostrazione della relazione (4) Dimostriamo che dJ = J∇ · u dt La derivata del determinante Jacobiano infatti é pari a dJ dt = + + d ∂x1 dt ∂X1 ∂x2 ∂X1 ∂x3 ∂X1 ∂x1 ∂X1 d ∂x2 dt ∂X1 ∂x3 ∂X1 ∂x1 ∂X1 ∂x2 ∂X1 d ∂x3 dt ∂X1 d ∂x1 dt ∂X2 ∂x2 ∂X2 ∂x3 ∂X2 ∂x1 ∂X2 d ∂x2 dt ∂X2 ∂x3 ∂X2 ∂x1 ∂X2 ∂x2 ∂X2 d ∂x3 dt ∂X2 d ∂x1 dt ∂X3 ∂x2 ∂X3 ∂x3 ∂X3 ∂x1 ∂X3 d ∂x2 dt ∂X3 ∂x3 ∂X3 ∂x1 ∂X3 ∂x2 ∂X3 d ∂x3 dt ∂X3 1 (105) Indicato con Ajk il complemento algebrico di ∂xk /∂Xj nello sviluppo del determinante Jacobiano, la (105) puó essere scritta in forma compatta come d ∂xk dJ = Ajk dt dt ∂Xj (106) Ma, 1 La regola di derivazione del determinante di una matrice puó essere facilmente dedotta considerando la derivata del determinante di una matrice 2x2 45 ∂uk ∂uk ∂xi d ∂xk = = dt ∂Xj ∂Xj ∂xi ∂Xj e, in definitiva, ∂uk ∂uk ∂xi dJ = (Ajk )= (Jδki ) = J∇ · u dt ∂xi ∂Xj ∂xi dove δkj indica l’operatore di Kronecker δ= 1 se k = j 0 se k = j (107) 46 Riferimenti bibliografici [1] Bonacina, C., Cavallini, A., Di Filippo, P. e Mattarolo, L., Lezioni di Trasmissione del Calore, Ed. CLEUP, Padova, 1980. [2] Ghetti, A., Idraulica, Ed. Libreria Cortina, Padova, 1981. [3] Lamb, H., Hydrodynamics, Cambridge University Press, 19xx. [4] Rodi, W., Turbulence models and their application in hydraulics - A state of the art review,Institut fur Hydromechanik and Sonderforschungsbereich 80, University of Karlsruhe, Germany, 1980. [5] Shames, I., Mechanics of Fluids, McGraw-Hill, New York, 1992. [6] Spigler, R., Gradiente, Rotore, Divergenza e Applicazioni, Ed. Cortina, 1987. [7] Zemansky, M.W., Abbott, M.M. e Van Ness, H.C., Fondamenti di Termodinamica per Ingegneri, Zanichelli, 1983. 47 Figura 1: Descrizione lagrangiana del campo di moto. La particella (elemento materiale elementare) che all’istante iniziale t0 si trova nella posizione x, con il trascorrere del tempo muta la sua posizione e all’istante t0 + t si trova in P . La posizione della particella ad un generico istante t è individuata dalla traiettoria della particella x = x(X, t). Figura 2: Trasformazione di coordinate dal sistema di riferimento cartesiano ortogonale definito dalle variabili euleriane x1 , x2 , x3 , al sistema di assi curvilinei definito dalle variabili lagrangiane X1 , X2 , X3 . 48 Figura 3: Coseni direttori della trasformazione di assi definita in figura 2a, nel caso bidimensionale. Figura 4: Volume del parallelepipedo obliquo occupato dal volume materiale elementare al tempo t. 49 Figura 5: Definizione dei volumi di controllo V e V . Figura 6: Definizione del tetraedo di Chaucy. 50 Figura 7: Notazioni per l’imposizione delle condizioni cinematica e dinamica in corrispondenza di una superficie di separazione.
Scarica