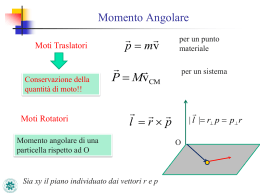
Dinamica dei moti rotatori Nel seguito discuteremo la dinamica della rotazione di un corpo rigido intorno ad un asse fisso. Ricordiamo la definizione di corpo rigido: Corpo rigido: insieme di particelle rigidamente connesse, cioè tali che le mutue distanze restino fisse. Se un corpo rigido ruota attorno ad un asse fisso, ogni punto del corpo descrive una traiettoria circolare ed i centri di tutte queste circonferenze stanno su una retta chiamata asse di rotazione (asse z in figura) . Abbiamo precedentemente discusso la cinematica del punto materiale per rotazioni attorno ad un asse fisso, trovando che tali moti sono descritti da equazioni cinematiche formalmente simili a quelle per i moti traslatori. Come mostreremo nelle prossime trasparenze, la dinamica rotazionale e’ anch’essa descritta da equazioni formalmente simili a quelle da noi precedentemente discusse per la dinamica dei moti traslatori. Come passo preliminare introduciamo due nuove grandezze fisiche che saranno molto utili: il momento di una forza ed il momento angolare di un punto materiale. Momento di una forza τ=rxF Dato un punto di riferimento O (polo) ed una forza F applicata ad un punto materiale P, si definisce momento meccanico della forza F rispetto al polo O il vettore τ=rxF F P dove r e’ il vettore posizione del punto P rispetto al polo O. Fissati quindi F ed il punto P, il momento di una forza dipendera’ dalla scelta del polo O. Momento angolare di un punto materiale J= r x q Dato un punto di riferimento O (polo) ed una particella che si muove con quantita’ di moto q, si definisce momento angolare della particella rispetto al polo O il vettore J= r x q q dove r e’ il vettore posizione della particella rispetto al polo O. Fissati quindi q e la posizione della particella, il momento angolare di una particella dipendera’ dalla scelta del polo O. Momento angolare di un punto materiale e momento meccanico Dato un punto materiale il momento angolare rispetto ad un polo O di un sistema di riferimento inerziale sara’: J= r x q dove r e’ il vettore posizione della particella rispetto al polo O. ( ) dq dJ d dr = r×q = ×q+r× dt dt dt dt dq dq dJ = v×q + r× = r× = r×F = τ dt dt dt dJ τ = dt La derivata rispetto al tempo del momento angolare di un punto materiale è uguale al momento delle forze applicate al punto materiale. Questo risultato è l’analogo rotazionale dell’equazione: F = dq dt Condizioni di conservazione del momento angolare per un sistema di particelle Dato un sistema costituito da n particelle, il momento angolare totale del sistema di particelle ripetto ad un polo O fisso di un sistema di riferimento inerziale sara’: n n i =1 i =1 J Tot = ∑ ji =∑ (r i x q i ) Ci proponiamo ora di vedere sotto quali condizioni il momento angolare totale del sistema di particelle e’ conservato. Abbiamo che: tot dJ dt n d = dt = ∑ i =1 n (r ix q i ) = n ∑ i =1 (v ix q i ) + (r ix ∑ i =1 d (r ix q i ) = dt d qi) dt Ma poiche’ i vettori vi e qi sono paralleli → vixqi = 0 d/dt(qi) = Fi = Fiext+Fiint per la II legge di Newton → (dove Fi, risultante delle forze agenti sulla particella, e’ stata scomposta in Fiint, risultante delle forze interne al sistema agenti sulla particella, ed Fiext, risultante delle forze esterne al sistema agenti sulla particella .) Quindi: tot dJ dt = n ∑ (r i x Fi ) = i =1 n ∑ (r ix F int i )+ i =1 = n ∑ i =1 τ int i + n ∑ i =1 n ∑ (r ix Fi ) = +τ ext ext i =1 ext τi = τ int