INVERTER HITACHI
SERIE L300P
MANUALE DI ISTRUZIONE
Classe 200/400V trifase
Distributore Ufficiale per l’Italia
DRIVETEC SRL
Via Ghisalba, 13
20021 Bollate
Tel.02/3500101
Fax 02/38302566
NB601FX-HFE2_ ITA
Norme di sicurezza
Al fine di utilizzare al meglio gli inverter della serie L300P si consiglia un’attenta lettura del presente
manuale prestando particolarmente attenzione a tutte le avvertenze di sicurezza indicate con l’apposito
simbolo. Per una rapida consultazione tenere il presente manuale a portata di mano.
Simboli e definizioni
I messaggi relativi alla sicurezza vengono evidenziati dall’apposito simbolo di pericolo
AVVERTENZE o PRECAUZIONI. Ognuna di queste parole ha un significato ben preciso che di
seguito riportiamo.
Questo simbolo indica la presenza di tensione pericolosa. E’ utilizzato per
richiamare l’attenzione su parti ed operazioni pericolose per il personale che
utilizza questa apparecchiatura .
Leggere questo messaggio e seguire scrupolosamente queste istruzioni.
Questo simbolo rappresenta un’indicazione di allerta è utilizzato per segnalare
tutte le operazioni che potrebbero risultare pericolose per il personale.
Leggere il messaggio e seguire scrupolosamente le istruzioni indicate.
PERICOLO PERICOLO
Indica una situazione di potenziale pericolo , che se non evitata potrebbe
comportare rischi per la salute del personale operante compreso il rischio di
morte.
PRECAUZIONE
PRECAUZIONE
Indica una situazione di potenziale pericolo che se non evitata potrebbe
comportare moderati rischi per la salute del personale, e serio rischio di
danneggiamento del prodotto.
CAUTION
Quanto descritto con il simbolo
può, se non evitato, produrre,
serie conseguenze, in funzione della specifica situazione. Aspetti importanti
sono descritti in CAUTION (come pure in WARNING), e vanno osservati.
NOTE
NOTE
NOTE indica un’area o una situazione di particolare interesse che debba essere
enfatizzata. Ad esempio può essere utilizzata per evidenziare aspetti
prestazionali del prodotto.
PERICOLO DI ALTA TENSIONE
L’inverter e tutti i suoi circuiti elettronici fanno utilizzo di tensioni pericolose. Quando si
interviene direttamente su apparecchiature di questo genere esiste il pericolo di venire in
contatto con parti sottoposte a tensioni pericolose. Si raccomanda pertanto estrema cautela al
fine di evitare scosse elettriche. Nel caso di interventi sull’apparecchiatura si raccomanda di
operare isolati dal terre no a mezzo di opportuna pedana o tappeto isolante, eventuali controlli
manuali dei componenti dovranno essere effettuati con una sola mano. In Casi di emergenza
lavorare sempre in presenza di un’altra persona. Prima di fare qualsiasi intervento ispettivo o di
manutenzione scollegare l’inverter dalla rete di alimentazione. Accertarsi che l’inverter sia
collegato al circuito di terra a mezzo di opportuno cavo. Quando si opera sull’inverter o su parti
meccaniche rotanti indossare gli opportuni occhiali di sicurezza.
i
PRECAUZIONI
PERICOLO : Questa apparecchiatura deve essere installata, programmata, avviata da personale
qualificato che abbia familiarità con la costruzione e con l’uso di apparecchiature che utilizzino potenziali
pericolosi. Il mancato rispetto di quanto esposto mette a repentaglio la sicurezza del personale.
PERICOLO : L’utilizzatore è responsabile del buon funzionamento di tutta la parte meccanica e
dovrà garantirne la resistenza ad una velocità massima pari al 150% della velocità nominale della
macchina.
PERICOLO : Installare un interruttore differenziale con un circuito insensibile alle correnti disperse in
alta frequenza così da evitarne interventi intempestivi. La protezione di guasto a massa in dotazione agli
inverter è stata concepita come protezione dell’inverter. Non è assolutamente pensata come protezione
delle persone.
PERICOLO : PRIMA DI EFFETTUARE QUALSIASI TIPO DI LAVORO SULL’INVERTER SI
RACCOMANDA DI TOGLIERE LA TENSIONE DI ALIMENTAZIONE.
PERICOLO
: UTILIZZARE PROTEZIONI DI SOVRACORRENTE E DI SOVRACCARICO DEL
MOTORE INDIPENDENTI DALL’INVERTER IN ACCORDO CON LA NORMATIVA VIGENTE.
PRECAUZIONI : Prima di utilizzare gli inverter della serie L300P le presenti istruzioni dovranno
essere attentamente lette e capite.
PRECAUZIONI : Circuiti di messa a terra adeguati, dispositivi di protezione e la loro installazione
sono applicati sotto la responsabilità dell’utilizzatore e comunque non forniti da Hitachi.
PRECAUZIONI : utilizzare la protezione termica per il motore. L’intervento della protezione termica
dovrà arrestare l’inverter allo scopo di salvaguardare il motore.
PRECAUZIONI : ANCHE DOPO LO SPEGNIMENTO DELL’INVERTER UNA PERICOLOSA
TENSIONE RESIDUA PERMANE SINO ALLO SPEGNIMENTO DELLA LAMPADA DI CARICA
(CHARGE)
PRECAUZIONI : Prestare attenzione alle parti rotanti in movimento e alle tensioni pericolose. Si
raccomanda vivamente che i lavori di installazione siano conformi alle normative locali vigenti.
Installazione, manutenzione dovrebbero essere eseguite da personale qualificato. Le procedure di test
raccomandate dalla fabbrica e contenute in questo manuale dovranno essere seguite. Disconnettere
sempre la rete di alimentazione prima di lavorare sull’inverter.
NOTA : GRADO DI INQUINAMENTO 2
L’inverter dovrà essere utilizzato in ambienti con grado di inquinamento 2.
Le possibilità per ridurre la presenza di inquinamento conduttivo sono:
1) Utilizzare una custodia senza ventilazione
2) Utilizzare una custodia con ventilazione forzata filtrata che garantisca il sufficiente ricambio di aria.
ii
Precauzioni per la Compatibilità Elettromagnetica (EMC)
Gli inverter della serie L300P aderiscono alla Direttiva EMC (89/336/EEC) relativa alla compatibilità
elettromagnetica fatto salvo il rispetto degli standard di installazione sotto riportati
PERICOLO :Questa apparecchiatura deve essere installata, e avviata da personale qualificato
che abbia familiarità con apparecchiatura alimentate a tensioni pericolose. Il mancato rispetto di questa
avvertenza può causare seri danni alla salute.
1.La tensione di alimentazione degli inverter della serie L300P deve rispettare le seguenti specifiche:
a. Fluttuazione di tensione +/-10% o meno.
b. Asimmetria di tensione +/-3% o meno.
c. Variazione di frequenza +/-4% o meno.
d. Deformazione della tensione THD = 10% o meno.
2.Accorgimenti di installazione:
a. Utilizzare un filtro di rete progettato per gli inverter della serie L300P .
3.Cablaggi
a. Il cavo di collegamento del motore deve essere schermato e di lunghezza inferiore a 20 metri.
b. Al fine di soddisfare i requisiti della Direttiva EMC la frequenza di modulazione non dovrà
superare 5 kHz.
c. Mantenere i cavi di potenza e i cavi di segnale separati.
d. Nel caso venga remotato il tastierino, la conformità alle norme EMC non è garantita.
4.Condizioni ambientali – utilizzando il filtro EMC seguire le seguenti linee guida:
a. Temperatura ambiente: -10 - +50 °C.
b. Umidità: 20 to 90% RH (senza condensa)
2
c. Vibrazioni: 5.9 m/sec (0.6 G) 10 – 55Hz. (L300P-015-220LF/ 015-220HF)
2
2.94 m/sec (0.3 G) 10 – 55Hz. (L300P -300-750LF/300-1320HF)
d. Condizioni di installazione : fino a 1000 metri s.l.m., in ambiente chiuso (evitare la presenza
di polvere o di gas corrosivi)
iii
Conformità alla Direttiva di Bassa Tensione (LVD)
Il quadro di contenimento deve essere conforme alla Direttiva di Bassa Tensione..
L’inverter è conforme alla Direttiva di Bassa Tensione installato in quadro o mediante l’aggiunta di
chiusure come sotto descritto:
1.Quadro e chiusure
L’inverter deve essere installato in un quadro avente un grado di protezione IP2X. In aggiunta, le
superfici esterne del quadro che sono facilmente raggiungibili dovranno avere come minimo un
grado di protezione IP4X, o comunque costruite in modo da prevenire che oggetti di piccole
dimensioni possano penetrare nell’inverter.
Fig. Quadro di contenimento Inverter
iv
NOTA: questa porzione del manuale è dedicata agli utenti USA e deve essere consegnata all’installatore
e all’utente finale. Si è pertanto deciso di lasciarla scritta in lingua inglese.
UL Warnings and Cautions Manual for L300P series
This auxiliary instruction manual should be delivered to the end user.
1.Wiring Warnings for Electrical Practices and Wire Specifications
(1) ! WARNING :
"Use 60/75 ºC CU wire only" or equivalent.
(2) !
WARNING :
"Open Type Equipment." For models L300P-900-1320H.
(3) !
WARNING :
"Suitable for use on a circuit capable or delivering not more than 10,000 rms
symmetrical amperes, 240 V maximum." For models with suffix L.
(4) !
WARNING :
"Suitable for use on a circuit capable or delivering not more than 10,000 rms
symmetrical amperes, 480 V maximum." For models with suffix H.
2.Tightening Torque and Wire Range
(1) !
WARNING :
Tightening torque and wire range for field wiring terminals are marked
adjacent to the terminal or on the wiring diagram.
Model Name
Tightening Torque [N•m]
Wire Range (AWG)
L300P-015L
1.5
14
L300P-022L
L300P-037L
L300P-055L
1.5
1.5
2.5
14
10
8
L300P-075L
L300P-110L
L300P-150L
2.5
4.9
4.9
6
4
2
L300P-185L
L300P-220L
L300P-300L
4.9
8.8
8.8
1
1/0
2/0
L300P-370L
L300P-450L
L300P-550L
8.8
13.7
13.7
3/0 or 2 parallel of 1 AWG
250kcmil or 2 parallel of 1 AWG (75ºC)
350kcmil or 2 parallel of 1/0 AWG
L300P-750L
13.7
350kcmil or 2 parallel of 1/0 AWG
v
L300P-015H
L300P-022H
L300P-037H,040H
1.5
1.5
1.5
18
16
14
L300P-055H
L300P-075H
L300P-110H
2.5
2.5
4.9
12
10
8
L300P-150H
L300P-185H
L300P-220H
4.9
4.9
4.9
6
6
4
L300P-300H
L300P-370H
L300P-450H
4.9
4.9
8.8
3
1
1
L300P-550H
L300P-750H
L300P-900H
8.8
8.8
13.7
1/0
250kcmil or 2parallel of 1 AWG (75ºC)
250kcmil or 2parallel of 1 AWG (75ºC)
L300P-1100H
L300P-1320H
13.7
13.7
350kcmil or 2parallel of 1/0 AWG
350kcmil or 2parallel of 1/0 AWG
3.Circuit Breaker / Fuse Size
(1) !
WARNING :
Distribution fuse/circuit breaker size marking is included in the manual to
indicate that the unit shall be connected with an UL Listed inverse time circuit
breaker, rated 600 V with the current ratings or an UL Listed fuse as shown in
the table below.
Model Name
Circuit Breaker [A]
Fuse [A]
L300P-015L
10
10
L300P-022L
L300P-037L
L300P-055L
15
20
30
15
20
30
L300P-075L
L300P-110L
L300P-150L
40
60
70
40
60
70
L300P-185L
L300P-220L
L300P-300L
90
100
150
90
100
150
vi
L300P-370L
175
175
L300P-450L
200
200
L300P-550L
L300P-750L
L300P-015H
250
300
10
250
300
10
L300P-022H
L300P-037H,040H
L300P-055H
10
15
15
10
15
15
L300P-075H
L300P-110H
L300P-150H
20
30
35
20
30
35
L300P-185H
L300P-220H
L300P-300H
50
50
70
50
50
70
L300P-370H
L300P-450H
L300P-550H
80
100
125
80
100
125
L300P-750H
L300P-900H
L300P-1100H
150
-
150
200
225
L300P-1320H
-
300
4.Motor overload protection
These inverters provide solid state motor overload protection. Set parameter b012, b212 or b312 using
the following instructions.
b012 “electronic overload protection”
b212 “electronic overload protection, 2nd motor”
set the rated current [A] of the motor.
setting range is 0.2*rated current to 1.2*rated current.
(1) !
WARNING :
When two or more motors are connected to the inverter, they cannot be
protected bye the electronic overload protection. Install an external thermal
relay to each motor.
5.Others
(1) !
WARNING :
"Field wiring connection must be made by an UL Listed and CSA Certified
closed-loop terminal connector sized for the wire gauge involved. Connector
must be fixed using the crimp tool specified by the connector manufacturer. ",
or equivalent wording included in the manual.
vii
viii
Tabella delle revisioni
No.
Contenuto delle revisioni
Data del
rilascio
Manuale
operativo No.
1
Prima edizione NB601AX
Sett. 1999
NB601AX
2
Il dato 02 della funzione b004 è stato aggiunto
La frequenza di modulazione delle taglie > 37kW è stata aggiunta
Ott. 1999
NB601BX
3
Aggiunta la specifica della taglia 75kW.
Giu. 2000
NB601CX
4
Saltato un numero
5
Aggiunta la specifica delle taglie 90-132kW..
Feb. 2001
NB601EX
6
Modifica nome costruttore (cambio Ragione Sociale).
Apr. 2002
NB601FX
7
Aggiunta taglie 1,5-7,5kW e Appendice C con descrizione delle
caratteristiche aggiuntive serie HFE2
Sett. 2004
NB601FX-H
FE2_ITA
NB601DX
ix
PRECAUZIONI DI SICUREZZA
2. Installazione e cablaggio
PERICOLO
• Assicuratevi di mettere a terra l’inverter.
Diversamente, c’è pericolo di scossa elettrica o incendio.
……
p.2-9
• Il lavoro di cablaggio deve essere eseguito da personale qualificato.
Diversamente, c’è pericolo di scossa elettrica o incendio.
……
p.2-6
• Verificate di avere tolto l’alimentazione prima di eseguire il cablaggio.
Diversamente, c’è pericolo di scossa elettrica o incendio.
……
p.2-8
• Montate l’inverter prima di eseguire il cablaggio.
Diversamente, c’è pericolo di scossa elettrica e/o lesioni.
……
p.2-5
• Non rimuovete il passacavo in gomma (taglie 1.5 - 75kW)
E’ una precauzione nel caso un cavo danneggiato possa essere
cortocircuitato o messo a terra con la lamiera del coperchio passacavi.
……
p.2-4
• Assicuratevi che la tensione di ingresso sia:
Trifase 200-240V 50/60Hz (per i modelli con il suffisso L)
Trifase 380-480V 50/60Hz (per i modelli con il suffisso H)
……
p.2-6
• Assicuratevi di non alimentare con una sola fase.
Diversamente, c’è pericolo di incendio.
……
p.2-8
• Assicuratevi di non collegare la tensione rete ai terminali di uscita U,V,W.
Diversamente, c’è pericolo di lesioni e/o incendio.
……
p.2-5
PRECAUZIONE
• Assicuratevi di non collegare la resistenza di frenatura direttamente ai
terminali della tensione continua (PD,P e N.
……
Diversamente, c’è pericolo di incendio.
• Assicuratevi che nel circuito esterno l’interruttore differenziale o i fusibili di
ingresso siano correttamente dimensionati.
……
Diversamente, c’è pericolo di incendio.
p.2-5
p.2-12
• Per quanto riguarda sezione dei conduttori, interruttori differenziali e
contattori elettromagnetici, assicuratevi che siano di portata equivalente a
……
quelli specificati
Diversamente, c’è pericolo di incendio.
p.2-12
• Non utilizzate come normale manovra di arresto inverter l’apertura di un
contattore elettromagnetico in ingresso o in uscita inverter.
……
Diversamente, c’è pericolo di lesioni e/o danni alla macchina azionata.
p.2-6
• Serrate le viti con la coppia di serraggio specificata, verificando che non
……
restino connessioni lente.
Diversamente, c’è pericolo di incendio.
p.2-12
x
PRECAUZIONI DI SICUREZZA
3. Avvertenze operative
PERICOLO
• Con l’inverter alimentato, assicuratevi di non toccare i terminali di potenza
o staccare cavi di segnale o connettori attivi.
……
Diversamente, c’è pericolo di scossa elettrica.
p.3-1
• Alimentate l’inverter assicurandovi di avere chiuso il coperchio superiore.
Con l’inverter alimentato, non aprite il coperchio frontale.
Diversamente, c’è pericolo di scossa elettrica.
……
p.3-1
• Non azionate gli interruttori con le mani bagnate.
Diversamente, c’è pericolo di scossa elettrica.
……
p.3-1
• Ad inverter alimentato, non toccate i terminali anche se l’inverter è in Stop.
……
Diversamente, c’è pericolo di scossa elettrica.
p.3-1
• Se la funzione di riavvio automatico è attiva, l’inverter può riavviare il
motore anche se si trova in stato di arresto per blocco / errore.
Non avvicinatevi alla macchina azionata. Assicuratevi che la macchina sia
……
progettata in modo che la sicurezza del personale sia salvaguardata in
caso di riavvio automatico.
Diversamente, c’è pericolo di lesioni personali.
p.3-1
• Non attivate il riavvio automatico per dispositivi elevatori o translatori, in
quanto il motore viene lasciato in rotazione libera durante la sequenza di
riavviamento.
……
Diversamente, c’è pericolo di lesioni personali e/o danni meccanici alla
macchina azionata.
p.3-1
• Anche se la tensione di alimentazione scompare per un breve periodo di
tempo, l’inverter può ritornare operativo al ritorno della tensione se il
comando di marcia viene lasciato attivo. Progettate la sequenza di marcia ……
in modo che non ci sia un riavvio indesiderato al ritorno della tensione.
Diversamente, c’è pericolo di lesioni personali.
p.3-1
• Il tasto di Stop è operativo solo se la funzione corrispondente è attiva.
Non utilizzate questo comando come arresto di emergenza.
Diversamente, c’è pericolo di lesioni personali.
……
p.3-1
• Se il comando di marcia è attivo, dopo un comando di Reset l’inverter
riparte immediatamente. Assicuratevi di resettare l’inverter solo dopo aver
……
verificato che il comando di marcia è stato disattivato.
Diversamente, c’è pericolo di lesioni personali.
p.3-1
• Fate attenzione a non toccare le parti interne di un inverter alimentato o
non introdurre corpi metallici in esso (cacciavite o altro).
……
Diversamente, c’è pericolo di scossa elettrica e/o incendio.
p.3-1
xi
PRECAUZIONI DI SICUREZZA
PRECAUZIONE
• Le alette di raffreddamento possono raggiungere temperature elevate: fate
……
attenzione a non toccarle.
Diversamente, c’è pericolo di ustioni.
• L’inverter consente di impostare facilmente basse e alte velocità di lavoro.
Verificate le tolleranze del motore e della macchina azionata che siano
……
compatibili con il campo di regolazione dell’inverter.
Diversamente, c’è pericolo di lesioni personali e/o danni meccanici alla
macchina azionata.
• Se richiesto, installate un sistema di frenatura esterno.
Diversamente, c’è pericolo di lesioni personali.
p.3-2
p.3-2
……
p.3-2
• Se un motore viene azionato ad una frequenza superiore allo standard
tipico di 50/60Hz, verificate con i rispettivi costruttori che le velocità del
motore e della macchina siano compatibili con la frequenza massima ……
impostata. Ottenuto il loro consenso, procedete con l’azionamento.
Diversamente, c’è pericolo di danni meccanici alla macchina azionata.
p.3-2
• Verificate i seguenti punti prima e durante il test di marcia della macchina:
Il senso di rotazione è corretto ?
L’inverter è andato in protezione durante l’accelerazione o la
decelerazione ?
Gli indicatori di velocità (Rpm) e frequenza (Hz) erano corretti ?
C’erano vibrazioni o rumori anomali ?
Diversamente, c’è pericolo di danni meccanici alla macchina azionata
……
p.3-2
……
p.5-1
……
p.5-1
4. Manutenzione, ispezione e sostituzione parti.
PERICOLO
• Dopo avere tolto l’alimentazione all’inverter, attendere almeno 10 minuti
prima di effettuare operazioni di manutenzione e ispezione.
Diversamente, c’è pericolo di scossa elettrica..
• Assicuratevi che solo del personale qualificato possa effettuare ispezione,
manutenzione e sostituzione parti all’inverter. (Prima di iniziare il lavoro,
rimuovete dalla vostra persona oggetti metallici personali (orologio da
polso, braccialetti, etc.)
(Assicuratevi che i vostri utensili di lavoro siano protetti con isolamento).
Diversamente, c’è pericolo di scossa elettrica.e/o lesioni personali.
5.Altro.
PERICOLO
• Non modificate mai l’inverter.
