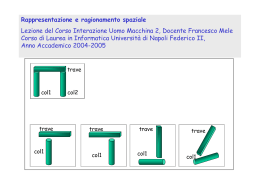
Presentazione del corso Informatica per il Design Generativo Facoltà di Architettura SUN AA 2007-2008 Docente Francesco Mele [email protected] Argomenti delle lezioni 1- Dalle rete semantiche alle ontologie 2 - Introduzione alle Ontologie 3 – Protegé (uno strumento per la creazione e l’editing di ontologie) – alcuni plugins 4 - Creazioni di ontologie per modelli di artefatti 5 - Rappresentazione di relazioni spaziali quantitative e qualitative. Ragionamento spaziale; 6 – Rappresentazione di vincoli – il plugin PAL (Protegé Axiom Language) 7 - Introduzione alla rappresentazione e al ragionamento funzionale 8- Progettazione generativa formale di artefatti. 9- Visualizzazione di modelli di artefatti 10 - Progetto per la costruzione di un modello generativo di artefatti Ontologie basate su frame Frame (classe) Dimensione verticale Bene culturale Istanza Slot “E’ un” “Sottoclasse di” “Sottoclasse di” Monumento “Sottoclasse di” nome tipo Statua Parte di Chiesa Altare Parte di Statua_di_Dante Abside “E’ un” Stile Gotico Chiesa di S. Chiara Altare_di_S-Chiara “E’ un” Abside_S-Chiara Dimensione orizzontale Stile, “Parte di”, “Autore_di” L’ontologia di preziosi L’ontologia dei bicchieri Glasies flutes ballons Low Ballons High Ballons cocktails Champagne Tumblers Low Tumbler Medium Tumbler High Tumbler Classi di unità tecnologiche, unità tecnologiche e classi di elementi tecnici (UNI 8290) rappresentate come classi di un’ontologia formale Classi di unità tecnologiche rappresentate mediante un formale (Protegé) Classi di unità tecnologiche e Parti Totalità Edificio edx A D B E parte_di(ppv1, edx) La parete perimetrale ppv1 fa parte dell’edificio edx C ppv1 parte_di(P, T):- formato_da(T.P). format_da(T.P):formato_da(T,T1), formato_da(T1,P). Oggetti composti in rappresentazioni ontologiche Travex Cx Cy Classi di ontologie come modello generativo (1) Variando dimensioni trave col1 col2 Classi di ontologie come modello generativo (2) Variando relazioni RELAZIONI SPAZIALI QUALITATIVE r1:sotto[obj1->col1,obj2->trave]. r2:sotto[obj1->col2,obj2->trave]. r3:incontra[obj1->col1,obj2->trave]. r4:incontra[obj1->col2,obj2->trave]. r5:estremitaDx[obj1->col2,obj2->trave]. r6:estremitaSx[obj1->col1,obj2->trave]. trave col1 col2 L’ontologia in Protégé path side section wedding-ring angle Un esempio di relazione formed_by part-of Modelli cognitivi di progettazione- agenti razionali Assunzione della teoria rappresentazionale della cognizione Le credenze, desideri ed altri atteggiamenti preposizionali sono stati relazionali. Avere una credenza o un desiderio dotati di un particolare contenuto, vuol dire avere nella mente un’occorrenza (token) di una rappresentazione dotata di quel contenuto immagazzinata nella mente nel modo funzionalmente opportuno (Shaun N., Stich S.) MENTE Credenza Desiderio token token domani piove domani non piove Assunzione di base per la rappresentazione La mente contiene due differenti tipi di stati rappresentazionali, credenze e desideri. (Shaun N., Stich S.) Le credenze sono create/causate generalmente in maniera diretta dalla percezione I desideri/scopi sono generati da credenze e scopi preesistenti Credenze Desideri • domani piove • domani non • la juve gioca bene • andare al mare piove Modelli cognitivi di progettazione - agenti razionali Beliefs Goals Goals Belief model artefact_state Rendering Revision New goals New beliefs New model ? Ciclo di progettazione Beginning cycle Goals Model Feedback 3D rendering not satisfactory appraisal Artefact not satisfactory appraisal satisfactory appraisal End cycle Model generation cycle Ontologie e ragionamento spaziale trave col1 trave col1 col2 trave col1 trave col1 trave col1 Tipi di relazione part-whole /olonomia-meronomia • Componente - Oggetto (ramo/albero, altare/chiesa,..,); • Membro - Collezione (albero/foresta, quadro_x/collezione_quadri,..,) • Porzione - Massa (fetta, torta) • Materiale - Oggetto (alluminio/aereoplano) • Caratteristica - Attività (pagamento/shopping) • Sito - Area (Roma-Lazio) • Fase - Processo (adolescenza-crescita) Possono essere ridotti a quattro (IRIS) • funzione - parte (Fase-Processo, Caratteristica-Attività) • segmenti - parte (Componente-Oggetto, Sito-Area) • collezione - membro (Componente-Oggetto, Materiale-Oggetto) • sottinsieme - insieme (Porzione - Massa) RELAZIONI PARTE-TOTALITA’ Winston, Chaffin e Hermann hanno proposto le relazioni