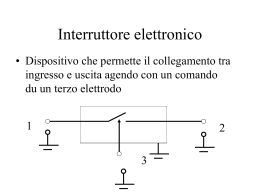
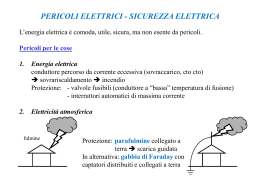
R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ROBO LT Beginner Lab ROBO LT Controller Alimentazione ROBO Pro Light Installazione ROBO Pro Light e Driver USB Inizia a programmare con ROBO Pro Light Giostra – Programmazione di Base Semaforo Pedonale Faro con Luce Lampeggiante Frigorifero Lavatrice Porta Scorrevole Illuminazione Vano Scala Tergicristalli Se qualcosa non funziona... ITA Contenuti ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà "Ciao, prima di tutto lascia che mi presenti: sono la tua Guida fischertechnik e ti accompagnerò attraverso le prossime pagine, dandoti consigli e informazioni utili.” ROBO LT Beginner Lab Componenti "Innanzitutto vorrei mostrarti i più importanti componenti che sono contenuti in ROBO LT Beginner Lab, e darti alcune informazioni tecniche al riguardo." Blocchi di costruzione Vi sono vari elementi di costruzione che ti permetteranno di comporre i modelli proposti. La figura qui sotto ne mostra una parte. Componenti Elettrotecnici Assomigliano molto ai normali blocchetti di costruzione e possono essere assemblati con essi. Lavorano con la corrente elettrica. A seconda della loro funzione, sono chiamati attuatori o sensori. Attuatori Sono chiamati attuatori perché sono elementi “attivi”, che fanno qualcosa: sono componenti come un motore o una spia, che funzionano finché sono alimentati dalla corrente elettrica. Il motore gira e la spia si illumina. Lampadina Simbolo Circuito La lampadina è una fonte di luce artificiale. In essa, un conduttore elettrico è riscaldato dall’energia elettrica ed è questo che fa illuminare la lampadina. Il set include due differenti tipi di lampadine: una lampadina a incandescenza e una lampadina a incandescenza lenticolare. Nella lampadina a incandescenza, la luce che viene emessa è dispersa. La luce della lampadina a incandescenza lenticolare è invece focalizzata in un punto da una lente. Questo tipo di luce è utilizzata, ad esempio, per le fotocellule. Luce a Luce lenticolare a incandescenza incandescenza R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ITA Motore XS Il motore a corrente continua converte l’energia elettrica in energia meccanica. Ciò comporta il movimento di rotazione del motore. Il motore ha anche un cambio con il quale è possibile ridurre la velocità del motore. M Simbolo Circuito Sensori I sensori, come gli interruttori a pulsante o i fototransistor, sono componenti che permettono di controllare gli attuatori. Per esempio, un motore può essere acceso o spento con un interruttore. Interruttori a pulsante Gli interruttori a pulsante fanno parte della categoria dei sensori di contatto. Se premi il pulsante rosso, un contatto è mosso meccanicamente nel telaio e la corrente elettrica scorre tra le connessioni 1 e 3. Contemporaneamente il contatto tra le connessioni 1 e 2 viene interrotto. 3 1 2 Simbolo Circuito Perciò, puoi utilizzare l’interruttore a pressione in due modi diversi: Come un interruttore di “chiusura”: 3 Il contatto 1 e il contatto 3 sono connessi. L’interruttore a pulsante viene 1 premuto: l’elettricità scorre. L’interruttore a pulsante non è premuto: nessun flusso di energia elettrica. 2 La figura illustra lo schema dei contatti che si ha quando l’interruttore viene premuto. Come un interruttore “di apertura”: 3 I contatti 1 e 2 sono connessi. L‘interruttore a pulsante viene premuto: l‘elettricità non passa. L‘interruttore a pulsante non viene premuto: l‘elettricità 1 scorre. 2 La figura illustra lo schema dei contatti che si ha quando l’interruttore viene premuto. Nel set di costruzione ROBO LT Beginner Lab, l’interruttore di pressione è sempre connesso ai contatti 1 e 3. ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Fototransistor Simbolo Circuito Un fototransistor è un interruttore elettronico, che reagisce alla luce. Sicuramente ti sarai chiesto come fanno ad aprirsi automaticamente le porte del supermercato o di alcuni negozi, senza che tu debba premere alcun pulsante. Per far ciò viene utilizzata una fotocellula, composta da una sorgente luminosa (trasmettitore) e da un sensore (ricevitore). In questo set, la lampadina a incandescenza lenticolare può essere utilizzata come trasmettitore e un fototransistor può essere utilizzato come ricevitore. "Ora conosci tutto sui componenti di base che userai. Forse ne avevi già parlato in classe: in questo caso non ti ho detto nulla di