Diversamente, c’è pericolo di scossa elettrica.e/o lesioni personali..
xii
Indice
INDICE
Capitolo 1 Descrizioni generali
Descrizione generale ..................................................................................................................1-1
Controllo
1-1
Manuale Operativo
1-1
Domande e garanzia ..................................................................................................................1-2
Risposte
1-2
Garanzia dell’inverter
1-2
Aspetto ..........................................................................................................................................1-3
Aspetto e nome delle parti
1-3
Capitolo 2 Installazione e cablaggi
2.1 Installazione...........................................................................................................................2-1
2.1.1 Installazione
2-2
2.1.2 Coperchio e passaggio cavi
2-4
2.2 Cablaggi.................................................................................................................................2-5
2.2.1 Schemi di collegamento
2-6
2.2.2 Cablaggio del circuito di potenza
2-8
2.2.3 Schemi di collegamento
2-14
2.2.4 Collegamento Digital operator per comando remoto
2-16
Capitolo 3 Operazioni
3.1 Operazioni .............................................................................................................................3-1
3.2Prova di marcia ......................................................................................................................3-4
Capitolo 4 Spiegazione delle funzioni
4.1 Operatore digitale (OPE-SR) ............................................................................................. 4-1
4.2 Lista dei codici delle funzioni .............................................................................................4-5
4.3 Spiegazione delle funzioni ................................................................................................4-11
4.3.1 Modo Monitor
4-11
Monitor della frequenza di uscita, corrente di uscita, direzione di marcia, e segnale di
retroazione del controllo PID ......................................................................................................... 4-11
Monitor degli ingressi programmabili, monitor delle uscite programmabili ......................................... 4-12
xiii
Indice
Monitor con fattore di conversione della frequenza di uscita, monitor della tensione di uscita,
monitor della potenza elettrica in ingresso...................................................................................... 4-13
Monitor contaore di inverter in marcia e di inverter alimentato, monitor del numero totale degli
allarmi intervenuti e degli ultimi 6 allarmi
..................................................................................... 4-14
4.3.2 Modo Funzione ..................................................................................................................... 4-15
Impostazione della frequenza di uscita, senso di marcia, abilitazione/disabilitazione del senso
di marcia e destinazione del comando di frequenza ............................................................... 4-15
Destinazione del comando di marcia, modalità di arresto, abilitazione del tasto di stop............. 4-16
Taratura dei tempi di accelerazione e decelerazione .............................................................. 4-17
Frequenza Base .................................................................................................................. 4-18
Frequenza Massima, Frequenza di modulazione ................................................................... 4-19
Ingressi analogici (0,02,0I)................................................................................................... 4-20
Allineamento tra frequenza di uscita e riferimento esterno (F-Start / F-End) ............................. 4-21
Impostazione del filtro per gli ingressi analogici, Guadagno della tensione di uscita ................ 4-22
Sistema di controllo (Caratteristica V/f).................................................................................. 4-23
Boost di coppia .................................................................................................................... 4-25
Frenatura mediante iniezione di corrente continua (DB)......................................................... 4-26
Limiti di frequenza................................................................................................................ 4-29
Funzione salti di frequenza, Interruzione della rampa di accelerazione .................................. 4-30
Funzione PID (controllo Proporzionale – Integrale –Derivativo) ............................................... 4-31
Funzione di risparmio energetico .......................................................................................... 4-32
Seconda rampa di accelerazione e decelerazione (2CH) ........................................................ 4-33
Profili delle rampe di accelerazione e decelerazione ............................................................. 4-34
Mancanza istantanea di rete / Bassa tensione ....................................................................... 4-35
Selezione della funzione mancanza fase in ingresso, Protezione termica del motore ............... 4-37
Limitazione di sovraccarico / Pre-allarme sovraccarico........................................................... 4-39
Frequenza di minima, Avviamento a tensione ridotta.............................................................. 4-41
BRD - Frenatura dinamica, Selezione di utilizzo del ventilatore di raffreddamento ................... 4-42
Ingressi programmabili ........................................................................................................ 4-43
Selezione della logica degli ingressi (NO / NC), Utilizzo delle Multi-velocità .......................... 4-44
Marcia a impulsi (JG) ........................................................................................................... 4-46
Seconda parametrizzazione (SET)........................................................................................ 4-47
Selezione del blocco software (SFT), Abilitazione forzata dell’operatore digitale (OPE) ............ 4-48
Arresto inerziale (FRS) ........................................................................................................ 4-49
xiv
Indice
Commutazione motore da rete ad inverter (CS) ................................................................... 4-50
Reset (RS) ........................................................................................................................ 4-51
Prevenzione ripartenza motore (USP), Funzione Aumenta / Diminuisci (UP/DOWN) ................ 4-52
Allarme esterno (EXT), comando Marcia / Arresto con autoritenuta (3 fili)................................ 4-53
Impostazione delle uscite programmabili ............................................................................... 4-54
Selezione della logica delle uscite (NO / NC) ........................................................................ 4-55
Uscita segnale di marcia (RUN), Segnale di arrivo in frequenza (FA1, FA2, FA3) ................... 4-56
Tempo di inverter in marcia (RUN) / inverter alimentato (RNT / ONT) ...................................... 4-58
Uscita FM............................................................................................................................ 4-59
Uscite analogiche AM e AMI, Termistore esterno.................................................................... 4-60
Ritorno ai dati di fabbrica...................................................................................................... 4-61
Selezione delle visualizzazioni (visualizzazione ristretta) ........................................................ 4-62
Fattore di stabilizzazione, Gestione errore scheda opzionale, Dati del motore.......................... 4-63
Funzioni della comunicazione seriale .................................................................................... 4-64
4.4 Lista delle funzioni di protezione ............................................................................................... 4-78
4.4.1 Funzioni di protezione.......................................................................................................... 4-78
4.4.2 Visualizzazione degli allarmi (Codici di errore) ...................................................................... 4-81
4.4.3 Visualizzazione degli avvertimenti......................................................................................... 4-82
Capitolo 5 Manutenzione ed ispezione
5.1 Precauzioni per la manutenzione e l’ispezione ...............................................................5-1
5.1.1 Ispezione giornaliera .............................................................................................................. 5-1
5.1.2 Pulizia................................................................................................................................... 5-1
5.1.3 Ispezione periodica................................................................................................................ 5-1
5.2 Ispezione periodica e giornaliera .......................................................................................5-2
5.3 Prova di isolamento con Megger .......................................................................................5-3
5.4 Prova di tensione impressa ................................................................................................5-3
5.5 Metodi per il controllo delle parti di potenza .....................................................................5-4
5.6 Curva tipica della vita dei condensatori ............................................................................5-5
Capitolo 6 Specifiche tecniche
6.1Tavola delle specifiche tecniche ..........................................................................................6-1
6.2 Dimensioni .............................................................................................................................6-2
xv
Indice
Appendici
Appendice A – Impostazioni parametri dell’utente ................................................................A-1
Appendice B – Programmazione delle Funzioni Utente ......................................................B-1
Appendice C – Funzioni modelli Serie HFE2 ........................................................................C-1
xvi
Capitolo 1 Descrizioni generali
1.1 Controlli ispettivi all’apertura dell’imballo
1.1.1 Ispezione dell’inverter
Aprire la scatola e prelevare l’inverter controllando come indicato.
Qualora l’inverter presentasse danneggiamenti segnalare immediatamente al Distributore
Hitachi locale.
(1) Accertarsi che non ci siano danneggiamenti causati dal trasporto
(2) Accertarsi che l’imballo contenga anche il manuale di istruzione
(3) Accertarsi che il prodotto corrisponda a quanto ordinato verificando la potenza del
convertitore riportata sulla targhetta
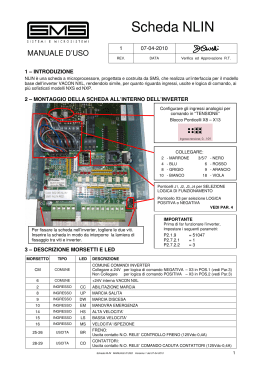
Targhetta identificativa
Figura 1-1 Posizione delle targhette
Modello Inverter
Motore applicabile
Dati di ingresso
Dati di uscita
Numero di serie
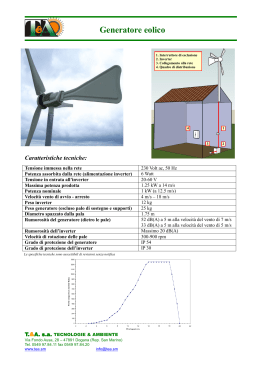
Model:
L300P-110HFE
HITACHI
kW/(HP):
11/(15)
'
Input/Entree:
50Hz,60Hz
Output/Sortie:
MFGNo.
1 Ph
A
50Hz,60Hz
380- 480V
V
3 Ph
24A
0.1- 400Hz
380- 480V
3 Ph
24AAT12345 20001
Hitachi Industrial Equipment
Systems Co.,Ltd.
22A
Date: 0204
MADE IN JAPAN
NE17124-29
Figura 1-2 Contenuto della targhetta identificativa
1.1.2 Manuale operativo
Questo è il manuale operativo degli inverter HITACHI della serie L300P.
Prima di utilizzare l’inverter leggere attentamente il presente manuale tenendolo a
portata di mano per future consultazioni.
Se si utilizzano schede opzionali consultare il relativo manuale di cui è dotata l’opzione.
Questo manuale deve essere consegnato all’utente finale.
1-1
Capitolo 1 Descrizione generale
1.2 Richieste e Garanzia
1.2.1 Informazioni su richiesta specifica
In caso di danneggiamento o per qualsiasi richiesta riguardante gli inverter della serie L300P vi
preghiamo voler contattare il vostro fornitore o il locale centro di distribuzione degli inverter Hitachi
fornendo le seguenti informazioni.
(1) Modello di inverter
(2) Numero di produzione (MFG, NO)
(3) Data di acquisto
(4) Ragione della chiamata
Eventuale elenco delle parti danneggiate
Parti delle quali non si conosce la destinazione d’uso.
1.2.2Condizioni di garanzia
Le condizioni di garanzia sono di un anno dalla data di acquisto
Comunque la garanzia sarà considerata non valida nei seguenti casi:
(1) Uso non corretto dell’inverter o tentativo di riparazione da parte di personale
non autorizzato
(2) Danni subiti a seguito del trasporto (da segnalare immediatamente).
(3) Utilizzo dell’inverter al di fuori dei limiti imposti dalla specifica tecnica
(4) Calamità naturali (temporali, terremoti ecc.)
La garanzia riguarda soltanto l’inverter e non prevede indennizzi per altri componenti
coinvolti nel guasto.
Qualsiasi intervento di riparazione fuori dal periodo di garanzia (un anno) non sarà
coperto. Qualsiasi riparazione effettuata a causa del mancato rispetto delle condizioni
sopra riportate sarà considerata fuori garanzia. Per ulteriori informazioni riguardanti la
garanzia contattate il vostro fornitore o il locale Distributore di inverter HITACHI.
1-2
Capitolo 1 Descrizione generale
1.3 Aspetto
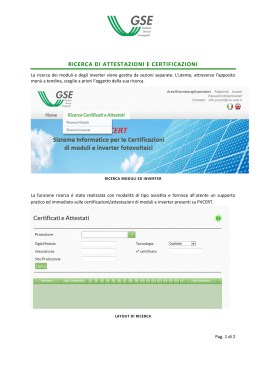
1.3.1Aspetto e nome delle parti
Vista frontale
Vista frontale senza coperchio
POTENZA
Lampada
allarme
Connettore
Spazio per
installazione
delle opzioni
Operatore digitale
Morsettiera di
controllo
Coperchio frontale
Morsettiera di
potenza
Coperchio
morsettiere
Passaggio cavi
Etichetta
identificativa
(Nota) Usando il cavo per remotare l’operatore digitale, prima rimuovete l’adattatore nel connettore
1-3
Capitolo 2 Installazione e cablaggi
2.1 Installazione
PRECAUZIONE
• Per l’installazione dell’inverter utilizzare materiali non infiammabili (metallo ecc..).
Rischio di incendio.
• Non utilizzare materiali combustibili in prossimità dell’inverter.
Rischio di incendio.
• Non trasportare l’inverter sostenendolo dalla parte superiore del coperchio plastico.
Rischio di caduta con danneggiamento dell’inverter e lesioni personali.
• Fare attenzione che rimasugli di saldatura, pezzi di filo di rame, in genere pezzi metallici, polvere
conduttiva, non entrino all’interno dell’inverter.
Rischio di incendio.
• Assicurarsi che la superficie di sostegno dell’inverter abbia le opportune caratteristiche meccaniche per
resistere al peso dell’inverter. (Capitolo 6. Specifiche tecniche).
Rischio di caduta con danneggiamento dell’inverter e lesioni personali.
• Assicurarsi di installare l’inverter su una superficie perpendicolare non soggetta a vibrazioni.
Rischio di caduta con danneggiamento dell’inverter e lesioni personali.
• Non installare, alimentare ed avviare l’inverter se appare danneggiato, o con parti mancanti.
Rischio di lesioni personali per l’operatore.
• Evitare l ’installazione in ambienti con alte temperature, alta umidità, condensa, sporcizia e presenza di
gas corrosivi, gas esplosivi, gas combustibili , aria salmastra. Installare in ambiente chiuso e coperto
evitare l’esposizione a raggi solari e garantire con una buona ventilazione un sufficiente ricambio d’aria.
Rischio di incendio.
2-1
Capitolo 2 Installazione e cablaggi
2.1.1 Installazione
1. Trasporto
l’inverter e costruito con un insieme di parti plastiche maneggiare con cura.
Installare l’inverter su una parete possibilmente metallica e sufficientemente robusta evitando rischi di
caduta dell’inverter. Non utilizzare l’inverter nel caso in cui presenti danneggiamenti o manchino delle
parti.
2. Superficie di montaggio
La temperatura del dissipatore dell’inverter può raggiungere temperature molto elevate (la più alta può
essere di 150°C), pertanto la superficie di montaggio deve essere scelta tenendo in debito conto la
presenza di alte temperature. La superficie di montaggio dovrà essere in materiale non infiammabile
(possibilmente metallo) per evitare il rischio di incendio. Attenzione a mantenere la distanza di rispetto
verso altri dispositivi, specialmente se sono fonti di calore come resistenze di frenatura o induttanze.
Mantenere un sufficiente spazio così
Da non ostacolare la ventilazione
Flusso d’aria
(Nota 1)
(Nota 1)
10cm o più per 1,5-75kW
5cm o più
Inverter
5cm o più
Inverter
30cm o più per 90-132kW
Parete
(Nota 2)
(Nota 2)
10cm o più per 1,5-75kW
30cm o più per 90-132kW
Nel caso si preveda di sostituire i
condensatori elettrolitici, allora:
10cm o più per 1,5-15kW
22cm o più per 18,5-75kW
3. Ambiente - Temperatura ambiente
La temperatura dell’ambiente nel quale l’inverter opera non dovrà eccedere i seguenti valori: da – 10 a
+40°C.
Usando l’inverter ad una temperatura ambiente di 50°C, la corrente nominale di uscita si riduce come a pag.
4-20.
La misura di temperatura dovrebbe essere fatta nelle immediate vicinanze dell’inverter possibilmente dal
lato dell’aspirazione. Si ricord a che più alta è la temperatura di lavoro più si riduce la vita dei componenti che
costituiscono l’inverter in particolare quella dei condensatori di potenza.
4.Ambiente - Umidità
L’umidità dell’ambiente circostante all’inverter si dovrebbe mantenere all’interno dei limiti usuali (dal 20%
al 90%). Assicurarsi che non esista la possibilità di formazione di condensa.
Non installare l’inverter in una posizione dove possa essere investito dai raggi solari.
2-2
Capitolo 2 Installazione e cablaggi
5. Ambiente – Aria
L’aria di aspirazione dell’inverter e presente nell’ambiente circostante dovrà essere pulita e non contenere
gas corrosivi e sporcizia.
6. Posizione di montaggio
Montare l’inverter verticalmente utilizzando viti e rondelle. La superficie di montaggio non dovrà essere
sottoposta a vibrazioni e dovrà supportare agevolmente il peso dell’inverter.
7. Ventilazione per l’installazione in custodia
Se uno o più inverter vengono installati in un armadio elettrico bisognerà prevedere l’utilizzo di una
ventilazione aggiuntiva in modo da garantire un sufficiente ricambio d’aria. La posizione dell’inverter
rispetto al flusso d’aria risulta essere molto importante. Se la posizione è errata, il flusso d’aria diminuisce
e la temperatura intorno all’inverter sale. Assicurarsi che la temperatura nell’intorno dell’inverter rimanga
nei limiti consentiti.
Ventilatore
Ventilatore
aggiuntivo
aggiuntivo
Inverter
Inverter
Buona installazione
Cattiva installazione
8.Raffreddamento esterno dell’inverter
E’ possibile installare l’inverter in modo che il dissipatore sia esterno sporgendo dalla parte posteriore del
contenitore. Questo metodo garantisce due vantaggi: il raffreddamento dell’inverter viene migliorato e le
dimensioni del contenitore possono essere contenute. Per installare il dissipatore esterno è necessario
l’utilizzo dell’opzione denominata “metal fitting” o piastra di adattamento in metallo. Non installare
l’inverter dove possa venire a contatto con acqua, olio, vapori d’olio, farine, polveri e gas corrosivi .
9. Perdite dell’inverter (valori approssimativi)
Potenza dell’inverter(kW)
1.5
2.2
3.7
5.5
7.5
11
15
18.5
22
30
37
45
55
75
90
110
132
70% di carico (W)
102
127
179
242
312
435
575
698
820
1100
1345
1625
1975
2675
3375
3900
4670
100% di carico (W)
125
160
235
325
425
600
800
975
1150
1550
1900
2300
2800
3800
4800
5550
6650
100% Rendimento (%)
92.3
93.2
94.0
94.4
94.6
94.8
94.9
95
95
95
95.1
95.1
95.1
95.2
95.2
95.2
95.2
2-3
Capitolo 2 Installazione e cablaggi
2.1.2 Supporto passa cavi
(1) I cavi dovranno entrare nell’inverter passando attraverso gli appositi manicotti in gomma
I fili dovranno passare dopo aver inciso i manicotti di gomma con una lametta.
Supporto
passa cavi
Manicotti in gomma
(2) Entrata cavi in tubazione
Dopo aver tolto i manicotti di gomma fissare il tubo al supporto.
Nota: Non togliere mai i manicotti in gomma eccetto nel caso in cui i cavi entrano nell’inverter con
tubazione.
I manicotti in gomma servono per proteggere il cavo dalla lamiera tagliente
2-4
Capitolo 2 Installazione e cablaggi
2.2 Cablaggi
PERICOLO
§ Assicurarsi di collegare l’inverter al circuito di terra.
L’inverter se non collegato al circuito di terra, causa il rischio di scosse elettriche e il rischio di
incendio.
§ Per il collegamento dell’inverter valersi dell’impiego di personale qualificato con esperienza specifica
nel settore.
L’impiego di personale non adatto mette a repentaglio la sicurezza del personale medesimo e
causa il rischio di scosse elettriche e incendio.
§ Effettuare i lavori di cablaggio solo dopo aver verificato l’assenza della tensione di alimentazione.
In caso contrario esiste il rischio di scosse elettriche e incendio.
§ Effettuare i lavori di cablaggio solo dopo aver fissato l’inverter in modo sicuro e stabile.
In caso contrario esiste il rischio di scosse elettriche e incendio
• Non rimuovere il passacavo di gomma. (taglie da 1,5 a 75kW)
Nel caso un cavo abbia l’isolante danneggiato, ci può essere un guasto verso terra con il bordo
del coperchio passacavo.
PRECAUZIONE
• Assicurarsi che la tensione di ingresso sia:
Trifase da 200 a 240V 50/60Hz (per i modelli con il suffisso L)
Trifase da 380 a 480V 50/60Hz (per i modelli con il suffisso H)
• Assicurarsi di non alimentare in monofase.
In caso contrario, esiste il rischio di incendio.
• Assicurarsi di non collegare l a tensione di rete ai terminali di uscita (U, V, W).
In caso contrario, esiste il rischio di lesioni personali e incendio.
• Assicurarsi di non collegare la resistenza di frenatura direttamente ai terminali DC (PD,P and N).
In caso contrario, esiste il rischio di incendio.
• Assicurarsi di montare un interruttore differenziale o dei fusibili in ingresso.
In caso contrario, esiste il rischio di incendio.
• Riguardo i conduttori del motore, interruttori differenziali e contattori elettromagnetici, assicurarsi di
usare quelli indicati per quella specifica taglia
In caso contrario, esiste il rischio di incendio.
• Non fermate l’inverter aprendo il contattore elettromagnetico in ingresso o uscita inverter..
In caso contrario, esiste il rischio di lesioni pers onali e danni alla macchina azionata.
• Serrate le viti con la coppia di serraggio.specificata. Verificate che non ci siano viti allentate.
In caso contrario, esiste il rischio di incendio.
