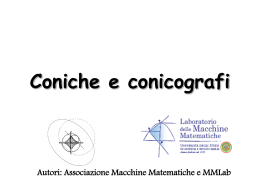
LE CONICHE 2 2 ax bxy cy dx ey f 0 1 ARGOMENTI TRATTATI 1. Le coniche, quali sono e come sono fatte 2. Considerazioni storiche 3. Le coniche come sezioni piane di un cono 4. Le coniche nella fisica 5. Le coniche nell’algebra 6. Definizioni e proprietà importanti 7. Le coniche come luoghi geometrici 8. Lo studio di una conica 9. Rette tangenti ad una conica condotte da un punto 10. Esercizi di riepilogo 2 LE CONICHE, QUALI SONO E COME SONO FATTE 3 CONSIDERAZIONI STORICHE Le coniche sono curve studiate sin dall'antichità e molti matematici hanno dato il loro contributo allo studio di tali curve. Sembra che per primo Menecmo (375-325 a.C.), un matematico greco maestro di Alessandro Magno, si sia imbattuto nelle coniche nel tentativo di risolvere uno dei tre famosi problemi della matematica greca (i problemi di Delo). Egli stava studiando curve dotate di proprietà adatte alla duplicazione del cubo. Apollonio (262-190 a.C.), conosciuto come il Grande Geometra, consolidò ed approfondì i precedenti risultati sulle coniche nell'opera Le Coniche. Apollonio fu il primo a dimostrare che era possibile ottenere tutte e tre le sezioni coniche intersecando un cono con un piano e facendo poi variare l'inclinazione di tale piano. Fu anche il primo ad attribuire i nomi di ellisse, parabola, ed iperbole. Tali nomi traggono origine dal confronto di due grandezze caratteristiche di ciascuna curva. Ellisse vuol dire mancanza, iperbole significa "andare oltre", e parabola, "mettere accanto". Pur interessante dal punto di vista matematico, lo studio delle coniche aveva scarsi interessi pratici e venne abbandonato per diversi anni. Solo dopo circa 1800 anni lo studio di Apollonio poté fare passi avanti. Questo fu dovuto essenzialmente all'introduzione dei nuovi metodi matematici basati sulle coordinate cartesiane, ma anche al sorgere di un nuovo interesse scientifico. Da segnalare nell'ordine Galileo (moto di un proiettile) Cartesio, Keplero, Pascal, ed infine Newton, che utilizzarono lo studio delle coniche applicato a scoperte scientifiche. 4 LE CONICHE COME SEZIONI PIANE DEL CONO Chiamiamo conica quella curva piana che si ottiene intersecando una superficie conica di rotazione a due falde con un piano. Si definisce superficie conica di rotazione a due falde la superficie generata da una retta r che ruota di 360° intorno ad un asse a, che la interseca in un punto V, formando con esso un angolo costante. Definizioni: r – retta generatrice; a – asse di rotazione e di simmetria; – angolo di semiapertura, con 0 < < 90° ; V – vertice del cono di rotazione; – piano secante; n – normale al piano a’ – piano a-n ∩ piano – angolo acuto fra asse a e a’ Possono verificarsi i seguenti casi: 1. Il piano non passa per V a. 0 < iperbole b. = parabola a. < < 90° ellisse d. = 90° circonferenza 2. Il piano passa per V coniche degeneri. a. 0 < una coppia di rette b. = una retta a. < 90° un punto (il punto V) 5 6 LE CONICHE IN FISICA In particolare le leggi di Keplero sui movimenti dei pianeti diedero una notevole applicazione delle coniche e delle loro proprietà geometriche. In termini moderni possiamo dire che ogni corpo dotato di massa determina intorno a sé