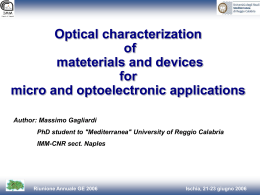
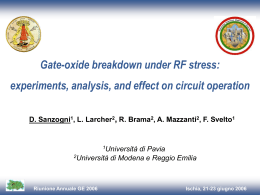
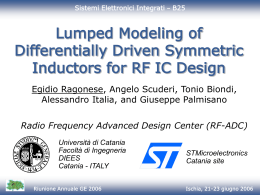
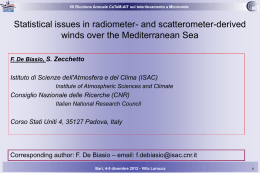
Exploring lakes and dune features on Titan surface through SAR images and electromagnetic models M. Callegari(1), D. Casarano(2) , C. Notarnicola(1) , L. Pasolli(1), B.Ventura (1), (1)Institute for Applied Remote Sensing, EURAC Bolzano, Italy. (2)CNR-IRPI, Via Amendola 122 I, Bari, Italy, VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Outline Analysis of Titan’s Ontario lake bathymetry with SAR data using e.m. models and Bayesian inversion algorithms Estimation of optical thickness with Bayesian inversion methods also allowing to obtain incertitude estimation Study of the effect of the hypotheses on wave motion, with the possibility to constrain likely wind speed ranges Physical depth maps based on loss tangent estimation performed integrating SAR and altimeter data Error budget SAR data processing on Titan‘s dune fields for physical-morphological parameter retrieval Discussion of the hypothesis of dune homogeneity Estimation of physical-morphological dune field parameters merging information from SAR images acquired with different geometry VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 The Cassini mission The Cassini mission is a cooperative project between NASA (National Aeronautics and Space Administration), ESA (European Space Agency) and Italian Space Agency (ASI). Cassini was launched on October 15th, 1997 by a TitanIV/Centaur Rocket. Cassini has travelled at an average speed of about 16.4 kilometres per second and covered a distance of about 3474 million kilometres In order to reach the Saturnian’s system on July 1st, 2004. The Cassini Mission initially foreseen until 2008, has been extended to 2012 (XX) and now until 2018 (Solstice Mission). VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 The Cassini Radar Radar modes: Instrument Description Altimeter: topographical profiles 4.25 MHz bandwidth, 24 to 27 km horizontal, 90 to 150 m vertical resolution Scatterometer: radar reflectivity of Titan’s surface 0.1 MHz bandwidth, 10 to 200 km resolution Radiometer: surface emissivity and dielectric constant of superficial features 135 MHz bandwidth, 7 to 310 km resolution SAR: construction of visual images of the target surface 0.45 MHz and 0.85 MHz bandwidth, 0.35 to 1.7 km resolution Peak power: 86 W Frequency: 13.78 GHz Data rates: 1 kbps: Radiometer only 30 kbps: Altimeter and Scatterometer/Radiometer 365 kbps: SAR Imaging/Radiometer VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Typical Titan’s flyby VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Titan’s wide variety of surface features VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 T57-58-65: Ontario lake In the T57 an important lake area (16000 km2) was first detected in the Southern polar region. Altimetry data offer strong evidence that Ontario Lacus is a basin filled with liquid. Detected heights reveal a flat lake surface. Individual echoes show very strong specular reflection, thus an extremely flat lake surface, with <3 mm rms height variation over 100‐meter lengths [Wye et al., 2009]. If wind‐wave generation theories [e.g., Ghafoor et al., 2000; Notarnicola et al., 2009; Lorenz et al., 2005] apply under Titan conditions, then either the winds were very weak (<0.3 m/sec [Notarnicola et al., 2009] during the altimetry observation, or the liquid material is much more resistant to wave generation than previously thought [Wye et al., 2009]. From Wall et al., 2010 VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Ontario lake bathymetry Objective: To investigate lake bathymetry considering the effect of the hypotheses on boundary conditions, to retrieve also possible constraint to these parameters, in particular wind speed VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Modelling scattering from liquid surfaces Pi i air lake t Total liquid depth l ground g VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Electromagnetic models I Integral Equation Model qps S (J ,Js ) • 2 k exp s 2 k z2 k sz2 2 s n 1 2n I n 2 pq W n k sx k x , k sy k y n! qps is the bistatic single-scatter surface model for pp polarization based on the integral equations with simplified Green’s function; • W(n) is the Fourier transform of the n-th power of the surface correlation coefficient; • S(J,Js) is the bistatic shadowing function as defined by Sancer; n • I qp is a function of k and of the field coefficients, fqp and Fqp that are in turn function of the Fresnel’s coefficient, J and j . VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Electromagnetic models II Bragg scattering (incidence angles exceeding 20°) r pq 8k cosJ a pq 12W 2k sin J ,0 4 2 2 where apq is the Fresnel’s coefficient; 1 W (2k sin J , 0) describes the normalized wave spectrum. Facets scattering (low incidence angles) r pp J R pp 0 2 tan e 2 J 2 2 2 2 cos 4 J where Rpp is the Fresnel’s coefficient; is the RMS slope. VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Electromagnetic models III Gravity-capillary wave description: Donelan-Pierson model To model the electromagnetic scattering from this liquid layer, wave spectra have been described with Donelan-Pierson model. Kinematic viscosity, density, surface tension, needed for the capillary wave description are taken into account. g kp 2 1 . 