Qui: risultante dei momenti associati alle forze esterne agenti sul sistema e int τ e’ la risultante dei momenti associati alle forze interne agenti sul sistema. τext e’ la Condizioni di conservazione del momento angolare per un sistema di particelle Forma forte della III legge di Newton: le forze agenti tra due particelle qualsiasi sono non solo uguali e opposte in verso, ma sono dirette lungo la congiungente le due particelle (stessa retta di azione). Come conseguenza della III legge di Newton nella forma forte, τint , risultante dei momenti associati alle forze interne agenti sul sistema e’ zero. Consideriamo per esempio un sistema di due particelle F12=-F21 τint= r1xF21 + r2xF12 = =r1xF21- r2xF21= =(r1-r2) xF21=0 Dove l’ultimo prodotto vettoriale e’ nullo poiche’ i vettori (r1-r2), F21 e F12 y F21 r1 r1 -r2 r2 F12 O x agiscono sulla stessa retta. Abbiamo quindi dimostrato che: condizione necessaria e sufficiente affinche’ il momento angolare totale di un sistema di particelle si conservi e’ che la risultante dei momenti associati alle forze esterne agenti sul sistema sia nulla. Equazioni cardinali per la dinamica dei sistemi di particelle Ricordando i risultati precedentemente ottenuti per la variazione con il tempo della quantita’ di moto totale di un sistema di particelle, abbiamo le seguenti equazioni cardinali per la meccanica dei sistemi di particelle: d Tot F = Q = M a cm dt d tot ext τ = J dt ext Energia cinetica di un corpo rigido ruotante attorno ad un asse fisso Desideriamo ora calcolare la energia cinetica K di un corpo rigido in rotazione con velocita’ angolare ω attorno ad un asse fisso. Facciamo inizialmente l’ipotesi che il corpo rigido sia costituito da un insieme di particelle rigidamente fissate una all’altra. Esse quindi avranno tutte la stessa velocita’ angolare ω. La energia cinetica della singola particella sara’: Ki = 1/2 mi (vi)2 dove vi= ω ri Essendo ri la distanza del punto considerato dall’asse di rotazione. Pertanto n 1 2 n 1 1 1 2 2 2 2 K = ∑ mi vi = ∑ mi (riω) = ∑mi ri ω = Iω 2 i=1 2 i =1 2 i =1 2 La quantita’ I= Σmiri2 prende il nome di momento di inerzia n Essa e’ caratteristica del corpo e dell’asse di rotazione considerati . La unita’ di misura del momento di inerzia nel S.I. sara’ quindi il kg m2 . La energia cinetica per la rotazione di un corpo rigido e’ quindi espressa da una espressione formalmente simile a quella trovata per il moto traslatorio. K=1/2 I ω2 ⇔ K=1/2 m v2 Calcolo del momento di inerzia per un corpo rigido continuo Se il corpo rigido e’ un corpo continuo, esso puo’ considerarsi suddiviso in infiniti elementi di massa infinitesimi dm ed il suo momento di inerzia si calcola sostituendo la sommatoria con un integrale esteso all’intero volume del corpo. I = ∫ r 2 dm Nota: piu’ la distribuzione di massa di un corpo e’ lontana dall’asse di rotazione, piu’ grande e’ il momento di inerzia. Teorema di Huygens-Steiner E’ possibile dimostrare il seguente teorema: Il momento di inerzia I di un corpo rigido rispetto ad un asse qualsiasi z e’ uguale al momento di inerzia Icm rispetto ad un asse z’ parallelo al primo e passante per il centro di massa più il prodotto della massa del corpo M per il quadrato della distanza R fra i due assi. R I=Icm+MR2 Tale teorema prende il nome di teorema di Huygens-Steiner Esempio 1 Il momento di inerzia di una sbarra sottile ed omogenea, di massa M e lunghezza L, rispetto ad un asse passante per il suo centro di massa