nuovo." Unità di Comando ROBO LT Controller ■ Il ROBO LT Controller è il cuore di questo set. Questa unità di comando è composta da moltissimi componenti elettronici, che tuttavia non sono visibili esternamente. L’interazione di questi componenti con il computer e con il programma che creerai, ti permetterà di gestire tutti i modelli proposti nel set ROBO LT Beginner Lab. Ora, qualche informazione tecnica: Il Controller ha 3 ingressi (I1-I3) per sensori, 2 uscite (M1-M2) per attuatori (motori o luci), un attacco per il collegamento di un alimentatore (9 V), due prese di collegamento per una batteria da 9 V o per batterie ricaricabili, una mini interfaccia USB, utile per la trasmissione di dati dal PC all’unità di comando e una luce a LED che funge da spia. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ■ Per l’alimentazione del ROBO LT Controller potrai utilizzare il blocco di alimentazione da 9 V incluso nel set. Inserisci una batteria come descritto nelle istruzioni di montaggio e connetti il vassoio di alimentazione all’unità di comando. rosso = + Nota! L’interruttore dell’unità di alimentazione può essere spostato in due direzioni. Il ROBO LT Controller si accende solo spostando l’interruttore in una direzione. Prova a vedere in che posizione devi metterlo per far accendere la spia verde (LED) posta sull’unità di comando. ITA Alimentazione verde de = – ■ ROBO Pro Light è il software che puoi utilizzare, insieme al ROBO LT Controller, per gestire i tuoi modellini. Il software si trova nel CD ROM incluso nel set e va installato sul tuo PC. ■ L’installazione del software ROBO Pro Light e del driver USB per il ROBO LT Controller sono descritte nelle istruzioni di installazione incluse nella scatola. Il PC necessita del driver USB per scambiare dati con il ROBO LT Controller. ROBO Pro Light Installazione ROBO Pro Light e driver USB Attenzione! È necessario disporre dei diritti dell’administrator per l’installazione dei driver USB sul PC. La cosa migliore da fare in questa fase è farsi aiutare da un utente di PC esperto. ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà "Sono sicuro che lo potresti fare anche senza il mio aiuto. Puoi avviare il software esattamente come fai con un nuovo gioco o con Internet. Ma ecco comunque una breve spiegazione." Inizia a programmare con ROBO Pro Light Se usi Windows troverai il programma ROBO Pro Light, cliccando su Start e quindi su Tutti i Programmi: I simboli illustrati potrebbero essere un pochino differenti, a seconda della versione di Windows che si sta utilizzando. Barra degli strumenti Finestra di prova Program screen Icone per la Programmazione Foglio di Lavoro Una volta avviato il software, sulla sinistra della schermata che comparirà troverai tutte le diverse icone per la programmazione, delle quali avrai bisogno per creare i programmi che ti permetteranno di gestire i modellini costruiti. Il bordo superiore della schermata è chiamato “barra degli strumenti”, come in altri programmi. Qui troverai le opzioni per Salvare, Aprire o Avviare un programma. La maggior parte della schermata è occupata dal foglio di lavoro: qui creerai i programmi per controllare i tuoi modellini. Gli input e gli outputs per l’LT Controller sono mostrati nella parte destra dello schermo. Da questa zona potrai accendere e spegnere gli attuatori con un semplice click del mouse, ad esempio per determinare se sono connessi correttamente. Prova a connettere un motore a un’uscita del Controller e quindi accendilo e spegnilo usando semplicemente il mouse. Puoi anche valutare se i sensori stanno lavorando correttamente. Per esempio puoi visualizzare se un interruttore a pulsante viene o meno premuto. Infine la barra verde in basso a destra mostra se la connessione tra il PC e l’LT Controller funziona correttamente. