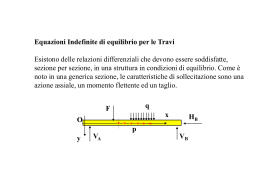
CARATTERISTICHE DELLA SOLLECITAZIONE Abbiamo visto che la trave può essere definita come un solido generato da una figura piana S (detta sezione retta o sezione ortogonale) che si muove nello spazio mantenendosi sempre ortogonale alla traiettoria descritta dal suo baricentro G, che è detta asse della trave, ed in generale non è una retta. Affinché la trave così generata si possa classificare come monodimensionale è necessario che la lunghezza dell’asse della trave sia molto maggiore delle dimensioni delle sezioni. In tale caso tutte le proprietà geometriche della generica sezione possono essere attribuite al corrispondente punto della linea d’asse. In questo modo per analizzare il comportamento della trave ci si può riferire alla sola linea d’asse. La trave è caratterizzata dal fatto che la linea d’asse ha una forma ben definita che può essere rettilinea o curva. La trave si dice piana se il suo asse appartiene ad un piano. Abbiamo inoltre visto che più elementi strutturali possono essere connessi fino a formare una struttura più complessa. Nelle successive applicazioni continueremo ad occuparci di sistemi piani di travi per lo studio dei quali utilizzeremo un modello meccanico rigido. Per illustrare ulteriormente il concetto di schema strutturale, che sia rappresentativo della struttura reale, faremo ricorso a semplici esempi. La prima figura mostra un portale in cemento armato costituito da due elementi collegati al suolo mediante due cerniere e tra loro da una cerniera interna. Il modello geometrico viene definito da una linea che materializza la linea d’asse, mentre i vincoli esterni sono rappresentati con il loro modello di cerniera. Nella seguente figura viene mostrato un altro esempio in cui l’elemento portante la sovrastruttura viene schematizzato mediante il sistema di travi rigide che è sufficientemente rappresentativo della realtà ai fini del calcolo delle razioni vincolari e delle caratteristiche della sollecitazione. Se ai precedenti modelli si aggiunge lo schema rappresentativo delle azioni esterne che gravano sulla struttura, si può giungere a determinare le reazioni vincolari sia interne che esterne. Nulla è stato però ancora detto su quello che accade in una sezione intermedia della struttura. In altre parole, in molte circostanze sorge il problema di individuare l’assetto statico di porzioni di trave e quindi di definire le azioni mutue che parti della trave si scambiano tra loro. 1 Dato un sistema di travi sollecitato da azioni esterne, una volta determinate le reazioni vincolari, si deve procedere alla determinazione dell’interazione che si scambiano due sezioni contigue di una generica trave appartenente al sistema. In altre parole, una volta verificato che l’equilibrio della trave, sorge il problema di individuare l’assetto statico di porzioni di trave e quindi di definire le azioni mutue che parti della trave si scambiano tra di loro. E’ quindi importante determinare l’azione meccanica, supposta esclusivamente di contatto, che due parti di un corpo rigido sezionate da un assegnato piano si scambiano. Come vedremo tali interazioni possono sempre essere ricondotte ad un vettore forza ed un vettore momento agenti su ciascuna sezione che equivalgono alle azioni interne che si scambiano gli elementi infinitesimi della superficie delle due facce a contatto. Fi asse della trave RS MS RS asse della trave MS Il problema può essere formulato nel seguente modo: data una trave vincolata, in equilibrio sotto l’azione delle forze esterne e delle reazioni vincolari supposte note, si vogliono determinare le interazioni che si scambiano due sezioni infinitamente vicine della trave stessa. Tali interazioni possono essere determinate, in accordo al principio di azione e reazione, da considerazioni di equilibrio, una volta che la trave è stata divisa in due parti mediante un taglio lungo la sezione considerata. Consideriamo quindi una trave piana, supposta inizialmente in equilibrio, ed in una generica sezione s si suppone di operare un taglio che divide la trave in due porzioni, I e II. La sezione dopo aver operato il taglio presenta due facce, SI e SII. In accordo al principio di azione e reazioni, nella situazione integra, le due porzioni si trasmettono delle forze mutue uguali e contrarie. Una volta effettuato il taglio, rimuovendo la parte II, per conservare l’equilibrio della porzione I, è necessario applicare nella sezione SI l’azione che la parte II esercitava sulla I prima del distacco. Nella sezione SI le azioni che la porzione II trasmette alla porzione I possono essere ricondotte ad un risultante RS di tutte le forze agenti su II applicato sul baricentro GS della sezione SI e ad un momento risultante MS, pari al momento risultante delle stesse forze rispetto a GS. Per cui RS e MS rappresentano rispettivamente la forza ed il momento equilibranti di tutte le forze agenti sulla porzione I di trave. Inoltre, le forze (in senso generalizzato) RS e MS possono essere anche considerate come risultanti delle forze (in generale forze e coppie) agenti