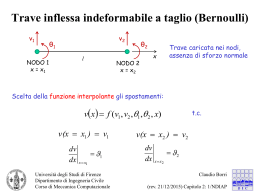
Claudio Borri MECCANICA COMPUTAZIONALE Lezione 2 TITOLO Rev. 21 dicembre 2015 Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 1/NDIAP Sommario SOMARIO Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 2/NDIAP Problema elastostatico (continuo 3D) Il problema elastostatico è caratterizzato dai tre gruppi di equazioni definiti in ogni punto del continuo 1 ui u j Congruenza: ij 2 x j xi Legame: Equilibrio: ij ij xi E 1 kk ij ij 1 2 in V bj 0 Cui si aggiungono le condizioni al contorno: c.c. statiche ij n j tˆi su S t c.c. cinematiche ui rˆi su S r Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 3/NDIAP Notazione computazionale In meccanica computazionale si è soliti raccogliere spostamenti, deformazioni e sforzi nei vettori: b1 b b2 b3 11 22 33 σ 12 23 31 1 2 3 ε 12 23 31 u1 u u2 u3 tˆ1 tˆ tˆ2 tˆ 3 rˆ1 rˆ rˆ2 rˆ3 Si noti come anche i tensori del secondo ordine di sforzi e deformazione vengano rappresentati in vettori colonna. Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 4/NDIAP Problema in notazione computazionale congruenza: ε cin u legame: equilibrio: sta T cin 1 0 0 2 0 3 c.c. statiche: σ Eε c.c. cinematiche: R cin u rˆ sta σ b 0 0 2 0 1 3 0 0 0 3 0 2 1 1 0 0 2 0 3 R sta 0 2 0 1 3 0 0 0 3 0 1 2 Rsta σ tˆ su St 0 1 1 0 1 0 1 2 0 E 0 0 E 2 1 1 2 0 0 0 0 1 0 0 0 0 0 0 R cin 0 1 0 0 0 1 Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale 0 0 0 0 1 2 2 0 Claudio Borri (rev. 21/12/2015) Capitolo 2: 5/NDIAP su Sr 0 0 1 2 2 0 0 0 Diagramma di Tonti spostamenti u b EQUILIBRIO R cin u rˆ CONGRUENZA sta σ b 0 ε cin u LEGAME sforzi generalizzati σ Rsta σ tˆ ε σ Eε deformazioni generalizzate condizioni al contorno statiche Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 6/NDIAP condizioni al contorno cinematiche carichi esterni Problema unidimensionale (asta) È possibile generalizzare la notazione matriciale utilizzando la stessa scrittura per differenti problemi strutturali. Ad esempio per il caso unidimensionale della biella, i vettori (con una sola componente) sono: b qx σ N ε x qx N̂ u u x tˆ Nˆ rˆ uˆx N̂ x e le matrici relative sono banalmente: d sta T cin E EA dx Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Rsta 1 Rcin 1 Claudio Borri (rev. 21/12/2015) Capitolo 2: 7/NDIAP Trave piana rigida a taglio qx b qy N σ M qy x y ε u x u u y Nˆ ˆt Tˆ ˆ M uˆx rˆ uˆ y ˆ qx ux uy f Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale sta cin T N T M d x 0 0 d x2 A 0 EE 0 J Claudio Borri (rev. 21/12/2015) Capitolo 2: 8/NDIAP Trave piana deformabile a taglio qx b qy m qy x y ε N σ T M qx u x u u y m sta T cin ux uy f Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Nˆ ˆt Tˆ ˆ M N T M d x 0 0 uˆx rˆ uˆ y ˆ 0 dx 0 0 1 d x2 0 EA 0 E 0 GAs 0 0 0 EJ Claudio Borri (rev. 21/12/2015) Capitolo 2: 9/NDIAP Problema piano (di tensione) Per il problema piano di tensione (che verrà meglio analizzato nel cap. 4), si ha: qx b qy nxx σ n yy n xy xx ε yy xy u x u u y uˆn rˆ uˆt pˆ n tˆ pˆ t p̂n 0 0 1 sta T cin qx x 1 Eh E 1 1 2 0 0 p̂t qy y 2 x2 R sta x y Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale y2 x2 y2 2 x y x y x 0 y 0 y x x y R cin x y Claudio Borri (rev. 21/12/2015) Capitolo 2: 10/NDIAP Piastra (o lastra inflessa) rigida a taglio (teoria di Kirchhoff-Love) mxx σ mxx mxy b qz xx ε yy 2 xy u u z x y n z qz z tx Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale sta T cin h t mxy tˆ tˆ mˆ uˆz rˆ ˆt xx yy 2 xy 1 0 3 Eh E 1 0 12(1 2 ) 1 0 0 2 Claudio Borri (rev. 21/12/2015) Capitolo 2: 11/NDIAP Energia potenziale totale EPT u 1 εuT σ u dV u T b dV u T tˆ dA V St 2 V Il pedice “u” indica che si tratta di un funzionale in cui la variabile indipendente sono gli spostamenti (deformazioni e tensioni sono assunti in funzione di questi tramite congruenza e legame). Nella formulazione agli spostamenti del FEM è questo il funzionale che utilizzeremo. È possibile scrivere funzionali analoghi dove le variabili indipendenti sono gli sforzi (metodo delle forze): • energia potenziale complementare Per problemi specifici si ricorre inoltre alle formulazioni miste con l’assunzione di più variabili indipendenti: • potenziale di Hellinger-Reissner (spostamenti e sforzi) • potenziale di Veubeke-Hu-Washizu (spostamenti, deformazioni e sforzi) Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 12/NDIAP
Scaricare