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà "Ecco, questi erano i concetti di base di cui avevi bisogno. Ora vorrai certamente costruire il tuo primo modellino e imparare a gestirlo attraverso il computer." ITA Giostra – Programmazione di Base ■ Avrai già visto delle giostre nei parchi di divertimento o nelle fiere di paese. La prima giostra a motore di cui si ha notizia fu presentata a Bolton, in Inghilterra, l’1 gennaio 1863. • Utilizzando le istruzioni di assemblaggio costruisci il modello. • Connetti i cavi elettrici seguendo lo schema dei circuiti. • Connetti il ROBO LT Controller al PC tramite l’interfaccia USB. • Accendi il blocco di alimentazione (si accenderà un LED verde sul ROBO LT Controller). • Avvia il software ROBO Pro Light. Nota! Nel caso in cui il LED verde sul ROBO LT Controller non si accendesse, prova a spostare l’interruttore del blocco di alimentazione nell’altra posizione. Se il LED verde continua a non accendersi la batteria potrebbe essere scarica. Attiv ità 1 La giostra può essere accesa e spenta con un click del mouse, utilizzando la sezione Test della finestra di controllo del software ROBO Pro Light. Quale direzione di rotazione del motore (oraria o antioraria) consente al modello di girare correttamente? Premi l’interruttore a pulsante sul modello. Ora, sullo schermo, dovresti vedere come I1 cambia, da 0 a 1, quando viene premuto il pulsante rosso. Nota! Se il valore per l’interruttore a pulsante, quando questo viene premuto, non cambia da 0 a 1, ma da 1 a 0, significa che non hai attaccato i cavi correttamente (vedi anche la descrizione dell’interruttore a pulsante). Una spina dev’essere collegata alla connessione 1 e l’altra alla connessione 3. ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Cos’è un programma di controllo? Un programma di controllo dice alla giostra cosa deve fare. Il software ROBO Pro Light ha un’interfaccia composta da varie icone di programmazione, che possono essere unite tra loro da linee di connessione formando così una sequenza. Avvio Icone di Programmazione "Ora, proviamo a creare insieme un programma di controllo." Linee di Collegamento Fine Quando il programma viene avviato, i comandi corrispondenti alle varie icone vengono eseguiti uno dopo l’altro. Un programma di controllo ROBO Pro inizia con l’immagine di un piccolo omino verde (Icona di Avvio) e finisce con l’immagine di un piccolo omino rosso (icona di Fine). Attiv ità 2 Riesci a ipotizzare cosa potrebbe far fare alla giostra il programma illustrato all’inizio di questa pagina? Soluzione: La giostra viene avviata, gira per 10 secondi e quindi si spegne. Ora è il tuo turno: crea il tuo primo programma! Attiv ità 3 La giostra viene avviata dall’interruttore (I1), gira per 10 secondi e quindi si ferma. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Puoi procedere così: • Il software ROBO Pro Light viene avviato, il ROBO LT Controller viene connesso al PC e alimentato grazie al blocco di alimentazione (l’interruttore del blocco di alimentazione è su ON e il LED verde sul Controller è acceso). • Cliccando su File-New nella schermata di gestione del software ROBO Pro Light puoi iniziare a creare un nuovo programma. Aiutandoti con il mouse trascina le icone di programmazione sul foglio di lavoro. Inizia sempre con la figura dell’omino verde. Clicca sull’icona tenendo premuto il tasto sinistro del mouse e trascinala semplicemente sul foglio di lavoro. Colloca l’icona nella posizione desiderata sul foglio di lavoro rilasciando il tasto sinistro o cliccandoci nuovamente sopra. • Come abbiamo visto nell’ultima attività, il motore M1 della giostra viene avviato quando l’interruttore a bottone I1 viene premuto. Per fare in modo che ciò sia possibile trascina l’icona Query switch sul foglio di lavoro, direttamente sotto l’icona di avvio. I due elementi dovrebbero essere connessi automaticamente. • Sposta la freccetta del mouse sopra il nuovo elemento appena disposto sul foglio di lavoro. Non appena il cursore diventa una manina, puoi trascinare l’icona continuando a tener premuto il tasto sinistro del mouse. Se invece premi il tasto destro del mouse comparirà la seguente finestra di dialogo: ITA ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà In questa finestra, puoi stabilire su quale interruttore a bottone (I1I3) andrai ad agire e cosa accadrà premendo (1) o non premendo (0) l’interruttore in questione. I1 e "interruttore premuto (1)" sono già impostati e per confermarli basta cliccare su OK. • Nel priossimo passaggio inserirai il motore nella sequenza. Come hai appena scoperto, dopo l’inserimento dell’icona potrai aprire la finestra di dialago cliccando sul tasto destro del mouse. Qui devi impostare la direzione di rotazione, in questo caso “oraria” (freccia verde). L’uscita M1 è preimpostata. Lascia il cursore a scorrimento per la velocita impostato in fondo a destra. Ora puoi chiudere la finestra cliccando su OK. • Ora, inserisci l’icona Ritardo. Nella finestra di dialogo imposta 10 secondi. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà • Dopo questo intervallo di tempo il motore dovrebbe spegnersi. Inserisci quindi nel programma un’altra icona Motore e nella finestra di dialogo seleziona M1 e Motor Stop. Infine è necessario inserire l’icona Fine (omino rosso). La sequenza di icone finale dovrebbe risultare così: • Prima di provare ad utilizzare il programma dovresti salvarlo, in modo che non vada perso. Per farlo, clicca sul pulsante Save. Seleziona la cartella in cui salvare il file Inserisci il nome del file Apparirà una finestra Windows standard. Qui, potrai selezionere la cartella in cui intendi salvare il file e potrai dargli un nome, per esempio “giostra”. Al file ROBO Pro verrà automaticamente attribuita l’estensione .rpl. Premi Save. A seconda della versione di Windows utilizzata la finestra di dialogo che apparirà potrebbe essere leggermente diversa rispetto a quella illustrata in figura. ITA ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà "OK, sei già un passo più avanti. Il tuo programma è completo e ora puoi testarlo." Avviare e arrestare il programma Per avviare il programma, cliccare con il mouse sul tasto Start. Non appena avrai premuto il tasto, la giostra girerà per 10 secondi e quindi si bloccherà. Ciò significherà che la sequenza del programma sarà arrivata alla fine. Accanto al bottone per avviare il programma, troverai il bottone per interromperlo. Indipendentemente dal punto della sequenza che sta eseguendo il programma, se premi il tasto Stop, il programma si blocca e finisce. "Per evitare di riavviare il programma dopo ogni sequenza, puoi creare un loop.” Programma loop Attiv ità 4 Modifica il programma in modo che, quando il motore si ferma, non salti alla fine della sequenza (icona con omino rosso) ma torni all’icona Query. In questo caso l’icona Fine non è più necessaria e può essere eliminata. Cancellare icone e collegamenti dal programma Clicca con il tasto sinistro del mouse sul tasto Delete e quindi sull’icona o il collegamento (linea) che vuoi cancellare. • In alternativa: sposta il cursore sull‘icona o sul collegamento che vuoi eliminare e quindi clicca con il tasto sinistro del mouse. L‘elemento diventerà rosso. Premi il tasto Canc sulla tastiera. Ciò eliminerà l‘elemento indesiderato. In questo caso cancella l’icona Fine (omino rosso) e la linea che la collegava all’icona Motor stop. Quindi disegna una linea di connessione che parta dalla fine dell’icona Motor stop e arrivi alla linea tra l’icona Avvio e l’icona Query. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Come disegnare le linee di connessione a mano. Fine dell’icona, Inizio della Linea • Posiziona il cursore alla fine dell’icona da cui vuoi far partire il collegamento, in questo caso l’icona Motor stop. Il cursore si trasformerà in una manina che regge una matita. • Premi il tasto sinistro del mouse e quindi rilascialo. In questo modo potrai iniziare a tracciare la linea. Trascinala con il mouse nella direzione desiderata (prima verso il basso, vedi figura). • Se vuoi cambiare la direzione della linea clicca una volta con il tasto sinistro del mouse. La linea verrà piegata e potrà essere tirata verso la direzione desiderata (prima a destra e poi verso l’alto). • Quando arrivi alla linea di connessione tra l’icona di Avvio e l’icona Query clicca un’altra volta con il tasto sinistro del mouse. Questo click fa terminare la linea qui. Il programma “loop” è finito. Nota! Se per errore tracci una linea in modo sbagliato e vuoi interromperla a metà (per poi cancellarla) fai doppio click con il tasto sinistro del mouse. Quindi cancella la linea interrotta. Salva il programma creato, ad esempio come “giostra 2” e quindi prova ad avviarlo. Funziona come desideravi? Nota! Visto che l’icona finale è stata rimossa, per interrompere il programma bisognerà cliccare sul tasto Stop . ITA ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 5 Procedere solo in una direzione è noioso! Cambia il programma in modo che, dopo l’arresto del motore, aspetti un secondo e quindi faccia girare la giostra nella direzione opposta per 10 secondi. Hai idea di quali icone hai bisogno per poter eseguire questa attività? Ok, ti aiuto. Basta espandere la sequenza di programmazione come illustrato nella figura sottostante e qundi tracciare un programma “loop” dall’ultima icona fino all’inizio del programma. Salva questo programma con qualsiasi nome, ad esempio “giostra 3”, in modo da poterlo usare nuovamente in un secondo momento. Per aprire un programma esistente già salvato, clicca sul tasto Open . Apparirà