sulla porzione II. FIIi I Fi SI I MS RS MS GS asse della trave II GS RS MS asse della trave SII RS RS MS 2 Analogamente le azioni -RS e -MS che la porzione I esercita sulla porzione II possono essere considerate sia come equilibranti delle forze agenti sulla porzione II, sia come risultanti delle forze agenti sulla porzione I. I vettori RS e MS hanno nello spazio tre componenti ciascuno che possono essere riferite ad una terna cartesiana ortogonale O(x,y,z). Se invece le componenti dei vettori RS e MS sono riferite ad un particolare sistema cartesiano locale, tali componenti sono definite caratteristiche della sollecitazione. La terna locale ha gli assi orientati come indicato in figura, facendo cioè riferimento alla sezione SI: x SI I RS z MS GS II GS MS z y SII RS x y in cui: l’asse z passante per GS ha direzione ortogonale al piano della sezione e quindi è tangente in GS alla linea d’asse della trave e verso uscente dalla porzione di trave; l’asse x ha direzione ortogonale al piano contenente gli assi y e z, quindi tangente al piano della sezione, e verso positivo quando un osservatore impersonificato nell’asse z e con i piedi sul piano xy, vede l’asse x sovrapporsi all’asse y compiendo una rotazione antioraria secondo l’angolo più piccolo; l’asse y ha direzione ortogonale al piano contenente gli assi x e z, quindi tangente al piano della sezione, e verso positivo quando un osservatore impersonificato nell’asse x e con i piedi sul piano zy, vede l’asse y sovrapporsi all’asse z compiendo una rotazione antioraria secondo l’angolo più piccolo Una volta fissati i versi positivi degli assi locali relativi alla faccia SI, quelli relativi alla faccia SII si scelgono opposti in modo tale che scomponendo RS e MS rispetto agli assi locali relativi a SI, o scomponendo gli opposti di RS e MS rispetto agli assi locali relativi alla faccia SII, i segni delle componenti corrispondenti non variano. Scomponendo RS secondo agli assi locali x,y,z relativi a SI, si ottengono le seguenti componenti: GS N z Ty Tx RS x y in cui: N è la componente secondo l’asse z e si definisce sforzo normale; Ty è la componente secondo l’asse y e si definisce sforzo di taglio secondo y; Tx è la componente secondo l’asse x e si definisce sforzo di taglio secondo x; Scomponendo invece il vettore momento MS secondo i medesimi assi si ottengono le seguenti componenti: Mz è la componente secondo l’asse z e si definisce momento torcente; My è la componente secondo l’asse y e si definisce momento flettente secondo y; Mx è la componente secondo l’asse x e si definisce momento flettente secondo x; Le medesime caratteristiche della sollecitazione possono essere ottenute componendo gli opposti di RS e MS secondo gli assi locali relativi a SII. 3 My MS Mz GS z Mx x y Si noti che le caratteristiche della sollecitazione sono relative all’azione che globalmente viene trasmessa attraverso l’intera sezione trasversale, e quindi non dicono nulla sull’entità delle azioni locali nei vari punti della sezione. In un sistema piano, ad esempio nel piano yz, le caratteristiche della sollecitazione della trave si riducono a tre: N, Ty, Mx che si definiscono semplicemente sforzo normale N, sforzo di taglio T, e momento flettente M. In particolare, definito il riferimento locale relativo a SI tale che l’asse z sia tangente alla linea d’asse e y l’asse ad esso ortogonale, lo sforzo normale N e lo sforzo di taglio T rappresentano le componenti della risultante di tutte le forze a destra della sezione SI (cioè la risultante di tutte le forze agenti sulla porzione II) secondo l’asse z e l’asse y rispettivamente. Il momento flettente M rappresenta invece la componente secondo l’asse x del momento risultante rispetto a GS di tutte le forze agenti sulla porzione II. Analogamente se si fa riferimento alla porzione SI. FII FI MA MB RA A B S FI MA A RS RA y SI T T z N FII RS M=MS z N M=MS SII Nell’ipotesi di spostamenti infinitesimi è possibile calcolare le caratteristiche della sollecitazione in una trave attraverso le sole condizioni di equilibrio sulla configurazione indeformata. Ricapitolando, per determinare le caratteristiche di sollecitazione si procede nel seguente modo: − Si considera una generica sezione normale della trave. Si riduce al polo GS (baricentro della sezione) il sistema delle forze attive e reattive che agiscono sulla parte che precede la sezione trasportando ogni forza nel punto GS e aggiungendo la corrispondente coppia di trasporto. − La sollecitazione nella sezione è quindi definita dalla forza risultante RS e dal momento risultante MS, rispetto al polo G, delle forze attive e delle reazioni vincolari che precedono la sezione. Si osserva che RS e MS rappresentano l’azione che la parte di corpo che precede la sezione trasmette alla parte di corpo che segue la sezione − Spostando la sezione lungo l’asse del corpo, la sollecitazione varia. Questo come conseguenza dello spostamento del polo di riduzione GS e della presenza di nuove forze nella parte del corpo che precede la sezione considerata. 