e’ ICM= 1/12 M L2 . Vogliamo calcolare il momento di inerzia I rispetto ad un asse passante per l’estremo della sbarretta . I=ICM+MR2= 1/12 M L2 +M(L/2)2=1/3 M L2 Momento angolare di un corpo rigido ruotante attorno ad un asse fisso Desideriamo ora calcolare la componente del momento angolare J di un corpo rigido rispetto ad un asse supponendo che il corpo sia in rotazione con velocita’ angolare ω attorno a questo asse fisso. Il corpo rigido è costituito da un insieme di particelle rigidamente fissate una all’altra. Esse quindi avranno tutte la stessa velocita’ angolare ω. Nota: Il momento angolare J di un corpo rigido che ruota rispetto ad un asse non è in generale parallelo all’asse di rotazione ji Assumiamo l’asse z come asse di rotazione: il momento angolare della singola particella rispetto al polo O (fisso) posizionato sull’asse di rotazione z sara’: ji =ri x mivi ri forma un agolo θi con l’asse z, ji è ortogonale al piano individuato da ri e vi e forma un angolo 90°-θi con l’asse z. Il modulo di ji è |ji|=mi|r|i |vi|= mi|r|i Ri|ω| Calcoliamo la proiezione del momento angolare ji sull’asse di rotazione z: π jiz = j i cos −θi = j i sin(θi ) = mi r i sin(θi )Ri ω = mi Ri2 ω 2 jz = ∑i jiz = ∑i mi Ri2 ω = IZ ω La componente del momento angolare di un corpo rigido rispetto all’asse di rotazione ha una espressione formalmente simile a quella della quantita’ di moto Jz= Iz |ω| ⇔ Q= m V Momento delle forze ed accelerazione angolare di un corpo rigido ruotante attorno ad un asse fisso Sappiamo che se su un corpo agisce una forza risultante F esso, in base alla II legge di Newton, si muovera’ con una accelerazione a tale che d F = Q = Ma dt Ci chiediamo se esista una relazione formalmente simile, che leghi il momento risultante delle forze rispetto all’asse di rotazione τ e la accelerazione angolare α, per un corpo rigido ruotante attorno ad un asse fisso. Ricordiamo che in generale per un sistema di particelle: τ ext d Tot = J dt Per un corpo rigido ruotante attorno ad un asse fisso e nel caso in cui J sia parallelo a ω (l’asse di rotazione è un asse di simmetria del corpo rigido o più in generale è un asse principale di inerzia) J = Jz = Iz ω J = Iz ω Quindi: τ ext d d = J = Iz ω = Iz α dt dt La accelerazione angolare α per la rotazione di un corpo rigido (J parallelo a ω) e’ quindi legata al momento delle forze risultanti da una espressione formalmente simile alla II legge di Newton. (Equazione del moto di rotazione) Altre relazioni utili per lo studio del moto rotatorio di un corpo rigido attorno ad un asse fisso Abbiamo fatto vedere che, per i moti rotatori attorno ad un asse fisso, valgono delle relazioni formalmente simili a quelle dei moti traslatori. Altre importanti relazioni, che non dimostreremo, sono le seguenti: Se un corpo rigido compie uno spostamento angolare infinitesimo dθ sotto l’azione di un momento τ il lavoro infinitesimo compiuto e’ dL = τ • dθ Quindi per una rotazione finita si ha θf L = ∫ τ ⋅ dθ θi mentre la potenza istantanea sarà: dL P= = τ ⋅ω dt Se un corpo ruota attorno ad un asse sotto l’azione di un momento risultante τ per il teorema dell’energia cinetica si ha: θf 1 2 1 2 L = ∫ τ ⋅ dθ = Iω f − Iωi 2 2 θi Esempio 1 Una carrucola, costituita da un disco omogeneo di massa M e raggio R, puo’ ruotare senza attriti attorno ad un asse orizzontale. Un corpo di massa m e’ connesso ad una fune inestensibile di massa trascurabile avvolta attorno alla carrucola. Se si lascia