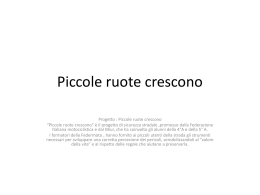
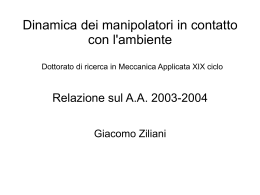
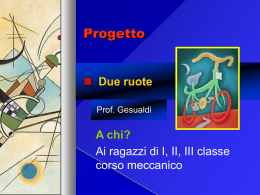
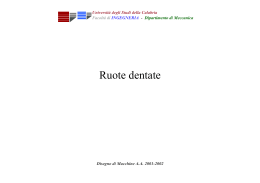
16 Sistemi semi-deniti Sistema ad ingranaggi Consideriamo il sistema di gura 1.11 costituito da due volani, collegati tra loro da un ingranaggio di inerzia trascurabile. Per ciascuno dei due volani possiamo esplicitare l'equazione: I θ̈ = −Me = −kψ dove Me è la coppia elastica, k la rigidezza e ψ l'angolo di torsione, denito come la dierenza tra la rotazione del volano θ e quella della ruota dentata all'estremità opposta θR . Otteniamo così, per ciascun albero, le seguenti equazioni: I1 θ̈1 = −Me1 = −k1 ψ1 = −k1 (θ1 − θR1 ) I2 θ̈2 = −Me2 = −k2 ψ2 = −k2 (θ2 − θR2 ) (1.48) Isoliamo ora le accelerazioni nella seguente maniera: τ k1 (θ1 − θR1 ) I1 k2 θ̈2 = − (θ2 − θR2 ) I2 τ θ̈1 = − (1.49) (1.50) Sottraendo la (1.48) dalla (1.47) si ottiene: τ θ̈1 − θ̈2 = − τ k1 k2 (θ1 − θR1 ) + (θ2 − θR2 ) I1 I2 (1.51) Gli angoli di rotazione delle ruote dentate sono legati tra di loro dal rapporto di trasmissione di ingranaggio: τ= R1 θR2 =− θR1 R2 (1.52) dove il segno negativo tiene conto del fatto che le ruote dentate girano in senso opposto. Esplicitiamo inoltre le condizioni di equilibrio dell'ingra- Figura 1.11: Sistema torsionale con ingranaggio. Vibrazioni libere dei sistemi ad un grado di libertà 17 Figura 1.12: Azione e reazione scambiate tra la coppia di ruote dentate. naggio, così come mostrato nella gura 1.12. Per il principio di azione e reazione, la forza tangenziale applicata alle ruote è uguale e contraria, questa forza genera un momento rispetto al centro di rotazione che deve essere equilibrato dal momento elastico dell'albero, quindi: Me1 = R1 T Me2 = R2 T (1.53) Isolando T e ricordando le espressioni dei momenti elastici (1.46) otteniamo: k1 (θ1 − θR1 ) k2 (θ2 − θR2 ) = R1 R2 (1.54) e introducendo l'espressione del rapporto di trasmissione (1.50): k1 (θ1 − θR1 ) = −τ k2 (θ2 − τ θR1 ) (1.55) da cui è facile isolare θR1 : θR1 = k1 θ1 + τ k2 θ2 k1 + τ 2 k2 (1.56) otteniamo quindi: τ k2 (τ θ1 − θ2 ) k1 + τ 2 k2 k1 (τ θ1 − θ2 ) =− k1 + τ 2 k2 θ1 − θR1 = (1.57) θ2 − θR2 (1.58) Sostituendo le relazioni appena trovate nell'equazione dierenziale (1.49) e operando il cambio di variabile α = τ θ1 − θ2 si ottiene: α̈ + τ 2 k1 k2 I1 + τ 2 I2 α=0 k1 + k2 τ 2 τ 2 I1 I2 (1.59) 18 Sistemi semi-deniti Figura 1.13: Sistema torsionale equivalente. Figura 1.14: Sistema lineare equivalente con spostamenti lineari. che corrisponde all'equazione di un sistema vibrante ad un solo grado di libertà, la cui pulsazione naturale risulta: s ωn = τ 2 k1 k2 I1 + τ 2 I2 k1 + τ 2 k2 τ 2 I1 I2 (1.60) Ricordando la pulsazione naturale (1.45) dell'esempio precedente, osserviamo che il sistema in esame può essere ridotto al sistema equivalente mostrato nella gura 1.13 semplicemente moltiplicando la rigidezza e l'inerzia dell'albero secondario per il quadrato del rapporto di trasmissione: k2∗ = τ 2 k2 I2∗ = τ 2 I2 (1.61) La rigidezza torsionale dell'albero si ottiene componendo in serie le rigidezze k1 e k2∗ , ovvero: k= τ 2 k1 k2 k1 + τ 2 k2 (1.62) Sostituendo la (1.60) nella (1.46) si ottiene immediatamente l'espressione (1.58). Un ulteriore sistema equivalente, ma con spostamenti lineari anziché angolari, è mostrato nella gura 1.14.
Scaricare