4 − Scomponendo RS e MS nel sistema di riferimento locale si ottengono le caratteristiche della sollecitazione N, T, M. − Si costruiscono a questo punto i diagrammi delle caratteristiche della sollecitazione che sono la rappresentazione grafica dell’andamento di queste caratteristiche al variare della posizione della sezione lungo l’asse della trave. In relazione alla figura precedente, si prendono in considerazione tutte le forze, reazioni comprese, che agiscono sul tronco di sinistra rispetto alla sezione S e si effettua: ai fini del calcolo dello sforzo normale, la somma delle loro componenti secondo la tangente in S all’asse della trave (asse z per la trave piana); ai fini del taglio, la somma delle componenti secondo la normale in S all’asse della trave (asse y); e ai fini del momento flettente la somma dei momenti rispetto al baricentro GS di S. Le caratteristiche si possono ricavare prendendo tutte le forze, reazioni comprese, che agiscono sul tronco a sinistra di S ed effettuando la loro somma secondo le tre direzioni. Le corrispondenti componenti vettoriali rappresentano l’azione che la porzione a sinistra di S esercita su quella a destra e cioè l’azione che la porzione che sta dalla parte negativa degli assi di riferimento locale esercita su quella che sta dalla parte positiva. Pertanto sforzo normale, taglio e momento flettente sono da ritenersi positivi se le componenti in parola hanno verso opposto agli assi della terna locale. N N S z G M M y z z T T x y y z y Lo sforzo normale è positivo se di trazione (se genera trazione nel concio elementare), negativo se di compressione. Il taglio è positivo se tende a far ruotare la parte su cui agisce in senso orario (se tende a far ruotare il concio elementare in senso orario). Il momento flettente è positivo se di verso opposto a x (cioè se il verso di rotazione è orario). Il momento flettente è positivo se produce trazione nelle fibre che si trovano dalla parte positiva dell’asse y. Si può anche indicare che il momento flettente è positivo se equivale ad una coppia che tende le fibre inferiori e comprime quelle superiori del concio elementare (per travi ad asse non orizzontale la parte inferiore della trave, detta anche intradosso, viene di solito indicata con un tratteggio). Prendendo in considerazione le forze che agiscono sul tronco a destra si considerano positive le caratteristiche della sollecitazione se le componenti sono opposte a quelle sopra indicate. In un corpo rigido è possibile determinare solo le caratteristiche globali del sistema di forze di contatto, non la loro distribuzione puntuale. Determinate le sollecitazioni, esistono infatti infinite distribuzioni di forze equilibrate equivalenti: il problema è perciò staticamente indeterminato. Le caratteristiche della sollecitazione sono le grandezze duali delle distorsioni, così come le reazioni vincolari sono le grandezze duali dei cedimenti vincolari. Le sollecitazioni sono determinabili in modo univoco, solo se la trave è monoconnessa. Infatti, se la trave è pluriconnessa, esplicitando il vincolo di continuità non si divide il corpo in due parti, cosicché il numero delle equazioni di equilibrio non aumenta. La trave pluriconnessa è quindi staticamente indeterminata per vincoli interni. 5 Caso particolare ma di notevole importanza, perché in esso rientrano molte delle applicazioni tecniche, è quello della trave ad asse rettilineo. In questo caso, prendendo ad esempio in esame travi rettilinee orizzontali, si assumo come riferimenti positivi quelli rappresentati nella seguente figura: N T z z z M In particolare, mentre nei diagrammi delle componenti N e T si specifica sempre il segno positivo o negativo, il diagramma del momento, indipendentemente dal segno, va sempre disegnato dalla parte delle fibre tese. Consideriamo l’esempio in figura costituito da una mensola soggetta all’estremo B ad una forza verticale F1 ed una forza orizzontale F2. Per ogni sezione S della trave esistono le azioni interne, che vengono dunque ad essere funzioni dell’ascissa z. F1 A B z F1 F1L F2 F2 F2 F1 L Dopo aver calcolato le reazioni vincolari, si effettua un taglio in una generica sezione individuata dall’ascissa z. Si separano le due parti di trave e si mettono in evidenza le azioni interne. F1L G(z) F2 M(z) N(z) F1 M(z) N(z) F1 G(z) F2 T(z) T(z) Si mette in equilibrio una delle due parti, preferibilmente quella che conduce a conti più semplici. Conviene scrivere equazioni di equilibrio alla traslazione lungo le direzioni tangenti e perpendicolari all’asse della trave z e alla rotazione attorno a G(z). Si ottengono così tre equazioni disaccoppiate: la prima fornisce direttamente N(z), la seconda T(z), la terza M(z). Parte di destra →: − N ( z ) + F2 = 0 ⇒ N ( z ) = F2 ↑: G(z) (+antiorario): Parte di sinistra →: ↑: G(z) (+antiorario): T (z ) − F1 = 0 ⇒ T (z ) = F1 − F2 + N (z ) = 0 ⇒ ⇒ ⇒ N ( z ) = F2 − M (z ) − F1 (L − z ) = 0 ⇒ F1 − T (z ) = 0 M ( z ) + F1 L − F1 z = 0 M (z ) = − F1 (L − z ) T (z ) = F1 M (z ) = − F1 (L − z ) Dopo aver ottenuto l’andamento analitico delle azioni interne se ne tracciano i grafici. F2 N(z) F1 T(z) F1L