una finestra di dialogo nella quale potrai selezionare la cartella desiderata e quindi il programma in essa contenuto che si intende avviare. Siamo stati abbastanza sulla giostra, ma il set include anche altri entusiasmanti modelli e funzioni di programmazione. Divertiti! R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ITA Semaforo Pedonale ■ Sicuramente avrai visto v diversi modelli di semaforo. Incontrerai semafori semaff pedonali, o sistemi più complessi per laa regolazione del traffico agli incroci praticamente ogni giorno, quindi p il principio che sta dietro questo modello non ti è nuovo. Detto semplicemente, le luci di un semaforo sempp vengono accese e spente in una certa sequenza. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Attiv ità 1 Programma un semaforo pedonale, commutato da un interruttore a pulsante. Inizialmente la luce deve essere rossa. Quando l’interruttore viene premuto la luce rossa resta illuminata per 5 secondi. Quindi dovrebbe accendersi la luce verde, e restare accesa per 10 secondi. Dopodiché la luce dovrebbe tornare rossa. Salva il programma come: Semaforo Pedonale-1.rpl Per poter utilizzare l’interruttore, devi usare l’icona Branch switch. Nella relativa finestra di dialogo troverai tre possibili connessioni. Il programma dev’essere così impostato: se l’interruttore non viene premuto andare all’output 0. Se viene premuto, andare all’output 1. Anche per l’icona Lamp output puoi impostare diverse variabili. Puoi regolare la luminosità, gli output (M1 o M2), e stabilire se la luce deve accendersi o spegnersi. ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 2 Come nell’attività 1, programma il semaforo pedonale in modo che funzioni mediante un interruttore a bottone. Tutttavia ora, dopo che la luce verde è rimasta accesa per 10 secondi consecutivi puoi farla lampeggiare, per indicare agli ipotetici pedoni che sta per accendersi di nuovo la luce rossa. Fa in modo che la luce verde lampeggi 3 volte. Salva il programma come: Semaforo Pedonale-2.rpl Nota! Puoi trovare la soluzione di questa Attività tra i programmi preimpostati del software ROBO Pro Light su C:\Tutti i Programmi\ROBOPro-Light\Sample Programs\ROBO-LT-Beginner-Lab\ Pedestrian Light-2.rpl. In questa sezione potrai trovare anche altri esempi di programmi relativi alle Attività proposte in questo libretto. Faro con luce lampeggiante ■ I Fari si trovano in zone importanti o in punti pericolosi e servono come punti di segnalazione per le navi, visibili anche a grande distanza, persino di notte. Con i loro segnali luminosi, i fari indicano alle navi la via da seguire e questo facilita la navigazione e l’aggiramento delle zone più pericolose. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Nelle carte nautiche, le caratteristiche di specifici impulsi luminosi emessi dal faro sono descritte da abbreviazioni uniformi, per esempio: Luce Intermittente Le fasi di luce e buio sono ugualmente lunghe. Flash Le fasi di luce sono più corte delle fasi di buio. Un flash dura meno di due secondi. Luce Lampeggiante Le fasi di luce sono più corte delle fasi di buio ma l’impulso luminoso dura almeno due secondi. Attiv ità 1 Programma un segnale luminoso in accordo con il principio isofase (luce intermittente). Imposta il programma in modo che le fasi di luce e le fasi di buio siano di uguale lunghezza, pari a due secondi. Salva il programma come: Faro-1.rpl R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ITA Attiv ità 2 Programma l’illuminazione del faro in modo che segua le caratteristiche dei flash luminosi. Imposta la fase di luce in modo che duri 0,3 secondi e la fase di buio in modo che duri 1,5 secondi. Salva il programma come: Faro-2.rpl Attiv ità 3 Programma l’illuminazione del faro in modo che si adatti alle caratteristiche descritte come proprie della “luce lampeggiante”. Entrambe le luci sul modellino dovrebbero essere illuminate per un diverso periodo di tempo, l’una indipendentemente dall’altra. Salva il programma come: Faro-3.rpl Frigorifero "Beeeene, ora cerchiamo di capire un oggetto che puoi trovare dentro casa: il frigorifero. Mi sono sempre chiesto se quando chiudo la porta del frigorifero la luce si spegne davvero.” ■ Con la diffusione dell’elettricità e del frigorifero la sua antenata, la ghiacciaia, ha perso il suo fascino. Da una prospettiva storica la parola ghiacciaia è ancora usata ma, quando funziona ad elettricità, è chiamata frigorifero. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Attiv ità 1 Quando si apre la porta del frigorifero la luce bianca si accende. Quando si chiude la porta la luce si spegne. Salva il programma come: Frigorifero-1.rpl ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 2 È un’integrazione all’Attività 1: se la porta del frigorifero resta aperta per più di tre secondi, la luce bianca resta accesa ma in aggiunta la luce rossa comincia a lampeggiare. Anche questa seconda luce deve però spegnersi quando la porta viene richiusa. Salva il programma come: Frigorifero-2.rpl Lavatrice "Il giorno di bucato nel diciannovesimo secolo era una vera seccatura! Fortunatamente per noi, oggi, è molto più semplice lavare i panni, grazie alla lavatrice." ■ Il modello più diffuso è la lavatrice a tamburo, nella quale un tamburo di lavaggio ruota attorno ad un asse. Il vantaggio principale di questo tipo di macchina sono le sue dimensioni ridotte che permettono di installarla, ad esempio, in cucina. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Ma cosa accade durante un programma della lavatrice? Possono essere eseguiti un ciclo di lavaggio, un ciclo di centrifuga e un ciclo di asciugatura, se l’apparecchio lo prevede. Nelle seguenti attività comprenderai come funziona la lavatrice e imparerai a impostare un programma che ne simuli le funzioni. Attiv ità 1 Dopo aver premuto il tasto Start, il tamburo ruota a bassa velocità per 10 secondi (ciclo di lavaggio). Il display (spia luminosa su M2) mostra il funzionamento del macchinario. Salva il programma come: Lavatrice-1.rpl Attiv ità 2 Modifica il programma in modo che la lavatrice parta solo quando l’interruttore di sicurezza della porta risulta chiuso. Salva il programma come: Lavatrice-2.rpl R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 3 Inserisci un ciclo di centrifuga nel programma. In questa fase il motore girerà alla massima velocità per 15 secondi. Salva il programma come: Lavatrice-3.rpl Attiv ità 4 Espandi il programma inserendo anche un ciclo di asciugatura per il bucato. Per farlo, il tamburo dovrà prima ruotare lentamente in senso orario (10 secondi) quindi fare una pausa di tre secondi e poi ruotare in senso antiorario per altri 10 secondi. Salva il programma come: Lavatrice-4.rpl ROBO Pro Light offre inoltre la possibilità di mostrare il ciclo che si sta eseguendo (ad esempio il lavaggio o la centrifuga), come testo vero e proprio che compare sullo schermo. A questo scopo, usa l’icona di programmazione Text output. Puoi inserire questa icona in qualsiasi posizione all’interno del tuo programma se vuoi inviare all’utente alcune informazioni. Le informazioni scritte nell’icona verrano poi mostrate nel campo display dello schermo. Come altri elementi di programmazione, puoi posizionare il campo display in qualsiasi punto dello schermo. Importante! Il testo che appare nel display può essere sovrascritto da un nuovo comando di testo. Se non vuoi che appaia nessun testo lascia l’icona vuota. Attiv ità 5 Durante le varie fasi del programma, l’utente dovrebbe visualizzare sul display il nome corrispondente al ciclo in esecuzione. Quando tutti i cicli sono stati eseguiti sul display dovrebbe comparire la scritta Fine. Fa in modo che ciò avvenga. Salva il programma come: Lavatrice-5.rpl ITA ITA Porta Scorrevole R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ■ Una porta scorrevole può essere composta da una o più ante. Essa segue in genere un binario di guida, che può essere ancorato al bordo superiore o inferiore della porta, mentre è libera sui lati. Ma non bisogna credere che sia un’invenzione dell’era moderna: a Pompei vi sono testimonianze di porte scorrevoli nei palazzi romani del I secolo d.C. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Attiv ità 1 Crea un programma che faccia chiudere la porta scorrevole, indipendentemente dalla posizione in cui si trova la porta nel momento in cui avvii il programma. Prova ad avviare il programma con la porta in diverse posizioni. Salva il programma come: Porta Scorrevole-1.rpl Importante! L’interruttore a pulsante 1 (I1) è il finecorsa per una porta aperta, l’interruttore a pulsante 2 (I2) è il finecorsa per una porta chiusa. Prima di acquistare familiarità con i nuovi comandi di controllo, osserva l’attività associata. Attiv ità 2 C’è una fotocellula all’ingresso della porta scorrevole. Se la barriera ottica viene interrotta, come se qualcuno volesse entrare in un negozio munito di porte scorrevoli, allora la