2- 5
Capitolo 2 Installazione e cablaggi
2.2.1 Schemi di Collegamento (per ingressi di tipo npn)
Sorgente di alimentazione trifase
R
200-240V+-10%(50,60Hz)-5%)
POWER
S
T
380-480V+-10%(50,60Hz)-5%)
HITACHI
RAN
U
ALARM
M
Hz
V
PRG
kW
A
V
%
R
T (J51)
RO
Barre di c.to circuito
W
MIN
FUNC
1
MAX
2
P
STR
TO
Barretta di corto circuito
Circuito di
frenatura incorporato
1,5 fino a 15 kW
STOP/RESET
RUN
PD
P24
Barra di c.to
Resistenza di
frenatura esterna
opzionale
RB
N
PLC
Morsettiera estraibile
ALO
FW
AL1
Marcia avanti
AL2
5
11A
4
5 ingressi
programmabili
11C
3
DC24V
1
12A
FM
12C
FM uscita di
frequenza
(PWM)
Termistore
DC 0~10V
Uscita a relè programmabile
(funzione iniziale associata: allarme)
DC 0 - 10V (12 bit)
SP
CM1
TH
SN
H
RP
O
SN
DC –10 - +10V (12 bit)
O2
DC 4 -20mA (12 bit)
OI
Uscite programmabili
(2 contatti a relè)
RS485
Resistenza di terminazione
10k
ohm
100
ohm
10k
ohm
DC10V
Opzione 1
L
AM
AM uscita analogica
Opzione 2
0 - 10V (8 bit)
AMI uscita analogica
AMI
4 -20mA (8 bit)
Terra
2- 6-1
Capitolo 2 Installazione e cablaggi
2.2.1 Schemi di Collegamento (per ingressi di tipo pnp, impostazione di fabbrica )
Sorgente di alimentazione trifase
R
200-240V+-10%(50,60Hz)-5%)
POWER
S
T
380-480V+-10%(50,60Hz)-5%)
HITACHI
RAN
U
ALARM
M
Hz
V
PRG
kW
A
V
%
R
T (J51)
RO
Barre di c.to circuito
W
MIN
FUNC
1
MAX
2
P
STR
TO
Barretta di corto circuito
Circuito di
frenatura incorporato
1,5 fino a 15 kW
STOP/RESET
RUN
PD
CM1
Barra di c.to
RB
N
Resistenza di
frenatura esterna
opzionale
PLC
Morsettiera estraibile
P24
ALO
FW
AL1
Marcia avanti
AL2
5
11A
4
5 ingressi
programmabili
11C
3
DC24V
FM uscita di
frequenza
(PWM)
Termistore
DC 0~10V
Uscita a relè programmabile
(funzione iniziale associata: allarme)
DC 0 - 10V (12 bit)
1
12A
FM
12C
SP
CM1
TH
SN
H
RP
O
SN
DC –10 - +10V (12 bit)
O2
DC 4 -20mA (12 bit)
OI
Uscite programmabili
(2 contatti a relè)
RS485
Resistenza di terminazione
10k
ohm
100
ohm
10k
ohm
DC10V
Opzione 1
L
AM
AM uscita analogica
Opzione 2
0 - 10V (8 bit)
AMI uscita analogica
AMI
4 -20mA (8 bit)
Terra
2- 6-2
Capitolo 2 Installazione e cablaggi
(1) Morsettiere di potenza
Simbolo
Funzione
R, S, T
Alimentazione principale
(L1,L2,L3)
U, V, W
(T1,T2,T3)
PD, P
Uscita dell’inverter
Induttanza lato continua
(+1,+)
P, RB
(+,RB)
P, N
(+,-)
G
Resistenza di frenatura
esterna
Frenatura dinamica
esterna
Morsetti di terra
dell’inverter
Spiegazione per l’utilizzo
Collegare l’alimentazione alternata trifase in accordo con la tensione di ingresso indicata sulla
targhetta dell’inverter.
Collegare i tre cavi di collegamento del motore
Rimuovere la barra di corto circuito e collegare l’eventuale induttanza DC.
Collegare l’eventuale resistenza di frenatura esterna.
(modulo di frenatura incorporato fino a 11kW)
Collegare l’unità di frenatura esterna (opzionale)
(inverter L300P da 15 kW in poi non incorporano il modulo di frenatura)
Collegare il conduttore di terra (carcassa metallica dell’inverter).
(2) Morsettiere di controllo
Analogiche
Impostazione di frequenza
Alimentazione
del
potenziometro
Simbolo
Funzione
L
Comune
H
Alimentazione
O
Ingresso analogico in tensione
del riferimento di frequenza
Spiegazione per l’utilizzo
E’ il comune del riferimento analogico degli ingressi analogici O,O2 e O1 e anche delle uscite analogiche AM ed AM1.
Non collegare a terra.
E’ l’alimentazione +10V per il potenziometro del riferimento di frequenza.
Massima corrente 20 mA
Fornendo un segnale 0-10V dc si ottiene una frequenza di uscita inverter
Impedenza di ingresso
proporzionale. Con 10 V si raggiunge il valore di frequenza impostato in A004
eventualmente limitato con A014.
Ingresso analogico in tensione di
O2
correzione del riferimento di
frequenza
OI
Monitor
AM
AMI
Alimentazione
FM
P24
CM1
Ingresso analogico in corrente
del riferimento di frequenza
Uscita analogica in tensione
(programmabile)
Uscita analogica in corrente
(programmabile)
principale sia esso in tensione (O) sia esso in corrente (OI)
Fornendo un segnale 4-20 mA si ottiene una frequenza di uscita inverter
Impedenza di ingresso
100 ohm
Corrente assorbita 24mA
Forniscono in uscita un segnale continuo proporzionale alla funzione
Massimo carico di corrente
2mA
assegnata. Elenco funzioni assegnabili: frequenza e corrente di uscita, coppia,
tensione in uscita, potenza assorbita e condizione termica del motore,
Impedenza non superiore a
frequenza in limitazione LAD.
250 ohm
modulata a PWM oppure digitale
Uscita “analogica” a segnale modulato a PWM con funzioni assegnabili come
(programmabile)
descritto per le altre uscite analogiche (vedi qui sopra) .
Alimentazione dell’interfaccia I/O
Fornisce l’alimentazione 24V dc per gli ingressi digitali.
Massima corrente
1.2mA
Frequenza massima 3.6khz
Massima corrente uscita
100mA
E’ il comune dell’alimentazione degli ingressi FW, 1-8 ,TH ed FM
Non collegare a terra
Ingresso di selezione logica
Determina il tipo di logica da utilizzare per gli ingressi (npn,pnp)
(npn, pnp)
Barra di corto circuito fra P24 e PLC = npn, fra CM1 e PLC = pnp
Comando di marcia avanti
inverter (normalmente coincide con rotazione oraria – visto dall’uscita albero
motore – come dall’interno del rotore). Chiuso = marcia avanti.
Ingressi
programmabili
Ingressi
Segnali digitali
10k ohm
Corrente assorbita 20 mA
L’ingresso è reso attivo dalla chiusura dell’ingresso di abilitazione AT
Fornisce il comando di marcia con successione delle fasi U,V, W in uscita
FW
Impedenza di ingresso
proporzionale. Con 20mA si ha la massima frequenza impostata in A004.
Uscita digitale (onda quadra) proporzionale alla frequenza di uscita inverter.
P24 per l’interfaccia I/O
PLC
Fornendo un segnale 0 +/-10V si attua una correzione sul riferimento
Uscita analogica in tensione
Comune dell’ alimentazione
10k ohm
Tensione massima 12V dc
Tensione massima 27V dc
Input ON per tensione
superiore a 18V dc.
Input OFF per tensione
1-2-3-4-5
Ingressi programmabili
Sono assegnabili 5 diverse funzioni a scelta fra le 33 disponibili.
Nota: ogni funzione può essere assegnata ad un solo terminale di ingresso.
inferiore a 3V dc
Impedenza di ingresso 4.7k
ohm
Sensore
Analogico
Uscite
Relè allarme e Uscite
Tensione max. 250V AC
11A
11C
12A
12C
Uscite programmabili
Selezionare 2 funzioni dalle 13 disponibili assegnandole ai 2 terminali
disponibili (Le uscite sono a relè)
Tensione max . 30VDC
Tensione min. 1VDC
( 0,5A carico ohmico )
( 1A carico induttivo )
AL1
AL2
Uscita di allarme
AL0
Comune del relè di allarme
TH
Ingresso termistore
Normalmente usato come funzione di uscita allarme generico.
Qualsiasi altra funzione di uscita può essere comunque assegnata.
Comune del contatto in scambio dell’uscita a relè.
Fra i morsetti TH 1 CM1 è possibile collegare un termistore per protezione del
motore. In seguito all’intervento del termistore l’inverter si arresta.
.
2- 7
Tensione massima
AC250V, 0.2A
Tensione minima
AC100V,10mA
Minima potenza del termistore
ammessa 100mW
Capitolo 2 Installazione e cablaggi
2.2.2 Cablaggi del circuito di potenza
(1) Avvertenze sui cablaggi
Dovendo scollegare un inverter dopo aver tolto tensione attendere almeno 10 minuti prima di rimuovere il
coperchio. Dopo aver tolto il coperchio assicurarsi che la lampada di “condensatori carichi” (charge lamp) non
sia illuminata.
Prima di procedere è sempre necessario verificare che non ci sia tensione né sulla parte alternata (R,S,T) né
sulla parte continua (P,N) utilizzando un voltmetro.
1. Morsetti della alimentazione di potenza (R, S, T)
Collegare i morsetti dell’alim entazione di potenza (R, S,T) alla rete di alimentazione passando attraverso il
contattore elettromagnetico e l’interruttore di potenza.
Raccomandiamo l’uso di un contattore elettromagnetico in modo da garantire l’isolamento galvanico fra la rete e
il motore nelle situazioni di emergenza o in caso di manutenzione.
Gli inverter della serie L300P sono progettati per alimentazioni trifase, non esistono modelli standard previsti per
alimentazione monofase. Nel caso fosse richiesto un modello con alimentazione monofase, contattateci.
· Non utilizzate gli eventuali contattori di ingresso o uscita inverter come normale strumento di manovra del
motore: utilizzate i terminali di marcia (FW/RV).
· In configurazione standard (vedi schemi a pag. 2-6-1 o 2-6-2), nel caso m anchi una fase della tensione di rete
e la protezione per mancanza fase in ingresso sia stata disattivata, l’inverter si comporta come segue:
Fase R oppure fase T aperta: manca l’alimentazione alla scheda di controllo e l’inverter non funziona.
Fase S aperta: l’inverter funziona con alimentazione monofase : si possono determinare blocchi per
sottotensione o sovracorrente. Non utilizzate l’inverter in questa condizione.
· Il modulo raddrizzatore potrebbe danneggiarsi in una delle seguenti situazioni:
Quando lo sbilanciamento delle fasi della rete di alimentazione supera il 3%.
Quando la potenza della rete supera di 10 volte la potenza dell’inverter e comunque oltre i 500KVA.
Quando si verifica una brusca variazione della tensione di alimentazione, come per esempio:
Quando si verifica un corto sulla rete di alimentazione.
Inserendo o disinserendo i condensatori di un sistema di rifasamento..
· Non inserite e disinserite la rete di alimentazione per più di 3 volte in un minuto, l’inverter potrebbe
danneggiarsi.
Filtri EMC di ingresso inverter sono disponibili, eventualmente contattateci.
2. Morsetti di uscita dell’inverter (U, V, e W)
- Utilizzare cavi di sezione adeguata così da limitare il più possibile la caduta di tensione, in particolare questo
aspetto risulta fondamentale nel caso di frequenze di lavoro molto basse dove la caduta di tensione potrebbe
penalizzare la coppia al motore.
- Non collegare condensatori di rifasamento o varistori in uscita all’inverter - l’inverter potrebbe danneggiarsi.
- Nel caso che la lunghezza del cavo del motore superi i 20 metri potrebbe rendersi necessario l’uso di
un’induttanza di uscita, così da limitare le sovratensioni al motore causate dalle capacità naturali del cavo.
Questo fenomeno è particolarmente rilevante per la classe 400V .
· In caso siano collegati 2 o più motori, installate un relè termico su ogni motore.
· Tarate la termica del relè per un valore di 1.1 volte la corrente nominale del motore.
· Installate una induttanza di uscita se la lunghezza cavi lo richiede (eventualmente contattateci).
2- 8
Capitolo 2 Installazione e cablaggi
3. Induttanza lato corrente continua (DCL) collegare ai morsetti (PD, P)
· L’induttanza sulla continua può essere utilizzata per migliorare il fattore di potenza.
· I due morsetti per il collegamento dell’induttanza sono corto circuitati in fabbrica mediante una barra di c.to
circuito. Per il collegamento dell’induttanza scollegare la barra di c.to circuito.
· Se l’induttanza DCL non viene utilizzata non rimuovere la barra di corto circuito.
4. Collegamento della resistenza esterna di frenatura (P, RB)
-
L’unità di frenatura dinamica (BRD) è incorporata standard per gli inverter L300P fino a 15 kW.
-
Quando è richiesto l’uso della frenatura bisogna collegare una resistenza esterna ai morsetti (P,RB).
-
La lunghezza del cavo di collegamento della resistenza esterna non deve superare i 5 metri, intrecciare i
cavi di collegamento per ridurre l’induttanza del circuito di frenatura.
-
A questi morsetti non collegare nessun altro dispositivo o unità di frenatura esterna.
-
La resistenza di frenatura deve avere un valore idoneo (vedi specifiche manuale).
5. Collegamento dell’unità di frenatura dinamica esterna.
Gli inverter L300P di potenza superiore a 15 kW non sono dotati di modulo di frenatura incorporato (BRD).
-
Se è richiesta la frenatura dinamica bisognerà utilizzare un unità di frenatura esterna (opzionale) dotata
della propria resistenza di frenatura (opzionale).
Collegare l’unità di frenatura esterna fra i morsetti (P ed N). La resistenza di frenatura dovrà quindi essere
-
collegata direttamente alla unità esterna, non all’inverter.
I cavi di collegamento dovranno essere meno di 5 metri e vanno intrecciati al fine di ridurre l’induttanza.
-
6. Circuito di terra (G
)
-
Assicurarsi che l’inverter e il motore siano collegati al circuito di terra al fine di prevenire scosse elettriche.
-
La connessione a terra deve essere fatta nel rispetto delle norme vigenti..La mancanza del collegamento di
terra all’inverter e al motore costituisce rischio di scosse elettriche.
2- 9
Capitolo 2 Installazione e cablaggi
(2) Morsettiere di potenza
La seguente tabella descrive la disposizione e il tipo di vite dei morsetti di potenza.
Rappresentazione delle morsettiere per tipo di inverter
R
(L1)
S
(L2)
T
(L3)
U
(T1)
V
(T2)
Inverter corrispondente
W
(T3)
L300P-015-037LF
L300P-015-037HF
Ro-To: M4
Altri: M4
Ro
PD
(+1)
To
P
(+)
N
(-)
RB
G
G
L300P-055LF/HF
Barra di corto
circuito
Charge lamp
Ro-To: M4
(lampada condensatori Altri: M5
carichi)
L300P-075LF/HF
R
(L1)
S
(L2)
T
(L3)
U
(T1)
V
(T2)
PD
(+1)
P
(+)
N
(-)
RB
G
W
(T3)
Ro
G
Ro-To: M4
Altri: M6
Charge lamp
(lampada condensatori carichi)
Ro
R
(L1)
S
(L2)
T
(L3)
Ro-To: M4
Altri: M5
L300P -110LF/HF
L300P -150LF/HF
Barra di corto
circuito
G
To
PD
(+1)
P
(+)
To
Charge lamp
(Lampada condensatori carichi)
N
U
V
W
G
(-)
(T1)
(T2)
(T3)
L300P-185LF
L300P-185-370HF
Ro-To: M4
Altri: M6
L300P-370LF
L300P-450-750HF
Ro-To: M4
Altri: M8
Barra di corto circuito
L300P-220-300LF
Ro
To
Charge lamp
(Lampada condensatori carichi)
R
(L1)
S
(L2)
T
(L3)
PD
(+1)
P
(+)
N
(-)
U
(T1)
V
(T2)
Ro-To:
M4
Morsetto di terra: M6
Altri:
M8
L300P-450-550LF
W
(T3)
Ro-To:
M4
Morsetto di terra: M6
Altri:
M10
L300P-750LF
L300P-900-1320HF
Ro-To:
M4
Morsetto di terra: M8
Altri:
M10
Barra di corto
circuito
2- 10
Capitolo 2 Installazione e cablaggi
(3)Schema generale di collegamento
vedere [(4) Tabella di dimensionamento dei dispositivi esterni all’inverter
Nota1: I dati contenuti in questo paragrafo (3) e nel successivo (4) sono relati vi all’utilizzo di un
motore asincrono HITACHI a quattro poli
Nota2: La selezione dell’interruttore andrà fatta sulla base della potenza dell’inverter.
(Nota 3) Usare interruttori differenziali (ELB )se le norme lo richiedono.
(Nota 4) Usare filo elettrico di rame con temperatura di esercizio 60/75 °C.
ELB
(Nota 5): Se la lunghezza dei cavi di potenza supera i 20 metri, maggiorare la sezione dei cavi.
(Nota 6): Per il circuito relativo al contatto di allarme usare sezioni di 0.75mm2
(Nota 7) La scelta della sensibilità del differenziale deve essere fatta in base alla lunghezza
totale del cavo di collegamento del motore
Lunghezza cavi
Sensibilità del differenziale
(mA)
100m o meno
50
300m o meno
100
(Nota 8) Usando cavo CV e rigide condotte metalliche, le perdite aumentano.
(Note 9) Il cavo tipo IV ha elevata costante dielettrica. Le perdite aumentano di 8 volte.
Pertanto, scegliete un ELB con una corrente di scatto 8 volte maggiore. E se la distanza
è oltre i 100m, usate un cavo tipo CV.
Contattore
elettromeccanico
Nome
Induttanza di linea(controllo
armonico, coordinamento elettrico,
miglior fattore di potenza)(ACL-***)
R
S
T
PD
Alimentazione
R0
Inverter
P
RB
Funzione
E’ utilizzata quando la rete di alimentazione ha una asimmetria di tensione
superiore al 3% e la potenza della rete è superiore a 500kVA e si prevedono
bruschi cambiamenti della tensione. Migliora il fattore di potenza.
Filtro contro i radio disturbi
(Toroide)(ZCL-*)
Filtro di linea
(JF-***)
Filtro contro i radio disturbi
(Filtro capacitivo)(CFI-*)
Serve per ridurre i radio disturbi.
Induttanza in continua(DCL-*-**)
Migliora il contenuto armonico della corrente assorbita dall’inverter.
Resistenza di frenatura
Unità di frenatura
Sono usate per arrestare in modo rapido carichi fortemente inerziali.
Filtro anti disturbo di uscita(ACF-C*)
Riduce il disturbo irradiato prodotto dai cavi di collegamento fra inverter e
Riduce i disturbi generati dall’inverter e condotti dalla linea e dalla terra
mantenendo un buon grado di immunità della linea di alimentazione.
Riduce i disturbi irradiati dai cavi dell’inverter
N
T0
motore che potrebbe disturbare sensori o altri dispositivi.
U
V
W
Filtro contro i radio disturbi
(Toroide(ZCL-***)
Induttanza di uscita
(ACM-*-**)
Riduce i disturbi generati all’uscita dell’inverter
Riduce notevolmente la fluttuazione di coppia dovuta al controllo con
inverter. Riduce quindi le vibrazioni del motore. L’effetto di questo
componente è tanto più efficace quanto più è lungo il cavo di collegamento
fra inverter e motore. Può rendersi indispensabile quando si debba utilizzare
un relè termico elettromeccanico esterno, in quanto a causa dell’alta
frequenza di modulazione potrebbero verificarsi interventi intempestivi.
Filtro LCR
Questo filtro consente di rendere la forma d’onda di tensione in uscita
sinusoidale.
M
Motore
2- 11
Capitolo 2 Installazione e cablaggi
2
2
3.5
5.5
5.5
5.5
5.5
-
14
14
10
8
8
8
8
-
M4
M4
M4
M5
M5
M6
M6
M6
M8
M8
6
-
-
M8
3/0
6
-
-
M10
80
3/0
4
-
-
M10
(#3)
100
4/0
4
-
-
M10
18
16
14
12
10
8
6
6
4
3
1
1
1/0
1.25
1.25
1.25
2
3.5
5.5
8
14
14
22
22
22
30
16
16
16
14
10
8
8
4
4
3
3
1
1
14
14
14
14
12
10
10
10
10
10
8
8
6
2
2
2
2
3.5
5.5
5.5
-
18
16
14
12
10
8
8
-
M4
M4
M4
M5
M5
M6
M6
M6
M6
M6
M6
M8
M8
(#2)
50
1/0
6
-
-
M8
(#2)
(#3)
50
80
1/0
3/0
6
4
-
-
(#3)
100
4/0
4
-
-
Linee di potenza
R,S,T,U,V,
Motore
Tipo inverter
(kW)
200V class
mm
o più
L300P-015LF
L300P-022LF
L300P-037LF
L300P-055LF
L300P-075LF
L300P-110LF
L300P-150LF
L300P-185LF
L300P-220LF
L300P-300LF
2
2
3.5
5.5
8
14
22
30
38
60
100
L300P-370LF
(38x2)
100
L300P-450LF
(38x2)
150
L300P-550LF
(60x2)
150
L300P-750LF
(60x2)
L300P-015HF
2
L300P-022HF
2
L300P-040HF
2
L300P-055HF
2
L300P-075HF
3.5
L300P-110HF
5.5
L300P-150HF
8
L300P-185HF
14
L300P-220HF
14
L300P-300HF
22
L300P-370HF
38
L300P-450HF
38
L300P-550HF
60
100
L300P-750HF
(38×2)
L300P-900HF
38×2
L300P-1100HF 60×2
37
45
55
400V class
75
1.5
2.2
4.0
5.5
7.5
11
15
18.5
22
30
37
45
55
75
90
110
L300P1320HF
132
G
W,P,PD,N
2
1.5
2.2
3.7
5.5
7.5
11
15
18.5
22
30
Conduttore di terra
80×2
tra P e RB
AWG
o più
mm
o più
AWG
o più
AWG
o più
(#6)
14
14
10
8
6
4
2
1
1/0
2/0
1.25
1.25
3.5
5.5
8
14
22
22
30
30
16
16
10
8
8
4
3
3
2
2
14
14
12
10
10
10
8
8
8
6
(#1)
50
1/0
(#2)
80
(#3)
2
Resistenza di
Frenatura
#1
3/0 o 2 in parallelo da 1 AWG
#2
250kcmil o 2 in parallelo da 1 AWG(75 °C.)