M(z) 6 Consideriamo ora l’esempio di una trave appoggiata soggetta ad una distribuzione uniforme di carico p. p A z B L y Consideriamo ora il tratto di sinistra precedente la generica sezione S: p T T − R Ay + pz = 0 M z x S y ∑ M S = − R Ay z + p T = R Ay − pz z2 +M =0 2 M = R Ay z − p z2 2 RAy=pL/2 Consideriamo ora il tratto di destra: y p M z T T + R By − pz = 0 T = − R By + pz x ∑ S M S = RBy z − p z2 −M =0 2 M = RBy z − p z2 2 RBy=pL/2 T pL/2 z + − pL/2 z M pL2/8 Relazioni differenziali tra i carichi ripartiti e le caratteristiche della sollecitazione in sistemi di travi piane rettilinee – Equazioni indefinite di equilibrio Per il tracciamento dei diagrammi sono molto utili le relazioni differenziali tra carico ripartito e caratteristiche della sollecitazione. Le caratteristiche N, T e M variano generalmente da sezione a sezione, perciò risultano funzione dell’ascissa z della sezione considerata: N = Ν(z) T = Τ(z) M = Μ(z) Le equazioni indefinite di equilibrio esprimono il legame esistente, in ogni sezione, fra i carichi esterni distribuiti e le caratteristiche di sollecitazione, e tra il momento flettente e lo sforzo di taglio, affinché in ogni sezione vengano soddisfatte le condizioni di equilibrio. Si cercherà quindi di stabilire delle relazioni, che saranno di tipo differenziale, tra carichi e caratteristiche della sollecitazione. Si consideri un tratto di una generica trave soggetto ad un carico distribuito p(z) perpendicolare all’asse della trave e ad un carico distribuito assiale n(z) secondo l’asse della trave (per semplicità 7 non si considera il contributo di un sistema di coppie distribuite, poco diffuso nelle applicazioni). Si immagini di isolare un tratto elementare (infinitesimo) della trave, definito da due sezioni S1 ed S2 disposte a distanza infinitesima dz (compreso tra la sezione di ascissa z e quella di ascissa z+dz.). Supponendo di trovarsi in condizioni di debole curvatura della trave, le due facce del tratto elementare possono essere considerate parallele. dz n(z) p(z) S1 S2 asse della trave O z y N N+dN Diagramma N(z) T T+dT Diagramma T(z) M M+dM Diagramma M(z) z z+dz Una volta operati i due tagli necessari per isolare l’elemento di trave, per il principio di azione e reazione sul concio elementare agiranno le forze indicate nella figura seguente. n(z) p(z) M+dM M N N+dN A T+dT T S1 z z+dz S 2 z dz Il tratto elementare dz è quindi soggetto ad un carico distribuito p(z) ortogonale all’asse della trave e ad un carico distribuito assiale n(z) secondo l’asse della trave. 8 Sulla faccia corrispondente alla sezione S1 agiscono: il taglio T ed il momento M (che supponiamo positivi) e lo sforzo normale N (che supponiamo positivo, cioè di trazione). Questi valori sono equivalenti a tutte le forze esterne che precedono la sezione S1. Sulla faccia corrispondente alla sezione S2, infinitamente vicina alla sezione S1, agiscono le caratteristiche della sollecitazione T+dT, M+dM ed N+dN, dove dT, dM e dN sono rispettivamente le variazioni infinitesime delle caratteristiche T, M ed N corrispondenti all’incremento dz dell’ascissa z. T+dT, M+dM ed N+dN sono equivalenti a tutte le forze esterne che seguono la sezione S2. Le equazioni di equilibrio del tratto elementare forniscono le relazioni differenziali cercate: Fz = 0 − N + n( z )dz + ( N + dN ) = 0 (1) ∑ ∑F y ∑M =0 A =0 − T + p ( z )dz + (T + dT ) = 0 (2) ⎛ dz ⎞ M + Tdz − p ( z )dz ⎜ ⎟ − ( M + dM ) = 0 ⎝ 2⎠ (3) dove: • n(z)dz è il risultante del carico ripartito assiale distribuito sulla lunghezza infinitesima dz. Essendo dz infinitesimo, è possibile considerare n(z) costante in tale tratto e pari al valore che assume all’ascissa z (sezione S1). • p(z)dz è il risultante del carico ripartito perpendicolare all’asse distribuito sulla lunghezza infinitesima dz, anche in questo caso è lecito considerare p(z) costante e pari al valore che assume all’ascissa z (sezione S1), il suo risultante sarà pertanto applicato a metà del tratto dz e cioè a distanza dz/2 dal punto A. • I momenti orari sono considerati positivi e quelli antiorari negativi. Dalla (1) si ha: − N + n( z )dz + ( N + dN ) = 0 Æ ovvero: − N ( z ) + N ( z + dz ) + n( z )dz = 0 al limite per dz→0 dN = − n(z ) dz N ( z + dz ) − N ( z ) ⇒ + n( z ) = 0 dz dN + n( z ) = 0 dz Dalla (2) si ottiene: − T + p ( z )dz + (T + dT ) = 0 Æ ovvero: − T ( z ) + T (z + dz ) + p ( z )dz = 0 al limite per dz→0 dT = − p(z ) dz T ( z + dz ) − T ( z ) ⇒ + p(z ) = 0 dz dT + p( z ) = 0 dz Dalla (3) risulta: − M − Tdz + p( z ) dz 2 + (M + dM ) = 0 2 trascurando l’infinitesimo di ordine superiore p( z ) − M − Tdz + M + dM = 0 Æ dz 2 , si ha 2 dM =T dz ovvero: − M ( z ) + M ( z + dz ) − T ( z + dz ) + p( z )dz dz =0 2 ⇒ M (z + dz ) − M ( z ) p(z ) − T ( z + dz ) + dz = 0 dz 2 9 al limite per dz→0 dM −T = 0 dz Infine, sostituendo T = dM dT nella espressione = − p(z ) si ottiene anche che: dz dz d 2M = − p( z ) dz 2 Riassumendo, le tre relazioni differenziali trovate stabiliscono che: • la derivata dello sforzo normale rispetto alla variabile z è uguale al carico ripartito assiale: dN = − n(z ) ; dz • la derivata dello sforzo di taglio rispetto alla variabile z è uguale al carico ripartito normale all’asse della trave, cambiato di segno. Quindi, la derivata del diagramma del taglio (pendenza della curva) è uguale, ma con segno opposto, al valore del carico ripartito p(z) alla stessa dT ascissa. = − p(z ) ; dz • la derivata del momento flettente rispetto alla variabile z è uguale allo sforzo di taglio. Perciò, la derivata del diagramma dei momenti flettenti (pendenza) è uguale al valore del taglio T alla dM =T . stessa ascissa dz Dalle tre precedenti espressioni differenziali si ricavano le caratteristiche della sollecitazione nella generica sezione S di ascissa zs: zs ∫ N s = − n( z )dz + C 0 0 zs ∫ Ts = − p ( z )dz + C1 0 zs ∫ M s = Tdz + C 2 0 le costanti C0, C1 e C2 si determinano in base alle condizioni iniziali (rappresentano le caratteristiche della sollecitazione all’origine dell’asse z). d 2M L’ultima relazione trovata, = − p ( z ) , stabilisce infine che la derivata seconda del momento dz 2 flettente M è pari alla componente secondo z del carico distribuito cambiata di segno. Osservazioni: Nei tratti scarichi (p(z)=0) il taglio T è costante o nullo ed M varia linearmente o è costante. Infatti con p(z)=0 risulta: 1) Tz = C1 = costante o nullo xs ∫ M z = C1dz + C 2 = C1 z s + C 2 0 Il momento flettente è costante soltanto se è nullo lo sforzo di taglio 2) Nei tratti soggetti a carichi distribuiti (p(z)≠0) T ed M variano con leggi continue: • se p(z)=costante Tz varia con legge lineare (primo grado) Mz varia con legge di secondo grado (parabolica) • se p(z) varia con legge lineare Tz varia con legge di secondo grado Mz varia con legge di terzo grado 10 Si osservi che la funzione del taglio cresce di un grado rispetto al carico ripartito, e che la funzione del momento flettente cresce di un grado rispetto al taglio. 3) Nelle sezioni in cui lo sforzo di taglio si annulla, il momento flettente risulta massimo (derivata prima nulla, derivata seconda negativa) o minimo (derivata prima nulla, derivata seconda positiva). T z + − z M 4) 5) 6) Se in un tratto della trave il taglio è nullo (T=0), il momento flettente è costante. Se lo sforzo di taglio è diverso da zero (T≠0), esiste sempre il momento flettente (può annullarsi in qualche sezione ma non in un tratto finito). La componente trasversale (ortogonale all’asse della trave) di un carico concentrato P produce, una discontinuità nel diagramma dello sforzo normale, una discontinuità nel diagramma del taglio, e un punto angoloso nel diagramma del momento flettente (figura a). In corrispondenza di una coppia concentrata M il diagramma del momento presenta un salto pari alla coppia, mentre rimane inalterato il taglio (figura b). P TA TA TB A B TB M A NB B N T z − T + Py TA=tgα z z TB=tgβ − M α z α TA= TB =tgα + NB=Pz z M β M (a) 7) (b) Il diagramma di carico p(z) fornisce per ogni punto dell’asse z della trave l’inclinazione della tangente al diagramma di T(z). Il diagramma di T(z) fornisce a sua volta l’inclinazione della tangente al diagramma M(z). T z Tz p(z)>0 T>0 + T>0 T=0 − pendenza negativa dT/dz<0 z z dM/dz<0 dM/dz>0 dM/dz=0 Mz 11 8) 9) 10) In corrispondenza del punto di nullo del diagramma di carico il diagramma della forza tagliante ha un punto di stazionarietà è il momento flettente ha un punto di flesso (o una singolarità di ordine superiore). La forza tagliante è massima se il carico è crescente (dp/dz>0), è minima se il carico è decrescente (dp/dz<0). In corrispondenza del punto in cui T(z) interseca l’asse z il diagramma del momento flettente ha un punto di stazionarietà, che è un punto di massimo se p>0, di minimo se è p<0, di flesso se è p=0 e dp/dz≠0. d 2M La relazione = − p ( z ) indica la concavità del diagramma del momento flettente. dz 2 p(z) z d 2M >0 dz 2 2 d M <0 dz 2 M(z) La pendenza in un punto del diagramma di taglio è quindi data, a meno del segno, dall’intensità locale del carico ripartito p. La pendenza in un punto del diagramma dei momenti rappresenta la forza di taglio in quel punto. La tangente al diagramma del momento in ogni sezione viene data dal valore del taglio nella stessa sezione. Al taglio positivo corrisponde un coefficiente angolare negativo (\), mentre al taglio negativo corrisponde un coefficiente angolare positivo (/). Si vuole infine far rilevare che nel tracciare i diagrammi delle caratteristiche della sollecitazione bisogna sempre verificare che le varie parti della struttura risultino in equilibrio. Ad esempio nei nodi (punti angolosi) dell’asse della trave, è necessario verificarne l’equilibrio. Nell’esempio in figura per il nodo A sarà necessario verificare che Fz = 0 e ∑ Fy = 0 . ∑ TA3 Nodo A 1 TA2 1 3 Nodo A 3 NA2 2 2 Nodo A TA3 Trave 1 Trave 2 NA2 TA2 Trave 3 Inoltre, per quanto riguarda il momento flettente, se il nodo è tra due aste e non vi sono coppie concentrate, esso assumerà lo stesso valore. In tale caso il diagramma del nodo si prosegue ribaltando il valore del momento valutato a sinistra o a destra del nodo, perpendicolarmente all’asse del tratto successivo prestando attenzione alla parte dove le fibre sono tese. Si dovrà verificare in questo caso che ∑ M A = 0 . 