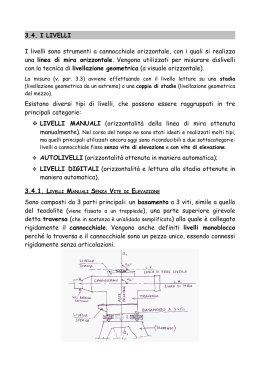
MISURA DIRETTA DEI DISLIVELLI L’operazione topografica che consente la misura diretta dei dislivelli è la livellazione geometrica. Conviene intanto precisare che in generale non è possibile ottenere la “quota” di un punto, dato che essa è pari al tratto di verticale compreso tra il punto della superficie terrestre e la superficie di riferimento (geoide). Si può quindi pensare di dare ad un punto il valore di quota nulla, derivando così da esso tutte le altre quote. LA + QA = QB + LB QB – QA = lA - lB ∆AB = QB - QB = lA - lB La misura diretta dei dislivelli viene realizzata rigorosamente con una livellazione idrostatica, nella quale le letture in corrispondenza del liquido in A e B sono letture su una superficie equipotenziale parallela al geoide, in quanto i punti A e B sono vicini. In questi termini l’espressione del dislivello è ∆AB = lA - lB e l’operazione viene detta “battuta di livellazione” 1 Il collegamento altimetrico di una serie di punti sulla superficie terrestre avviene attraverso una linea di livellazione. Lo strumento che però viene utilizzato è generalmente il livello a cannocchiale . Molto schematicamente si può dire che il livello è uno strumento il cui asse di collimazione può essere facilmente reso orizzontale. Se il livello è posto esattamente al centro tra le due stadie l’errore dovuto alla curvatura terrestre è uguale sia in A che in B, così come l’errore residuo di collimazione. Il mareografo Questo strumento determina il punto di quota nulla cui riferire le quote di livellazione. E’ costituito da un grosso cilindro cavo che viene infisso nel bacino di un porto, al suo interno è contenuto un galleggiante collegato ad un trasduttore che ne registra la posizione in continuo. Dividendo l’area totale del grafico per l’intervallo di tempo in cui è stata ottenuta si può ottenere la quota media di zero del mare, e quindi del geoide in quel punto. 2 La quota nulla fornita dal mareografo viene collegata ad un caposaldo che diventa così il punto di derivazione locale delle quote. Utilizzazione della livellazione geometrica Come vedremo la livellazione geometrica è il metodo più preciso per ottenere un dislivello, infatti l’incertezza con cui si opera varia da 0.01 mm a 1 mm. Essa viene impiegata per determinare quote di punti fondamentali distribuiti su tutto il territorio nazionale, per poi derivare da questi punti le quote di altri. Opere d’ingegneria civile come strade, acquedotti, fognature, linee ferroviarie non possono prescindere dai dati che una livellazione geometrica può fornire. Anche per il collaudo di manufatti può essere impiegata con notevole successo, in quanto fornisce gli abbassamenti con costi relativamente bassi. I punti da cui si derivano le quote sono chiamati capisaldi, e sono costituiti da piastre di ferro ancorate in parti del territorio ritenute stabili. I capisaldi sono di tipo verticale o orizzontali, nel primo caso sono disposti in prossimità di un marciapiede, di una spalletta e realizzati all’interno di protezioni che li difendono dagli agenti atmosferici ovvero da urti, nel secondo caso sono fissati nelle parti di strutture stabili. In entrambi i casi nel caposaldo è indicata la quota da cui derivare le altre. Per una operazione come quella indicata in figura il dislivello ∆AD sarà dato da: 3 ∆AD = ∆AB + ∆BC + ∆CD dove ∆AB = lA - lB ∆BC = lB - lC ∆CD = lC - lD Potremo scrivere che in generale ∆ia = i – a dove - i sta per battuta indietro - a sta per battuta avanti e per n dislivelli sarà: ∆tot = ∑nk=1 (ik – ak) = ∑nk=1 ik – ∑nk=1 ak utilizzando , così, la somma finale delle battute indietro e delle battute avanti. Costituzione di un livello Lo schema strutturale di un livello è costituito da: - Basamento su tre viti calanti collegato a terra attraverso il treppiede - Cannocchiale - Livella torica (che non è detto stia sul cannocchiale) - Eventuale vite di elevazione. 4 La condizione di rettifica è che a bolla centrata, l’asse di collimazione sia parallelo alla tangente centrale della livella. La presenza o meno della vite di elevazione modifica la messa in stazione dello strumento e le modalità d’uso. Infatti se è presente la vite d’elevazione si procede nel modo seguente: - Si centra con le viti calanti la bolla della livella sferica, si rivolge il cannocchiale verso la stadia da leggere, e con la vite di elevazione si centra la bolla della livella torica, Se il cannocchiale cambia direzione essendo presente l’errore di verticalità, la bolla della livella torica va fuori centro ed occorrerà operare nuovamente con la vite di elevazione. - Viceversa senza la vite di elevazione, una volta centrata la bolla della livella torica si può ruotare il cannocchiale e leggere senza risentire di errori di verticalità residui. Considerato che l’orizzontalità dell’asse di collimazione è fondamentale per l’operazione di livellazione geometrica, si è sviluppata una classe di strumenti detti “Autolivelli” in cui un meccanismo interno consente di avere l’asse di collimazione orizzontale, una volta che nel basamento è stata centrata la livella sferica. Di questi strumenti parleremo più dettagliatamente in seguito. Le caratteristiche principali di un livello sono: a) l’ingrandimento del cannocchiale b) il diametro dell’obbiettivo c) la sensibilità della livella torica. Illustriamoli punto per punto: L’ingrandimento di un cannocchiale varia da 10 ÷ 60. Se consideriamo che a 50 m di distanza un millimetro si vede sotto un angolo α il cui valore è: 1 α = ---------- x 206265” ∼ 4” 50000 molto al di sotto del potere separatore dell’occhio (60” ÷ 90”). 5 - con un ingrandimento di 15 avrò: α = 15⋅ 4” = 60” ∼ 1’ il che significa che se non posso leggere il millimetro lo potrò stimare. - con un ingrandimento di 50 avrò α = 4”⋅ 50 = 200” il che significa che il millimetro lo potrò leggerlo. In tutto ciò gioca un ruolo notevole il diametro dell’obbiettivo che consente di restituire l’immagine con una risoluzione adeguata alla lettura. Per quanto attiene la precisione della livella, se S” è la sua sensibilità lo s.q.m. vale: σ (e) = 0.1 √S” che è proprio l’incertezza con cui si posiziona il cannocchiale rispetto all’orizzontale. Le letture alla stadia possono essere o a stima, ovvero di tipo micrometrico, nel primo caso si può stimare un decimo della grandezza (∼ 1 mm) nel secondo si può leggere il 0.1 mm e stimare 0.01 mm. Le stadie utilizzate sono di due tipi: - per livellazione tecniche si utilizzano stadie in legno di ml. 3.00 (allungabili a 4.00 ml) con graduazione centimetrata; la stadia è ripiegabile. - Per livellazioni di alta precisione si usano stadie in legno su cui è fissato un nastro Invar, in genere la graduazione e in 0.5 centimetri, e non sono ripiegabili. 