#3
#4
350kcmil o 2 in parallelo da 1/0 AWG
2 in parallelo da 2/0 AWG
mm
2
Dispositivi esterni
Coppia
Terminali
AWG
Dimensione viti
dei terminali
(4) Tabella dei dispositivi esterni all’inverter e sezione dei cavi di collegamento
Di serrag-
Contattore
Interruttore
Telerutto
gio
max
differenziale
re o
(N•m)
(ELB)
fusibili
1.5
1.5
1.5
2.5
2.5
4.9
4.9
4.9
8.8
8.8
EX30(15A)
EX30(20A)
EX30(30A)
EX50B(50A)
EX60B(60A)
RX100(75A)
RX100(100A)
RX100(100A)
RX225B(150A)
RX225B(200A)
10A
15A
20A
30A
40A
60A
70A
90A
100A
150A
H10C
H20
H20
H25
H35
H50
H65
H80
H100
H125
8.8
RX225B(225A)
175A
H150
13.7
RX225B(225A)
200A
H200
13.7
RX400B(350A)
250A
H250
13.7
RX400B(350A)
300A
H300
1.5
1.5
1.5
2.5
2.5
4.9
4.9
4.9
4.9
4.9
4.9
8.8
8.8
EX30(10A)
EX30(10A)
EX30(15A)
EX50C(30A)
EX50C(30A)
EX50C(50A)
EX60B(60A)
EX60B(60A)
RX100(75A)
RX100(100A)
RX100(100A)
RX225B(150A)
RX225B(175A)
10A
10A
15A
15A
20A
30A
35A
50A
50A
70A
80A
100A
125A
H10C
H10C
H20
H20
H20
H25
H35
H50
H50
H65
H80
H100
H125
Elettromagnetico
(MC)
8.8
RX225B(225A)
150A
H150
M10
M10
2-4
2-4
3.5-4
5.5-5
8-5
14-6
22-6
30-6
38-8
60-8
100-8
(38-8)
100-10
(38-10)
150-10
(60-10)
150-10
(60-10)
2-4
2-4
2-4
2-5
3.5-5
5.5-6
8-6
14-6
14-6
22-6
38-6
38-8
60-8
100-8
(38-8)
38-10
60-10
13.7
13.7
RX225B(225A)
RX400B(350A)
200A
250A
H200
H250
M10
80-10
13.7
RX400B(350A)
300A
H250
#5 Use suitable fuse with an UL-listed for UL.
#6 Conformity to the UL
Note : i fili di collegamento dovranno essere muniti di opportuno capicorda crimpato con a pposita pinza.
Nota per export negli USA:
Field wiring must be made by an UL-listed and CSA-certified closed-loop terminal connector sized for the wire gauge
involved. Connector must be fixed by using the crimping tool specified by the connector manufacture or equivalent
wording included in the manual.
WARNING
Use suitable circuit breaker or fuse listed in this manual for UL’s listing purpose.
Otherwise, there is a danger of fire.
2- 12
Capitolo 2 Installazione e cablaggi
5) Alimentazione separata dei circuiti di controllo e dei circuiti di potenza
Esiste la possibilità di alimentare i circuiti di potenza separatamente dai circuiti di controllo. In questo caso
anche quando l’alimentazione principale dell’inverter viene interrotta il controllo resta alimentato consentendo
così di ricevere comunque informazioni circa lo stato dell’inverter (esempio: allarmi).
I morsetti marcati come Ro e To sono i morsetti di alimentazione del controllo.
L’inverter viene consegnato con i morsetti Ro e To collegati internamente a R e T realizzando così l’alimentazione
contemporanea della potenza e del controllo
Le due alimentazioni possono essere eventualmente separate scollegando i due fili cosi come indicato, e collegando
i due morsetti R0 e T0 alla linea a monte del teleruttore.
[1] Rimuovere i fili da Ro, To .
[3] collegare l’alimentazione ai morsetti Ro e To
Specifica della tensione di alimentazione per Ro e To:
200~ 240V±10%(50/60Hz±5%)
[2] Estrarre il connettore J51
(DC282~ 339V)
380~ 480V±10%(50/60Hz±5%)
(DC537~ 678V)
J51
Nel cablare separatamente l’alimentazione del controllo (R0-T0) e del circuito di potenza (R,S,T) inserite almeno un
fusibile da 3A a protezione della linea di alimentazione del controllo.
2- 13
Capitolo 2 Installazione e cablaggi
2.2.3 Schemi di collegamento
(1) Cablaggi
1. Entrambi i comuni L e CM1 sono isolati dal circuito di potenza e dal circuito di terra.
Si raccomanda di non collegare questi due terminali al circuito di terra.
2.
Per i circuiti dei segnali logici di ingresso e di uscita utilizzare cavo schermato e intrecciato .
Lo schermo dovrà essere collegato ai morsetti dei comuni (L,CM1). La sezione di cavo raccomandata
per i collegamenti di segnale è 28 AWG(0.75 mm2).
3.
La distanza massima a cui è possibile portare i segnali logici è di 20 metri. Per distanze superiori
utilizzare dispositivi di amplificazione isolati.
4.
Separare i circuiti di segnale da quelli di potenza e dei relè di controllo.
5.
Se i cavi dei circuiti di potenza e di segnale devono incrociarsi, fare l’incrocio con un angolo di 90°.
6.
Quando viene utilizzato il termistore collegato fra i terminali TH e CM1 il cavo del termistore deve avere
un percorso separato dagli altri segnali. Si raccomanda l’uso di cavo intrecciato.
TH FW
Altri segnali
8 CM1
PLC CM1 7
6
Termistore
7.
Se per il circuito di ingresso vengono utilizzati comandi provenienti da relè si raccomanda di utilizzare
relè adatti per segnali deboli possibilmente a 24 V dc.
8.
Quando le uscite sono collegate a relè si raccomanda di prevedere un diodo in antiparallelo alla bobina
così da evitare sovratensioni in fase di manovra .
9.
Non corto - circuitare i terminali H ed L ed i terminali P24 e CM1. Esiste il rischio di danneggiare
l’inverter.
(2) disposizione della morsettiera di comando
H
L
O2
O
AM
OI
AMI
FM
TH
P24
FW
PLC
5
CM1
4
12C
3
12A
2
11C
1
11A
AL1
ALO
AL2
Dimensione delle viti; M3
2- 14
Capitolo 2 Installazione e cablaggi
(3) Cambio della logica dei segnali di ingresso
La logica dei terminali programmabili di ingresso viene predisposta in fabbrica come da tabella:
L300P – xxx LFR / HFR
L300P – xxx LFU / HFU
L300P – xxx HFE
Tipo NPN
Tipo NPN
Tipo PNP
La logica dei terminali può essere cambiata modificando la connessione del ponticello sulla morsettiera dei
terminali di controllo come specificato nella tabella qui sotto:
Tipo NPN
Tra P24 e PLC – il terminale si attiva chiudendolo a CM1
Tipo PNP
Tra PLC e CM1 – il terminale si attiva chiudendolo a P24.
(4) Collegamento ad un PLC (Logica programmabile)
Modulo di interfaccia alimentato da inverter
(Togliere la barretta di cortocircuito)
Alimentazione esterna
P24
S
S
P24
Barra di
corto circuito
PLC
PLC
DC24V
DC24V
CM1
CM1
FW
Tipo npn
FW
8
8
DC24V
COM
COM
Modulo di uscita tipo
Inverter
EH-YTR48
Inverter
COM
P24
DC24V
DC24V
PLC
Tipo pnp
Barra di
corto circuito
P24
COM
DC24V
PLC
CM1
CM1
FW
FW
8
8
Modulo di uscita tipo
EH-YTS48
S
S
Inverter
2- 15
Inverter
Capitolo 2 Installazione e cablaggi
(5) Collegamento delle uscite con un PLC (Logica programmabile)
CM2
11
DC24V
Modulo di
ingresso tipo
XDC24D2H
COM
12
Tipo pnp
Tipo npn
11
COM
12
DC24V
CM2
Modulo di ingresso
tipo XDC24D2H
Inverter
Inverter
2.2.4 Collegamento remoto dell’operatore digitale
Per comandare l’inverter in remoto, si può montare a distanza un operatore digitale del tipo OPE-SR , OPE-SRE,
OPE-S, SRW-0J e SRW-0EX. Estrarre l’operatore digitale esistente a bordo dell’inverter e usare un cavo di
connessione ICS-1(1m) oppure ICS-3(3m).
(Note 1) Realizzando un cavo di connessione, si raccomanda che la lunghezza del cavo stesso non superi i 3m.
Diversamente, si possono verificare dei malfunzionamenti dell’operatore digitale.
(Note 2) In caso di comando remoto con il cavo di interconnessione, la soluzione di conformità EMC alle norme
europee certificata da Hitachi decade.
2- 16
Capitolo 3 Operazioni
PERICOLO
• Assicuratevi di non toccare i terminali di potenza o non lasciare terminali di segnale o connettori scollegati,
Pericolo di scossa elettrica.
• Assicuratevi di avere chiuso il coperchio frontale prima di applicare la tensione di alimentazione.
Con l’inverter alimentato, non aprite il coperchio frontale.
Pericolo di scossa elettrica.
• Non manovrate gli interruttori con le mani umide.
Pericolo di scossa elettrica..
• Con l’inverter alimentato, non toccate i terminali nemmeno durante l’arresto.
Pericolo di scossa elettrica.
• Se la funzione di riavvio automatico è attivata, il motore potrebbe improvvisamente ripartire dopo un
arresto per blocco. Non avvicinatevi alla macchina azionata. (Verificate che la macchina sia progettata in
modo da garantire la sicurezza del personale anche in caso di riavvio automatico).
Pericolo di lesioni personali.
• Non selezionate la funzione di riavvio automatico per macchine di sollevamento o di translazione,, dato che
prima del riavvio automatico l’uscita dell’inverter si trova in “Free Running Mode” (il motore è lasciato libero
di ruotare).
Pericolo di lesioni personali e danni alla macchina azionata.
• In caso di una temporanea mancanza di alimentazione, l’inverter può riavviare il motore se il comando di
marcia è attivo. Può costituire pericolo per il personale, assicuratevi che il circuito di comando sia tale da
non comandare la marcia al ritorno della tensione di alimentazione.
Pericolo di lesioni personali.
• Il pulsante di Stop sull’operatore digitale fu nziona effettivamente se la sua funzione è attivata. Utilizzate
questo pulsante separatamente dall’arresto di emergenza.
Pericolo di lesioni personali.
• Con il comando di marcia attivo, se viene resettato un allarme l’inverter riavvia immediatamente il m otore.
Assicuratevi che il comando di Reset sia dato con il comando di marcia disattivato
Pericolo di lesioni personali.
• Non toccate le parti interne di un inverter alimentato, direttamente o utilzzando barre metalliche
Pericolo di scossa elettrica e di incendio.
3-1
Capitolo 3 Operazioni
ATTENZIONE
• Le alette di raffreddamento del dissipatore possono raggiungere temperature elevate. Non toccatele.
Pericolo di ustioni.
• L’inverter può essere facilmente regolato per azionare il motore a velocità basse oppure alte. Assicuratevi
che questo avvenga rispettando le tolleranze del motore e della macchina azionata.
Pericolo di lesioni personali.
• Installate un dispositivo di frenatura esterno, se richiesto.
Pericolo di lesioni personali.
• Prima di azionare il motore a frequenze superiori alla frequenza di rete (50Hz/60Hz), interpellate i
costruttori del motore e della macchina azionata per avere il loro consenso..
Pericolo di rottura della macchina.
• Prima e durante le prove di azionamento, verificate quanto segue:
Pericolo di rottura della macchina.
Il senso di rotazione del motore è corretto ?
L’inverter va in blocco durante l’accelerazione o la decelerazione ?
Le indicazioni di velocità motore e frequenza sono corrette ?
Si sono verificati rumori o vibrazioni anormali ?
3-2
Capitolo 3 Operazioni
3.1 Operazioni
L’inverter per poter operare ha bisogno di ricevere almeno due comandi fondamentali quello di marcia e quello di
frequenza. Questi comandi possono essere forniti in almeno tre modi diversi che di seguito vengono descritti.
(1) Comando di marcia e comando di frequenza dall’esterno.
In questo caso viene richiesto l’utilizzo, per i comandi di frequenza e di marcia, di un circuito esterno.
L’inverter comincia a operare quando è alimentato e uno dei due comandi (FW o RV) vi ene attivato (contatto fra
comune e FW o RV viene chiuso) . Deve essere collegato anche il riferimento di frequenza da potenziometro
esterno o da segnale analogico.
(Nota).I dettagli sono riportati.nella lista dei terminali di controllo.
Per operare:
[1] Comando esterno di marcia con interruttore o con contatto di relè ecc.
[2] Riferimento di frequenza mediante potenziometro o segnale analogico (DC O-10V, DC -10+10V, 4 -20mA
ecc.)
Morsettiera
Comando di marcia
Potenziometro
(2) Comandi di marcia e di frequenza da operatore digitale (tastiera).
Con questo metodo è possibile operare con l’inverter utilizzando la tastiera standard o quella avanzata (SRW).
Con un’opportuna programmazione vengono abilitati i comandi da tastiera in questo caso non è più necessario
utilizzare i comandi (FW o RV) da morsettiera.
Per la frequenza potrà essere utilizzata l’impostazione digitale .
Per operare):
[1] Operatore digitale (standard in dotazione oppure SRW)
Lampada
alimentazione
Potenziometro
Operatore
digitale
(3) E’ anche possibile destinare il comando di frequenza e il comando di marcia uno dall’esterno e l’altro dalla
tastiera o viceversa.
3-3
Capitolo 3 Operazioni
3.2 Prova di marcia
Questo è un esempio generale di collegamento . Per dettagli sull’uso dell’operatore digitale riferirsi al
capitolo4.1 Operatore digitale (OPE-SR).
(1) Esempio di comandi di marcia e di frequenza dalla morsettiera logica (collegamenti per ingressi npn vedi
pgg.2-6,2-6A)
ELB
Alimentazione
trifase
R
R
U
S
S
V
T
T
W
FW
8 Operatore digitale
(RV)
1
FM
PD
P
RB
TH
Cassetta dei
comandi
CM1
PLC
O
L
Induttanza DC
Unità di
Uscita Relè
Contatto di allarme
15
P24
.….
H
N
AL0
AL1
AL2
Motore
H
O
OI
O2
AM
AMI
L
SP
SN
11
RP
G
SN
Morsetto di
terra
(Procedura)
[1] Verificare che i collegamenti siano eseguiti in modo corretto e sicuro
[2] Chiudere ELB ed alimentare l’inverter
(Il LED rosso “POWER” sull’operatore digitale deve essere acceso)
[3] Impostare la destinazione del riferimento di frequenza
Selezionare A001 e premere una volta il tasto
Impostare 01 utilizzando i tasti
1
2
. (compaiono due campi numerici )
FUNC
, premere una vol ta il tasto
STR
si è così destinato il comando di
frequenza da ingresso analogico esterno (la visualizzazione tornerà su A001)
[4] Impostare la destinazione del comando di marcia
Selezionare A002 e premere una volta il tasto
Impostare 01 utilizzando i tasti
1
2
. (compaiono due campi numerici )
FUNC
, premere una volta il tasto
STR
si è così destinato il comando di
marcia dall’esterno (la visualizzazione tornerà su A002)
[5] Impostazione delle visualizzazioni di controllo
Per visualizzare la frequenza di uscita impostare il codice in d001, e premere una volta il tasto
FUNC
Per visualizzare la frequenza di uscita impostare il codice in d003, e premere una volta il tasto
FUNC
[6] Manovra di marcia
Chiudere il contatto fra i morsetti [FW] e [CM1] .
Applicare una tensione 0-10 V dc tra i morsetti [ O ] e [ L ] per controllare la velocità di rotazione del
motore.
[7] Manovra di arresto.
Aprire il contatto fra i morsetti [ FW ] e [ CM ] per l’arresto con decelerazione.
3-4
Capitolo 3 Operazioni
(2) Operazioni di marcia e arresto dall’operatore digitale.
(anche il copiatore (SRW) si utilizza nello stesso modo.)
ELB
alimentazione
trifase
R
R
U
S
S
V
T
T
W
----
FW
8 Operatore digitale
1
FM
TH
CM1
PLC
PD
P
RB
N
AL0
AL1
AL2
Motor
Induttanza DC
Unità di frenatura
Uscita Relè
Contatto di allarme
…….
15
P24
H
O
OI
O2
AM
AMI
L
11
SP
SN
RP
SN
G
Morsetto di terra
(Procedura)
[1] Verificare attentamente che le connessioni siano corrette.
[2] Chiudere ELB ed alimentare l’inverter
(Il LED rosso “POWER” sull’operatore digitale deve essere acceso)
[3] Impostare la destinazione del riferimento di frequenza
Selezionare A001 e premere una volta il tasto
Impostare 02 utilizzando i tasti
1
2
. (compaiono due campi numerici )
FUNC
, premere una volta il tasto
si è così destinato il comando di
STR
frequenza da ingresso analogico esterno (la visualizzazione tornerà su A001)
[4] Impostare la destinazione del comando di marcia
Selezionare A002 e premere una volta il tasto
Impostare 02 utilizzando i tasti
1
2
. (compaiono due campi numerici )
FUNC
, premere una volta il tasto
di marcia dall’esterno (la visualizzazione tornerà su A002)
3-5
STR
si è così destinato il comando
Capitolo 3 Operazioni
[5] Impostazioni della frequenza di uscita
Selezionare il codice F001 e premere una volta il tasto
FUNC
(Indicazione a quattro campi numerici.)
Impostare la frequenza desiderata utilizzando il tasto
oppure
1
2
e premere il tasto
STR
per memorizzare.
(l’indicazione ritornerà a F001.)
[6] Impostazione del senso di marcia (direzione)
Selezionare il codice F004 e premere una volta il tasto
FUNC
(potranno essere indicati 00 oppure 01.)
Impostare 00 nel caso si desideri la marcia oraria (forward), o 01 nel caso di marcia antioraria (revers)
Utilizzando i tasti
oppure
2
e premere il tasto
1
per confermare
STR
(l’indicazione ritornerà a F004.)
[7] Impostazione delle visualizzazioni di controllo.
Per visualizzare la frequenza di uscita impostare il codice in d001, e premere una volta il tasto
FUNC
Per visualizzare la frequenza di uscita impostare il codice in d003, e premere una volta il tasto
FUNC
(i codici di indicanti lo stato sono
[8] Premere il tasto
RUN
( Il LED verde di
avanti,
indietro o
stop.)
per avviare l’inverter.
“RUN”
si accende e le visualizzazioni cambiano in dipendenza del parametro
visualizzato.
[9] Premere il tasto di
STOP/
RESET
per decelerare e arrestare
(Quando la frequenza verrà portata a 0 Hz il LED verde di “RUN” si spegnerà )
ATTENZIONE
Assicurarsi che il senso di rotazione sia quello desiderato. Rischio per persone o cose.
Assicurarsi che non vi siano vibrazioni anomale. Rischio per persone o cose.
Accertarsi che durante le rampe di accelerazione / decelerazione non intervengano protezioni dell’inverter e
controllare che la velocità di rotazione del motore corrisponda a quella impostata.
Quando si ha l’intervento della protezione di sovracorrente o di sovratensione durante la prova di marcia
aumentare i tempi di accelerazione e/o decelerazione.
3-6
Capitolo 4 Spiegazione delle funzioni
4.1 Uso dell’operatore digitale (OPE-SR)
Spiegazione sull’utilizzo dell’operatore digitale (OPE-SR)
Gli inverter della serie L300P possono essere programmati e avviati a mezzo dell’operatore digitale che fa parte
della dotazione standard.