12 Nel caso invece di nodi sottoposti a coppia concentrata esterna, nel nodo si avrà una discontinuità di valore pari alla coppia esterna. MA MA Nodo A MA MA Nodo A Nei nodi ove concorrono più di due aste, per l’equilibrio del nodo, la somma algebrica dei momenti valutati in corrispondenza del nodo stesso deve essere nulla. Le relazioni differenziali, se associate ad opportune condizioni ai limiti imponibili in particolari sezioni in cui le caratteristiche siano note a priori, si prestano alla determinazione delle leggi di variazione delle caratteristiche stesse senza passare attraverso la preventiva valutazione delle reazioni vincolari. Riprendiamo in esame la trave appoggiata vista in precedenza. p A z B L y d 2M dT = − p( z ) e tenendo conto della = − p( z ) , si ha: 2 dz dz z2 dM M = −p + C1 z + C 2 = T = − pz + C1 2 dz Integrando due volte ambo i membri della Le condizioni imposte dai vincoli sono M(0)=M(L)=0, da cui si ottiene: C1 = C2 = 0 ⎞ ⎛L − z⎟ 2 ⎠ ⎝ T= che forniscono quindi: T = p⎜ ( p Lz − z 2 2 pL 2 ) Consideriamo ora il tratto di sinistra precedente la generica sezione S: p T T − R Ay + pz = 0 M z x ∑ S y M S = − R Ay z + p T = R Ay − pz z2 +M =0 2 M = R Ay z − p z2 2 RAy=pL/2 Consideriamo ora il tratto di destra: y p M z T T + R By − pz = 0 T = − R By + pz x ∑ S M S = RBy z − p z2 −M =0 2 M = RBy z − p z2 2 RBy=pL/2 13 Il valore dello sforzo di taglio in una data ascissa z rappresenta il valore della tangente trigonometrica dell’angolo che la tangente in quel punto al diagramma del momento flettente forma rispetto alla fondamentale. In particolare se lo sforzo di taglio è positivo, l’angolo che la tangente trigonometrica forma con la fondamentale di riferimento è, assumendo positiva una rotazione oraria, minore di 90°; se invece il taglio è negativo, l’angolo risulta maggiore di 90°. Nei punti in cui il diagramma del taglio è nullo il momento ha ovviamente tangente geometrica parallela alla fondamentale. T tgα + z − z α<90° β>90° M γ=0° Dal precedente diagramma si può inoltre notare che nei tratti in cui il taglio è costante, la pendenza del diagramma del momento flettente è costante, mentre al crescere del taglio, nei tratti a taglio variabile linearmente, la pendenza della tangente al diagramma del momento aumenta (la pendenza della tangente al diagramma del momento diminuisce al diminuire del taglio). ESEMPIO 1: Mensola soggetta a carico uniformemente ripartito p z A B L y Determinazione delle reazioni vincolari: L2 (verso antiorario) MA = p RAz = 0 RAy = pL 2 Con riferimento alla figura si ha che in una generica sezione di ascissa z le espressioni delle caratteristiche di sollecitazione sono: Sforzo normale. Poiché RAz = 0 lo sforzo normale è nullo. T p p RAy=pL A 2 MA=(pL )/2 B zs y L s Mz z RAy=pL MA=(pL2)/2 M Tz A z s Taglio Per una generica sezione s a distanza zs dall’origine (punto A) lo sforzo di taglio risulta uguale al risultante di tutte le forze esterne (attive e reattive) che precedono la sezione esaminata. Si ricorda che lo sforzo di taglio è positivo quando fa ruotare in senso orario il concio elementare (a ciò corrisponde l’asse T illustrato in figura: tutte le forze che sono orientate nel verso positivo dell’asse T producono una rotazione oraria). Tz = RAy – pzs = pL − pzs 14 Poiché il carico è uniformemente ripartito, come atteso, il taglio è una funzione di primo grado in z. TA = pL (in A il taglio è dato direttamente dalla reazione ortogonale Per zs = 0 (punto A) alla linea d’asse) TB = 0 Per zs = L (punto B) Si noti che in B, estremo libero, il taglio è zero in quanto non ci sono applicate direttamente forze in direzione verticale. Momento flettente Il momento flettente è definito come il momento risultante, rispetto al baricentro della sezione considerata, di tutte le forze esterne (attive e reattive) che agiscono sulla parte di trave che precede la sezione, in questo caso occorre tenere conto della presenza del momento di incastro MA. Assumiamo positivi le coppie che tendono le fibre inferiori (l’asse positivo del momento sarà quindi quello indicato in figura). Si ha quindi: pz s2 zs pL2 Mz = − + pLz s − M z = M A + R Ay ⋅ z s − pz s ⋅ 2 2 2 Come si può notare l’equazione del momento è l’equazione di una parabola di secondo grado. dM D’altra parte, ricordando la relazione = T , essendo il taglio descritto da un’equazione di primo dz grado, il momento sarà di un ordine superiore. Ciò poteva anche essere ricavato ricordando l’espressione che lega direttamente momento flettente e carico ripartito: d 2M = − p( z ) . dz 2 pL2 MA = − (è negativo in quanto tende le fibre superiori) Per zs = 0 (punto A) 2 MA = 0 Per zs = L (punto B) Possiamo quindi disegnare i diagrammi, ricordando che il diagramma del momento flettente si disegna sempre dalla parte delle fibre tese: T TA=pL + M MA=(pL2)/2 Essendo il taglio positivo e decrescente, la pendenza della tangente alla curva del momento è sempre negativa e decrescente. Quindi la concavità è rivolta verso l’alto. ESEMPIO 