6 Errore dovuto all’inclinazione della stadia v2 v2 l = l’ cos v = l’ [ 1 – ----- …..] = l’ (1 - -----) 2 2 l − l' = − v2 2 ⇒ l '- l = v2 2 Se la stadia è munita di livella sferica con v = 10’ si ha: 10 x 60 1 (l - l’) = l’ [---------- ]2 ⋅ ---- = l’ ⋅ 4,23 ⋅ 10-6 206265 2 si ha con l’ = 3 m (l – l’) = 3000 ⋅ 4,23 ⋅ 10-6 = 0.01 mm Quindi il valore è contenuto entro la minima incertezza di misura. Classificazione dei livelli Il livello è classificato in funzione dello scarto quadratico medio Kilometrico (S.q.m./km) vale a dire l’errore commesso su un kilometro di linea livellata. Una classificazione abbastanza valida ancora oggi può essere: 7 S.q.m./k S” D I Bassa precisione 10 mm 30”÷60” 20÷30 mm 15÷20 Media precisione 5 mm 40” 30 mm 20÷25 Alta precisione 1÷2 mm 10”÷25” 35÷40 mm 30 Altissima precisione 0.5 mm 5”÷10” 50÷60 mm 40÷50 Principi di funzionamento dell’autolivello Questi strumenti hanno la prerogativa di realizzare automaticamente l’orizzontalità dell’asse di collimazione, infatti non appena viene centrata la bolla della livella sferica entra in funzione il compensatore che fa assumere all’asse di collimazione la direzione orizzontale. I fondamenti dell’orizzontamento automatico sono i seguenti: a) Compensatore meccanico Sia OR l’asse di collimazione che in posizione corretta riporta l’immagine di P (∞) in R. Sia R’ la posizione del reticolo corrispondente ad una rotazione α dell’asse di collimazione in O, se in C esiste un sistema a bracci che ruotando di β porta R’ in R, l’orizzontalità dell’asse è mantenuta. b) Compensatore Ottico In questo caso è uno specchio posto in C che per una rotazione α in O fa ruotare il raggio di β riportandolo in R. 8 Per entrambi i compensatori, lo schema geometrico fornisce m l ------------ = ------------sen (β - α) sen α l m = sen (β - α) ⋅ -------sen α e ancora α β - α = m ⋅ --------l m+l β = ---------- ⋅ α l Gli elementi che costituiscono un compensatore sono tre: 1) Il sistema fisso di rinvio dei raggi ottici m+l 2) Il sistema mobile (in genere pendolare) che deve rispettare la β = --------- ⋅ α l 3) Lo smorzatore delle oscillazioni che può essere ad aria o magnetico Modalità di esecuzione di una livellazione geometrica Una livellazione geometrica può essere eseguita: 1) dal mezzo 2) in modo reciproco 3) da un estremo Il primo metodo è il migliore in quanto elimina: 9 - errore residuo di orizzontalità dell’asse di collimazione - S2 errore dovuto alla curvatura terrestre ( ------) 2R Dallo schema si ha semplicemente ∆AB = lA - lB dove in lA ed lB sono contenuti gli errori suddetti con segno opposto Precisione conseguibile nella livellazione dal mezzo Considerando la relazione ∆AB = lA - lB si ha che σ∆ = √2 ⋅ σB dove con σB si è indicato l’errore commesso nella lettura alla stadia. Il σB dipende da due parametri che sono: - errore residuo di verticalità σC - errore di lettura σl Potremo quindi scrivere 10 σB2 = σC2 + σl2 Analizziamo di seguito i due errori: L’errore residuo di verticalità dipende dall’incertezza di centramento della bolla nella livella, ovvero dall’incertezza del compensatore, se in generale chiamiamo con ν” questa incertezza avremo: v” ν” σC = ------------ x d 206265 Riferendoci all’incertezza di centramento di una livella con una sensibilità S pari a 25” avremo ν” = 0.1 √ 25 = 0.5” che su una battuta di 50 m determina σc = 0. 