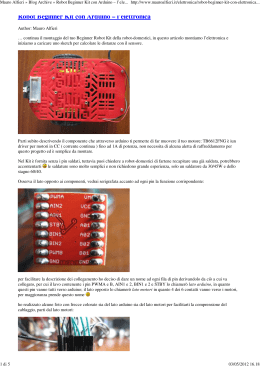
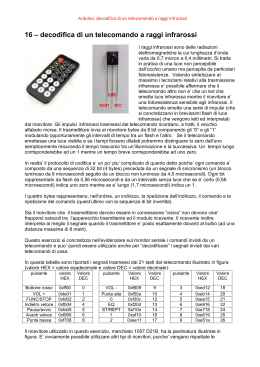
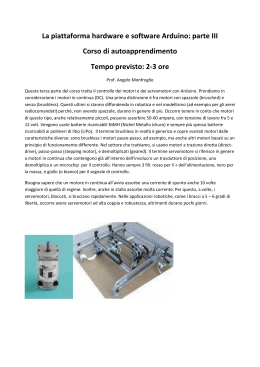
ROBOT QUADRUPEDE ROBOT QUADRUPEDE Alunni: Sebastijan Peruško Mihael Špeh 3.MOD SCUOLA MEDIA PIETRO COPPO Mentore: Maurizio Škerlič INDICE • • • • • • • COME E FATTO.........................................................................................4 SERVO MOTORI........................................................................................5 SCHEDA DI CONTROLLO..........................................................................6 TELECOMANDO.......................................................................................7 ARDUINO.................................................................................................8 ALLUMINIO..............................................................................................9 SOFTWARE.............................................................................................10 3 4 1 3 La struttura del robot è stata fatta con l’ alluminio 2 COME È FATTO 8 (2 per zampa) servo motori che muovono le zampe Arduino + scheda di controllo per controllare il robot. 4 Sensore ad ultrasuoni per non scontarsi con altri ogetti. 5 Telecomando ad infrarossi per muoverlo. SERVO MOTORE I servo motori usati sono da 38 grammi 41x20,1x38 mm HITEC HS-422 Utilizza due boccole in iron-oilite, ingranaggi in resina ad alta resistenza e circuiteria avanzata. L'HS-422 e' caratterizzato da una eccellente risoluzione e un centraggio preciso. 5 SCHEDA DI CONTROLLO La scheda di controllo che e stata utilizzata è "ROBOT_SHIELD« Può controllare fino a 8 servo motori, controllo remoto tramite un telecomando a raggi infrarossi e un sonar ultrasuoni che permette di riconoscere gli ostacoli. 6 TELECOMANDO Il telecomando usato e un Philips PHILIPS 242254990301. Funziona ad infrarossi. 7 Arduino ARDUINO Arduino è una scheda elettronica di piccole dimensioni con un microcontrollore e circuiteria di contorno, utile per creare rapidamente prototipi e per scopi hobbistici e didattici. 8 Alluminio ALLUMINIO La struttura del robot è stata fatto con alluminio da 2mm che è stato tagliato con al sega e poi unito con le altri parti. 9 SOFTWARE SOFTWARE Il software e stato creato in C++ 11 DISCUSSIONE 12
Scaricare