una zona di spazio in cui le altre masse risentono della sua attrazione, un campo gravitazionale. Un corpo che si muove in un campo gravitazionale, può descrivere tre diversi tipi di traiettorie: ellittica, iperbolica o parabolica. Tali traiettorie dipendono dalla velocità iniziale e dalla direzione del corpo. Nel caso di orbite ellittiche si parla di traiettoria chiusa (per es. la terra intorno al sole, la luna intorno la terra). Nel caso di orbite iperboliche e paraboliche si parla di orbite aperte (per es. una cometa intorno al sole). Le coniche descrivono traiettorie possibili di corpi in interazione gravitazionale (per es. il sole e la terra, il sole e una cometa). Anche il moto di una carica in un campo elettrico a simmetria centrale, cioè originato da una carica puntiforme, è caratterizzato da traiettorie che appartengono alle “coniche”. 7 LE CONICHE NELL’ALGEBRA Definizione Si chiama conica il luogo geometrico dei punti del piano le cui coordinate (x;y) soddisfano ad un’equazione algebrica di 2° grado a coefficienti reali, del tipo 2 2 ax bxy cy dx ey f 0 (*) con almeno uno dei coefficien tre ti a, b, c diverso da zero. All’insieme delle soluzioni ( xi ; yi ) dell’equazione (*) possiamo infatti far corrispondere le coordinate dei punti Pi ( xi ; yi ) del piano cartesiano e tali punti formano appunto una conica. La corrispondenza è biunivoca, cioè vale anche l’affermazione: ai punti Pi ( xi ; yi ) di una conica, tracciata in un riferimento cartesiano, corrispondono le soluzioni dell’equazione (*). Classificazione delle coniche Data un' equazione del tipo (*), si dimostra che è possibile stabilire di quale conica si tratti, utilizzando i seguenti potentissimi strumenti algebrici: 1° ad ogni conica può essere associata una matrice M, detta matrice associata alla conica: 2d 2 a b M 2 c e2 b d 2 e 2 f il con det M suo determinan te , b ed be d d 2 b det M a c f e2 f c . 2 2 22 22 2 2 8 a b 2 2° dalla matrice M, si può estrarre la matrice , con determinante : b 2 c 2 a b 2 b δ det ; δ a c ( è detto discr nte del con . b 2 c 4 3° dalla matrice M, si ricava il termine di realtà: det M ac. Mediante i tre elementi det(M), δ, γ, è possibile classificare le coniche, espresse dalle equazioni del tipo (*), seguendo il seguente schema : • det(M) = 0 la conica è degenere, cioè è l'unione di due rette, che possono essere distinte o coincidenti, dette componeneti della conica (il primo membro dell’equazione (*) si può scomporre in due fattori di primo grado). • det(M) ≠ 0 la conica è non degenere e in tal caso la determinazione del tipo di conica dipende dal valore del discriminante δ della conica : un' iperbole 0 (iperbole equilatera se a c 0) la conica è una parabola 0 ellisse reale se 0 un' ellisse 0 (una circonfere nza se b 0 e a c) ellisse imma a se 0 9 Osservazione Se nell'equazione (*) manca il termine “xy” gli assi di simmetria della conica sono paralleli ciascuno ad un degli assi cartesiani, altrimenti il termine “xy” implica che gli assi di simmetria della conica siano ruotati . 2 2 ba c rispetto agli assi cartesiani di un angolo , tale che tg Esempi 1. Classifica le seguenti coniche, di cui è data l’equazione in forma generale. 