5 ⋅ 50000 = 0.12mm 206265 L’errore di lettura sappiamo che sperimentalmente è stato determinato come σ c = 2a u⋅D (mm) I dove - D è la distanza espressa in metri - u è l’unita di stadia espressa in millimetri - I - a è una costante pari a circa 0.06 è l’ingrandimento del cannocchiale Pertanto se ci riferiamo ad una battuta di 50 m con una stadia per livellazione tecnica dove u = 10 mm, con un cannocchiale di 30 ingrandimenti, avremo: 11 σ c = 2 ⋅ 0.06 10 ⋅ 50 = 0.48mm 30 in definitiva risulta σ B = 0.12 2 + 0.48 2 = 0.5mm I valori numerici indicati sono ovviamente funzione delle incertezze sia della lettura sia dell’errore residuo di verticalità, è comunque possibile e utile dare un’indicazione delle incertezze del σB, come segue: - livelli di bassa precisione σB = 1 ÷ 2 mm - livelli di media precisione σB = 0.5 ÷ 1 mm - livelli di alta precisione σB = 0.2 ÷ 1 mm - livelli di altissima precisione σB = 0.1 mm Volendo passare allo s.q.m./km basterà riferirsi ad una battuta media di 50 m, il che comporta: - livelli di bassa precisione s.q.m./km = (1÷2) ⋅ √n = (1÷2) ⋅ √20 = 5 ÷ 10 cm - livelli di media precisione s.q.m./km = 2.5 ÷ 5 cm - livelli di alta precisione s.q.m./km = 1 ÷ 1.5 mm - livelli di altissima precisione s.q.m./km = 0.5 ÷ 1 mm La livellazione reciproca Nel caso in cui non sia possibile effettuare la livellazione dal mezzo, volendo mantenere la stessa precisione, si ricorre alla livellazione reciproca, che consiste in due misure di dislivello con stazioni in posizioni simmetriche rispetto alle stadie. 12 Stazione in N ∆ AB = (l1 − ε ⋅ d ) − (l 2 − ε ⋅ D ) = l1 − l 2 + ε ⋅ D − ε ⋅ d = (l1 − l 2 ) + ε ⋅ ( D − d ) Stazione in M ∆AB = (l3 – ε⋅ D) – (l4 – ε⋅d) = l3 – l4 – ε⋅D + ε⋅d =(l3-l4)-ε(D-d) Da cui si ha sommando: ( l1 – l2 )+ (l3 – l4) ∆AB = -------------------2 e sottraendo si ottiene: 2ε ⋅ ( D − d ) = (l 3 − l 4 ) − (l 1 − l 2 ) da cui (l3 – l4) – (l1 – l2 ) ε = ----------------------2 (D – d) Pertanto con la livellazione reciproca è possibile ottenere il dislivello corretto e l’errore residuo dell’asse di collimazione. In effetti bisogna considerare che non è sempre possibile posizionare il livello in posizione esattamente reciproca, pertanto con riferimento alla figura si avrà: 13 Stazione in N ∆AB = (l1 – ε⋅d1) – (l2 – ε⋅d2) = l1 – l2 - ε(d1 – d2) Stazione in M ∆AB = (l3 – ε⋅d3) – (l4 – ε⋅d4) = l3 – l4 - ε(d3 – d4) Da cui sottraendo si ha: (l1 – l2) – (l3 – l4) - ε(d1 - d2) + ε(d3 - d-4 ) = φ e ancora [(l1 – l2) - (l3 – l4)] = ε[(d1 – d2) - (d3 – d4)] da cui (l1 – l2) – (l3 – l4) ε = ----------------------(d1 – d2)-(d3 – d4) Ottenendo ε sarà possibile calcolare il dislivello corretto. 14 Rettifica del livello Con riferimento alla figura si procede come segue: 1) Si esegue una livellazione dal mezzo con lo strumento in M, curando che AM ≈ MB, e si determina il dislivello corretto ∆AB = lA – lB 2) Si pone lo strumento in N, si esegue la livellazione determinando ∆*AB = l3 – l4 ≠ ∆AB ∆AB = (l3 – ∈⋅d) – (l4 - ∈⋅D)= l3 – l4 - ∈(d - D) = ∆*AB - ∈ (d- D) Sarà così: ∆AB = ∆*AB - ε(D - d) da cui ε= ∆ AB − ∆*AB D−d Ottenendo ε si possono calcolare le correzioni da apportare alle letture l3 ed l4 mediante: 1) La vite del reticolo, mantenendo centrata la livella. 