andare il corpo, esso scende sotto l’azione della sua forza peso e la carrucola si mette in rotazione. Calcolare l’accelerazione del corpo, l’accelerazione angolare della carrucola e la tensione della fune. x T’ y La carrucola e’ messa in rotazione grazie al momento τ associato alla forza T che la fune esercita sulla carrucola. Le equazioni che governano il moto del corpo e della carrucola sono : ΣFi = m a ⇒ T’+ mg = m a Στi = I α ⇒ RT i = I α i Inoltre, poiche’ la fune e’ di massa trascurabile, si ha: |T’|=|T|=T Proiettando la prima equazione sull’asse y e la seconda sull’asse x abbiamo: 1) -T+mg=may e 2) RT= I α x T’ y 1) -T+mg = may e 2) RT= I α Inoltre, poiche’ la fune e’ inestensibile si ha: 3) ay = α R Quindi dalla equazione 2) 4) T = I α /R = (I /R) ( ay/R) =(I ay /R2) Sostituendo nella equazione 1) otteniamo la accelerazione ay -(I ay /R2) +mg=may ⇒ ay(m+ I /R2)=mg ⇒ ay=mg/ (m+ I /R2) ⇒ ay=g/ (1+ I /mR2) Dalla equazione 4) T = (I ay /R2) = (I/R2) g/ (1+ I /mR2) ⇒ T=Ig/ (R2+ I /m) Dalla equazione 3) α= ay /R ⇒ α= g/ (R+ I /mR) Conservazione del momento angolare: alcuni esempi semiqualitativi y J J Un uomo, seduto su uno sgabello che puo’ girare attorno ad un asse verticale, tiene nelle mani due pesi. Inizialmente l’uomo ha le braccia distese, e lo sgabello viene posto in rotazione con velocita’ angolare ωi come schematizzato in figura. Il vettore momento angolare J ha direzione verticale ed e’ rivolto verso l’alto. Improvvisamente l’uomo stringe le braccia. In tal modo la distribuzione delle masse del sistema sgabello piu’ uomo si avvicina all’asse di rotazione ed il momento di inerzia del sistema diminuisce. Poiche’ sul sistema uomo piu sgabello non agiscono momenti associati alle forze esterne, il momento angolare totale del sistema J = I ω deve conservarsi. Dovendo conservarsi il momento angolare, e diminuendo il momento di inerzia, si osservera’ un aumento della velocita’ angolare del sistema uomo piu’ sgabello. La orientazione di un satellite, o di una sonda spaziale, puo’ essere modificata utilizzando dei volani come indicato in modo schematico in figura. Sul sistema satellite piu’ volano non agiscono momenti di forze esterne, quindi il momento angolare totale del sistema deve rimanere uguale al valore iniziale, cioe’ zero. Se si mette in rotazione il volano, il satellite ruotera’ in senso opposto per conservare il momento angolare totale del sistema. Se si arresta il volano anche la rotazione del satellite si arresta, ma nel frattempo la sua orientazione e’ cambiata. Una tuffatrice esegue un salto mortale e mezzo in avanti. Durante il tuffo il suo centro di massa segue, come sappiamo, una traiettoria parabolica. La tuffatrice lascia il trampolino con un momento angolare J diverso da zero rispetto ad un asse passante per il suo centro di massa (J ha direzione perpendicolare alla figura e verso entrante nella pagina). Durante il tuffo non agiscono momenti di forze esterne, quindi il momento angolare deve conservarsi. Tirando a se le braccia e le gambe la tuffatrice diminuisce il suo momento di inerzia rispetto all’asse di rotazione, provocando un aumento della sua velocita’ angolare per conservare il momento angolare. Al termine del tuffo, la tuffatrice si distende aumentando il suo momento di inerzia per far diminuire al massimo la sua velocita’ angolare. Moti rototraslatori Il moto di un corpo rigido che ruota attorno ad un asse in movimento puo’, in generale, essere molto