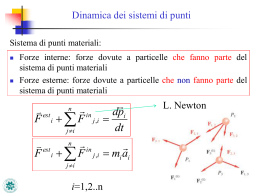
Meccanica 8 31 marzo 2011 Teorema del momento angolare. 2° eq. Cardinale Conservazione del momento angolare Sistema del centro di massa. Teoremi di Koenig Lavoro, energia cinetica, potenziale e meccanica per un corpo esteso Energia propria e interna Teorema del momento angolare • Abbiamo visto nel caso di un solo punto materiale, che, se il polo e` fisso e il sistema di riferimento e` inerziale, il teorema del momento angolare e` dLO O dt 2 Teorema del momento angolare • Generalizziamo questo teorema al caso di un sistema di piu` particelle e polo fisso • Deriviamo rispetto al tempo LO ri pi i • Otteniamo dpi dLO d dri ri pi mi vi ri dt dt i dt i dt i vi mi vi ri Fi 0 O i • Cioè di nuovo i dLO O dt 3 Teorema del momento angolare • Generalizziamo ora al caso di un sistema di piu` particelle e di un polo mobile • Deriviamo rispetto al tempo l’equazione che lega il MA calcolato rispetto ad un polo fisso O e un polo mobile Q LQ LO rQ P • Otteniamo dLQ dLO d drQ dP rQ P O P rQ dt dt dt dt dt O vQ P rQ F O rQ F vQ P 4 Teorema del momento angolare • Ricordando che l’espressione tra parentesi è il momento rispetto al polo mobile Q, otteniamo dLQ dt Q vQ P • Espressione che differisce per la presenza del secondo termine da quella trovata per il polo fisso • Ovviamente si ritrova quella equazione se anche Q è fisso: in tal caso il secondo termine è nullo 5 Teorema del momento angolare • Esistono però altri casi in cui le equazioni per il polo mobile e per il polo fisso sono uguali • Il caso più importante è quello in cui il polo coincide con il CM del sistema, in tal caso dLCM CM vCM P dt • E poiché vCM e P sono proporzionali, segue dLCM CM dt 6 Teorema del momento angolare • Un altro caso e` quando il polo coincide con il punto di contatto C tra una ruota che si muove (slittando o rotolando) e una superficie di appoggio dLC C vC P dt • Poiché vC e P sono paralleli, segue dLC C dt P C vC 7 Teorema del momento angolare • Abbiamo dimostrato il notevole teorema: la derivata del momento angolare è uguale al momento delle forze (esterne) se come polo usiamo – un punto fisso in un sistema inerziale – oppure il CM del sistema (indipendentemente dal fatto che questo sia fisso o sia mobile e qualunque sia il suo moto) dLCM dt CM 8 Seconda equazione della dinamica dei sistemi • Se il polo e` fisso o e` il CM dLQ dt QE • Questa e` la seconda equazione della dinamica dei sistemi • O seconda equazione cardinale della meccanica 9 Conservazione di L E dLO O O dt • Se vale l’equazione • e se il momento delle forze esterne e` nullo, allora il momento angolare si conserva E O 0 dLO 0 dt LO const. • Facciamo due osservazioni: – La conservazione puo` valere anche solo in alcune direzioni (quelle in cui la componente di e` nulla) – A seconda della situazione fisica, puo` annullarsi qualunque sia il polo, oppure solo per poli scelti opportunamente 10 Sistema di riferimento del CM • Ha origine nel CM • Gli assi sono sempre paralleli agli assi di un sistema inerziale • In generale non e` inerziale pi • La posizione di un punto nel * ri ri rCM SCM e` • Derivando questa relazione troviamo la velocita` di un * v punto nel SCM i vi vCM CM r i * Ai ri O rCM 11 Sistema di riferimento del CM • La posizione e la velocita` del CM nel SCM sono, ovviamente, * rCM rCM rCM 0 * vCM vCM vCM 0 • Ricordando la definizione di CM, valida in ogni SdR, abbiamo anche * * m r M r ii CM 0 i * * m v M v ii CM 0 i • La seconda equazione stabilisce che la QM totale del sistema e` nulla se misurata nel * * SCM P MvCM 0 12 Teoremi di Koenig • 1o teorema: fornisce una relazione tra il valore del momento angolare in un sistema inerziale e nel sistema del CM • 2o teorema: fornisce una relazione tra il valore dell’energia cinetica in un sistema inerziale e nel sistema del CM 13 1o teorema di Koenig • Confrontiamo il MA calcolato – nel SCM con polo nel CM – nel SdR inerziale con polo nell’origine O pi CM r i * Ai ri O * * * LCM ri mi vi ri rCM mi vi vCM i rCM i ri mi vi rCM mi vi ri mi vCM rCM mi vCM i i i i LO rCM mi vi mi ri vCM rCM MvCM i i 14 1o teorema di Koenig • Il 2o e 4o termine sono uguali e opposti; il 3o termine e` il MA del CM nel SdR inerziale * LCM LO MrCM vCM LO rCM MvCM LO LO CM • La relazione puo` essere letta anche * LO LO CM LCM • Il MA di un corpo in un SdR inerziale