chiamate WCH, definendo sei diversi tipi di relazioni. Tali relazioni sono distinguibili sulla base di tre criteri: funzionalità, omogeneità, separabilità. Componente/Oggetto: definisce la relazione tra oggetti composti e le loro parti. Le parti sono separabili ed hanno una loro funzionalità, per esempio altare/chiesa. Membro/Collezione: definisce la relazione di appartenenza ad una collezione. I membri non hanno un ruolo funzionale nella collezione e possono essere pertanto separati, ad esempio albero/foresta, colonna/colonnato. Porzione/Massa: definisce la relazione di aggregati omogenei. La massa è considerata come un insieme di parti aventi le stesse caratteristiche, e tali parti sono dello stesso tipo della totalità a cui appartengono e non sono separabili. Per esempio come visto precedentemente, fetta/torta. Materiale/Oggetto: definisce la relazione tra oggetti e il materiale di cui sono fatti. In questo caso il materiale non può essere separato dall’oggetto, non ha funzionalità e non è omogeneo. Per esempio acciaio/bici. Caratteristica/Attività: definisce la fase di un’attività. La fase, come un componente, ha una suo ruolo funzionale ma non è separabile. Per esempio pagamento/shopping. Sito/Area: definisce una relazione spaziale tra regioni occupate da differenti oggetti. Come porzione/massa, sito/area è omogenea, poiché ogni parte della regione è simile nella sostanza all’intera regione, ma essa non può essere separata, per esempio oasi/deserto. Meronomie /Olonomie Rappresentazioni Spaziali Part-Whole Tre principali categorie per le relazioni spaziali • Relazioni topologiche; • Relazioni direzionali; • Relazioni di prossimità Una classificazione delle relazioni spaziali Relazioni topologiche B è dentro A A copre B A A B A è equivalente aB B A incontra B B A A B A disgiunto B B sovrappone A A A B B INDETERMINATEZZA DELLE RELAZIONI SPAZIALI QUALITATIVE (1) trave col1 OGGETTO COMPOSTO portale [...formato_da->>{trave, col1, col2}, relazioni_spaziali->>{r1, r2, r3, r4, r5, r6} ...] col2 AD ESEMPIO LA RELAZIONE SPAZIALE QUALITATIVA: r1:sotto[obj1->col1,obj2->trave]. trave col1 trave col1 trave col1 trave col1 INDETERMINATEZZA DELLE RELAZIONI SPAZIALI QUALITATIVE (2) trave col1 OGGETTO COMPOSTO portale [...formato_da->>{trave, col1, col2}, relazioni_spaziali->>{r1, r2, r3, r4, r5, r6} ...] col2 AD ESEMPIO LA RELAZIONE SPAZIALE QUALITATIVA: r3:incontra[obj1->col1,obj2->trave]. trave col1 trave trave col1 col1 trave col1 Relazioni di prossimità Rappresentano relazioni di distanza fra gli oggetti: possono essere qualitative e quantitative Qualitative: Quantitative: l’edificio rosso si trova nei pressi (vicino/a pochi passi, etc) dall’edificio azzurro l’edificio rosso si trova a quindici metri dall’edificio azzurro Relazioni direzionali Ad esempio Longitudine, Latitudine Oppure qualitative del tipo: Parti connesse e parti proprie Una domanda di interesse teorico: un individuo è uguale alla somma delle sue parti? Oggetti composti in rappresentazioni ontologiche Travex Cx Cy ISTANZE DI OGGETTI COMPOSTI: Descrizioni qualitative + Descrizioni quantitative + Regole di inferenze (I) trave OGGETTO COMPOSTO portale [...formato_da->>{trave, col1, col2}, relazioni_spaziali->>{r1, r2, r3, r4, r5, r6} ...] col1 col2 RELAZIONI SPAZIALI QUALITATIVE r1:sotto[obj1->col1,obj2->trave]. r2:sotto[obj1->col2,obj2->trave]. r3:incontra[obj1->col1,obj2->trave]. r4:incontra[obj1->col2,obj2->trave]. r5:estremitaDx[obj1->col2,obj2->trave]. r6:estremitaSx[obj1->col1,obj2->trave]. Descrizioni qualitative Classi di ontologie come modello generativo (1) Variando dimensioni trave col1 col2 Classi di ontologie come modello generativo (2) Variando relazioni RELAZIONI SPAZIALI QUALITATIVE r1:sotto[obj1->col1,obj2->trave]. r2:sotto[obj1->col2,obj2->trave]. r3:incontra[obj1->col1,obj2->trave]. r4:incontra[obj1->col2,obj2->trave]. r5:estremitaDx[obj1->col2,obj2->trave]. r6:estremitaSx[obj1->col1,obj2->trave]. trave col1 col2 Modelli di artefatti come gerarchia di relazioni spaziali Strategia per il design generativo Definizione del modello dell’artefatto (totalità) mediante aggregazione di parti Definizioni delle parti mediante classi 1- individuazione della classe di studio 2- individuazione delle parti 3- individuazione delle relazioni spaziali fra le parti 4- individuazione dei vincoli sulle parti Istanziazione delle parti della totalità Verifica dei vincoli Rendering del modello
Scaricare