22 u 10 Gravity wave (k<10 k ) Capillary wave (k>10k ) p p 3.24 103U 10 g2 S k exp 2 4 k 2.5 g 0.5 k 1.2U 10 2 2 0.194 a U k 4k S k 3 1 k a f ck a c k S k DN k , k Sk k , is the directional spectrum ( = azimuth angle); introduces kinematic viscosity; a is S k k , function of surface tension, gravity and wave number describing the transition between gravity and capillary regimes. VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 1 n Electromagnetic models IV Double layer scattering: - the first component, derived from liquid surface, is modelled considering Bragg and facets scattering; - the second is determined by non-coherent scattering from bottom boundary surface attenuated by the liquid layer, approximated by using the IEM model and by accounting for crossing of the top surface boundary and attenuation due to propagation loss through the layer. cos J 2 0 T12 (J ,Jt )T21 (Jt , J ) exp( ) gr cos Jt cos Jt 0 b J and Jt are respectively the incident and the transmitted angles; Tpp the Fresnel power transmission coefficient; 0gr is the scattering from bottom surface that has been modelled by using the IEM model; is the liquid optical thickness: x dp dp 2 Re tan tan Im( ) Re( ) VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 E:M: modelling and Bayesian inversion application to lake depth estimation Titan features hyphoteses/ measurements E.M. Models Sensor Acquisitions 0 (TB) 0 sim (TB, sim) Comparison and Possible ranges for Surface parameters Inversion techniques Probability density functions for surface parameters and related uncertaintes VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Inversion algorithm Bayes’ theorem allows to turn the probability of calculated trend (generated by models in the training phase) into probability of the associated parameters set. f (S i | i ) f (, s, l, ,... | (1 ), ( 2 ),...) f (S i )f ( i | S i ) f ( i ) f (, l, s, ,...) f ((1 ), ( 2 ),... | , s, l, ,...) f ((1 ), ( 2 ),...) The estimation of noise (error) functions is the main objective of the training phase. In fact, the noise function, due to the presence of the natural target variability, the experimental uncertainties and the approximation of the assumptions in the e.m. scattering models and target properties, inferred in this phase is assumed valid also in the test phase VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 It can be assumed that the associated targets can be classified in different groups, each one characterized by homogeneous properties. In this case, the objective is to obtain surface parameters pdfs estimate for each target class. For Titan lakes of T16-T19, it was assumed (as stated by the e.m. model results) that the capillary wave contribution was smaller with respect to the bottom contribution, and the 0 values were depending only on the incidence angle and the optical thickness. Lakes were grouped in three classes, based on their 0 values in each interval of incidence angles (it was assumed that the optical thickness distribution was independent on the incindence angle) VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Optical thickness maps for Ontario lake a c b d Optical thickness map obtained with Notarnicola et al., (2009) model when εg= 3.1, vwind=0, 0.5, 0.8 and 1.0 m/s a, b,c,d) VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Hypotheses on wind speeds and effect on lake depth estimation The hypothesis of v>0.7 m/s leads to optical thickness estimates corresponding to total attenuation of scattering from lake bottom, also on areas with scattering coefficients significantly higher than the lake innermost areas A maximum limit of 0.7 m/s is compatible with the outputs of circulation models (Schneider et al., 2012). VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Ontario lake bathymetry Depth map of Ontario lake obtained using the Pb model when null wind speed and =3.1 (a); wind speed of 0.7 m/s and =4.5 (b). These two extreme cases indicates that the higher is the wind speed the weaker is the scattering response from the bed It is assumed the loss tangent value estimated by Paillou et al. (2008) and also confirmed by Hayes et al. (2010) obtained with the integration of SAR and altimeter data (3.7-8.7 10-4) VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Error estimation on lake bathymetry VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 …including uncertainties in pdf VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Next steps • Loss tangent estimation using altimeter data and bayesian algorithm in order to derive an independent value • Bathymetry maps on other lake areas • Complete evaluation of error budget using all the major componenets such as bayesian inversion