porta si deve aprire e poi richiudere automaticamente dopo 10 secondi. Salva il programma come: Porta Scorrevole-2.rpl Hai già programmato una funzione simile per l’attività con l’interruttore del semaforo pedonale. Il programma attende finché il fascio luminoso non viene interrotto (I3=0). Nella finestra di dialogo dell’icona di programmazione Query phototransistor, puoi decidere se il programma deve continuare quando la barriera ottica viene interrotta (0) o quando non viene interrotta (1). R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà ITA "Ouch" Attiv ità 3 Per fare in modo che nessuno resti incastrato mentre la sta attraversando, la porta si dovrebbe immediatatamente aprire quando qualcosa interrompe la barriera ottica creata dalla fotocellula. Cambia il programma di conseguenza. Espandi inoltre il programma in modo che la porta resti aperta 5 secondi prima di richiudersi. Salva il programma come: Porta Scorrevole-3.rpl Per poter utilizzare il fototransistor devi usare il comando Branch phototransistor. Anche in questo caso si apre una finestra di dialogo con tre possibili connessioni. Il programma va così impostato: se la barriera ottica è interrotta (se non passa luce) vai all’output 0. Se la barriera ottica non è interrotta allora vai all’output 1. "L’hai notato anche tu? Spesso la luce delle scale di un palazzo si spegne da sola, trascorso un certo intervallo di tempo. Altre volte c‘è una luce che si accende automaticamente, non appena entri nell’edificio. Com’è possibile?" ■ Una piccola scatola, che in genere è installata nel pannello di controllo della corrente del palazzo, assicura che l’illuminazione delle scale possa essere accesa da ogni piano. Dopo un certo intervallo di tempo, che può essere impostato a seconda delle esigenze, la luce si spegne automaticamente. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Importante! Entrambi gli interruttori a pulsante (I1 e I2) potrebbero essere usati nei due piani di un palazzo. Il rilevatore di movimento, in questo caso una fotocellula (I3), potrebbe essere localizzato, ad esempio, nel seminterrato. Illuminazione Vano Scala ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 1 Quando uno dei due interruttori viene premuto, la luce del vano scale si accende. Dopo 10 seconti si spegne automaticamente. Salva il programma come: Scala-1.rpl Attiv ità 2 Ora crea un programma che consenta alla luce di accendersi sia premendo l’interruttore a pulsante che in seguito ad interazione con la fotocellula. Salva il programma come: Scala-2.rpl Attiv ità 3 Quando uno dei due interruttori a pressione viene pigiato la luce del vano scala si accende. Se uno dei due interruttori viene premuto nuovamente la luce si spegne. Salva il programma come: Scala-3.rpl Tergicristalli ■ Un tergicristallo è un dispositivo che permette di pulire il parabrezza o il lunotto posteriore di un veicolo, di un aereo, di una nave o di un convoglio ferroviario. Nel Novembre 1903 l’inventrice statuninse Mary Anderson depositò il brevetto per il primo sistema di tergicristalli del mondo. Costruisci il modellino utilizzando le istruzioni di montaggio e quindi connetti i cavi elettrici seguendo lo schema dei circuiti. Utilizzando in modo combinato due interruttori a pulsante sono possibili quattro differenti situazioni, che potrai inserire nel tuo programma. I1 I2 OFF Non premuto. Non premuto. Intervallo Premuto. Non premuto. Funzionamento continuo - Lento Premuto. Premuto. Fuzionamento continuo - Veloce Non premuto. Premuto. Puoi utilizzare la fotocellula per controllare l’Intervallo. Per questo, la fotocellula viene interrotta dopo ogni ciclo di pulitura. R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Attiv ità 1 Iniziamo con un’attività molto semplice. Non appena il commutatore rotante viene spostato nella posizione 1, i tergicristalli iniziano a muoversi. Se viene rispostato su 0 i tergicristalli si fermano. Salva il programma come: Tergicristalli-1.rpl Attiv ità 2 Se la pioggia è intensa i tergicristalli si muovono più velocemente. Fa in modo che questo accada quando l’interruttore si trova sulla posizione 2. Imposta il tuo programma in modo che quando l’interruttore passa dalla posizione 1 alla posizione 2, i tergicristalli si muovano più velocemente, e quando invece l’interruttore venga spostato nella posizione 1, tornino a muoversi a velocità normale. Salva il programma come: Tergicristalli-2.rpl "Ora ti proporrò l’ultima attività. Ormai sei pronto