2 2 a. x -3y 2xy 2x0 ; 1 1 1 M 1 3 0 10-101330 det 1 0 0 δ-31-40 ; det(M) 0 laconica nonè degenere ; conclusion i: δ0 laconica è un' iperbole ; ac20 l'iperbole nonè equilatera 10 3 2 6 2 2 b. 3x 4y 4xy 12x 8y 12 0 ; det M 2 4 4 3 (48 16) 2 (-24 24) 6 (-8 24) 0 ; 6 4 12 conclusion i : poichè det(M) 0 , la conica è degenere . 2 2 2 2 Scompongo in fattori : 3x 4y 4xy 12x 8y 12 0 4y 4 x 2 y 3 x 4 x 4 0 2 x 2 4 x 2 12 x 2 4y 4 x 2 y 3 x 2 0 ;y ; 4 2 2 2 2 3 y x2; -2x-24x-2 2 y ; x-2 4 y ; 2 l'equazione della conica può essere scritta come : 3 x-2 4y x2y3x -62y -x20 , 0 2y 2 2 quindi l'equazione individua laconica degenere coincident e con l'unione didue rette diequazione 3x2y -60 e x2y -20. 11 1 0 2 M 0 1 -5 c. x y-4x -10y 29 0; det 1 (29 -25) 2 (2) 0 ; -2 -5 29 2 2 conclusion i: poichè det(M) 0 , la conica èdegenere . 2 2 2 Cerco le soluzioni : 2 x y -4x -10y 29 0 y 10y x -4x 29 0 x 2 2 2 y 5 25 x 4 x 29 ; y 5 - x -2 l' equazione individua ilpunto C(2;5). y 5 Osserva che l' equazione ha formalment ele caratteris tiche di una circonfere nza ( 0, b 0, a c), quindi è, in particolar e, una circonfere nza degenere, cioè di raggio nullo, con centro C(2;5) . 2 2 d.3x 4y -4x 12y 0; 3 0 2 M 0 4 6 3(-36) det -28 124 0 2 6 0 12 0; det(M) 0 laconica non èdegenere ; conclusion i:0laconica èun' ellisse; det(M)(a c) 124 70 laconica èreale 12 Altri esempi 1. Determinare il tipo di conica individuato dalle equazioni assegnate: a. x2 – y2 + xy + 2x + 1 = 0 ; det(M)= -0,25 ≠ 0 conica non degenere = – 1 – 1/4 = -5/4 < 0 iperbole ; in particolare a + c = 0 iperbole equilatera ; b. 5x2 + 8y2 + 4xy + 8x + 14y + 5 = 0 ; det(M)= -81 ≠ 0 conica non degenere = 40 – 4 = 36 > 0 ellisse ; γ = det(M)( a + c) = -81·13 < 0 ellisse reale; 13 c. x2 + 2xy + y2 + 10x - 6y + 25 = 0 ; det(M)= -64 ≠ 0 = 1–1 = 0 d. conica non degenere parabola ; x2 + y2 + x – y – 2 = 0 ; det(M)= -2,5 ≠ 0 conica non degenere = 1·1 = 1 > 0 ellisse, in particolare è una circonferenza, perchè b = 0 e a = c γ = det(M)( a + c) = -2,5·2 < 0 circonferenza reale di centro C(-1/2;1/2). e. 5x2 + 4 y2 + 2 x – 3 y +1 = 0 ; det(M) = 4,75 ≠ 0 conica non degenere = 20 > 0 ellisse ; γ =det(M)( a + c) = 4,75·9 > 0 ellisse immaginaria. 14 DEFINIZIONI E PROPRIETA’ IMPORTANTI Considerazioni generali sulle curve algebriche Definizione Una curva del piano cartesiano si dice algebrica se è rappresentata da un’equazione F(x;y) = 0 , dove F(x;y) è un polinomio nelle variabili x e y a coefficienti reali. 2 2 Se il polinomio F(x;y) è di secondo grado, la curva è una conica: F x; y ax bxy cy dx ey f . Una curva non algebrica si dice trascendente. Per esempio, sono trascendenti le curve di equazione y = log ax , 2y -3ex = 0 . Definizione Si dice ordine della curva algebrica di equazione F(x;y) = 0 il grado del polinomio F(x;y). 1^ proprietà - L’ordine di una curva algebrica coincide con il numero massimo di intersezioni che questa può avere con una retta e in particolare con l’asse delle ascisse y = 0 . F x ; y 0 sia di grado n Infatti : F x ; mx q 0 e in particol e F x ;0 0 y mx q (e in particolar e y 0) L' equazione F x ; mx q 0 ha grado n, in partcolare F x ; 0 0 ha al massimo grado n, quind per il teorema fondamenta le dell' algebra , le equazioni F x ; mx q 0 e F x ; 0 0 hanno al mass n solu cioè la retta interseca la curva al massimo n volte. 