1. Descrizione dell’operatore
Segnalazione di
presenza tensione
Visualizzatore a LED a quattro cifre
POWER
ALARM
HITACHI
Inverter in marcia
Segnalazione di inverter in
Hz
V
kW
A
RUN
programmazione
PRG
Segnalazione
di
tasto
%
RUN
abilitato
RUN
Segnalazione di
allarme
Segnalazioni del
parametro al momento
visualizzato
Lampada potenziometro
(tasto di
marcia)
STOP/
RESET
RUN
MIN
MAX
Potenziometro per
impostazione frequenza
FUNC (tasto funzione)
STR Tasto per la
FUNC
1
2
STR
memorizzazione
Tasto
“aumenta”
Nome
Visualizzatore
Lampada inverter in
marcia (RNU)
Lampada inverter in
programmazione (PRG)
Lampada POWER
Lampada ALARM
Lampade di Monitor
Lampada Potenziometro
abilitato
Lampada tasto di RUN
abilitato
Tasto di RUN
Tasto di Stop/ Reset
Tasto FUNC (funzione)
Tasto STR
(memorizzazione)
Tasti UP/DOWN
Tasto “diminuisci”
Tasto di STOP/RESET
Contenuti
Visualizza la frequenza di uscita la corrente e i parametri
Si accende quando l ’inverter è in marcia
Si accende quando è visualizzato il valore di impostazione di ciascuna funzione
Lampeggia quando il valore impostato non è corretto
E’ accesa quando l’inverter è alimentato
È’ accesa quando l’inverter è in protezione
Si accende per evidenziare quale grandezza è visualizzata
Hz : Frequenza V : Tensione A : Corrente
kW : potenza elettrica % : Rapporto
E’ accesa quando il potenziometro è abilitato e quindi la regolazione della frequenza
di uscita è prevista da operatore digitale
E’ accesa quando il tasto di RUN è abilitato e quindi il comando di marcia è previsto
da operatore digitale
E’ il tasto per comandare l’avviamento dell’inverter. Operativo quando il comando di
marcia è previsto da operatore digitale (vedi sopra).
E’ utilizzato per arrestare l’inverter o ripristinare lo stato normale dopo un allarme
Consente di accedere e commutare i vari modi operativi: monitor, funzioni base ,
funzioni estese
Questo tasto consente di memorizzare i dati dopo un cambiamento. Se non premuto
i nuovi dati verranno persi.
Consentono di aumentare o diminuire i valori da impostare e di navigare tra le
funzioni.
4-1
Capitolo 4 Spiegazione delle funzioni
2. Modo di operare con l’operatore digitale
(1) Metodo per visualizzare i parametri di controllo, le funzioni di base e le funzioni estese.
Alimentare l’inverter
[5]Visualizzazione del parametro di
[1] Visualizzazione delle funzioni di
monitor
Hz
MIN
1
FUNC
spegne
2
Hz
V
kW
A
%
PRG
STOP/
RESET
RUN
ALARM
RUN
V
kW
A
%
PRG
POWER
HITACHI
ALARM
RUN
si
(Visualizzazione d001)
POWER
HITACHI
Quando
monitor N°…….
(visualizzazione iniziale
STOP/
RESET
RUN
MIN
MAX
STR
l’inverter
FUNC
mentre
1
2
MAX
STR
sono
Ritorno allo stato di [2].
visualizzate le funzioni base o estese al ritorno
della tensione ci sarà una visualizzazione
diversa. Infatti lo spegnimento provoca l’uscita
Premere il tasto
Premere il tasto
(Visualizzazione A - - -)
POWER
Hz
V
kW
A
%
PRG
1
FUNC
MIN
2
POWER
HITACHI
ALARM
RUN
STOP/
RESET
(6 volte)
[4] Visualizzazione delle funzioni estese
(visualizzazione di d001)
HITACHI
ALARM
Hz
V
kW
A
%
RUN
PRG
STOP/
RESET
RUN
MAX
FUNC
STR
1
MIN
2
MAX
STR
Premendo ancora il tasto FUNC viene
Modo delle Funzioni estese
visualizzato
Sequenza di visualizzazione
il
contenuto
della
A
funzione (d001 in questo caso).
il tasto
2
tasto
b
C
H
P
Premere il
Premere il
Premere
tasto
1
tasto
ALARM
Hz
V
kW
A
RUN
PRG
%
STOP/
RESET
RUN
FUNC
1
MIN
2
2
(8) volte
[3] Visualizzazione delle funzioni base
(Visualizzazione di d002)
HITACHI
U.
Premere il
1
(8) volte
POWER
2
Premere il tasto
(6 volte)
FUNC
[2] Visualizzazione del modo monitor
RUN
1
(Visualizzazione F001)
*1
POWER
HITACHI
ALARM
Premere il
tasto
1
Hz
RUN
V
kW
A
%
PRG
(19 volte)
STOP/
RESET
RUN
MAX
STR
FUNC
Premere il
2
tasto
(19 volte)
4-2
1
MIN
2
MAX
STR
*1Riferirsi al paragrafo (3) relativo ai
codici delle funzioni
Capitolo 4 Spiegazione delle funzioni
(2) Metodo di impostazione delle funzioni estese
Esempio: cambio della destinazione del comando di marcia (Da Op . digitale
Controllo esterno)
[1] Visualizzazione del gruppo
[5] Visualizzazione del blocco
“A” delle funzioni estese
A delle funzioni estese
POWER
HITACHI
ALARM
Hz
V
kW
A
%
RUN
PRG
POWER
HITACHI
ALARM
Hz
V
kW
A
%
RUN
PRG
STOP/
RESET
RUN
FUNC
MIN
1
MAX
STOP/
RESET
RUN
2
MIN
STR
1
FUNC
Portare il display in condizione “A
-
2
MAX
STR
-
-“ seguendo la procedura indicata nella pagina
Nella
precedente
possibile scorrere tutti i blocchi delle f unzioni
Al momento la destinazione dei comandi è da
estese e le funzioni base
Premere il tasto
condizione
sopra
visualizzata
Premere il tasto
FUNC
è
FUNC
[2] Viene visualizzato il codice
[4] Visualizzazione del codice della
della prima funzione del gruppo A
funzione
(Visualizzazione di A002)
POWER
HITACHI
ALARM
Hz
V
kW
A
%
RUN
PRG
POWER
HITACHI
ALARM
Hz
V
kW
A
%
RUN
PRG
STOP/
RESET
RUN
MIN
MAX
STOP/
RESET
RUN
FUNC
1
2
MIN
STR
1
FUNC
Premere il tasto
2
MAX
STR
1
Per
(Visualizzazione di A002)
confermare
la
variazione
del
dato
è
necessario premere il tasto STR. Dopo aver
POWER
HITACHI
premuto la lampada di abilitazione del tasto di
ALARM
Hz
RUN
RUN si spegnerà e il comando di marcia sarà
V
kW
A
%
PRG
STOP/
RESET
RUN
FUNC
1
MIN
2
atteso dall’esterno.
MAX
Premere il tasto
STR
Premere il tasto
FUNC
STR
POWER
HITACHI
ALARM
Hz
[3] Visualizzazione del contenuto di
A002
Hz
V
kW
A
%
PRG
STOP/
RESET
RUN
Viene visualizzato 02 che
FUNC
1
MIN
2
MAX
STR
significa:
STOP/
RESET
1
V
kW
A
%
RUN
PRG
ALARM
RUN
FUNC
2
POWER
HITACHI
RUN
Premere il tasto
MIN
2
MAX
STR
destinazione del comando di
marcia da operatore digitale.
Accedendo al contenuto, la
4-3
Modifica del contenuto da 02 a 01
Capitolo 4 Spiegazione delle funzioni
(3) Selezione dei codici delle funzioni
I codici del modo monitor, delle funzioni base e delle funzioni estese possono essere selezionati facilmente
seguendo la seguente procedura. L’esempio illustra come si passa dal codice N° d001 del modo monitor al
codice A029 delle funzioni estese.
[1]
Visualizzazione
del
codice
6] Finish setting function
di
code No.
( Visualizzazione di A029)
monitor.
POWER
HITACHI
HITACHI
RUN
PRG
Hz
ALARM
RUN
Hz
V kW
A
%
PRG
V
A
%
STOP/
RESET
RUN
STOP/
RESET
RUN
FUNC
1
MAX
MIN
2
POWER
Premere il tasto
ALARM
POWER
FUNC
1
MIN
2
kW
PRG
(Conferma
MAX
STR
FUNC
1
2insieme
[2] passaggio alle funzioni estese
1
(2 volte) (9 volte)
[5] Cambiamento della prima
HITACHI
RUN
PRG
ALARM
Hz
V kW
A
%
PRG
MAX
MIN
2
STR
STOP/
RESET
RUN
FUNC
”d” lampeggia
Premere il tasto
(2 volte)
1
MIN
2
1
La prima cifra “1” lampeggia.
Premere il tasto
ALARM
POWER
Hz
V kW
A
%
RUN
PRG
1
HITACHI
ALARM
Hz
V kW
A
%
RUN
PRG
MIN
2
STR
(Visualizzazione A021)
POWER
FUNC
MAX
STR
(Visualizzazione di A001)
HITACHI
MAX
STOP/
RESET
RUN
STR
FUNC
”A” lampeggia
Premendo il tasto STR si sposta la cifra
MIN
1
2
MAX
STR
La seconda cifra “2” lampeggia.
lampeggiante .
Premere il tasto
Premere il tasto
STR
[3] Cambiamento della
[4] Cambiamento della
terza cifra del codice.
seconda cifra del codice
POWER
PRG
STOP/
RESET
RUN
FUNC
1
MIN
2
POWER
HITACHI
ALARM
Hz
V kW
A
%
RUN
Premere il tasto
STR
PRG
STOP/
RESET
RUN
(Confermato “0
ALARM
Hz
V kW
A
%
RUN
MAX
STR
1
(2 volte)
(Si conferma la scelta di “A”)
HITACHI
FUNC
1
MIN
2
MAX
STR
Non cambiare la terza cifra
La seconda cifra “0”
lampeggiante ma confermare lo
lampeggia.
“0” premendo STR.
4-4
inesistente
la
lettera
“A”
ricomincerebbe a lampeggiare.
codice corretto.
POWER
HITACHI
RUN
STOP/
RESET
MAX
STR
Ripetere l’operazione con il
cifra del codice
ALARM
Hz
V kW
A
%
RUN
MIN
2
Se venisse inserito un codice
or
POWER
1
1
Fine della selezione di A029
lampeggia.
Premere il tasto 2
FUNC
STOP/
RESET
RUN
STR
Premere i tasti
STOP/
RESET
ALARM
Hz
V kW
A
%
RUN
La prima cifra “9”
RUN
HITACHI
STR
Capitolo 4 Spiegazione delle funzioni
4.2 Lista dei codici
Modo Monitor
Codice
Nome della funzione
d001
Monitor Frequenza
di uscita
Monitor Corrente di
uscita
Monitor Senso di
marcia
Monitor Retroazione
PID
d002
d003
d004
d005
Campo di impostazione o visualizzazione
(Operatore digitale)
Valori
inizial
i
Impost
abile in
marcia
Cambio
Parametri
in marcia
(Nota1)
Pagi
na
0.00-99.99/100.0-400.0(Hz)
-
-
-
4-11
0.0-999.9(A)
-
-
-
4-11
F(marcia avanti)/o(stop)/r(marcia indietro)
-
-
-
4-11
0.00-99.99/100.0-999.9/1000. -9999. /
1000-9999/{100-{999 (10000-99900)
-
-
-
4-11
-
-
-
4-12
-
-
-
4-12
0.00-99.99/100.0-999.9/1000. –9999. /
1000-3996
-
-
-
4-13
di
0.0-600.0 V
-
-
-
4-13
di
0.0-999.9 kW
-
-
-
4-13
di
0.-9999./1000-9999/{100-{999 ore
-
-
-
4-14
di
0.-9999./1000-9999/{100-{999 ore
-
-
-
4-14
0.-9999./1000-6553(10000-65530) (volte)
-
-
-
4-14
Codice di allarme, frequ.(Hz), corrente(A),
tensione(V),tempo di marcia(ore), tempo
di alimentazione (ore)
-
-
-
4-14
4-14
4-14
4-14
4-14
4-14
Codici di avvertimento
-
-
-
4-82
0.00
ü
ü
4-15
(Esempio) FW, morsetti 7,2, 1: ON
Morsetti 8,6,5,4,3 :OFF
ON
FW
Diagnostica ingressi
programmabili
OFF
8
d006
7
6
5
4
3
2
1
(Esempio) Morsetti12,11:ON
AL, 15,14,13 : O F F
ON
Diagnostica uscite
programmabili
OFF
AL 15 14 13 12 11
d007
d013
d014
d016
d017
d080
d081
d082
d083
d084
d085
d086
d090
F001
Fattore di
conversione
frequenza
Monitor tensione
uscita
Monitor potenza
ingresso
Conteggio ore
lavoro
Conteggio ore
alimentazione
Allarmi intervenuti
(quante volte)
Monitor allarme 1
Monitor allarme 2
Monitor allarme 3
Monitor allarme 4
Monitor allarme 5
Monitor allarme 6
Monitor
avvertimenti menti
Frequenza di uscita
0.0,frequ. di start- Massima frequenza
(frequenza massima N°2)(Hz)
0.01-99.99/100.0-999.9/1000.-3600.(s)
0.01-99.99/100.0-999.9/1000. -3600. (s)
0.01-99.99/100.0-999.9/1000. -3600. (s)
0.01-99.99/100.0-999.9/1000. -3600. (s)
T. accelerazione 1
30.00
ü
ü
T. accelerazione 2
30.00
ü
ü
T. decelerazione 1
30.00
ü
ü
T. decelerazione 2
30.00
ü
ü
Selezione
del
senso
F004
00(avanti) / 01(indietro)
00
di marcia
(Nota1) il cambio dei parametri durante la marcia è vi ncolato alla programmazione di b031 (blocco software)
(Nota2) Premere il tasto STR per mantenere una determinata visualizzazione all’accensione dell’inverter.
F002
F202
F003
F203
4-5
4-17
4-17
4-17
4-17
4-15
Capitolo 4 Spiegazione delle funzioni
Modo funzione
Impostazioni
basilari
Codice
Nome della funzione
Iimpostazione ingressi
Analogici
Cambio
Dati iniziali
Impostaz
-FE/-FU/-FR
In marcia
parametri
in marcia
Pagina
A001
Destinazione del rif. di frq.
00(VR)/01(esterno)/02(oper.digit.)/03(RS485)/04(opzione1)/05(opz.2)
01/01/00
-
-
4-15
A002
Destinazione del c.do di marcia
01(esterno)/02(oper.digitale)/03(RS485)/04(opzione1)/05(opzione2)
01/01/02
-
-
4-16
A003
Frequenza base
30. – Massima Frequenza (Hz)
50./ 60/ 60.
-
-
4-18
A203
“
30. – 2a Massima Frequenza (Hz)
50./ 60/ 60.
-
-
4-18
30. - 400. (Hz)
50./ 60/ 60.
-
-
4-19
30. - 400. (Hz)
50./ 60/ 60.
-
-
4-19
00 (Commutazione di O ed OI con l’ingresso AT )/
01(Commutazione di O ed O2 con l’ingresso AT )
-
4-20
A004
A005
A006
per secondo motore
Frequenza massima
A204
Multi-velocità -Frequenza della marcia ad impulsi
Campo di impostazione
“
per secondo motore
Funzione ingresso AT
Funzione ingresso ana. O2
00
-
00(singolo)/01(Ingresso di somma con O, OI) [non invertente] /
02(velocità ausiliaria di O, OI [invertente]
00
-
-
4-20
A011
Frequenza di start ingresso O
0.00-99.99/100.0-400.0 (Hz)
0.00
-
ü
4-21
A012
Frequenza di end ingersso O
0.00-99.99/100.0-400.0 (Hz)
0.00
-
ü
4-21
A013
% riferimento di start ingresso O
0.-100.0 (%)
0.
-
ü
4-21
A014
% riferimento di end ingresso O
0.-100.0(%)
100.
-
ü
4-21
A015
selezione frequenza di start ing. O
00 (frequenza di start dall’esterno)/01(0Hz)
01
-
ü
4-21
A016
Campionamento per O, OI, O2
1.-30.(volte)
8.
-
ü
4-22
A019
Selezione delle multi-velocità
00 (binario:fino a 16 multi-velocità con 4 ingressi)/
01 (un bit = un terminale) : fino a 8 multi-velocità con 7 ingressi)
00
-
4-44
A020
Multi-velocità 0
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A220
Multi-velocità 0 per 2° motore
0.00, dalla frequenza di start alla 2a massima frequenza (Hz)
0.00
ü
ü
4-44
A320
Multi-velocità 0 per 3° motore
0.00, dalla frequenza di start alla 3a massima frequenza (Hz)
0.00
ü
ü
4-44
A021
Multi-velocita1
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A022
Multi-velocita2
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A023
Multi-velocita3
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A024
Multi-velocita4
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A025
Multi-velocita5
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A026
Multi-velocita6
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A027
Multi-velocita7
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A028
Multi-velocitad8
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A029
Multi-velocitad9
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A030
Multi-velocitad10
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A031
Multi-velocitad11
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A032
Multi-velocitad12
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A033
Multi-velocitad13
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A034
Multi-velocitad14
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A035
Multi-velocitad15
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
ü
ü
4-44
A038
Freq. Marcia ad impulsi
0.00, dalla frequenza di start a 9.99(Hz)
1.00
ü
ü
4-46
-
00(arresto Jog inerziale/non attivo in marcia) / 01(arresto jog con
A039
rampa/non attivo in marcia) / 02(arresto Jog con iniezione c.c./non attivo
in marcia) / 03(arresto Jog inerziale/valido anche in marcia – Jog
Selezione delle funzionalità della
marcia ad impulsi (Jog)
00
-
ü
4-46
00 (Boost di coppia manuale) / 01 (Boost di coppia automatico)
00
-
-
4-25
00 (Boost di coppia manuale) / 01 Boost di coppia automatico)
00
-
-
4-25
0.0-20.0(%)
1.0
ü
ü
4-25
0.0-20.0(%)
1.0
ü
ü
4-25
0.0-50.0(%)
5.0
ü
ü
4-25
0.0-50.0(%)
5.0
ü
ü
4-25
-
4-23
disponibile dopo la decelerazione e l’arresto) / 04 (arresto Jog con
rampa/valido in marcia) / 05 (iniezione c.c/valido in marcia)
A041
Selez.modalità Boost di coppia
A241
Frenatura in corrente continua
Caratteristiche V/F
A042
A242
A043
A243
A044
“
2° motore
Boost di coppia manuale
“
Punto
2° motore
lavoro
coppia
di
manuale
“
2° motore
Primo sistema di controllo
A244
Secondo sistema di controllo
A045
Guadagno tensione di uscita
A051
bo ost
00/(VC) / 01(VP elevato a 1,7) / 02(curva V/f programmabile) /
00/(VC) / 01(VP elevato a 1,7) / 02 (curva V/f programmabile) /
00 /01 /00
-
00 /01 /00
-
4-23
ü
4-22
-
ü
4-26
0.50
-
ü
4-26
0.0 - 5.0(s)
0.0
-
ü
4-26
Intensità dell’iniezione c.c.
0. - 100. (%)
0.
-
ü
4-26
A055
Tempo di iniezione c.c.
0.0 - 60.0(s)
0.0
-
ü
4-26
A056
Selez. Fronte/livello per iniezione
00(agisce sul fronte)/01(agisce sul livello)
01
-
ü
4-26
A057
Intensità iniezione c.c. allo start
0. - 100. (%)
0.
-
ü
4-26
A058
Tempo iniezione c.c. allo start
0.00-60.0(s)
0.0
-
ü
4-26
A059
Freq. di modulazione iniez. c.c.
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
3.0
-
-
4-26
20. - 100.
100.
Selezione iniezione c.c.
00(disabilitata)/01(abilitata)
00
A052
Frequenza iniezione c.c.
0.00-60.00(Hz)
A053
Tempo di attesa all’iniezione c.c.
A054
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
4- 6
ü
Capitolo 4 Spiegazione delle funzioni
Modo Funzione
Controllo PID
Limiti superiore ed inferiore e salti di
frequenza
Codice
Nome della funzione
Campo di impostazione
°
o
Dati iniziali
Impostaz
-FE/-FU/-FR
In marcia
Cambio
parametri
in marcia
Pagina
A061
1 limite superiore di frequenza
0.00, oppure dal 1 limite inferiore di freq. alla Frequenza massima (Hz)
0.00
-
ü
4-29
A261
2o limite superiore di frequenza
0.00, oppure dal 2° limite inferiore di freq. alla Frequenza massima (Hz)
0.00
-
ü
4-29
o
A062
1 limite inferiore di frequenza
0.00, dalla frequenza di start al 1° limite superiore di frequenza (Hz)
0.00
-
ü
4-29
A262
2o limite inferiore di frequenza
0.00, dalla frequenza di start al 2° limite superiore di frequenza (Hz)
0.00
-
ü
4-29
A063
Salto di frequenza1
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-30
A064
Ampiezza salto di frequenza 1
0.00-10.00(Hz)
0.50
-
ü
4-30
A065
Salto di frequenza2
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-30
A066
Ampiezza salto di frequenza 2
0.00-10.00(Hz)
0.50
-
ü
4-30
A067
Salto di frequenza3
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-30
A068
Ampiezza salto di frequenza 3
0.00-10.00(Hz)
0.50
-
ü
4-30
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-30
0.00-60.0(s)
0.0
-
00(Disabilitato)/01(abilitato)
00
-
ü
4-31
0.2-5.0
1.0
ü
ü
4-31
A069
Frequenza
di
stop
prima
dell’acc.