2: Trave appoggiata con carico ripartito lineare Si consideri una trave appoggiata agli estremi e soggetta ad un carico ripartito crescente con legge lineare da zero al valore massimo p0. p0 B A p0 z A L y B z z L y 15 Con riferimento alla figura, la legge di variazione del carico p(z) è: p(z) = p0 z L dove p0 è il carico unitario massimo per z=L p0 z 2 1 e Inoltre, il risultante del carico ripartito che precede una sezione di ascissa z vale p(z)z = 2 2L dista z/3 dalla sezione considerata. Le reazioni dei vincoli si possono determinare mediante le equazioni di equilibrio e risultano (RBz=0): p L p L RB = 0 RAy = 0 6 3 Si osservi che non essendoci forze (attive e/o reattive) agenti parallelamente all’asse della trave, lo sforzo normale è nullo. Per stati di sollecitazione piani, lo sforzo di taglio T in una sezione generica s è uguale al risultante delle componenti verticali di tutte le forze (attive e reattive) che precedono la sezione. T p0 z A B z y s p(z)=p0z/L Mz A RAy=p0L/6 M Tz s Quindi nella sezione s corrispondente all’ascissa z , si ha: ⎛ L z2 ⎞ p L p z2 p z2 ⎟ = 0 − 0 = p0 ⎜⎜ − Tz = RA − 0 ⎟ 2L 6 2L ⎝ 6 2L ⎠ Si osserva che, essendo il carico distribuito linearmente, lo sforzo di taglio varia con legge di secondo grado. Per stati di sollecitazione piani, il momento flettente Mz nella sezione generica è dato dal momento risultante rispetto al baricentro della sezione di tutte le forze (attive e reattive) che precedono la sezione considerata. Quindi il momento flettente nella sezione s a distanza z da A risulta: p ⎛ p z2 z p L p z2 z z3 ⎞ = 0 z− 0 Mz = RA z − 0 = 0 ⎜⎜ Lz − ⎟⎟ L⎠ 2L 3 6 2L 3 6 ⎝ Il momento flettente è quindi descritto da una parabola del terzo ordine. L’ascissa z corrispondente al massimo momento flettente si ottiene dalla condizione Tz=0 (la sezione in cui lo sforzo di taglio si annulla presenta il massimo, in valore assoluto, momento flettente): ⎛ L z2 ⎞ L z2 L L2 2 ⎟=0 ⇒ Tz=0 ⇒ ⇒ p0 ⎜⎜ − ≅ 0.577 L ⇒ z= − = 0 z = ⎟ 6 2L 3 3 ⎝ 6 2L ⎠ essendo Mz = p0 6 ⎛ z3 ⎞ L ⎜ Lz − ⎟ , per z = ≅ 0.577 L si ha: Mz,max ≅ 0.064 p0L2 ⎜ ⎟ L⎠ 3 ⎝ Le caratteristiche della sollecitazione si possono anche ottenere mediante l’integrazione delle relazioni differenziali tra le caratteristiche della sollecitazione e i carichi ripartiti, ovvero tramite le equazioni indefinite di equilibrio: 16 zs zs ∫ zs ∫ N s = − n( z )dz + C 0 ∫ Ts = − p ( z )dz + C1 0 M s = Tdz + C 2 0 0 Nel caso della trave appoggiata con carico ripartito triangolare, essendo p(z)= zs p0 z, si ha: L zs ⎛ L z2 ⎞ p0 L p z2 p L = − 0 s + 0 = p 0 ⎜⎜ − s ⎟⎟ 6 2L 6 ⎝ 6 2L ⎠ 0 0 dove TA è il valore dello sforzo di taglio per z=0 (appoggio A) che corrisponde alla reazione RA. p p Ts = − 0 zdz + T A = − 0 L L ∫ zs ∫ zdz + zs ⎛ L z2 ⎞ p ⎛ z3 ⎞ ⎟dz + 0 = 0 ⎜ Lz s − s ⎟ p 0 ⎜⎜ − ⎟ 6 ⎜⎝ L ⎟⎠ ⎝ 6 2L ⎠ 0 0 dove MA è il valore del momento flettente per z=0 (appoggio A) che è nullo (MA=0). ∫ M s = Tdz + M A = ∫ P0L/6 + − P0L/3 0.577L = L/ 3 Mmax= 0.064p0L2 ESERCIZIO 1 Valutare i diagrammi N, T, M per il sistema di travi in figura soggetto ad un carico uniformemente ripartito. p B A C D L Struttura Schema di calcolo L L E L L 17 Procediamo innanzitutto al calcolo delle reazioni vincolari: p B A C D RBy L REx E REy L ΣFx = 0 Σ MB = 0 ΣFy = 0 ⇒ ⇒ ⇒ L L L REx = 0 REy 2L – p 4L L = 0 ⇒ – p 4L + RBy + 2pL= 0 REy = 2pL ⇒ RBy = 2pL Riepilogo reazioni p B A C D E L 2 pL RBy=2pL E REx=0 REy=2pL 2 pL REy=2pL L L L L Sforzo Normale. Lo sforzo normale è presente solo nella trave CE ed è N= 2 pL. Per determinare tale valore si opera un taglio in corrispondenza di una sezione s partendo indifferentemente dal punto C o dal punto E, considerando un’ascissa z coincidente con l’asse della trave. Se partiamo da C, dobbiamo innanzitutto ridurre tutto il sistema di forze che precede la sezione al punto C. Si trasporteranno cioè tutte le forze che precedono la sezione nel punto C. Come noto al trasporto di una forza segue in generale la nascita di un momento di trasporto che verrà considerato nel diagramma del momento flettente. In questo caso interessa determinare le componenti delle forze nella direzione dell’asta CE. RBy=2pL p A B RBy=2pL 2pL 4pL C D z Nz C C Nz Nz s E s s 2 =– 2 pL (di compressione) 2 Si può constatare che si ottiene lo stesso risultato partendo più convenientemente dal punto E. NzCE = –2pL 18 C B A N D E 2 pL Per quanto riguarda lo sforzo di taglio, è conveniente partire dal punto A per il corpo AB, dal punto B per il tratto BC, dal punto D per il tratto DC e dal punto E per il tratto EC. TzAB = –pz ⇒ TA= 0 TB = –pL BC TB= pL TC = 0 Tz = –pL +2pL –pz ⇒ DC ⇒ TD=0 TC = 2pL Tz = pz TzEC = – 2 pL = cost. TzCE = 2pL 2 2 2 – 4pL = – 2pL = – 2 pL 2 2 2 pL 2pL B A C T D pL E 2 pL Si noti che nel punto B il diagramma presenta una discontinuità pari al valore della reazione vincolare. Per quanto riguarda il momento flettente si parte dagli stessi punti considerati per il taglio. z2 L2 ⇒ MA= 0 MB = –p 2 2 2 2 L z L2 MzBC = –p +2pLz –p –pLz ⇒ MB= –p MC = 0 2 2 2 z2 MzDC = –p ⇒ MD=0 MC = –2pL2 2 EC Mz = 2 pLz ⇒ ME=0 MC = 2 pL 2 L = 2pL2 2 2 2 – 4pL = – 