15 Teorema fondamentale dell’algebra: un’equazione di grado n 1 ammette n radici, reali o complesse, ciascuna contata con la propria molteplicità. In particolare le soluzioni reali sono al massimo n (pensa all’equazione di 2°grado e alle considerazioni su ). 2^ proprietà Curve passanti per l’origine. Il punto P(x0;y0) appartiene alla curva F(x;y) = 0 se e solo se F(x0;y0) = 0 , in particolare il punto O(0;0) appartiene alla curva se e solo se F(0;0) = 0. Ne segue che, la curva di equazione F(x;y) = 0 passa per l’origine O(0;0) se e solo se nell’equazione manca il termine noto. Prendiamo, per esempio, l’equazione di 2° grado di una conica: 2 2 ax bxy cy dx ey f 0 ; il punto O(0;0 appa alla cur se e sol se f 0 . 3A proprietà Simmetria di una curva rispetto agli assi e rispetto all’origine. Consideriamo i seguenti tre casi di simmetria: 1° la curva è simmetrica rispetto all’asse y se e solo se nel polinomio F(x;y) la x compare solo al grado pari; si ha F(-x;y) = F(x;y); 2° la curva è simmetrica rispetto all’asse x se e solo se nel polinomio F(x;y) la y compare solo al grado pari; si ha F(x;-y) = F(x;y); 3° la curva è simmetrica rispetto all’origine del riferimento cartesiano se e solo se nel polinomio F(x;y) la x e la y compaiono solo al grado pari , oppure solo al grado dispari e manca il termine noto; si ha F(-x;-y) = ± F(x;y) . 16 Considerazioni conclusive relative alle simmetrie per le coniche Dopo aver osservato che se b 0, allora manca il termine rettangola re in 'xy' egli assi di simmetria sono paralleli agli assi del riferiment ocartesiano , consideria mo iseguenti casi : d 0 , e 0 manca il termine di primo grado in 'x' , allora la curva èsimmetrica rispetto 2 2 2 all' asse y , infatti ax cy ey fa( x )2 cy ey f, cioè F( x ;y) F (x ;y) ; e 0 , d 0 manca il termine di primo grado in 'y' , allora la curva èsimmetrica rispetto b 0 e d e 0 2 2 2 all' asse , xinfatti ax cy dx fax c ( y )2 dx f, cioè F(x ; y) F (x ;y) ; xed ycompaiono solamente al secondo grado , allora la curva èsimmetr rispetto all' origine del riferiment ocartesiano , 2 2 infatti ax cy fa( x )2 c ( y )2 f, cioè F( x ; y) F (x; y) . 17 18 LE CONICHE COME LUOGHI GEOMETRICI 1. Definizione generale di conica mediante l’eccentricità Si dice conica il luogo dei punti P del piano per i quali è costante il rapporto fra la distanza di P da un punto fisso F, detto fuoco, e quella da una retta fissa d, non passante per P, detta direttrice : PF e con e R PH Il numero e si chiama eccentricità della conica. Si dimostra che : • per l’ellisse 0 e < 1 ( e = 0 circonferenza di raggio nullo – la conica degenera in un punto) • per la parabola e = 1 • per l’iperbole e > 1 19 Dalla geometria all’algebra Dalla definizione generale di conica, come luogo geometrico, deduciamo l’equazione algebrica generale delle coniche, inserendo nel piano un opportuno riferimento cartesiano ortogonale. PF e, coneR costante . PH Scelto unopportuno riferiment o cartesiano , i punti interessat i hanno leseguenti coordinate : Dalla definizion e diluogo geometrico siha: coincident e con ilcentro delrif. cart. F0;0 fuoco, generico appartenen tealla conica -luogo geometrico Px;y punto Hd;y proiezione diP sulla direttrice d,diequazione xd . x2 y2 e, condx dx PF Dalla geometria all' algebra : e PH x2 y2 edx 1-e x y 2e dxe d 0 2 2 2 2 2 2 (*) . L’equazione (*) è di secondo grado in x e y, cioè la tipica equazione delle coniche, precisamente del tipo: 2 2 ax cy dx f 0 (vedi 2 esempio ) . 