per creare autonomamente nuovi programmi e nuovi modelli con il tuo set di costruzione fischertechnik." Attiv ità 3 Modifica il programma già creato in modo che con l’interruttore in posizione 1, venga attivato il classico funzionamento a intermittenza dei tergicristalli. In questo caso la fotocellula si interrompe dopo ogni ciclo di pulitura. Dopo due secondi il ciclo di pulitura ricomincia. Salva il programma come: Tergicristalli-3.rpl ITA ITA R O B O LT B e g i n n e r L A B P r o p o s t e d i At t i v i tà Puoi trovare altri set di costruzioni fischertechnik con i quali espandere la tua conoscenza dei concetti relativi alla programmazione su: www.fischertechnik.de Se qualcosa non funziona... ...probabilmente troverai la soluzione ai tuoi problemi in questa tabella. Problema 1. Il Software ROBO Pro Light non riesce a stabilire una connessione con il ROBO LT Controller. Causa Possibile Soluzione Il blocco di alimentazione non è acceso (il LED verde sul Con- Mettere l’interruttore del blocco di alimentazione su ON (Attroller non è acceso). tenzione: il Controller lavora solo con l’interruttore posizionato su una delle due possibili posizioni.) La batteria è scarica (il LED verde non è illuminato nonostante Inserire una nuova batteria da 9 V, ricaricare la batteria ricariil blocco di alimentazione sia impostato su ON). cabile o usare un’unità di alimentazione da 9 V. 2. L’interruttore non funziona. Il cavo USB non è connesso. Inserisci il cavo USB. Il driver USB non è installato. Installare il driver USB (vedi istruzioni per l’installazione contenute nella scatola). Le prese elttriche non sono collegate nel modo corretto Con l’interruttore usa le connessioni 1 e 3. Inserisci le spine all’interruttore o al ROBO LT Controller. nelle due prese jack per I1, I2 o I3 sul Controller. Per il programma di controllo che hai creato tu stesso: nella Rivedi il programma che hai creato e modifica le impostazioni. finestra di dialogo delle icone di programmazione potresti aver selezionato output M1 o M2, non corretti. 3. Il fototransistor non funziona. Spine elettriche collegate in modo non corretto. Sul fototransistor: collegare la spina rossa sul lato con il puntino rosso e la spina verde sul lato non segnato. Sul Controller: Collegare la spina rossa su I1, I2 o I3 e la spina verde alla connessione associata. La lampadina lenticolare della fotocellula non si accende. Connettere la lampadina lenticolare a M1 o M2 e accenderla. La luce della lampada lenticolare passa diagonalmente davanti Spostare la lampada lenticolare in modo che la luce colpisca alla fototransistor. il fototransistor. La luce della lampadina lenticolare è troppo debole. Inserire una nuova batteria da 9 V, oppure ricaricare le batterie ricaricabili o utilizzare un’unità di alimentazione da 9 V. Il programma che hai creato tu stesso: nella finestra di dialogo Rivedi il programma di controllo e modifica le impostazioni. delle icone di programmazione potresti aver selezionato output M1 o M2 non corretti. 4. Il motore non gira o la luce non Il motore o la luce non sono connessi al LT Controller. si accende. Connetti il motore o la luce al LT Controller seguendo lo schema dei circuiti del modello in questione. Il motore o la luce sono connessi all’output sbagliato del LT Usa lo schema dei circuiti per verificare quale output (M1 o Controller. M2) va usato per il motore o la luce e connettili di conseguenza. Il programma che hai creato tu stesso: nella finestra di dialogo Verifica le impostazioni del programma creato e imposta dell’icona di programmazione potresti aver selezionato l’output l’output corretto. M1 o M2 non corretti. Il LED verde sul ROBO LT Controller lampeggia molto velo- Controllare i cavi ed eliminare il cortocircuito. cemente (almeno quattro volte al secondo): cortocircuito su una delle uscite. Polo positivo e negativo collegati direttamente. 5. Il motore gira nella direzione La spina rossa e quella verde sono state invertite. sbagliata. Invertire le spine sul motore. Cambia la direzione di rotazione del motore nelle impostazioni del programma. 6. Non riesci a trovare i programmi d’esempio predisposti. Non sai in che cartella sono collocati i programmi. I programmi d’esempio per tutti i modellini inclusi nel set sono situati in: C:\Tutti i Programmi\ROBOPro-Light\Sample Programs\ROBO LT Beginner Lab 7. Problema diverso da quelli elencati Sconosciuta. Contatta direttamente fischertechnik: www.fischertechnik.de
Scaricare