2pL = – 2 pL MzCE = 2pL 2 2 2 MzAB = –p 2pL2 pL2/2 M A C B D 2 pL E E E Equilibrio nodo E 2pL2 2pL 2 pL 2 pL 2pL2 19 Ricapitolando, si osserva che se la struttura include tratti ad asse inclinato gli sforzi normali e di taglio devono essere valutati rispetto agli assi locali di ogni singolo tratto. Si osservi che il vettore momento (momento flettente) risulta sempre ortogonale al piano di riferimento e perciò non cambia al variare dell’orientamento degli assi locali. Per la valutazione delle caratteristiche della sollecitazione si procede analizzando ciascun tratto. All’inizio di ogni tratto dovrà tenersi conto della sollecitazione presente nel punto i origine degli assi locali, cioè sarà considerata la riduzione rispetto a tale punto di tutte le forze attive e reattive che agiscono sulla parte precedente della struttura. Consideriamo ora la seguente trave appoggiata, in cui una parte del carico ripartito grava su un tratto inclinato di trave (in questo caso di 45°). p p A A B B L RAy=pL C C Rcy=pL L L Una volta ricavata le reazioni vincolari, per procedere con il calcolo delle caratteristiche della sollecitazione è necessario scomporre il carico ripartito p nelle componenti trasversale ed assiale al tratto BC. Infatti il carico p è definito con riferimento alla proiezione orizzontale mentre la linea d’asse del tratto BC è inclinata rispetto all’orizzontale. Tale carico, definito per unità di lunghezza orizzontale, può essere ricondotto all’ascissa z parallela all’asse della trave e decomposto in una componente q ortogonale all’asse della trave ed una componente n parallela all’asse, entrambe riferite all’unità di lunghezza inclinata (1/cosα). psenα α p p ⇓ pcosα q = pcos2α n = psenαcosα B α componente trasversale componente assiale q L/cosα 1 n C 1/cosα q = q(z) = n = n(z) = z p cos α = p cos2α 1 cos α psenα = p senα cosα 1 cos α 20 In questo caso si ha: q =p cos245° = p/2 n = p sen45° cos45° = p/2 p A B z z RAy=pL pL 2 C 2 Rcy=pL pL 2 2 Sforzo Normale: NzAB = 0 2 p + z NzCB = – pL 2 2 ⇒ NC = – pL Taglio: TA = pL TzAB = pL -pz ⇒ 2 p + ⇒ TzCB =– pL z 2 2 2 2 2 p + 2 2 NC = – pL TB = 0 2 TC = – pL 2 TB = – pL 2 p + 2 2 2L=0 2L=0 Momento flettente (positivo se tende le fibre inferiori, all’intradosso): MzAB z2 = pLz – p 2 MzBC 2 p z2 = pL z– 2 2 2 ⇒ L2 MB = p 2 MA= 0 ⇒ MC= 0 p 2L– 2 ( 2L) 2 2 pL 2 /2 C L2 2 T pL B =p B A N A 2 MB = pL 2 C pL 2 /2 Il diagramma del momento flettente si disegna dalla parte delle fibre tese. A B M pL2/2 C 21 ESERCIZIO 2 Determinare le reazioni vincolari esterne ed interne. Disegnare i diagrammi delle caratteristiche della sollecitazione indicando i valori significativi L=6m p = 20 kN/m P = 90 kN E 2L P p B p D C 2L F A L L 2L Per determinare le reazioni vincolari, conviene partire dal sistema costituito dai due corpi. Considerando REy orientata verso il basso, si ha: Corpo ABCDEF ΣMA=0 ⇒ – p 2L L – P L + p 2L 3L – REy 4L = 0 ⇒ REy = 97.5 kN Riepilogo reazioni vincolari REy=97.5 kN E L=6m p = 20 kN/m P = 90 kN 1) 12 90 kN RCy=97.5 kN C 20 kN/m B RCx=262.5 kN D C 20 kN/m RCy=97.5 kN 12 RAx=22.5 kN A F RFx=22.5 kN RAy=187.5 kN 6 6 12 22 Il calcolo dello sforzo normale non presenta particolari difficoltà, essendo costante per i vari tratti. E N 262.5 kN B D C F A 187.5 kN 97.5 kN Taglio (i vari sistemi di riferimento locale sono indicati in figura): ⇒ TA = RAx = 22.5 kN TB = 262.5 kN TzAB = –RAx – pz ED ⇒ TE = 0 TB = 240 kN Tz =– pz Si noti infine che nel diagramma del taglio del tratto BC, la discontinuità corrisponde al valore della forza concentrata P. E T z 187.5 kN 97.5 kN 262.5 kN B D C z 22.5 kN F 22.5 kN A 240 Equilibrio nodo D 240 kN 262.5 97.5 D 97.5 22.5 23 Momento (i vari sistemi di riferimento locale sono gli stessi del taglio; le fibre tese positive sono all’intradosso): MA = 0 MB = 1710 kNm MzAB = –RAxz – pz2/2 ⇒ ⇒ ME = 0 MB = 1440 kNm MzED =– pz2/2 Si noti che il carico concentrato produce una discontinuità nella pendenza del diagramma. E M 585 kNm 1710 kNm 1440 kNm D B C 270 kNm 1170 kNm A F 1440 1170 Equilibrio nodo D D 270 ESERCIZIO 3 Determinare le reazioni vincolari esterne ed interne. Disegnare i diagrammi delle caratteristiche della sollecitazione indicando i valori significativi E 2L p p B D C L=2 m 2L p=40 kN/m A L L 24 SOLUZIONE Riepilogo Reazioni Vincolari L=2 m p=40 kN/m REy = pL/2 = 40 kN L p C E RCy = pL/2 = 40 kN B 2L 2L p A RAx = 2pL = 160 C D RCy = pL/2 = 40 kN 2 MA = 5pL /2 = 400 kNm L RAy = pL/2 = 40 kN Diagrammi 40 kN E E T N 40 kN 40 kN B C D B D 40 kN C E A A 160 kN M 80 kNm B 400 kNm C 20 kN D A 25 ESERCIZIO 4 Per la struttura rappresentata in Fig. 1 si richiede di: 1. calcolare il valore delle reazioni vincolari; 2. determinare le leggi di variazione e i diagrammi delle caratteristiche della sollecitazione. p E D L p p A B L C L L L=2 m p=40 kN/m Fig. 1 Riepilogo reazioni vincolari L=2 m p=40 kN/m p 240 kN 240 kN p2L/2=80 kN E D p2L/2=80 p2L/2=80 kN D 240 kN 2L L p A B L L 240 kN C 240 kN 240 kN 80 kN E D N 240 kN A B C 26 80 kN E D T 80 kN 240 kN 240 kN A B 160 kN 80 kN C E D 80 kNm M 80 kNm A B 480 kNm C 400 kNm 27
Scaricare