20 2 2 Osservazio ni dal confronto fra l' equazione ax cy dx f 0 2 2 con l' equazione generale ax bxy cy dx e y f 0 : b 0manca iltermine in 'xy' perchè gli assi di simmetria sono paralleli agli assi cart in questo caso si ha : e 0manca iltermine in 'y' perchè l' asse è x asse di simmetria . 22 2 2 22 2 2 per e 0 l' equazione (*) diventa :1 e x y 2 e dx e d 0 x y 0 ,equazion della circ di raggio nullo, cioè verificat a solamente dal punto F O 0;0 ,pertanto il luogo geometrico così defini esclude la circonfere nza reale ( vedi 1 esempio ). Si osserva inoltre che, altendere dell' ecentricit à 'e' a zero l' ellisse tende a diventare una circonfere nza . 1o Esempio Rappresent azionegraficadelle curve di equazione x2 y2 e , con d x , dx direttrice d 1 nel caso in cui F0 ; 0 coordinatedel fuoco e per i seguentivaloridell'eccentrici tà e , tutti con 0 e 1 per ottenereuna serie di ellissi: e 0,5; e 0,25; e 0,125; e 0,05; e 0,025; e 0,0125; e 0,005. 21 2 o Esempio Rappresent azione grafica delle curve di equazione x 2 y2 e , con d x , dx nel caso in cui direttrice d 1 F0 ; 0 coordinate del fuoco e per i seguenti valori dell' eccentrici tà e : e 0,5 e 1 e 2 0 e 1 e 1 ellisse parabola iperbole 22 2. Definizioni specifiche di conica • Circonferenza - Si dice circonferenza il luogo geometrico dei punti P del piano equidistanti da un punto C, detto centro. La distanza costante PC si chiama raggio della circonferenza. • Parabola - Si dice parabola il luogo geometrico dei punti P del piano equidistanti da un punto F, detto fuoco, e da una retta d, detta direttrice. • Ellisse - Si dice elisse il luogo geometrico dei punti P del piano tali che sia costante la somma delle distanze di P da due punti distinti F1 ed F2, detti fuochi. • Iperbole - Si dice iperbole il luogo geometrico dei punti P del piano tali che sia costante la differenza delle distanze di P da due punti distinti F1 ed F2, detti fuochi. Dalla geometria all’algebra Da queste definizioni specifiche, dedurremo, nei capitoli seguenti, le equazioni algebriche delle coniche, inserendo nel piano opportuni riferimenti cartesiani ortogonali. 23 24 LO STUDIO DI UNA CONICA Studiare una conica significa: 1. classificare la conica analizzando la sua equazione; 2. trovare gli elementi caratteristici (vedi pagina precedente); 3. disegnare il grafico. Esempi In questo contesto non ci occupiamo delle coniche con il termine ‘xy’ e, per tracciare il grafico, ci limitiamo a determinare solo alcuni elementi caratteristici: centro e assi di simmetria, vertici. 2 2 1. Studia la conica 4x y 24 x 4 y 36 0 Classifica zione 4 012 M 0 1 2 det 4 ( 36 -4) 12 (-12) 128 144 16 0 ; 4 0; 16 5 80 0 12 2 36 poichè det(M) 0 , la conica non èdegenere ; conclusion i: poichè 0e 0, la conica èun' ellisse reale. Osserviamo che manca il termine rettangola re in 'xy' ,cioè b 0eche quindi gli assi di simmetria sono paralleli agli assi cartesiani . 