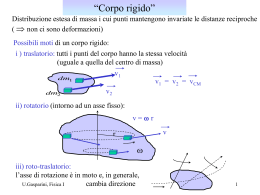
Lezione 8 Dinamica del corpo rigido Argomenti della lezione: • Corpo rigido • Centro di massa del corpo rigido • Punto di applicazione della forza peso • Punto di applicazione della forza peso • Momento della forza peso • Energia potenziale • Rotazione nel piano • Momento di interzia • Energia cinetica di rotazione • Teorema di Huyghens-Steiner Corpo rigido Definizione Un corpo rigido è un oggetto o meglio un sistema di punti materiali in cui le distanze relative NON cambiano Un corpo rigido diventa quindi la definizione di un oggetto reale esteso. Le forze interne (forze di coesione che mantengono invariate le distnze fra i punti) hanno le seguenti caratteristiche: NON hanno risultante NON fanno momento NON fanno lavoro R (I ) 0 M 0 (I ) W 0 (I ) Corpo rigido Tale sistema è quindi descritto dalle seguenti equazioni dinamiche Le forze esterne sono responsabili del moto del Centro di Massa I momenti delle forze esterne sono responsabili delle rotazioni intorno ad O (punto fisso o centro di massa del sistema) Il lavoro delle forze esterne varia l’energia cinetica del sistema R MO (e) (e) ma CM dL O d ri mi v i dt i dt W (e) A B Ecin, B Ecin, A Corpo rigido Come è fatto un corpo rigido?? Esso è formato da un insieme continuo di punti materiali. Estendendo quindi ciò che si è visto per un insieme discreto di punti materiali le singole masse saranno infinitesime, ossia mi dm Quindi tutte le somme diventano degli integrali! Centro di massa di un corpo rigido Definiamo il centro di massa di un sistema di punti materiali la seguente grandezza: mi ri rCM i y mi rCM dm mi i r ri O x Se definiamo la densità come: r dV rCM Volume rCM rdm dm con dV elemento di volume dm dV occupato da dm rdV rdV Volume Volume dV dV VolumeTotale Volume Volume Punto di applicazione della forza peso Centro di massa Consideriamo un corpo continuo sottoposto alla forza peso: dm gdm La risultante di tutte queste forze parallele fra di loro è: gdm g dm mg E tale forza è applicata nel centro di massa del sistema. Momento della forza peso Centro di massa Il momento della forza peso rispetto a un polo fisso (ad esempio l’origine dell’asse delle coordinate) è dato da: M r gdm ma: rCM rdm dm rdm g rdm r dm CM M rCM dm g mrCM g rCM mg Energia potenziale Centro di massa Analogamente a quanto visto in precedenza per il calcolo dell’energia potenziale: E p gzdm g zdm ma: zCM zdm dm zdm z dm CM E p gzdm g zdm gzCM dm mgzCM Se il corpo è libero ed agisce solo la forza peso la traiettoria del CM è verticale rettilinea o parabolica a seconda delle cond. iniz. Rotazione nel piano v Consideriamo un corpo di due dimensioni, che possa ruotare intorno ad un asse fisso uz dm r Le equazioni del moto del sistema sono O CM R ( e ) ma CM M O (e) Asse di riferimento LO dL O dt r m v r vdm i i i i Poichè rv LO rvdmu z Rotazione nel piano v uz dm r O Notiamo che il momento angolare e il momento della risultante delle forze esterne sono perpendicolari al piano e paralleli al versore uz Inoltre si ha che: CM d vr dt Asse di riferimento E quindi La quantità d d L O rvdm rr dm dt dt I O r 2 dm r 2 dm prende il nome di momento di inerzia Momento di inerzia Si è appena introdotta una nuova quantità che prende il nome di momento di inerzia 2 I O r dm Nel caso continuo ri 2 mi Nel caso discreto IO i Il momento di inerzia è legato a come è distribuita la massa attorno all’asse di rotazione Esempio Equazioni del moto del corpo rigido R Per la traslazione Per la rotazione MO M O (e) (e) (e) ma CM dL O dt d 2 L r dmu z O dt I O r 2 dm dL O d 2 2 I Ou z dt dt Calcolo dell’energia cinetica per la rotazione intorno ad un asse fisso v Sia m la massa totale del corpo rappresentato in figura uz dm Dal teorema di Konig si ha che r Ecin O CM Asse di riferimento Con v 'i 1 M tot v CM 2 2 i 1 mi v'i 2 2 velocità relative rispetto al CM Calcolo dell’energia cinetica per la rotazione intorno ad un asse fisso v uz Dall’analisi del moto di rotazione intorno ad O di tutte le masse infinitesime dm r O CM Ecin i Asse di riferimento Ma d vr dt e in definitiva Ecin 1 1 mi v'i 2 dmv'2 2 2 2 1 1 d 2 d dm r 2 2 dt dt I O r 2 dm Ecin 1 d IO 2 dt 2 2 r 2 dm Teorema di Huyghens-Steiner Prendiamo un corpo piano qualsiasi che ruota intorno al punto O rCM O Calcoliamo ora il momento d’inerzia rispetto al punto O CM r r' I O r dm IO r CM 2 2 r CM r' dm 2 r ' 2 2rCM r ' dm rCM 2 dm r ' 2 dm 2rCM r ' dm Ossia I O mrCM r' dm mrCM I CM 2 2 2 Pendolo composto Si chiama pendolo composto o pendolo fisico ogni corpo rigido che possa oscillare per azione del suo peso in un piano verticale attorno ad un asse orizzontale non passante per il suo centro di massa. Il momento della forza peso è O h CM mg M r mg hmg sen Il segno negativo è dovuto al fatto che si ha una forza di richiamo Pendolo composto O h Studiamone il moto CM M r mg hmg sen dL z d 2 I z I z 2 dt dt mg dL z d 2 I z I z 2 hmg sen dt dt d 2 E per piccole oscillazioni mgh sen 0 2 Iz dt d 2 mgh 0 2 Iz dt Pendolo composto O h d 2 mgh 0 2 Iz dt CM mg che ha soluzione t 0 sent T 2 Iz l mh 2 Iz con mgh 2 mgh l g lunghezza ridotta del pendolo Iz Pendolo composto O h Se poniamo IC h' I C mhh ' mh CM h' mg O' I C mh 2 I C Iz l h h' h h mh mh mh Se facciamo oscillare attorno ad O’ I C mh '2 IC I' mhh' l' h' h' h h' l mh ' mh ' mh ' mh ' Cioè l' l Il periodo di oscillazione intorno ai due assi è lo stesso Rotolamento puro ω 2 v CM v CM r C v C v CM ω r v CM Se vC 0 v CM ω r Il moto del centro di massa è regolato dalle seguenti equazioni vCM ωr aCM r Rotolamento puro sfera ω F fa C Considerando tutte le equazioni Per la traslazione F f a mg N mg 0 Per la rotazione M r f a Iα f a r I I F m 2 aCM R F f a maCM F F a I CM I I f a a 2 CM m 2 m1 R 2 R mR I I F F f a 2 aCM 2 I R2 R R m1 m 1 2 mR I Per il rotolamento puro occorre che f a s mg
Scaricare