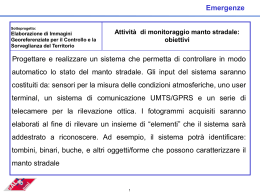
Emergenze Sottoprogetto: Elaborazione di Immagini Georeferenziate per il Controllo e la Sorveglianza del Territorio OBIETTIVO ATTIVITA’ I: progettare e realizzare un sistema che permetta di controllare in modo automatico lo stato del manto stradale. Gli input del sistema saranno costituiti da: sensori per la misura delle condizioni atmosferiche, uno user terminal ibrido, un sistema di comunicazione UMTS/GPRS e un serie di telecamere per la rilevazione ottica. I fotogrammi acquisiti saranno elaborati al fine di rilevare un insieme di “elementi” che il sistema sarà addestrato a riconoscere. Ad esempio, il sistema potrà identificare: tombini, binari, buche, e altri oggetti/forme che possono caratterizzare il manto stradale OBIETTIVO ATTIVITA’ II: questa attività prende generalmente il nome di “target tracking” e consiste nell’inseguimento di un “bersaglio” in una sequenza video IR. Tale attività ha un’importanza fondamentale per diversi campi applicativi come, ad esempio, la videosorveglianza del territorio. L'attività di target tracking prevede la realizzazione di un sistema in grado di processare in tempo reale il video proveniente da una piattaforma mobile utilizzando le informazioni di posizione, assetto e velocità provenienti da una piattaforma inerziale per aumentare precisione e “robustezza” dell’algoritmo di tracciamento del target. Attività I: monitoraggio manto stradale Stato dell’arte riconoscimento forme (100% - completato) Raccolta requisiti utente e scenari applicativi (70% incontro con Provincia/Regione?) Progettazione architettura sistema (90% - quasi completata a meno di valutare l’integrazione di sensori per rilevazione vibrazioni ) Realizzazione sistema (80% - sviluppo di un tool cartografico per la visualizzazione degli eventi) Test sul campo (0% - da iniziare gennaio 2008) Attività II: target tracking Stato dell’arte algoritmi di target tracking IR (100% completato) Raccolta requisiti utente e scenari applicativi (100% completata) Progettazione architettura sistema (100% - completata) Realizzazione sistema (100% - completata) Test di Lab. (50% - da completare entro dicembre 2007) 1 Algoritmo di target tracking Soluzione standard: il target è perso Schema a blocchi dell’algoritmo Soluzione proposta: il target è correttamente seguito per tutta la sequenza video 2 The autonomous aerial platform is equipped with two cameras (a micro color camera and a FLIR camera); cameras were connected to two 2.4 GHz transmitters. The IR camera is a ThermoVision Micron/A10 FLIR micro-camera The aerial platform is a small autonomous aerial vehicle, characterized by 1.0 m wingspan and a total take-off weight of approximately 1.5 kg. It is based on a conventional layout, characterized by a fixed wing, tailless integrated wing-body, tractor propeller driven. The aerial platform is able to fly at speeds ranging from 36 km/h to 72 km/h and at a maximum operating altitude of about 200 m. Forty minutes flights can be achieved at an average speed of about 47 km/h. 3 Monitoraggio manto stradale • È stato sviluppato un tool per la cartografia (basato su Google Maps) in grado di visualizzare una serie di “eventi” riconosciuti: – incidenti – lavori stradali – situazioni meteo • L’applicativo si connetterà al database generato dal sistema di riconoscimento automatico del manto stradale. • Lungo l’itinerario scelto si possono visualizzare informazioni aggiuntive come mostrato in figura 4
Scaricare