ü
A070
Durata della frequenza di stop
A071
Abilitazione del PID
4-30
A072
Guadagno proporzionale PID-P
A073
Guadagno integrale PID-I
0.0-3600.(s)
1.0
ü
ü
4-31
A074
Guadagno differenziale PID-D
0.00-100.0(s)
0.00
ü
ü
4-31
A075
Fattore di scala del PID
0.01-99.99(%)
1.00
-
ü
4-31
A076
Selezione ingresso retroazione
00(retroazione : OI)/01(retroazione: O)
00
-
ü
4-31
A081
Selezione della funzione AVR
00 (ON sempre) / 01 (OFF sempre) / 02 (OFF solo in decelerazione)
00/ 00/ 02
-
-
4-18
-
-
4-18
AVR
(230/400)/
A082
Selezione della tensione motore
A085
Modalità di lavoro dell’inverter
A086
A092
Risposta del risparmio
energetico.Taratura precisione
Tempo di accelerazione2
A292
Modi operativi e funzioni di taratura
A093
200/215/220/230/240, 380/400/415/440/460/480
( 2o m o t o re )
“
Tempo di decelerazione2
( 2o m o t o re )
(230/460)
(200/400)
00(normale)/01(risparmio energetico)/02(Fuzzy)
00
-
-
4-32
0.0-100.0(s)
50.0
ü
ü
4-32
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
ü
ü
4-33
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
ü
ü
4-33
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
ü
ü
4-33
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
ü
ü
4-33
A293
“
A094
Modalità di utilizzo 2a rampa
00(cambia coningresso 2CH )/01(cambia ad una frequenza impostata)
00
-
-
4-33
A294
Modalità di utilizzo 2a rampa
(per il 2° motore)
00(cambia coningresso 2CH )/01(cambia ad una frequenza impostata)
00
-
-
4-33
A095
Frequenza di cambio con 2°
rampa di accelerazione
0.00-99.99/100.0-400.0(Hz)
0.00
-
-
4-33
0.00-99.99/100.0-400.0(Hz)
0.00
-
-
4-33
0.00-99.99/100.0-400.0(Hz)
0.00
-
-
4-33
0.00-99.99/100.0-400.0(Hz)
0.00
-
-
4-33
A295
2° Frequenza di cambio con 2°
rampa di accelerazione (2o
motore)
A096
Frequenza di cambio con 2°
rampa di decelerazione
2° Frequenza di cambio con 2°
A296
rampa di decelerazione (2o
Taratura dei limiti di frequenza esterni
motore)
A097
Scelta profilo rampa di accel.
00(lineare)/01(Curva ad “ S ”)/02(Curva ad “ U ” ) / 0 3 (Curva ad “U” rovesciata )
00
-
-
4-34
A098
Scelta profilo rampa di decel.
00(lineare)/01(Curva ad “ S ”)/02(Curva ad “ U ” ) / 0 3 (Curva ad “U” rovesciata )
00
-
-
4-34
A101
Frequenza di start ingresso OI
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-21
A102
Frequenza di end ingresso OI
0.00-99.99/100.0-400.0(Hz)
-
ü
4-21
A103
OI start rate
0.-100. (%)
20.
-
ü
4-21
A104
% riferimento di end in gresso OI
0.-100. (%)
100.
-
ü
4-21
A105
% riferimento di start
OI
00(Frequenza esterna di start)/01(0Hz)
01
-
ü
4-21
A111
Frequenza di start ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
-
ü
4-21
A112
Frequenza di end ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
-
ü
4-21
-100. - 100. (%)
-100.
-
ü
4-21
A113
Accel,
Dece
A114
%riferimento di start
ingresso
ingresso
O2
% riferimento di end
ingresso
0.00 / 60.00/
0.00
ü
-100. - 100. (%)
100.
-
A131
Curvatura della curva di accel.
01(piccola curvatura)-10(grande bombatura)
02
-
ü
4-34
A132
Curvatura della curva di decel.
01(piccola curvatura)-10(grande bombatura)
02
-
ü
4-34
b001
Selezione ripartenza automatica
00
-
ü
4-35
0.3-1.0(s)
1.0
-
ü
4-35
0.3-100.(s)
1.0
-
ü
4-35
00(disabilitata)/01(abilitata)
02(disabilitata durante l’arresto e la decelerazione dopo un comando di
00
-
ü
4-35
00(16 volte)/01(libero)
00
-
ü
4-35
00(disabilitata)/01(abilitata)
00
-
ü
4-37
0.00-99.99/100.0-400.0(Hz)
0.00
-
O2
00(Allarme)/01(Start da 0Hz )/02(start dalla frequenza a cui è il motore)/
03(start alla frequenza a cui è il motore-seguente decelerazione ed
4-21
allarme)
Ripartenza su mancanza istant. rete
b002
Tempo massimo consentito di
bassa tensione
b003
Tempo di attesa alla ripartenza
b004
Mancanza istantanea di rete/
Allarme
bassa tensione allo
stop
arresto)
Mancanza istantanea rete/
b005
Selezione ripartenza x bassa
tensione
b006
b007
Selezione protezione di
mancanza fase
Impostazione
aggancio
frequenza
di
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
4- 7
ü
4-35
Capitolo 4 Spiegazione delle funzioni
Modo funzione
Protezione termica del motore
Codice
Livello della protezione
termica
Da 20% al 120% della corrente nominale(A)
b212
Livello
della
protezione
termica (2o motore)
Da 20% al 120% della corrente nominale(A)
a
b013
b213
b015
b016
b017
b019
Limitazione di sovraccarico
Selezione 1 caratteristica
termica elettronica
Selezione 2a caratteristica
termica elettronica
Frequenza 1 della
caratteristica termica libera
Corrente 1 della
caratteristica termica libera
Frequenza 2 della
caratteristica termica libera
Corrente 2 della
caratteristica termica libera
Frequenza 3 della
caratteristica termica libera
Corrente 3 della
caratteristica termica libera
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
Impostaz
In marcia
Cambio
parametri in
marcia
Pagine
-
ü
4-37
-
ü
4-37
01/ 00/ 00
-
ü
4-37
01/ 00/ 00
-
ü
4-37
Dati iniziali
-FE/-FU/-FR
Corrente
nominale
inverter
Corrente
nominale
inverter
0.-400.(Hz)
0.
-
ü
4-38
0.0-1000.(A)
0.0
-
ü
4-38
0.-400.(Hz)
0.
-
ü
4-38
0.0-1000. (A)
0.0
-
ü
4-38
0.-400.(Hz)
0.
-
ü
4-38
0.0-1000.(A)
0.0
-
ü
4-38
b021
Selezione delle modalità di
sovraccarico
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante) / 03(abilitato in accelerazione / velocità
costante (aumento di velocità nel modo rigenerativo))/
01
-
ü
4-39
b022
Regolazione del livello del
limite di sovraccarico
Dal 50 % al 150% della corrente nominale inverter (A)
-
ü
4-39
-
ü
4-39
b020
b023
b024
Impostazione del percorso V/f
libero
Campo di impostazione
b012
b018
Impostazioni degli ingressi programmabili
Nome della funzione
Costante di tempo della
limitazione di corrente
Selezione delle modalità di
sovraccarico 2
b025
Regolazione del livello del
limite di sovraccarico 2
b026
Costante di tempo della
limitazione di corrente 2
b031
Selezione delle modalità del
blocco software alla
programmazione
b100
b101
b102
b103
b104
b105
b106
b107
b108
b109
b110
b111
b112
b113
V/f libero frequenza1
V/f libero tensione1
V/f libero frequenza2
V/f libero tensione2
V/f libero frequenza3
V/f libero tensione3
V/f libero frequenza4
V/f libero tensione4
V/f libero frequenza5
V/f libero tensione5
V/f libero frequenza6
V/f libero tensione6
V/f libero frequenza7
V/f libero tensione7
C001
Ingresso programmabile1
C002
Ingresso programmabile2
C003
Ingresso programmabile3
C004
Ingresso programmabile4
C005
Ingresso programmabile5
0.10-30.00(s)
I nominale
x1.20 /
x1.10 /
x1.20
1.00/
15.00/ 1.00
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante)
01
-
ü
4-39
Dal 50 % al 150% della corrente nominale inverter (A)
I nominale
inverter
x 1.20
-
ü
4-39
0.10-30.00(s)
1.00
-
ü
4-39
01
-
ü
4-48
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
-
-
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
4-24
18
-
ü
4-43
16
-
ü
4-43
03/13/03
-
ü
4-43
02
-
ü
4-43
01
-
ü
4-43
00 (impossibile cambiare alcun dato, eccetto questo, quando il terminale SFT è
ON) / 01(impossibile cambiare alcun dato, eccetto la frequenza impostata,
quando il terminale SFT è ON) / 02 (Impossibile cambiare alcun dato eccetto
questo) / 03 (Impossibile cambiare alcun dato eccetto l’impostazione di
frequenza ) / 10( possibile cambiare alcuni dati durante la marcia)
Da 0 al valore V/f della frequenza 2 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 3 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 4 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 5 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 6 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 7 (Hz)
0.-800.0(V)
0.-400.(Hz)
0.-800.0(V)
01 (RV:indietro abilitato) / 02 (CF1:Multivelocità1) / 03 (CF2: Multivelocità2) /
04 (CF3: Multivelocità3) / 05 (CF4: Multivelocità4) / 06 (JG:Jogging)/
07 (DB:Frenatura esterna in c.c ) / 08 (SET: 2o settaggio dei parametri /
09 (2CH:c.do seconda rampa) / 11 (FRS: arresto inerziale) / 12 (EXT:Allarme
esterno)/
13 (USP:Prevenzione alle ripartenze non volute) / 14 (CS:commutazione del
motore su rete) /15 (SFT:blocco software) / 16 (AT: Selezione ingresso
analogico in tens. / corr.) /
18( R S : ripristino allarmi) / 20 (STA:marcia a 3 flili) / 21 (STP:a tre fili ) / 22 (F/R:
avanti indietro a 3 fili) / 23 (PID:abilitazione/disabilitazione PID) / 24
(PIDC:reset dell’errore integrale del PID) / 27(UP:aumenta da remoto) / 28
(DWN:diminuisci da remoto) /
29 (UDC:cancellazione set frequenza UP/DOWN con controllo remoto) /
31(OPE: forzatura comandi su operatore digitale) / 3 2 ( S F 1 : M u l t i -velocità bit1)
/
33 (SF2: Multi-velocità bit2) / 34 (SF3: Multi-velocità bit3) / 35 (SF4:
Multi-velocità bit4) /
36 (SF5: Multi-velocità bit5) / 37 (SF6: Multi-velocità bit6) / 38 (SF7:
Multi-velocità bit7)/
39 (OLR:cambio del limite di sovraccarico) / no( nessuna funzione)
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
4- 8
Capitolo 4 Spiegazione delle funzioni
Modo funzione
Codici
Impostazione degli
ingressi programmabili
C011
C012
C013
C014
C015
Offset e tarature degli
ingressi/uscite analogiche
Parametri della
comunicazione
Impostazioni uscite ?
Impostazione delle soglie
Impostazione delle uscite programmabili
C019
Impostaz
In marcia
Cambio
parametri
in marcia
Pagina
-FE/-FU/-FR
00
-
ü
4-44
00(NA)/01(NC)
00
-
ü
4-44
00(NA)/01(NC)
00/ 01/ 00
-
ü
4-44
00(NA)/01(NC)
00
-
ü
4-44
00(NA)/01(NC)
00
-
ü
4-44
00(NA)/01(NC)
00
-
ü
4-44
00 (RUN:Inv. In m a r c i a ) / 0 1 (FA1:Uscita di arrivo in frequenza modalità FA 1 ) /
02( FA2: Uscita di arrivo in frequenza modalità FA2) /
03 (OL:preallarme sovraccarico) /
04 (OD:errore eccessivo controllo PID) / 05(AL:Uscita di allarme) /
06 (FA3: set point di frequenza raggiunto) / 08(IP:Arresto temporaneo per
mancanza rete ) / 0 9 ( U V : bassa tensione di alimentazione) / 11(RNT : t e m p o d i
inverter RUN scaduto / 12(ONT:tempo di inverter ON scaduto) /
13 (THM: preallarme protezione termica)
01
-
ü
4-54
00
-
ü
4-54
05
-
ü
4-54
00
-
ü
4-59
00
-
ü
4-60
00
-
ü
4-60
Nome della funzione
Ingresso1 selezione a/b
(NA/NC)
Ingresso2 selezione a/b
(NA/NC)
Ingresso3 selezione a/b
(NA/NC)
Ingresso4 selezione a/b
(NA/NC)
Ingresso5 selezione a/b
(NA/NC)
Ingresso FW selezione a/b
(NA/NC)
Campo di impostazione
NA= Normalmente Aperto
00(NA)/01(NC)
Dati iniziali
C021
Impostazione dell’uscita 11
C022
Impostazione dell’uscita 12
C026
Relè di allarme inverter
C027
Selezione uscita FM
C028
Selezione
AM
uscita
analogica
C029
Selezione
AMI
uscita
analogica
C031
Selez. Uscita 11 a/b (NA/NC)
00(NA)/01(NC)
00
-
ü
4-55
C032
Selez. Uscita 12 a/b (NA/NC)
00(NA)/01(NC)
00
-
ü
4-55
C036
Sel. Relè allarme a/b (NA/NC)
00(NA)/01(NC)
01
-
ü
4-55
C040
Selezione Uscita di
avvertimento di sovraccarico
00(ON durante accel.,decel.e velocità costante)/01(Solo a velocità costante)
01
-
ü
4-40
C041
Impostazione del livello di
avvertimento di sovraccarico
Da 0.0 al 200% della corrente nominale(A)
Corrente
nominale
inv.
-
ü
4-40
C042
Impostazione del segnale di
arrivo in frequenza in accel.
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-56
C043
Impostazione del segnale di
arrivo in frequenza in decel.
0.00-99.99/100.0-400.0(Hz)
0.00
-
ü
4-56
C044
Livello di scostamento PID
0.0-100.0(%)
3.0
-
ü
4-31
C061
Impostazione livello
avvertimento termico
C070
Provenienza dei comandi
C071
00 (Frequenza di uscita) / 01 (Corrente di uscita) / 03 (uscita di frequenza
digitale) / 04(Tensione di uscita) / 05 (Potenza di ingresso) / 06 (% di carico
termico) / 07(frequenza in limitazione LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 05(Potenza in ingresso) / 06(% di carico termico) /
07(frequenza in limitazione LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 05(Potenza in ingresso) / 06(% di carico termico) /
07(frequenza in limitazione LAD)
0.0-100.0(%)
80.0%
-
ü
4-38
02(operatore digitale) / 03(RS485) / 04(opzione1) / 05(opzione2)
02
-
-
4-65
Velocità di comunicazione
02(test della comunicazione seriale “loop-back test”)
03(2400bps)/04(4800bps)/05(9600bps)/06(19200bps)
04
-
ü
4-65
C072
Codice di comunicazione
1. -32.
1.
-
ü
4-65
C073
Bit/Carattere
7(7bit)/8(8bit)
7
-
ü
4-65
C074
Parità
00(no parità)/01(parità/02(disparità)
00
-
ü
4-65
C075
Bit di stop
1(bit)/2(bit)
1
-
ü
4-65
C078
Tempo attesa comunicazione
0.-1000.(ms)
0.
-
ü
4-65
C081
Taratura ingresso “O”
0.-9999./1000-6553(10000-65530)
C082
Taratura ingresso “OI”
0.-9999./1000-6553(10000-65530)
C083
Taratura ingresso “O2”
0.-9999./1000-6553(10000-65530)
C085
Taratura ingresso termistore
C086
Taratura offset uscita AM
C087
Taratura uscita AMI
C088
Taratura offset uscita AMI
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
ü
ü
-
ü
ü
-
ü
ü
-
0.0 - 1000.
105.0
ü
ü
4-60
0.0 - 10.0(V)
0.0
ü
ü
4-60
0. - 255.
50
ü
ü
4-60
0. - 20.0(mA)
Tarato in
fabbrica
ü
ü
4-60
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
4- 9
Capitolo 4 Spiegazione delle funzioni
Modo Funzione
Codici
Impostaz
In marcia
0.-9999./1000-6553(10000-65530) ore
0.
-
b035
Disabilitazione senso marcia
00(avanti e indietro abilitati)/01(solo marcia avanti)/02(solo indietro)
00
b036
Tensione ridotta all’avviamento
00(tempo di tensione ridotta breve)-06(tempo di tensione ridotta lungo)
06
b037
Selezione visualizzazione
00(tutto) / 01(ogni funzione) / 02 (Impostazioni utente / Impostazioni
principali)
00
b080
Taratura uscita AM
0. - 255.
180
b081
Taratura uscita FM
0. - 255.
60
b082
Frequenza di start (di minima)
0.10-9.99(Hz)
0.50
b083
Frequenza di modulazione
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
b084
Inizializzazione
b085
b091
Codice della Nazione
Fattore di conversione della
frequenza per funzione d007
Tasto di STOP abilitato
Modalità di riavvio dopo FRS
Rapporto di utilizzo frenatura
dinamica BRD
Selezione modalità di stop
b092
Controllo ventilatori inverter
b095
Selezione della funzione BRD
b096
b098
b099
C091
Livello di intervento della BRD
Selezione termistore
Livello di errore del termistore
Selezione del modo Debug
Modalità di funzionamento del
comando aumenta/diminuisci
b090
Altre funzioni
Dati iniziali
b034
b087
b088
C101
ü
4-60
ü
ü
4-59
-
ü
4-41
3.0
-
ü
4-19
4-61
ü
4-13
00(abilitato)/01(disabilitato)
00(riavvio da 0Hz) / 01(aggancio a frequenza motore)
00
00
-
ü
ü
4-16
4-49
ü
0.0-100.0(%)
0.0
-
ü
4-42
00(si arresta con decelerazione)/01(Si arresta per inerzia)
00(sempre attivi)/01(attivi in marcia dopo aver alimentato, si arresta dopo
5 minuti dall’arresto del motore.)
00(disabilitata)/01(abilitata<disabilitata durante lo stop>)/02(abilitata
durante lo stop >)
330-380 / 660-760(V)
00(disabilitato)/01(PTC abilitato)/02 (NTC abilitato)
0. – 9999. (ohm)
00(No attivo)/01(attivo)
00
-
-
4-16
00
-
-
4-42
00
-
ü
4-42
360/720
00
3000.
00
-
ü
ü
ü
ü
4-42
4-60
4-60
-
01(non mantiene) / 00(mantiene l’ultimo valore di frequenza)
00
-
ü
4-52
ü
4-51
ü
4-51
ü
ü
-
ü
ü
-
ü
ü
-
-
-
4-63
-
-
4-63
-
ü
ü
4-63
4-63
4-63
4-63
0.-9999./1000-6553(10000-65530)
C123
Taratura di “zero” ingresso O2
0.-9999./1000-6553(10000-65530)
00
ü
2/4/6/8(poli)
2/4/6/8(poli)
0. - 255.
0. - 255.
00
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
4
4
100.
100.
00(Allarme)/01(Marcia)
00
-
ü
4-63
00(Allarme) / 01(Marcia)
00
-
ü
4-63
00(Modo 0)/01(Modo 1)/02(Modo 2)
00
-
-
-
00 (operatore digitale) / 01 (opzione1) / 02 (opzione 2)
00
-
ü
-
H003
Potenza nominale 1 motore
0.20-75.0(kW) <0.2-160kW>
H203
Potenza nominale 2o motore
0.20-75.0(kW) <0.2-160kW>
H004
H204
H006
H206
Numero poli 1o motore
Numero poli 2o motore
K stabilizzazione1o motore
K stabilizzazione2o motore
Comportamento opzione 1 su
errore
Comportamento opzione 2 su
errore
Selezione modalità opzione
ingressi digitali (Acc/Dec)
Impostazione posizione di Stop
con scheda opzionale SJ-DG
(in modalità orientamento).
Impostazione tempo di Timeout
con comunicazione DeviceNet
Comportamento dell’inverter in
caso di errore di comunicazione.
Output Instance Number definisce il formato delle uscite.
Input Instance Number definisce il formato degli
ingressi
Comportamento dell’inverter in
caso di “Idle mode”.
Numero poli motore - per
comando velocità motore.