e` uguale al MA del sistema rispetto al CM, calcolato nel SCM piu` il MA del CM nel sistema inerziale 15 2o teorema di Koenig • Calcoliamo ora l’energia cinetica 2 1 *2 1 * K mi vi mi vi vCM i 2 i 2 1 2 1 2 mi vi mi vi vCM mi vCM i 2 i i 2 1 2 K mi vi vCM mi vCM 2 i i 1 2 1 2 K MvCM vCM MvCM K MvCM 2 2 16 2o teorema di Koenig • il 2o termine e` l’energia cinetica del CM nel SdR inerziale K * K K CM • La relazione puo` essere letta anche K K CM K * • L’energia cinetica di un corpo in un SdR inerziale e` uguale all’ EC del sistema calcolata nel SCM, piu` l’EC del CM nel sistema inerziale 17 Lavoro • Calcoliamo il lavoro relativo allo spostamento di un sistema di punti materiali • Per una particella il lavoro infinitesimo e` E I dWi Fi dri Fi dri Fi dri dWi I dWi E • Il lavoro finito si trova integrando il lavoro infinitesimo tra stato iniziale e finale (che possono essere diversi per ogni particella) Bi Bi Bi Ai Ai Ai Wi dWi dWi I dWi E Wi I Wi E 18 Lavoro • Per il sistema il lavoro si trova sommando su tutte le particelle W Wi Wi I Wi E W I W E i i i • A differenza del caso della risultante dei momenti di forza agenti sul sistema, ora le forze interne danno un contributo non nullo 19 Lavoro • Raggruppando infatti le forze interne a coppie di forze coniugate secondo il 3o principio, il lavoro interno e` esprimibile come r r I I I I W Wi Fi dri f ij dri Fi iF iF i riI i riF i riI j i r jF Ii I I f ij dri f ji drj i j i r r rijI r r r I I I f ij dri f ij drj f ij drij 0 i j i r r i j i r iI jI iF jF iI jI rijF Fj ijF ijI Ij 20 Lavoro • Ove si e` introdotta la nuova variabile rij • In generale il prodotto scalare che compare nell’integrando non e` nullo, ne’ sono nulli gli integrali o la loro somma • Il lavoro delle forze interne dipende in ultima analisi dal cambiamento delle distanze mutue drij tra le particelle che formano il corpo 21 Lavoro per un corpo rigido • In assenza di tali cambiamenti i lavori elementari sarebbero nulli, e altrettanto nulli sarebbero i lavori integrali e la somma dei lavori relativi alle diverse particelle • Questo e` il caso, particolarmente importante, di un corpo rigido: W I 0 nessun cambiamento delle distanze mutue tra le particelle che formano il corpo 22 Energia cinetica • Studiando il lavoro infinitesimo relativo a una particella singola, avevamo trovato l’equazione 1 2 dWi Fi dri mi vi dvi d mi vi dK i 2 • Integrando tra stato iniziale e finale Bi Bi Ai Ai Wi dWi dK i K i Bi K i Ai K i • e sommando su tutte le particelle W Wi Ki Ki K i i i 23 Energia cinetica • Ovvero: il lavoro complessivo delle forze che agiscono su un sistema e` uguale alla variazione di energia cinetica del sistema tra stato iniziale e finale Teorema dell’energia W K cinetica per corpo esteso • Inoltre il lavoro e` scomponibile nel lavoro delle forze esterne e interne, in generale entrambi diversi da zero W W I W E 24 Energia potenziale • Se le forze sono tutte conservative, il lavoro e` esprimibile in termini di energia potenziale dU i dWi • Integrando tra stato iniziale e finale U i Wi • E sommando su tutte le particelle U W W i i i i • Definendo l’energia potenziale totale U U i i • troviamo U W 25 Conservazione dell’energia meccanica • Il discorso si puo` ripetere separatamente per forze interne e esterne I I E E W U W U W W I W E U I U E U • Ricordando il teorema dell’energia cinetica, otteniamo K U • Abbiamo cosi’ ritrovato il teorema di conservazione dell’energia meccanica E per un corpo esteso K U E 0 26 Forze non conservative • Se sono presenti forze non conservative, possiamo estendere il ragionamento fatto per una singola particella W Wnc Wc • Ottenendo W K Wc U K W Wnc Wc Wnc U K U E Wnc • Cioe` la variazione di energia meccanica e` uguale al lavoro delle forze non conservative 27 Energia propria • Energia meccanica: E K U • Separando i contributi delle forze interne ed I E E K U U esterne • E non rappresenta una caratteristica del solo sistema, perche’ contiene anche le interazioni con l’ambiente • Per tener conto di questo, si definisce l’energia propria I Ep K U 28 Energia interna • Tenuto conto che l’energia cinetica dipende dal SdR, l’energia propria si puo` scrivere 1 2 1 2 I E p K MvCM U U MvCM 2 2 * • Avendo definito l’energia interna U K * U I • L’energia interna e` l’energia propria nel SdR del CM, ove assume il valore minimo 29
Scaricare