2) La vite di elevazione 15 Un metodo ancora più semplice per rettificare il livello è il seguente: 1) Si determina il dislivello corretto ∆AB con una livellazione dal mezzo. 2) Si pone lo strumento a distanza d1 (minima distanza di focamento) da A e a distanza d2 da B Così facendo sulla lettura in A non si ha praticamente errore, mentre sulla lettura in B si ha il massimo errore. Si ha così: ∆AB(corretto) = lA(corretto) – lB(corretto) lB(corretto) = ∆AB(corretto) – lA(corretto) 16 Esempio n.1 ∈ = 4.84 ⋅ 10-5 (rad.) se a distanza d1 = 20 m si legge l1 = 1542 che lettura dovremo imporre per eliminare il difetto ∈ ? δ = 4.84 ⋅ 10-5 ⋅ 20000 = 0.97 mm ∼ 1 mm La lettura da imporre sarà 1541. Esempio n.2 Con livellazione geometrica dal mezzo si ha: ∆AB = 1.234 m Si è posto poi lo strumento in un punto distante d = 10 m dalla prima stadia e D = 40 m dalla seconda, in questo caso risulta ∆AB = 1.230 m ε= ∆ − ∆* 4mm = = 1.333 ⋅ 10 − 4 D − d 30000 Pertanto a 40 m dovremo leggere: l(corretto) = l* - 40000 ⋅ 1.333 ⋅10-4 = l* - 5.332 (mm) 17 Livellazione da un estremo l S ∆AB ∆AB = S - l Questo tipo di livellazione è la meno precisa tra le geometriche, in quanto sulla misura dell’altezza strumentale S si commette 1 ÷ 2 mm di errore. 18 La misura indiretta dei dislivelli Livellazione trigonometrica Con la misura delle distanze zenitali in A e B e la conoscenza di d è possibile ottenere il dislivello ∆AB, rispetto alla superficie della sfera locale di raggio R = √ρN. La denominazione “trigonometrica” deriva dal fatto che questa livellazione è impiegata per determinare il dislivello tra i trigonometrici delle reti d’inquadramento. Applicando il teorema di Nepero al triangolo AOB si ha: ) ) OB − OA tg 12 [ A − B] tg 12 [π − Z AB − π + Z BA ] = ) ) = OB + OA tg 12 [ A + B ] tg 12 [π − ω ] R + QB − R − QA tg 12 [ Z BA − Z AB ] tg 1 2 [ Z BA − Z AB ] = = R + QB + R + QA tg[π / 2 − ω / 2] ctgω / 2 e ancora: QB – QA ----------------------- = tg ½ [ZBA – ZAB] ⋅ tg ω/2 QB + QA + 2R 19 Se sviluppiamo tg ω/2 in serie avremo: ω2 tg ω/2 = tg φ + ω/2 [ 1 + ----- ………] 12 che con ω = d/R diventa d d2 tg ω/2 = ------ [1 + ------- ………] 2R 12 R2 considerato che per d = 30 km si ha: d2 900 ------ = --------------- = 2 ⋅ 10-6 12 R2 12 ⋅ 36 ⋅ 106 si può scrivere QB – QA ----------------------- = tg ½ [ZBA – ZAB] ⋅ ω/2 QB + QA + 2R ∆AB d ----------------------- = tg ½ [ZBA – ZAB] ⋅ ----QB + QA + 2R 2R ∆AB = (QB + QA + 2R) tg ½ (ZBA – ZAB) ⋅ d/2R Qm ∆AB = (--------- + 1) tg ½ (ZBA – ZAB) ⋅ d R Qm ∆AB = d ⋅ tg ½ (ZBA – ZAB) + ------- ⋅ d ⋅ tg ½ (ZBA – ZAB) R Commentando la formula si può dire che c’è una parte principale del dislivello e una correzione che è Qm/R volte più piccola. Considerato che il valore di Qm non è noto si può porre per esso un primo valore approssimato (al limite Qm = QA) ricavare un primo valore del dislivello e calcolare così per iterazione QB. Se si chiama con t l’errore su Qm, l’errore q su ∆ sarà: 20 t q = ----- ⋅ (QB - QA) R se poniamo q = 1 cm; (Q*A - QA)max = 2 km avremo t 10-2 = --------- ⋅ 2 ⋅ 103 6⋅106 da cui t 10-2 = --------3⋅103 tmax = 30 m E’ opportuno precisare che il valore di d deve essere noto e non può dedursi dalla somma delle zenitali ZAB + ZBA = π + ω d =ω⋅R In quanto lo