25 Elementi caratteris tici Cerco il centro di simmetria C(x la traslazi onecheportaC nell' origine O(0;0) : 0;y0) imponendo ( N.B. b0 assidisimmetria paralleli agliassicartesiani , quindi se il centro di simmetria coincide conl'origine delrif.cart. , alloramancano i termini di primo gradotanto in 'x', quanto in 'y'; vedi pag.16.) x xT x0 4xT x02 yT y02 24xT x04yT y0360; yyT y0 2 2 4xT yT 8x0 24 xT 2y0 4yT 4x02 y02 24x 0 4y 0 360; Dallacondizione di annullamen to dei termini di primo grado deduciamo le coordinate delcentro di simmetria C e le equazioni degliassidi simmetria r, s: 8x0 240 x0 3 , C-3;-2 2y0 40 y0 2 r: x3 , s: y2 . Cerco le coordinate dei vertici : 4x2 y2 24x4y360 x2 6x80 x1 4; x2 2 V14;2; V22;2; y 2 y 2 y 2 4x2 y2 24x4y360 y2 4y0 y 4; y2 0 1 V33;4; V43; 0; x 3 x 3 x 3 26 Osserva che un’ellisse è sempre inscritta in un rettangolo, come appare in figura, quindi, per tracciare il grafico della conica, note le coordinate dei vertici, è utile prima rappresentare il rettangolo. Infine, per rendere il disegno più preciso, si può determinare qualche altro punto: 2 2 2. Studia la conica 2x y 6 x 5 y 3 0 Classifica zione 20 3 det M 0 1 5 / 2 2 ( 3 25 / 4 ) 3 3 5 / 2 0 ; 3 5 / 23 2 0 ; det(M) 0 la conica non è degenere ; conclusion i : 0 la conica è un' iperbole con gli assi di simm. paralleli agli assi cartesi ( b 0 ). 27 Elementi caratteris tici Cerco il centro di simmetria C(x la traslazi onecheportaC nell' origine O(0;0) : 0;y0) imponendo x xT x0 2 2 2xT x0 yT y0 6xT x05yT y030; yyT y0 2xT2 yT2 22x0 3 xT 2y0 5yT 2x02 y02 6x0 5y0 30; Dallacondizione di annullamen to dei termini di primo grado deduciamo le coordinate delcentro di simmetria C e le equazioni degliassidi simmetria r, s: 2x0 30 x0 3/2 , C3/2;5/2 2y 5 0 y 5/2 0 0 r: x3/2, s: y5/2. Cerco le coordinate dei vertici : 12 104 2x2 y2 6x5y30 8x2 24x130 x1,2 ; V20,2;5/2; V12,8;5/2 8 y 5/2 y 5/2 y5/2 L'iperbole ammette solodue vertici , quindi il secondo sistema nondeveavere soluzioni, infatti : Δ sol. 2x2 y2 6x5y30 2y2 10y150 50 nessuna 4 x 3/2 x 3/2 x -3/2 28 Per tracciare in modo più preciso un’iperbole sarebbe necessario tracciare gli asintoti, ma in questa fase accontentiamoci di fare una ‘bozza’ del grafico. Rendiamo il disegno accettabile determinando qualche altro punto: 2 3. Studia la conica y x y 6 0 Classifica zione 0 0 1 / 2 11 1 det M 0 1 1 / 2 ( ) 0 ; 22 4 1/2 1 / 2 6 0 ; det(M) 0 la conica non è degenere ; conclusion i : 0 la conica è una parabola con l' asse di simm. parallelo ad uno degli assi cart. (b 0 ). 29 Elementi caratteris tici La parabolanon ha centrodi simmetria, tuttav ia è possibiletrovarele coordinate del verticeV(x0; y0 ), usandoancorail metododella traslazi one,che porta V(x0; y0 ) nell'origineO(0;0) : x xT x0 y yT y0 yT y0 2 xT x0 yT y0 6 0; yT2 xT 2y0 1 yT y02 x0 y0 6 0; Dallacondizione di annullamen to dei termini di primogrado,deduciamo che: si può annullare solamente il termine in ' y', per y0 1/2, quindil'assedi simmetria è paralleloall'asse' x' ( F(x;-y) F(x;y)); y 1/2 è l'assedi simmetria e l'ordinatadel vertice . Determinia mo l'ascissadel vertce : y2 x y 6 0 x 25/ 4 0 y 1/ 2 y 1/ 2 V25/4;1/2 , r : y 1/2 . y2 x y 6 0 y2 x y 6 0 B(0;-2) Intersezio ne con gli assi cartesiani : A6;0 ; C(0; 3) y 0 x 0 30 2 2 4. Studia la conica 4 y x 16 y 16 0 Classifica zione 1 0 0 M 0 det 4 8 1 ( 64 64 ) 0 ; 0 8 16 poichè det(M) 0 , la conica èdegenere eil polinomio aprimo membro dell' equazione può essere scompo in fattori : 2 2 x ( x 4 y 16 y 16 ) 0 2 ( x 2 y 4 ) 0 x 2y 4 2y 4 0 ; l' equzione è verifica ta da 2y x 4 0 o 2y x 4 0 , che sono le equazioni di due rette incident nel punto A(0 ;-2) : 2 x 2y 4 0 x 0 x 2y 4 0 y -2 . 