complesso. Ci limiteremo qui a discutere il moto di rotolamento su una superficie piana di un corpo altamente simmetrico rispetto al suo asse di rotazione come ad esempio un cilindro, una sfera, un cerchio. Consideriamo un cerchio di raggio R, come ad esempio una ruota di bicicletta, che rotoli senza strisciare su un piano. Quando il cerchio ruota di un angolo θ il suo centro di massa, che percorre una linea retta, si e’ spostato di un tratto s=R θ. Pertanto, i moduli della velocita’ Vcm e della accelerazione acm del centro di massa saranno legate ai moduli della velocita’ angolare ω e della accelerazione angolare α della ruota. Vcm = ds/dt = R dθ/dt = R ω acm = dVcm /dt = R d ω /dt = R α Velocita’ nei moti rototraslatori Il moto di rotolamento e’ la combinazione di un moto rotazione della ruota attorno al suo asse con un moto di traslazione del centro di massa. Come mostrato in figura dalla combinazione di questi due moti risulta che, ad un istante t generico, il punto P di contatto della ruota col terreno ha velocita’ nulla mentre il punto piu’ alto della ruota ha velocita’ 2Vcm. Energia cinetica nei moti rototraslatori Abbiamo visto che il moto di rototraslazione della ruota puo’ essere considerato come la combinazione di un moto di rotazione attorno al centro di massa piu’ un moto di pura traslazione del centro si massa. E’ possibile mostrare che la energia cinetica K di un corpo rotolante di massa M e’ data dalla somma di due termini: La energia cinetica associata al moto del centro di massa Kcm=1/2 M (Vcm)2 e la energia cinetica rotazionale attorno al centro di massa Krot= ½ I ω2 K = 1/2 M (Vcm)2 + 1/2 Iω2 dove ricordiamo che Vcm =Rω Moti rototraslatori, moto di pura rotazione E’ possibile trattare il caso di un corpo che rotola come se il suo moto fosse di pura rotazione. Possiamo considerare l’asse di istantanea rotazione passante per il punto di contatto P. In un certo istante il corpo ruota intorno ad un asse fisso passante per P con una certa velocità angolare ω. L’energia cinetica rotazionale potrà quindi scriversi come: Asse di istantanea rotazione 1 K = I Pω 2 2 Dove Ip è il momento di inerzia rispetto all’asse passante per P. Possiamo 2 utilizzare il teorema di Huygens-Steiner e scrivere: I P = I CM + MR K= 1 1 I CM ω 2 + MR 2ω 2 2 2 Rω=VCM rappresenta la velocità con cui il CM si muove rispetto al punto P Possiamo quindi scrivere l’energia cinetica K: K= 1 1 I CM ω 2 + MVCM 2 2 2 Esempio 3 Una sfera parte dalla sommita’ di un piano inclinato ad un quota h e rotola senza strisciare fino alla base del piano. Calcolare la velocita’ di traslazione Vcm della sfera alla base del piano inclinato Sulla sfera agiscono le seguenti forze: la forza peso che e’ conservativa, la forza normale n che e’ istante per istante perpendicolare allo spostamento del centro di massa quindi non compie lavoro, e la forza di attrito f. Tale forza di attrito f genera il momento rispetto all’asse di rotazione che fa aumentare la velocita’ angolare della sfera. In assenza di tale forza la sfera striscerebbe sul piano inclinato senza rotolare. Tale forza tuttavia non compie lavoro perche’, come abbiamo visto, il punto di contatto della sfera e’ ad ogni istante fermo rispetto al piano. Pertanto, per risolvere il problema, possiamo fare uso della conservazione della energia meccanica totale. Ei=Ef ⇒ Ui + Ki = Uf + Kf Mgh + 0 = 0 + 1/2M(Vcm)2 + 1/2 I ω2 Mgh = 1/2M(Vcm)2 + 1/2 I (Vcm/R)2 Esempio 3 Mgh = 1/2M(Vcm)2 + 