s.q.m. su distanze zenitali di questo tipo è circa 3”, con la conseguenza che la distanza verrebbe dedotta con almeno 4” di incertezza e quindi: 4” σd(ω) = R ⋅ ----------- = ∼ 120 m 206265 valore troppo elevato. Livellazione con una sola zenitale Tenendo conto che ZAB + ZBA = π + ω ZBA = π + ω - ZAB si ha: tg ½ (ZBA – ZAB) = tg ½ (π + ω - 2 ⋅ZAB) = tg [π/2 – (ZAB - ω/2)] = ctg (ZAB - ω/2) 21 il dislivello pertanto vale: Qm d ∆AB = QB - QA = d (1 + ------) ⋅ ctg (ZAB – -------) R 2R La rifrazione atmosferica La densità dell’aria diminuisce all’aumentare della quota e con essa diminuisce l’indice di rifrazione. Ciò comporta che le traiettorie dei raggi luminosi s’incurvano con concavità verso la terra, infatti uscendo da A un raggio luminoso, muovendosi in strati la cui densità decresce, si allontana dalla normale progressivamente. Ne consegue che in luogo della misura di ZAB si effettua ζAB e in B si legge ζBA in luogo di ZBA, essendo εA = ZAB - ζAB - = KA ⋅ ω/2 angoli di rifrazione εB = ZBA - ζBA = KB ⋅ ω/2 KA e KB sono coefficienti di rifrazione K è tabellato in funzione della frazione del semiarco diurno 22 Semiarco diurno = p.es. tramonto − alba 2 T.S. = 19.39 (tramonto del sole) S.S. = 4.37 (sorgere del sole) S.d. = 19.39 − 4.37 = 7 h 32 2 La frazione corrispondente alle ore 10h,30 si ha per S(10.30) = 12 h ,10 m − 10 h ,30 m 1h 40 m = h m = 0.22 7.32 7 32 0.14 0.8 0.7 0.5 diurno pomeridiano Il valore del coefficiente di rifrazione medio può essere desunto dalla relazione ZBA + ZAB = π + ω = π + d/R Sostituendo le zenitali apparenti avremo ζBA + ∈B + ζAB + ∈A = π + ω ζBA + KB ⋅(ω/2) + ζAB + KA ⋅ (ω/2) = π + ω ζBA + ζAB + KA + KB ⋅ω = π + ω 2 Km ⋅ ω = π - (ζBA + ζAB ) + ω 23 Km = 1 - ς BA + ς AB − π ω Si ha così: Qm ω QB – QA = d (1+ -----) ⋅ tg ½ [ζBA - ζAB + ------ (KB – KA)] R 2 Potendosi ritenere che KB ≈ KA la formula diventa Qm QB – QA = d (1+ -----) ⋅ tg ½ (ζBA - ζAB ) R L’effetto della rifrazione va tenuto in conto nelle misure con una sola zenitale, infatti essendo ∆ AB = d (1 + considerato che sarà ZAB= ξAB + εA e trascurando Qm ≅φ R Qm d ) ⋅ ctg[ Z AB − ] R 2R avremo: ∆ AB = d ⋅ ctg [ξ AB + ε A − εA = K ⋅ dove ∆ AB = d ⋅ ctg [ξ AB + ω 2 =K⋅ d ] 2R d 2R pertanto Kd d 1− K − ] = d ctg [ξ AB − ⋅ d] 2R 2R 2R Sviluppando in serie la cotangente avremo: ∆ AB = d ⋅ ctg ξ AB + Avendo considerato sen2 ξAB ≅ 1. 24 1− K 2 ⋅d 2R Problema del faro 1-k QB – QA = d ⋅ ctg ζAB + ------- ⋅ d2 2R 1-k QB = ------- ⋅ d2 2R d= 2 ⋅ R ⋅ QB 1− k Precisione della livellazione trigonometrica Prenderemo in esame la misura effettuata con una sola zenitale, in essa il dislivello ha la seguente funzione: ∆ = ƒ (d, ξ, K) pertanto 2 2 2 ϑf ϑf ϑf 2 σ = ⋅ σ a2 + ⋅ σ ξ2 + ⋅σ k ϑd ϑK ϑξ 2 ∆ Prendiamo in esame i singoli termini: 1) ϑf 1− K = ±[ctgξ + ⋅ d ]⋅σ d ϑd R 25 Se consideriamo σd d = 10 km d = 10 −5 ξ =80° K=0.14 R=6380000 m avremo σ ∆ ( d ) = ±[0.17 + 2) 1 − 0.14 ⋅ 10 4 ] ⋅ 0.10 ≅ ±1.7cm 6.38 ⋅ 10 6 ϑf 1 ⋅ σ ξ = ±d ⋅ ⋅σ ξ ϑξ sen 2ξ che con σξ = ± 2” fornisce σ ∆ (ξ ) = 10000 ⋅ 3) 2 1 ⋅ = ±10cm 206265 0.97 ϑf d2 ⋅σ K = ± ⋅σ K ϑK 2R che con σK = ± 0.01 diventa σ ∆( K ) = ± 10 8 ⋅ 0.01 = ±8cm 2 ⋅ 6 ⋅ 10 6 26 Livellazione Tacheometrica ∆AB = D ctg Z + h – l Con evidente riferimento alo schema geometrico Precisione: ∆AB = f (D, Z, h, l) pertanto σ ∆2 = [ ϑf 2 2 ϑf 2 2 ϑf ϑf ] ⋅ σ D + [ ] ⋅ σ z + [ ] ⋅ σ h2 + [ ] ⋅ σ l2 ϑD ϑZ ϑh ϑl σ ∆2 = (cot g .z ) 2 ⋅ σ D2 + ( D 2 2 ) ⋅ σ z + σ h2 + σ l2 2 sen z con D, Z, h, l indipendenti 1) σ∆(D) = ± cotg z ⋅ σD avremo 2) σ∆(Z) = ± con z = 80° e σ∆(D) = ± 0.17 ⋅ 10 cm = 1.7 cm D ⋅ σZ sen 2 z con σz = 1’ risulta 27 σD D = 10-3 D= 100 m σ ∆( z) = ± 3) σh = ± 2 mm 100 60" ⋅ = ±3cm 0.969 206265" σl = ± 1 mm in definitiva σ ∆ = ± 1.7 2 + 3 2 + 0.2 2 + 0.12 = ±3.45cm 28 Quote ortometriche e quote dinamiche Nel definire un dislivello ci siamo riferiti alla differenza di quota ortometrica esistente tra due punti, intendendo per ortometrica il tratto di verticale che da un punto sulla terra arriva la geoide. Il problema si pone allorché si vuole estendere il concetto di dislivello a quello di differenza di energia potenziale, infatti in questo caso esiste una leggera divergenza tra il concetto di superficie ortometrica e superficie equipotenziale. Giova premettere che per gran parte dei problemi d’Ingegneria il ragionamento che andremo a fare ha poca importanza pratica, ma riveste comunque una valenza culturale di cui è giusto tenere conto. Infatti con riferimento alla figura se le S sono superfici ortometriche e le W sono superfici equipotenziali ( di livello), si nota che mentre il dislivello ortometrico è costante, quello riferito alle urve equipotenziali non lo è. Ciò dipende dal fatto che le superfici equipotenziali non essendo equigravitazionali non sono parallele. W2 h1 h2 S2 W1 S1 W0 Per esse vale la relazione dW = g1dh1 = g 2 dh2 ed essendo g1 ≠ g 2 sarà dh1 ≠ dh2 Si deduce inoltre che dh1 − dh2 g 2 − g1 ≠ dh1 g1 Vale a dire che la variazione relativa di distanza è pari a quella gravitazionale. Per avere ora un ordine di grandezza delle variazioni si pensi che nella penisola italiana la variazione gravitazionale tra le Alpi e la Sicilia è circa l’1 per mille, il che significa che due 29 superfici di livello 8equipotenziali) se in Sicilia distano 1000m al confine con la Francia disteranno 999m. Se si tiene conto che per una linea di livellazione lunga 2000 km, utilizzando uno s.q.m. kilometrico di ± 1mm si ha: σ = ±1 ⋅ 2000 =≈ 45mm ≅ 4.5cm Anche ammettendo che lo s.q.m. totale sia alla fine ± 3σ = 3 ⋅ 4,5 = 13,5cm Si comprende che la differenza di 100 cm, dovuta al modello non è sostenibile. Si comprende parimenti che per livellazioni di 20 ÷ 30 km il problema non si pone. Se si vuole arrivare ad una definizione corretta, facendo coincidere quote ortometriche con quote geopotenziali è necessario passare per il concetto di quota dinamica di un punto che è il lavoro compiuto dall’unità di massa per andare dal geoide a quel punto: Qd = F ⋅S m = ⋅ g ⋅ ∆h = g∆h m m Risulta così che la Qd non ha la dimensione di una lunghezza, ma piuttosto di una accelerazione per una lunghezza, pertanto per riportare l’unità di misura in termini ortometriche si deve dividere per g(980 gal). In effetti si divide per 1000, ottenendo così che le quote dinamiche e quindi geopotenziali sono inferiori alle ortometriche del 1%. In definitiva se si vuole il dislivello in termini di superfici equipotenziali, si avrà: QG 2 − QG1 = 1 ∑ g ⋅ ∆Q 1000 e ancora QG 2 − QG1 = ∑ ∆Q − 1 ∑ (1000 − g ) ⋅ ∆Q 1000 Che così scritta individua nel primo termine quello ortometrico mentre il secondo è la correzione dinamica. 30
Scaricare