31 RETTE TANGENTI AD UNA CONICA CONDOTTE DA UN PUNTO Per determinare le equazioni delle tangenti ad una conica condotte da un punto P(x p;yp), si applicano in generale o il metodo del discriminante nullo o il metodo delle formule di sdoppiamento. In casi particolari, come per la circonferenza, si possono applicare altri metodi più comodi. Metodo del discriminante nullo - = 0 1. 2. 3. 4. si scrive l’equazione del fascio di rette con centro in P; si scrive il sistema formato dalle equazioni del fascio e della conica; si trova l’equazione risolvente di 2° grado in una delle due incognite; si impone la condizione di tangenza = 0 per calcolare il coefficiente angolare delle due tangenti (sarà una sola, se P appartiene alla conica, nessuna soluzione se P è interno alla conica). 32 Esempio Dopo aver classificato la conica di equazione x 2 + y2 - 8x - 4y + 10 = 0 , determina le equazioni delle rette ad essa tangenti e passanti per il punto P(-1 ; 7). 1 0 4 x y 8x 4y 10 0 ;det M 0 1 2 1 (10 4) 4 4 10 0 ; 1 0 ; 4 2 10 22 conclusion i : det(M) 0 la conica non è degenere; 0 la conica è un' ellisse, in particol e è una circonfere nza perchè b 0 e a c. Verifichiamo ora se il punto P appartiene alla conica: 1 + 49 + 8 - 28 + 10 = 40 0, P non appartiene alla conica, pertanto l’equazione =0 può avere due soluzioni (due tangenti) o nessuna soluzione (nessuna tangente). x ; ymx 1 . equazione del fascio di centro P(-1;7) :y -7 m 1 m 7 ; y mx m 7 2 2.2 2 2 x (mx m 7) 8 x 4 (mx m 7) 10 0 ; x y 8 x 4 y 10 0 3 . 22 2 2 x m x m 49 2 m x 14 mx 14 m 8 x 4 mx 4 m 28 10 0 ; 2 2 2 2 2 ... 1 m x 2 m 5 m 4x m 10 m 31 0 ; 5 25 9 2 4. 0 ; ... 3 m 10 m 3 0 ; m ; 1,2 4 3 m 3 1 . m 1 3 2 Conclusion e : le rette tangenti , condotte dal punto P, sono :y -3x 4e 1 20 y -x . 3 3 33 Metodo delle formule di sdoppiamento Data l’equazione di una conica espressa in forma normale 2 2 ax bxy cy dx ey f 0 e un punto P(xP ; yP), si sostituiscono alle variabili x e y dell’equazione della conica le seguenti espressioni: x x P x ; 2 xx ; x P 2 y y 2 P y ; y yy ; fatta la sostituzio ne si ottiene l' equazione di una retta . P 2 y y x x P P xy ; 2 A questo punto, considerato il significato geometrico della retta , si presentano tre casi: 34 1° P è esterno alla conica la retta è la retta polare e interseca la conica nei due punti di tangenza A e B delle due rette tangenti, r ed s, cercate; 2° P appartiene alla conica la retta è la retta tangente cercata; 3° P è interno alla conica la retta non interseca la conica, o non esiste se P coincide con il centro di simmetria della conica. Esempio Consideriamo la circonferenza dell’esempio precedente, di equazione x 2 + y2 - 8x - 4y + 10 = 0 , e troviamo le equazioni delle rette ad essa tangenti, condotte da un punto P, nei seguenti tre casi: 1° 2° 3° 4° 1 P(-1 ; 7) è esterno alla circonferenza; P(2;5) appartiene alla circonferenza; P( 2; 4) è interno alla circonferenza e non coincide con il centro di simmetria; P(4; 2) è il centro di simmetria della circonferenza. ; P 1;7 x 1y 7 applico le formule di sdoppiamen to x 7y 8 4 10 0 ; 2 2 2 2 x y 8 x 4 y 10 0 x 7y 4x 4 2y 14 10 0 ;5x 5y 0 ;y xèla retta polare . 