1/2 I (Vcm)2/(R)2 Mgh = (Vcm)2 (M/2+I/(2R2) ) Vcm=( Mgh/(M/2+I/(2R2) ) ) 1/2 Poiche’ per una sfera che ruota rispetto al diametro I dopo qualche passaggio si trova che: = 2/5 M R2, Vcm= (10/7 g h ) ½ Consideriamo ora un corpo di massa M che, partendo dalla stessa quota della sfera, scivoli senza attrito sul piano inclinato e calcoliamo la sua velocita’ finale V alla base del piano. Mgh = ½ M V2 ⇒ V=(2 g h)1/2 avremmo quindi V > Vc.m. sfera Infatti, in tal caso, la energia potenziale iniziale si e’ trasformata interamente in energia di traslazione del corpo, mentre nel caso della sfera la energia potenziale iniziale si e’ trasformata in energia cinetica traslazionale piu’ energia cinetica rotazionale. Condizioni di equilibrio di un corpo rigido Diciamo che un corpo e’ in equilibrio meccanico se visto da un sistema di riferimento inerziale: 1) L’accelerazione lineare aCM del suo CM è nulla. 2) La sua accelerazione angolare α attorno ad un qualunque asse fisso in tale sistema è nulla. In particolare, se il corpo è fermo VCM=0 e ω=0 il corpo si dirà in equilibrio statico. Quali sono le condizioni che devono essere soddisfatte Affiche’ in corpo sia in equilibrio? Dalla seconda legge di Newton capiamo che la prima condizione che deve essere soddisfatta affinche’ aCM=0 e che la risultante delle forze agenti sul corpo deve essere nulla n M a cm = ∑F i =0 i =1 Se il corpo può essere assimilato ad un punto la suddetta relazione e’ una condizione necessaria e sufficiente per l’equilibrio. Tuttavia, nel caso di un corpo esteso sappiamo che, anche se la risultante delle forze esterne e’ nulla, la risultante dei momenti associati alle forze esterne potrebbe essere diversa da zero ed il corpo sarebbe soggetto ad una accelerazione angolare. Affinche’ il corpo sia in equilibrio, e’ quindi anche necessario che la risultante dei momenti delle forze rispetto ad un polo O sia nulla. n ∑τ i =1 i =0 n Si può dimostrare che, pern un corpo in equilibrio traslazionale, se ∑ τ i =0 i =1 per un determinato polo O, ∑ τ i =0 sarà nulla anche per ogni altro polo i =1 in quel sistema di riferimento Alcuni quesiti di verifica 1)Scelto un polo O, come sono definiti il momento di una forza e il momento angolare di una particella? 2)Sapreste dire e dimostrare sotto quali condizioni si conserva il momento angolare totale di un sistema di particelle? 3)Sapreste dire e dimostrare quali sono le due equazioni cardinali per il moto di un sistema di particelle ? Queste equazioni ci consentono di capire sotto quali condizioni si conservano il momento angolare totale e la quantita’ di moto totale di un sistema di particelle? 4)Avete capito l’enunciato e sapreste applicare il teorema di HuygensSteiner? 5)Sapreste mostrare e discutere degli esempi concreti che mettano in evidenza la conservazione del momento angolare? 6)Un cilindro di massa m parte da fermo dalla sommita’ di un piano inclinato. Esso rotola senza strisciare sul piano ed arriva alla base del piano con una velocita’ di traslazione Vf1 in modulo. Un cubo di eguale massa m parte da fermo dalla sommita’ dello stesso piano inclinato. Esso scivola senza attrito sul piano e arriva alla base del piano inclinato con una velocita’ di traslazione Vf2 in modulo. Quale delle due velocita’ Vf1 e Vf2 sara maggiore? Spiegare sia utilizzando la conservazione della energia meccanica totale sia considerando le forze agenti. 7)Quali sono le condizioni di equilibrio per un corpo rigido?
Scaricare