techniques, constrains on physical parameters. • Possible change detection from new acquisitions on lakes including synergy between SAR and radiometric data VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Titan dunes Titan dunes are mainly confined around the equatorial line, between -30° and 30° latitude and covering about 12.5% of the total Titan surface [1] Dunes material: [2] tholins sand (ε = [2, 2.5] and highly absorptive for the 2.2 cm wavelength signal) over an icy bed-rock (ε ≈ 3.1, low absorption) Titan dunes height estimation: Radarclinometry in case of material homogeneity [3]; Altimeter waveform analysis (in case of material homogeneity). [1] Le Gall, et al.,"Cassini SAR, radiometry, scatterometry and altimetry observations of Titan's dune fields," Icarus 213(2), 608-624 (2011). [2] Rodriguez, et al., P., "Impact of aerosols present in Titan's atmosphere on the CASSINI radar experiment," Icarus 164(1), 213–227 (2003). [3] Neish, et al., "Radarclinometry of the sand seas of Africa's Namibia and Saturn's moon Titan," Icarus 208(1), 385-394 (2010). VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Dunes backscattering - Fensal T29 Fensal T28 T3 T17 T25 T17 T25 Dunes are visible also in a parallel acquisition with respect to dunes direction Dunes material is not homogeneous: • Dark stripes: tholins sand (ε ≈ 2.2) • Bright stripes: sand-free (or thin layer of tholins sand) interdunes. The icy bedrock is more reflective (ε ≈ 3.1) and less absorptive than sand (volume + sublayer scattering can exist). VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Perpendicular acquisition Samples extracted from T17 and T3: perpendicular acquisition VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Hypothesis: homogeneous material signal bright dark What is that angle (i.e tilt angle = 2*slope of the dunes) for which bright and dark samples lie on the same curve? Tilt angle ≈ 30° Slope = 15° is it realistic? VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Fit with electromagnetic models GO: ɛ=4.3 ms=4 IEM: ɛ=5 s=0.5cm L=3cm For both GO and IEM the estimated values seem not realistic VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Dunes height estimation Considering an interdune spacing S ranging from 1 to 4 km we obtain mean dunes height H equal to: The estimated dunes result too high! VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 SAR acquisition over dunes with different observation direction Fly direction dark SAR bright dark bright dark «material effect» only dunes dark SAR bright dark bright dark signal «material» + «geometric» effect A B A B VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Backscattering angular behavior Only parallel acquisition with respect to dunes direction are considered The off-nadir angle is the same on both sides of the dune fit MAE bright (dB) MAE dark (dB) m = -0.29 1.20 0.96 m = -0.33 1.23 0.95 m = -0.23 1.18 1.04 – 0.93 VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Dunes height estimation VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 𝒎𝟏 = 𝒎𝟐 (each pixel of the two acquisition correspond to the same area) In dB scale (with 𝑉 = 10 σ°2 log10 ) σ°1 𝒈𝒅𝑩 𝜽𝒏𝟐 + 𝜶 = 𝑽 + 𝒈𝒅𝑩 𝜽𝒏𝟏 signal α α<0 α>0 If 𝒈𝒅𝑩 𝒙 is known (e.g. linear fit) it is possible to compute 𝜶. Then 𝒅𝒉 (pixel height) can be computed and thus a Digital Terrain Model (DTM) can be estimated VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 DTM estimation Parallel acquisition pixel slope (α) incremental pixel height (dh) Perpendicular acquisition integration DTM VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Compute single dune height For each dunes profile compute the dune height for each single dune: 𝑏 𝐻𝑢𝑝 = a b c 𝑖=𝑎 𝑑ℎ𝑖 𝑐 𝐻𝑑𝑜𝑤𝑛 𝐻𝑑𝑜𝑤𝑛 = − 𝑖=𝑏 𝑑ℎ𝑖 𝑑ℎ2 𝐻𝑢𝑝 𝑑ℎ1 𝐻= 𝐻𝑢𝑝 + 𝐻𝑑𝑜𝑤𝑛 2 pixel size VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Compute single dune height (example) 𝐻𝑢𝑝 𝐻𝑑𝑜𝑤𝑛 VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Pdf single dunes height 𝑔𝑑𝐵 𝜃 = 𝑚 ∙ 𝜃 mean = 86 m std = 66 m 𝑚 = −0.29 is the value that assures the best fit for the backscattering samples: mean = 117 m std = 90 m m mean = 180 m std = 138 m MAE bright (dB) MAE dark (dB) -0.29 1.20 0.96 -0.19 1.21 1.11 -0.39 1.32 0.97 VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012 Conclusions • Titan’s Ontario lake bathymetry maps were obtained from SAR images using scattering and wave spectum models and a Bayesian inversion algorithm • The dependence of depth estimates on the hypotheses on the wind speed alloed to pose realistc constraints on this parameter • Hypothesis of Fensal dunes homogeneous in composition and roughness is not verified • A simple model for separating the effects of acquisition geometry and surface constituents is suggested where both parallel and perpendicularSAR acquisitions are available on the same area • Altimeter data on the intersection area of parallel and perpendicular SAR acquisition could validate the results and allow to improve the dune model VII Riunione Annuale CeTeM-AIT, Bari, 4-5 Dicembre 2012
Scaricare