P049
4-62
ü
1.0
Taratura di “zero” ingresso OI
P048
ü
0.1-99.9
C122
P047
4-41
-
4-61
0.-9999./1000-6553(10000-65530)
P046
4-15
ü
-
Taratura di “zero” ingresso O
P045
-
-
-
C121
P044
-
01/ 02/ 00
Aggancio al volo dopo reset
P032
4-58
-
C103
P031
ü
-
00(sul fronte di salita) / 01(sul fronte di discesa)/
02(sul fronte di salita, attivo solo in caso di blocco)
00(riavvio da 0Hz) / 01(Riavvio con aggancio al volo)
P002
Pagina
00
Modalità comando di di reset
o
Cambio
parametri
in marcia
00(Cancellazione memoria allarmi)/01(Inizializzazione dati)/
02(Cancellazione memoria allarmi + Inizializzazione dati)
00(Interno)/01(Europeo)/02(Ameri cano)
C102
P001
Opzioni
-FE/-FU/-FR
Campo di impostazione
Tempo di inverter in marcia /
Tempo di inverter alimentato
b086
Tabella utente
Nome della funzione
-
ü
ü
0.00-99.99s
1.00
-
-
-
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
-
-
-
20, 21, 100
21
-
-
-
70, 71, 101
71
-
-
-
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
-
-
-
0-38 (possibile impostare solo numeri pari)
0
-
-
-
U001
Selezione Utente 1
no/d001-P002
no
-
ü
4-62
U002
Selezione Utente 2
no/d001-P002
no
-
ü
4-62
U003
Selezione Utente 3
no/d001-P002
no
-
ü
4-62
U004
Selezione Utente 4
no/d001-P002
no
-
ü
4-62
U005
Selezione Utente 5
no/d001-P002
no
-
ü
4-62
U006
Selezione Utente 6
no/d001-P002
no
-
ü
4-62
U007
Selezione Utente 7
no/d001-P002
no
-
ü
4-62
U008
Selezione Utente 8
no/d001-P002
no
-
ü
4-62
U009
Selezione Utente 9
no/d001-P002
no
-
ü
4-62
U010
Selezione Utente 10
no/d001-P002
no
-
ü
4-62
U011
Selezione Utente 11
no/d001-P002
no
-
ü
4-62
U012
Selezione Utente 12
no/d001-P002
no
-
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
4- 10
ü
4-62
Capitolo 4 Spiegazione delle funzioni
4.3 Spiegazione delle funzioni
4.3.1 Modo Monitor
Monitor della frequenza di uscita
Il codice d001 consente di visualizzare la frequenza di uscita dell’inverter.
Il dato viene visualizzato come segue.
Corrispondenza
Quando è visualizzato d001 si accenderà la lampada “Hz” .
d001: Frequenza di uscita
(Visualizzazione)
0.00 - 99.99 : La visualizzazione avviene in centesimi di Hz (0.01Hz)
100.0 - 400.0 : La visualizzazione avviene in decimi di Hz (0,1Hz)
Monitor della corrente di uscita
Il codice d002 consente di visualizzare la corrente di uscita dell’inverter.
Il dato viene visualizzato come segue.
Corrispondenza
Quando è visualizzato d002 si accenderà la lampada “A”
d002: corrente di uscita
(Visualizzazione)
0.0 - 999.9 : visualizzazione in decimi di amper (0,1A)
Monitor della direzione di marcia
Il codice d003 consente di visualizzare l’attuale senso di rotazione del motore
Rotazione Avanti/Indietro/stato di stop.
Se il comando di marcia è dato con il tasto di RUN dell’operatore digitale, il LED
Sopra il tasto di RUN sarà acceso
Corrispondenza
(Visualizzazione)
d003: direzione di
F : Marcia avanti
funzionamento
o : Stop
r : Marcia indietro
Monitor del segnale di retroazione del controllo PID
Quando viene selezionata la funzione PID A071=01, l’inverter visualizza la retroazione in d004
Il valore visualizzato può essere trasformato in unità ingegneristiche per mezzo del fattore di scala (A075)
“Visualizzazione in d004”=”segnale di retroazione” x “fattore di scala A075”
Corrispondenza
d004: Visualizzazione retroazione PID
(fattore di scala per conversione della frequenza)
(Impostazioni)
(A075)
A071:Selezione PID
A075: Fattore di scala PID
A071 : 0.1(Il PID è abilitato)
A075 : 0.01-99.99 - impostabile 0.01
(Visualizzazione)
0.00 - 99.99
:la visualizzazione è in unità di 0.01.
100.0 - 999.9
:la visualizzazione è in unità di 0.1.
1000 -
9999
: la visualizzazione è in unità.
100 -
999
: la visualizzazione è in unità di100.
4-11
Capitolo 4 Spiegazione delle funzioni
Corrispondenza
Monitor degli ingressi programmabili
Il Visualizzatore a LED fornisce informazioni sullo stato degli ingressi.
d005: stato ingressi programmabili
(Esempio)
Visualizzatore
FW, e gli ingressi 7,2,1: sono attivi (ON)
Gli ingressi 8,6,5, 4, 3: sono disattivi OFF
(Nero): Acceso
FW
ON
(Bianco): Spento
OFF
Iingressi
programmabili
8
7
6
5
4
3
2
1
Corrispondenza
Monitor delle uscite programmabili
Il Visualizzatore a LED fornisce informazioni sullo stato delle uscite
d006:
(Esempio)
programmabili
Uscite programmabili
stato
12, 11: ON
Uscita di allarmeAL, uscite programmabili 15, 14, 13: OFF
Visualizzatore
ON
(Nero): Acceso
OFF
(Bianco): Spento
Uscite
programmabili
AL
15 14
13
(OFF) OFF OFF OFF
12
ON
11
ON
4-12
delle
uscite
Capitolo 4 Spiegazione delle funzioni
Fattore di conversione della frequenza
In d007 viene visualizzata la frequenza di uscita moltiplicata per una costante impostabile in b086.
“d007” = “ frequenza di uscita(d001)” x “ fattore di conversione(b086)”
Corrispondenza
(Visualizzazione) visualizzazione di d007
0.00 - 99.99:
Visualizzazione in unità di 0,01
d007: Visualizzazione del valore
100.0 - 999.9:
Visualizzazione in unità di 0,1
di frequenza convertito
100. - 9999.:
Visualizzazione in unità di 1
b086: fattore di conversione della
1000 - 3996 :
Visualizzazione in unità di 10
frequenza
(Campo di impostazione) Il campo di impostazione di b086
è da 0.1 - 99.9 : valore minimo impostabile 0.1
(Esempio) frequenza di uscita (d001):50.00Hz
fattore di conversione (b086) è 1.1,
(d007) visualizza “55.00” perchè “50 x 1.1 = 55.00”.
(Nota) Se il terminale di uscita FM viene impostato come uscita digitale di frequenza, la frequenza generata
dal terminale tiene conto del fattore di conversione della frequenza e diventa come d007.
Monitor della tensione di uscita
Corrispondenza
In d013 viene visualizzato il valore efficace della tensione di uscita
d013: tensione di uscita
Il Led di monitor “V” si illumina quando viene visualizzato il contenuto di d013
(Visualizzazione)
0.0 – 600.0
:la visualizzazione avviene in unità minme di 0.1V
Monitor della potenza elettrica in ingresso
In d014 viene visualizzato il valore della potenza elettrica assorbita dall’inverter.
Corrispondenza
d014: potenza elettrica di
ingresso
I Led di monitor “V” ed “A” si illuminano contemporaneamente per indicare “KW”
quando viene visualizzato il contenuto di d014
(Visualizzazione)
0.0 – 999.9
:L’unità di misura della visualizzazione è di 0.1 kW
4-13
Capitolo 4 Spiegazione delle funzioni
Monitor contaore di inverter in marcia
Corrispondenza
Il tempo di lavoro dell’inverter viene accumulato e visualizzato in d016
d016:
(Visualizzazione)
0.0
ore
di
lavoro
dell’inverter
- 9999.
: Visualizzato con unità di un’ora
1000 - 9999
: Visualizzato con unità di 10 ore
100 -
: Visualizzato con unità di 1000 ore
999
Monitor contaore di inverter alimentato
Corrispondenza
In d017 viene visualizzato il tempo totale in cui l’inverter
è stato alimentato
d017: monitor del tempo di
(Visualizzazione)
Power ON
0. 0 - 9999.
: Visualizzato con unità di un’ora
1000 - 9999
: Visualizzato con unità di 10 ore
{100 - {999
: Visualizzato con unità di 1000 ore
Monitor del numero totale degli allarmi
Corrispondenza
In d080 viene visualizzato il numero totale degli allarmi
d080: contatore allarmi
(Visualizzazione)
0. - 9999.
: Visualizzato in unità di 1
1000 - 6553
: Visualizzato in unità di 10
Monitor degli allarmi 1-6
Corrispondenza
Viene visualizzato il dettaglio degli ultimi sei errori
d081: Trip monitor 1
L’ultimo errore è visualizzato in d081
(Contenuti visualizzati)
d082: Trip monitor 2
[1] Codice di allarme (Visualizzati i codici di errore da E0 a E79.)(Nota1)
d083: Trip monitor 3
[2] Frequenza di uscita durante l’intervento dell’allarme(Hz)
d084: Trip monitor 4
[3] Corrente di uscita durante l’intervento dell’allarme (A)
d085: Trip monitor 5
[4] La tensione continua (tra i terminali P ed N) durante l’allarme(V)
d086: Trip monitor 6
[5] Il tempo totale di alimentazione dell’inverter prima dell’allarme(Ore)
[6] Il tempo totale di lavoro dell’inverter prima dell’allarme (Ore)
(Nota 1) per ulteriori informazioni sui codici di errore si consiglia di consultare il capitolo 4.4 del presente
manuale
Procedura per la consultazione della memoria degli allarmi.
FUNC
(1) Codice
di errore
(Nota 2)
(2) frequenza
di errore
(3) Corrente
di errore
(5) Tempo di
lavoro
prima
dell’errore
(4)
tensione
continua (P-N)
FUNC
(Nota2) Nel caso nessun allarme fosse intervenuto sarà visualizzato
4-14
(6) Tempo di
inverter acceso
prima
dell’errore
Capitolo4 Spiegazione delle funzioni
4.3.2 Modo funzione
Impostazione della frequenza di uscita
Corrispondenza
F001
La frequenza può essere impostata in F001, quando la destinazione
A001
del comando di frequenza è da operatore digitale cioè A001=02
:Frequenza di uscita
:Selez. destinazione c.do di
frequ.
Per gli altri possibili modi di impostazione della frequenza
A020/A220/A320: 1a/2/3a multivelocità
consultare questo manuale alla funzione A001
C001-C008: Ingressi programmabili
Quando si imposta un valore di frequenza in F001, lo stesso valore
è automaticamente impostato anche nella prima multi -velocità (A20).
La stessa operazione con l’ingresso (08) SET attivo, provoca la memorizzazione di F001 nella funzione in A220
(secondo set di parametri) analogamente con l’ingresso (17)SET3 attivo F001 viene memorizzato in A320
ovviamente le funzioni SET e SET3 dovranno essere assegnate a due ingressi.
Parametro
Impostazione
di frequenza
Multi-velocità
Velocità n° 0
Codice
F001
A020/A220/
A320
Campo di impostazione
Da 0.0Hz alla 1st/2 nd/3 rd massima
frequenza.
Contenuti
Unità: Hz
“F001” = “A020”
Secondo settaggio “F001” = “A220”
Terzo settaggio
“F001” = “A320”
Senso di marcia
Corrispondenza
Questa funzione è attiva solo quando la destinazione del comando di marcia è
F004: Selezione del senso di
da operatore digitale (tasto RUN)
marcia
Codice
Dati
00
F004
01
Contenuti
Marcia
avanti
(FW)
“ indietro (RV)
Corrispondenza
b035: Permette di abilitare
Abilitazione/Disabilitazione del senso di marcia
una
sola
direzione
di
Il senso di rotazione può essere limitato ad una sola direzione in tutte
le applicazioni dove l’inversione del senso di marcia può essere pericoloso
Codice
b035
Dati
00
01
02
Contenuti
Avanti/Indietro attivi
Solo marcia avanti
Solo marcia indietro
Corrispondenza
A001:destinazione
Destinazione del comando di frequenza
del
comando di frequenza
Permette di selezionare dove sarà impostata la frequenza
Quando la frequenza è impostata a 0-10Vdc, tramite dei terminali O2 -L il segno +/- del segnale analogico
determinerà il senso di rotazione del motore.
In questo caso la vi sualizzazione d001 non fornirà l’indicazione del senso di marcia. Eventualmente, controllate
la corretta direzione di rotazione con d003.
Codice
funzione
A001
Dati
Contenuti
00
01
02
03
04
05
impostazione della frequenza con il potenziometro a bordo tastiera.
Impostazione della frequenza da ingresso analogico (Morsetti: O-L, OI-L, O2-L)
Impostazione della frequenza da operatore digitale (F001) o da operatore remoto
Impostazione della frequenza a mezzo seriale RS485
Impostazione della frequenza da opzione 1.
Impostazione della frequenza da opzione 2.
4-15
Capitolo4 Spiegazione delle funzioni
Corrispondenza
Destinazione del comando di marcia
Seleziona il modo in cui si fa partire e si arresta l’inverter.
A002 :Destinazione del comando di marcia
Comando di marcia e arresto da terminali di ingresso Start/Stop a mezzo
C001-C008: Ingressi programmabili
di contatto “pulito” collegato alla morsettiera di controllo.
C019 :Selezione ingresso FW come NA/NC
Marcia avanti : terminali FW-CM1 chiusi
F004
Marcia indietro : terminali RV-CM1 chiusi
(solo per comandi da operatore digitale)
:Selezione della direzione di marcia
L’ingresso 01(RV) deve essere assegnato ad un ingresso programmabile.
Come tutti gli ingressi anche FW e RV possono essere programmati con contatto NC o NA.
Per il terminale FW, utizzate la funzione C019.
Nel caso sia utilizzato il tasto di RUN sull’operatore digitale la direzione potrà essere cambiata in F004, l’arresto
sarà effettuato con il tasto di STOP.
Quando i comandi di marcia vengono chiusi contemporaneamente (FW ed RV entrambi chiusi) si ottiene un
comando di STOP
Comando
Codice
funzione
Selezione del
comando di
marcia
A002
Selezione della
logica di
comando NC/NA
Contenuti
Dati
C019
C011-C018
01
02
03
04
05
00
Start/Stop da ingressi FW ed RV
Start/Stop da operatore digitale, locale o remoto.
Start/Stop da interfaccia seriale RS485
Start/Stop da opzione1
Start/Stop da opzione2
Contatto normalmente aperto NA
01
Contatto normalmente chiuso NC
Modalità di arresto (STOP)
Corrispondenza
Esistono diverse possibilità per arrestare l’inverter: la
b091
tabella seguente le riassume indicando le funzioni interessate.
F003/F203/F303:1o/2o/3o tempo di decelerazione
Se il comando di marcia viene dato con l’inverter in FRS -
b003
Free Run Stop, l’inverter riavvia il motore secondo la selezione
fatta in b088 (riferiirsi alla funzione Free Run Stop).
Codice
funzione
b091
Comando
Modalità di arresto
Modalità del riavvio dopo arresto
inerziale
Impostazione della frequenza di
aggancio
Tempo Attesa alla ripartenza
b088
b007
b003
:Modalità di STOP
:attesa prima della ripartenza
b007
:Impostazione della frequenza di aggancio
b088
:Modalità alla ripartenza dopo un arresto inerziale
Dati
Contenuti
00
01
Arresto con rampa di decelerazione
Arresto inerziale (il motore si ferma con
movimento inerziale)
Ripartenza da 0Hz
Aggancio al volo del motore
00
01
0.00-400. Unità: Hz
0
0.3-100. Unità : secondi
Abilitazione del tasto di stop
Il tasto di stop sull’operatore digitale può essere disabilitato, tranne quando il comando di marcia è previsto da
pannello digitale. La funzione di Reset rimane invece comunque attiva.
Corrispondenza
Codice
funzione
b087
Dati
00
01
Contenuti
b087: Abilita / Disabilita del
Tasto di STOP attivo.
Tasto di STOP disattivo
4-16
tasto di STOP
Capitolo4 Spiegazione delle funzioni
Taratura dei tempi di accelerazione e decelerazione
Impostare tempi lunghi per accelerare e decelerare dolcemente ,
Corrispondenza
tempi corti per accelerare o decelerare rapidamente.
Il tempo impostato è il tempo che l’inverter impiega per accelerare
F002 / F202: 1o / 2o Tempo di accelerazione
o decelerare nel campo fra 0Hz e la massima frequenza (A004).
F003 / F203: 1o / 2o Tempo di decelerazione
La commutazione tra la 1°/2° accelerazione e 1°/2° decelerazione
A004 / A204: 1° / 2° Frequenza massima
può essere controllata assegnando ai terminali di ingresso la
funzione 08 (SET)
Programmando un terminale di ingresso com e LAC (cancellazione della funzione LAD) ed attivando il terminale,
le rampe di accelerazione e decelerazione programmate vengono ignorate e l’inverter segue istantaneamente le
variazioni del riferimento di frequenza.
Comando
Codice
Campo di
funzione
impostazione
F002/F202
0.01-3600.
F003/F203
0.01-3600.
Contenuti
Unità: secondi
Tempo di
accelerazione
Tempo di
decelerazione
Impostare il tempo di accelerazione da 0Hz alla massima
frequenza
Unità : secondi
Impostare il tempo di decelerazione dalla massima
frequenza a 0Hz
Frequenza di
Uscita (Hz)
Frequenza
Frequenza impostata
massima
A004/A204
Tempo di dec.
Tempo di acc.
dal set-point
al set-point
Tempo di accel.
F002/F202
T(s)
Tempo di decel.
F003/F203
I tempi di rampa di accelerazione e di decelerazione devono essere impostati in accordo con il valore dell’inerzia
complessiva del sistema meccanico azionato. Tempi troppo brevi possono causare l’intervento delle protezioni
di sovracorrente (OC trip) o di sovratensione (OV trip).
Tempo di accelerazione ts
ts =
(JL + JM) x N M
JM: J del motore (kgm 2 )
9.55 x (TS - TL)
NM: velocità di rotazione del motore (rpm)
Tempo di decelerazione t B
tB=
JL: J inerzia del carico convertita all’albero motore (kgm 2 )
(JL + JM) x N M
TS: massima coppia accelerante sviluppabile dal motore (Nm)
TB: massima coppia decelerante sviluppabile dal motore (Nm)
9.55 x (TS + TL)
4-17
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Frequenza base (frequenza nominale motore)
Frequenza nominale e tensione motore
A003/A203: 1 /2a frequenza base
Funzione AVR (regolatore automatico di tensione)
A081: Selezione AVR
a
A082: selezione tensione nominale del motore
(1) Frequenza nominale e tensione motore
La selezione della frequenza base e della tensione del motore deve essere fatta sulla base dei dati nominali
riportati sulla targhetta del motore.
Tensione di uscita
(V)
Tensione
Nominale
motore
Frequenza base
Frequenza di uscita (Hz)
La frequenza base è la frequenza nominale del motore, può essere identificata controllando la targhetta del
motore.
E’ molto importante impostare un valore corretto di frequenza base (A003) valori errati possono danneggiare
il motore. Se il motore ha una frequenza nominale superiore a 60 Hz è da considerarsi un motore speciale in
questo caso consigliamo di verificare che la corrente nominale del motore (corrente a pieno carico), non superi
la corrente nominale dell’inverter.
Molto importante è anche la tensione nominale del motore (A082) valori errati possono danneggiare il motore.
La frequenza base ha due possibilità di taratura (la seconda è A203): in tal caso l’utilizzo è legato all’uso dell’
ingresso 08(SET) per il richiamo del secondo set di parametri.
Comandi
Codici
funzione
Campo di im postazione
Contenuti
Frequenza
base
A003/A203
Da 30.0 Hz alla
1°/2° frequenza massima
Unità:Hz
Selezione
della tensione
del motore
200/215/220/230/240
A082
380/400/415/440/460/480
Unità:1V
Per inverter di classe 200 V
Unità:1V
Per inverter di classe 400 V
(2) Funzione AVR (regolatore automatico di tensione)
Con questa funzione, anche a fronte di una variazione della tensione di ingresso la tensione di uscita rimane
invariata. La tensione di uscita viene mantenuta costante sulla base del valore di tensione impostato in A082.
La funzione A081 consente di abilitare o disabilitare il regolatore automatico di tensione (AVR).
Codice
funzione
Dati
Contenuti
00
Sempre attiva
01
Sempre disattiva
02
Disattiva solo in
decelerazione
A081
Descrizione
La funzione è attiva in accelerazione, velocità costante,
decelerazione
La funzione non è attiva in accelerazione, velocità costante,
decelerazione
Per aumentare la capacità di frenatura del motore
(si aumentano le perdite nel motore durante la fase diarresto
riducendo in tal modo l’energia rigenerata verso l’inverter).
4-18
Capitolo4 Spiegazione delle funzioni
Frequenza massima
Corrispondenze
Impostare la frequenza massima dell’inverter
La frequenza massima rappresenta il massimo valore di frequenza che
A004/A204: 1a /2a Frequenza massima
l’inverter genera in uscita a fronte del massimo segnale di riferimento di
frequenza (da ingresso analogico, operatore digitale o altra provenienza).
Per commutare la massima frequenza fra il primo e il secondo set di parametri programmare la funzione 08(SET)
e attivare l’ingresso corrispondente.
Dalla frequenza base alla frequenza massima la tensione di uscita inverter rimane costante (uguale al valore
impostato in A082 se la funzione AVR è attiva).
Codice funzione
A004/A204
Limit of
setting
30.-400.
Tensione di
uscita (V)
Contents
Tensione
nominale del
motore
Unit : Hz
Frequenza di modulazione
La frequenza di modulazione dell’inverter è programmabile in b083
Se la frequenza di modulazione viene impostata a valori alti, il rumore
Frequenza base
prodotto dal motore si ridurrà ma aumenteranno i radio disturbi e
Massima
la corrente dispersa verso terra. Questa funzione agevola l’individuazione
di eventuali frequenze di risonanza meccanica nel sistema azionato
Codice funzione
b083
Campo di impostazione
0.5 -12.0 (Nota 1)
Corrispondenze
b083: frequenza di
Contenuti
modulazione
Unità: kHz - taglie 1.5 - 75kW
0.5 - 8.0 (Nota 1)
Unità: kHz - taglie 90 - 132kW
(Nota1) Il massimo valore della frequenza di modulazione che eviti il declassamento dell’inverter è differente in
base alla potenza dell’inverter. Aumentando il valore della frequenza di modulazione la corrente nominale
dell’inverter dovrà diminuire come sotto indicato.