2 2 x y 8 x 4 y 10 0 2 2 Trovo ipunti A eB ditangenza : x x 8x 4x 10 0 ; 26x x 5 0 ; y x x 1 ; B ; 3 9 x 5 ; 1 A 1;1 5;5 1,2 x 5 2 ; y Tangente rpassante per P eA : coeff. ang. m 1 7 1 1 -3 ;y 7 3 x 1 3 x 4 ; 1 1 1 20 ; y Tangente spassante per P eB : coeff. ang. m 5 7 5 1 -; y 7 x 1 x . 3 3 3 3 35 2 P4 6;0; 4x6-4x -16 -4 6-2y 10 0; 3 x4 6 y applico leformule di sdoppiamen to 4 x 6-8 -4 10 0; 2 2 2 2 x y 8 x4 y 10 0 2;4; P y 6 x-32 6 èla retta tangente . 2 x2 y4 applico leformule di sdoppiamen to2x 4y -8 -4 10 0; 2 2 xy 8 x4 y 10 0 2 2 2x 4y -4x -8-2y -8 10 0; -2x 2y -60; yx 3 èlaretta . yx 3 2 Verifico che non interseca laconica : 2 2 2x 6 x70; 50, 4 x y 8 x4 y 10 0 quindi nessuna soluzione reale. 4 4;2; P x4 y2 applico le formule di sdoppiamen to 4x 2y 8 -4 10 0; 2 2 2 2 x y 8 x4 y 10 0 4x 2 y-4x -16 -2y -4 10 0; -10 0, scrittura assurda , quindi non esiste laretta . 36 Esercizi Determina le equazioni delle tangenti alla conica di equazione assegnata, condotte dal punto P: a. 2 x 2x – y – 1 0 P(2,3) applicare ilmetodo del discrimina nte nullo Verifico se Pappartiene alla conica : 4 4 -3 -1 2 0 Pnon appartiene alla conica. x-2 ; ymx 1.equazione del fascio di rette di centro P(2;3) :y -3 m -2m 3 ; y mx -2m 3 2.2 2 x 2x (mx -2m 3 ) 1 0 ; x 2x – y – 1 0 3. 2 x (2 m)x 2m 4 0 ; m 2 2 4.Δ 0 ; ... m 12m 20 0 ; m 6 16 ; 1 1,2 m 10 2 Conclusion e : le rette tangenti ,condotte dal punto P, sono :y 2x 1e y 10x 17 . 2 2 b. 5x – y 6xy 4y 1 0 P(1, – 2)applicare le formule di sdoppiamen to Verifico se P appartiene alla conica : 5 4 12 8 19 0 P alla conica. 2x y y 2 Applico le formule di sdoppiamen to : 5x 2y 6 4 1 0 ; 2 2 5x 2y 6x 3y 2y 4 1 0 ; x 7y 3 0è la retta τ . 2 2 5x – y 6xy 4y 1 0 Trovo ipunti A e B ditangenza : x 7y 3 0 37 2 1 43y 112y 23 0con 0, quindi la retta non interseca la conica e non esistono tangenti condotte da P . P è interno alla conica. c. 2 x xy y 3y 0 P(0 ;0) Applicare entrambi i metodi. 2 Verifico se Pappartiene alla conica : 0 0 Pappartiene alla conica. Metododelleformuledi sdoppiamen to x0 x 0 y 0 y0 y 0 3 0 ; 2 2 3 y0 ; 2 y 0 è la retta tangente . Metododel discrimina nte nullo y mx 2 2 x xy y 3y 0 x2 mx2 m2x2 3mx 0 ; m m 1 x2 3mx 0 ; 9m2 0 m 0 ; quindiy 0 è la retta tangente . 2 38 Esercizi di riepilogo Classifica le coniche seguenti, disegnale (solo se manca il termine in ‘xy’) e trovane le tangenti condotte dal punto P. 1. 5x2 + 5y2 – 11xy + 1 = 0 P(1;1) iperbole ruotata - tang: y = – x + 2 2. x2 + y2 – 3x – 7y + 12 = 0 P(– 1;6) circonferenza - tang: 3x + y – 3 = 0 ; x + 3y – 17 = 0 3. 4x2 – 4xy + y2 + 6x + 1 = 0 P(0;0) parabola ruotata - tang.: y = – x ; y = 5x 4. x2 – 2y2 – 2y – 1 = 0 P(0;0) iperbole 5. 4x2 + y2 – 4y + 2 = 0 P(0;0) ellisse 6. x2 + 2xy – 2x – 6y + 1 = 0 P(1;0) iperbole ruotata - tang: y = 0 . - tang.: y=±x - tang.: y = ± 2x 39
Scarica