Classe di Tensione
Potenza nominale
inverter
1.5kW
2.2kW
3.7- 4 kW
5.5kW
7.5kW
11kW
15kW
18.5kW
22kW
30kW
37kW
45kW
55kW
75kW
90kW
110kW
132kW
Classe 200V (trifase)
Frequenza di .
Massimo carico a
modulazione
frequenza di modulazione
massima
massima
12
12
12
12
12
12
12
10[12]
4[6]
3[4]
8
10
6
3
-
100%
100%
100%
100%
100%
100%
100%
100% [90%]
90% [80%]
70%
80%
95%
75%
70%
-
Classe 400V
Frequenza di . modulazione
massima
Massimo carico a frequenza
di modulazione massima
12
12
12
12
12
12
12
12
12
8
10
10
10
5
6
6
6
100%
100%
100%
100%
100%
100%
100%
100%
100%
90%
80%
95%
95%
60%
95%
85%
85%
: si raccomanda di rispettare quanto indicato nelle tabella sopra riportata.
Il mancato rispetto può causare danneggiamenti all’inverter
I dati in tabella si riferiscono ad una temperatura ambiente di 40°C - Usando l’inverter a
temperatura superiore (max. 50°C), consultare l’Ufficio Tecnico Drivetec per stabilire il derating
aggiuntivo richiesto.
ATTENZIONE
4-19
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Ingressi analogici (0, 02, 01)
A005: AT ingresso selezione
L’inverter è dotato di tre ingressi analogici.
O-L : 0 - 10V
Tensione/corrente
OI-L : 4 - 20mA
A006: selezione modalità ingresso 02
O2-L : -10 /+ 10V
C001-C005: Ingressi programmabili
Le funzioni relative a questi ingressi sono di seguito riportate
Comandi
Codici funzioni
Dati
Contenuti
L’ingresso
AT
Morsetto
AT ON : OI-L abilitato
00
Selezione
commuta
fra
O/OI
Morsetto
AT OFF : O-L abilitato
A005
modalità
L’ingresso AT
Morsetto AT ON : O2-L abilitato
ingresso AT
01
commuta fra O/O2 Morsetto AT OFF : O-L abilitato
00
Indipendente
Selezione
01
Si somma con il riferimento di O o OI(Non inverte la
modalità
A006
rotazione)
ingresso O2
02
Si somma con il riferimento di O o OI (Inverte la rotazione)
Assegnare l’ingresso 16(AT) ad uno dei terminali programmabili
Quando l’ingresso 16(AT) non è utilizzato l’impostazione di frequenza sarà il risultato delle tre componenti da
O,OI,O2.
Quando A006 è “00”, il riferimento di frequenza diviene il valore di O2.
Quando A006 è “01” oppure “02”, il riferimento di frequenza diviene il valore a cui OI e O2 vengono sommati.
I seguenti metodi di impostazione di frequenza sono disponibili mediante la combinazione delle funzioni A005 ed
A006 con l’ingresso AT.
Nel caso che i comandi di marcia indietro (RV) e marcia avanti (FW) siano entrambi ON, l’inverter invertirà il
senso di marcia solo quando (Il riferimento principale (O/OI) + il riferimento ausiliario (O2) )<0
A006
A005
Sato di
AT
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
00
00
01
Con ingresso
AT utilizzato
01
00
(Esempio1)
01
02
00
(Esempio2)
01
Con ingresso
AT
non
utilizzato
00
01
02
-
-
Riferimento principale
Riferimento ausiliario
(02-L)
O-L
OI-L
O-L
O2-L
O-L
OI-L
O-L
O2-L
O-L
OI-L
O-L
O2-L
O2-L
Si sommano O-L e OI-L
Si sommano O-L e OI-L
No
No
No
No
Si
Si
Si
No
Si
Si
Si
No
No
Si
Si
Inversione del
senso di
marcia
No
Si
No
Si
Si
No
Si
(Esempio2)
(Esempio1)
fOI
fO
Riferimento
di frequenza
ausiliario
fOI
fO
Riferimento
principale
Riferimento
principale
Ingresso O / OI
FW
AT
Inverte
FW
AT
Non inverte
Ingresso O / OI
0
0
fO2
fO2
Riferimento
di frequenza
ausiliario
0
Ingresso O2
0
Ingresso O2
fO + fO2
fO + fO2
fOI +fO2
Marcia avanti
Segnale di
riferimento
risultante
0
4-20
Segnale di
riferimento
risultante
Inverte senso di
fOI +fO2
Marcia avanti
0
Marcia
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Allineamento fra frequenza di uscita e
riferimento esterno (Fstart/Fend)
Valido solo per i segnali analogici di riferimento
A011: O start
A103: OI %rif.per lo start
(comandi di frequenza)
A012: O end
A104: OI %rif.per l’ end
Terminale O-L : 0 - 10V
A013: O %rif.per lo start
A105: OI start selection
Terminale OI-L : 4 - 20mA
A014: O %rif.per l’ end
A111: O2 start
TerminaleO2-L : -10/ + 10V
A015: O Modalità di start
A112: O2 end
Utilizatene uno a scelta come riferimento di frequenza.
A101 : OI start
A113: O2 %rif.per lo start
(1) frequenze di Start e di End degli ingressi O-L ed OI-L
A102 : OI end
A114: O2 %rif.per l’ end
Impostazioni ingressi
analogici
O/OI start
Codice
funzione
A011/A101
Campo di
impostazione
0.00-400.0
Contenuti
Unità : Hz Impostazione della frequenza di start (a riferimento=0)
Unità:Hz Impostazione della frequenza di end (a riferimento
O/OI end
A012/A102
0.00-400.0
max.)
Unità: % Si imposta la percentuale del riferimento 0-10V,
O/OI % rif. per lo start A013/A103
0.-100.
4-20mA alla quale si vuole la frequenza di start
Unità: % Si imposta la percentuale del riferimento 0-10V,
O/OI % rif. per l’end
A014/A104
0.-100.
4-20mA alla quale si vuole la frequenza di end
Per riferimenti da 0 a A013 /A103 la frequenza di uscita è uguale
00
O/OI Modalità nella
alla frequenza di start. (A011/A101 ) – Esempio 1
A015/A105
fase di partenza
Per riferimenti da 0 a A013 /A103 la frequenza di uscita è uguale
start Selection
01
a 0Hz. – Esempio 2
Se si utilizza un riferimento analogico 0 -5V con i terminali O-L, impostare A14 =50%
(Esempio 1) A015/A105 : 00
(Esempio 2) A015/A105 : 01
Frequenza
Massima (Hz)
A012/A102
Frequenza
massima (Hz)
A012/A102
A011/A101
0
A011/A101
A013/A103
A014/A104
(0V/4mA)
100%
(10V/20mA)
Riferimento di
frequenza (%)
0
A013/A103
A014/A104
(0V/4mA)
100%
(10V/20mA)
Riferimento
di
frequenza (%)
(2) Frequenze di Start, End per l’ingresso O2-L
Set item
Function code
Data
Contents
Unità:
Hz
Impostazione
della
frequenza di start
O2 start
A111
400.-400.
(a riferimento-10V)
O2 end
A112
400.-400. Unità: Hz Impostazione della frequenza di end
(a riferimento +10V.)
O2 % rif. per
A113
-100 +100. Unità: % Si imposta la percentuale del riferimento
lo start
–10V+10V alla quale si vuole la frequenza di start (note)
O2 % rif. per
A114
-100 +100. Unità: % Si imposta la percentuale d i riferimento –10V+10V
l’end
alla quale si vuole la frequenza di end (note)
(Esempio 3)
(Note) Le percentuali per +/-10V sono le seguenti.
Massima
frequenza (Hz)
da -10V a 0V :da –100 a 0%
Notes
(Esempio 3)
Marcia avanti
da 0V a +10V :da 0 a +100%
per esempio, in caso di utilizzo dell’ingresso O2-L con un
segnale +/-5V, impostare -50% in A113, +50% in A114
-10V
A112
A113
A114 +10V
A111
4-21
Marcia indietro
Massima
frequenza (Hz)
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Impostazione del filtro per gli ingressi analogici
Seleziona il fitro digitale sulla acquisizione del segnale di fiferimento di frequenza
A016: filtro per gli ingressi
(ingresso in tensione o in corrente).
O, OI, O2
Il filtro sugli ingressi analogici serve per ridurre l’eventuale errore dovuto a disturbi
di natura elettromagnetica. Prima di agire sul filtro sarebbe opprtuno tentare di rimuovere il disturbo.
Quando comunque non si riesce ad ottenere una buona stabilità di frequenza causa un disturbo aumentare il
valore di filtro. La risposta dell’inverter al cambio di riferimento di frequenza diventerà quindi più lenta.
Il campo di taratura è di circa 10ms-60 ms (che corrisponde ad un valore impostato da 1 a 30)
Codice
della
funzione
A016
Cam po di
Contenuti
impostazione
1.-30.
È possibile tarare con incrementi di
uno.
Guadagno della tensione di uscita
E’ normalmente impostato al 100% il che significa che alla Frequenza Base la tensione di uscita inverter
corrisponde alla tensione del motore impostata in A082.
Abbassando il guadagno si avrà in uscita una tensione percentualmente proporzionale.
Codice della
Campo di
funzione
impostazion
Contenuti
A045: Guadagno di tensione di uscita.
e
A045
20.-100.
Unità:%
100% = tensione
del motore
A45
Frequenza
base
Corrispondenze
Massima
frequenza
4-22
A082: Tensione del motore
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Sistema di controllo (caratteristica V/f )
A044/A244:1st/2nd sistema di controllo
Consente di impostare la caratteristica V/f
b100/b102/b104/b106/b108/b110/b112
(tensione di uscita/frequenza di uscita)
: V/f libera Frequenza 1/2/3/4/5/6/7
La funzione può avere due parametrizzazioni 1a /2 a
b101/b103/b105/b107/b109/b111/b113
commutabile attivando la funzione 08(SET) assegnata
: V/f libera Tensione 1/2/3/4/5/6/7
a un ingresso programmabile.
Codici delle
funzioni
A044/A244
Dati
Caratteristica V/f
Note
00
01
02
03
Coppia costante (VC)
Coppia ridotta (potenza 1.7VP)
Caratteristica impostabile per punti V/f
Controllo vettoriale in anello aperto
Controllo vettoriale in anello aperto con
dominio di 0Hz
Controllo vettoriale (V2)
solo A044/A244
solo A044/A244
04
05
solo A044/A244
soloA044
(1) Caratteristica a coppia costante (VC)
La tensione di uscita inverter varia in proporzione alla frequenza di uscita, secondo il rapporto
tensione/frequenza nominale del motore, da 0 alla freque nza base, dopo di che rimane costante fino alla
frequenza massima.
Tensione
di
uscita (100%)
Frequenza di uscita (Hz)
0
Frequenza
base
Massima
frequenza
(2) Caratteristica a coppia ridotta (VP alla potenza di 1.7)
Questa caratteristica viene utilizzata per carichi a coppia variabile (con legge quadratica, come pompe
centrifughe e ventilatori) e in quelle applicazioni dove non è richiesta coppia all’avviamento e si vuole
ottenere un miglioramento di rendimento alle basse velocità unito ad un abbassamento del rumore e delle
vibrazioni.
La caratteristica V/f è come segue:
Tensione di uscita
(100%)
1.7
VP-f
VC
0
10% della
frequenza base
a
Tratto
b
Frequenza di uscita
Frequenza
base
Frequenza
massima
c
: Da 0 al 10% della frequenza base, la caratteristica è come a coppia costante
a (Esempio) se la frequenza base è di 50 Hz il tratto a coppia costante è da 0 a 5Hz
Tratto
b :dal 10% della frequenza base sino alla frequenza base, la caratteristica è a coppia ridotta
La caratteristica della tensione in uscita varia in proporzione alla potenza 1.7 della frequenza V=kF 1.7
Tratto
c :La tensione è costante dalla frequenza base sino alla frequenza massima
4-23
Capitolo4 Spiegazione delle funzioni
(3) Caratteristica con impostazione libera (V/f programmabile)
E’ possibile impostare 7 punti della caratteristica V/f, programmando per ogni punto tensione e
frequenza.(b100-b113).
Le
frequenze
relative
ai
punti
programmati
dovranno
rispettare
la
seguente
relazione
1≤ 2 ≤ 3 ≤ 4 ≤ 5 ≤ 6 ≤ 7.
Essendo tutte le frequenze inizialmente impostate a 0Hz necessariamente bisognerà programmare partendo dal
punto 7 (al fine di rispettare la regola sopra riportata).
Quando viene utilizzata la caratteristica V/f programmabile le funzioni di boost (A041/A241), la frequenza base
(A003/A203) e la frequenza massima (A004/A204) non sono attive.
La frequenza impostata al punto 7 viene considerata in questo caso la frequenza massima.
Impostazione
V/f libera
frequenza 7
V/f libera
frequenza 6
V/f libera
Frequenza 5
V/f libera
frequenza 4
V/f libera
frequenza 3
V/f libera
frequenza 2
V/f libera
frequenza 1
V/f libera tensione 7
V/f libera tensione 6
V/f libera tensione 5
V/f libera tensione 4
V/f libera tensione 3
V/f libera tensione 2
V/f libera tensione 1
(Esempio)
Tensione di
Codice funzione
Dati
(campo di impostazione)
b112
0.- 400Hz.
b110
Da 0 Hz alla frequenza 7
b108
Da 0 Hz alla frequenza 6
b106
Da 0 Hz alla frequenza 5
b104
Da 0 Hz alla frequenza 4
b102
Da 0 Hz alla frequenza 3
b100
Da 0 Hz alla frequenza 2
b113
b111
b109
b107
b105
b103
b101
0.0 - 800.0
Contenuti
Unità : Hz
Unità : V
(Nota)
V7
Frequenza
massima
uscita(V)
V6
V5
V4
V1
V2, V3
0
f1
f2
f3
f4
f5
f6
f7
Frequenza di uscita (Hz)
(Nota) Pur potendo impostare 800V la tensione di uscita 1 -7, l’effettiva tensione di uscita non sarà mai superiore
alla tensione di ingresso o comunque non superiore alla tensione impostata in AVR (se la funzione è attiva).
Tensione di uscitaV)
V7
Tensione di ingresso o
tensione AVR
V6
0
4-24
f6
f7
Frequenza di uscita(Hz)
Capitolo4 Spiegazione delle funzioni
Boost di coppia
Corrispondenze
Una corretta installazione del motore unita ad una particolare
o
o
attenzione alla caduta di tensione nei cavi motore, può migliorare
A041/A241
1 /2 selezione del boost di coppia
la prestazione di coppia alle basse velocità.
A042/A242 :1o/2o boost manuale
Con le funzioni A041/A241 si può selezionare l’azione del boost
A043/A243 :1o/2o punto di boost massimo
di coppia: automatico/manuale, il livello del boost di coppia viene
H003/H203: 1a/2a selezione della potenza del motore
stabilito dalle impostazioni (H003/H203 potenza del motore)
H004/H204: 1o/2o selezione del numero di poli
e (H004/H204 numero di poli).
Impostazione
Codice
funzione
Boost di coppia
A041/A241
Boost di coppia manuale
Punto di massimo boost
manuale
Dati
Contenuti
00
Boost di coppia in manuale
01
Boost di coppia in automatico
A042/A242
0.0-20.0
Unità:%
In % della tensione di uscita (100%)
A043/A243
0.0-50.0
Unità:%
In % della frequenza base
(1) Boost di coppia manuale
Il boost viene definito impostando i valori A042/A242 e A043/A243.
A042/A242 definiscono il livello di boost in percentuale della tensione massima di uscita.
Il livello del boost di coppia rappresenta la tensione di uscita a 0 Hz.
Si tenga presente che un li vello eccessivo di boost porta alla saturazione magnetica del motore causando un
eccessivo riscaldamento con possibili danneggiamenti del motore.
Il punto di massimo boost di coppia manuale rappresenta la frequenza alla quale la sovratensione al motore
smette di aumentare e comincia a raccordarsi con la caratteristica V/f impostata.
Per commutare A041,A042,A043 /A241,A242 ,A243 si dovrà attivare un ingresso programmato con la funzione 08
(SET)
Tensione di uscita(%)
100
A042/A242
A043/A243
Frequenza di uscita
Frequenza base
(100%)
(2) Boost di coppia automatico
La tensione di boost è regolata automaticamente in base alle condizioni di carico.
Utilizzando il boost di coppia automatico è necessario che i due i parametri nella tabella qui sotto siano impostati
correttamente. Inoltre, in caso si verifichino interventi delle protezioni di sovracorrente nella fase di
decelerazione, settate la funzione A081per AVR = sempre ON.
Impostazione
Codice funzione
Taglia nominale motore
H003/H203
Numero d i poli del motore
H004/H204
Limiti di impostazione
0.20-75.0(0.4 to 55kW)
0.20-160.0(75 to 150kW)
2/4/6/8
4-25
Contenuti
Unità: kW
Unità: poli del motore
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Frenatura con iniezione di C.C. (funzione DB)
Con questa funzione si applica una tensione continua
agli avvolgimenti del motore così da ottenere un’azione
frenante alle basse velocità.
La frenatura in corrente continua può essere attivata in
due diversi modi : su comando esterno attraverso un
ingresso o ad una frequenza prestabilita.
Dati
A051
00
01
Frequenza di intervento
A052
0.00-60.00
Tempo di ritardo
all’innesco della
frenatura
A053
0.0-5.0
Abilitazione
c.c.
frenatura
Forza di frenatura/Forza
di frenatura allo start
0.
A054/A057
100
A052: DC freq. di frenatura
A057: forza della frenatura alla
A053: DC tempo ritardo
partenza
alla frenatura
A058: tempo di frenatura alla
A054: DC forza di frenatura
partenza
A055: DC tempo di frenatura
A059: frequenza di modulazione
Contenuti
disabilitata
abilitata
Unità : Hz Quando la frenatura è abilitata al
raggiungimento di questa frequenza si ha
l’innesco dell’iniezione di corrente continua
Unità : secondi
Tempo di ritardo prima dell’inizio della frenatura
Unità : %
Debole (Zero corrente)
0.5-12
Forte (sino al 70% della corrente nominale)
Unità : secondi
La frenatura finisce allo scadere di questo
tempo
Il tempo è conteggiato a partire dalla fine del
tempo di ritardo.
Fronte (Esempio 1 -6-a)
Livello (Esempio 1 -6-b)
Unità : secondi
Questo tempo è conteggiato dal comando di
marcia (viene subito inettata corrente continua
ed alla fine del tempo comincia la rampa di
accelerazione).
Unit : kHz (taglie inverter 1.5 - 75kW)
0.5-8
Unit : kHz (taglie inverter 90 - 132kW)
Tempo di frenatura
A055
0.0-60.0
Selezione Fronte /Livello
A056
00
01
Tempo della frenatura
all’avviamento
A058
0.0-60.0
Frequenza
modulazione
frenatura in c.c.
A059
di
della
A056: DC selez. fronte/livello
C001-C005: Ingressi programmabili
Codice
funzione
Impostazione
A051: DC abilitazione
(1) Frequenza di modulazione della frenatura in corrente continua
E’ possibile programmare la frequenza di modulazione della frenatura in corrente continua. Impostare la
frequenza di modulazione in A059.
In funzione della frequenza di modulazione, il valore della forza di frenatura è automaticamente ridotto secondo
la curva sotto riportata . per inverter da 0.4 - 55kW secondo diagramma (i). per taglie 75kW - 150kW secondo
diagramma (ii).
Massima
intensità di
frenatura
(%)
70
60
50
40
30
20
10
0
Massima
intensità di
frenatura
(%)
70
60
50
40
30
20
10
(i) taglie 1,5 - 75kW
(58)
(46)
(34)
(22)
(10)
(50)
(25)
(10)
0
3
5
7 8
Frequenza di modulazione della frenatura in c.c.
3
5
7
9
11
12
Frequenza di modulazione della frenatura in
c.c. (kHz)
(ii) taglie 90-132kW
Limitazione di intensità di frenatura
4-26
Capitolo4 Spiegazione delle funzioni
(2) Comando esterno della frenatura in corrente continua (da terminale di ingresso).
Assegnare la funzione 07(DB) ad un terminale ingresso programambile.
Se abilitata con A051=01, la frenatura con iniezione di corrente continua si attiva chiudendo l’ingresso DB.
Impostare l’intensità della frenatura nella funzione A054.
Se il tempo di ritardo all’innesco della frenatura A053 è impostato, l’uscita dell’inverter si azzera per questo
tempo ed il motore gira per inerzia. Scaduto il tempo di ritardo comincia l ’iniezione di corrente continua.
Attenzione a non eccedere nella taratura del tempo di frenatura A055 o nel tempo di attivazione del terminale
DB poiché si rischia un riscaldamento eccessivo del motore.
Selezionare con A056 la modalità di comando della frenatura, fronte o livello, in accordo con il sistema
azionato.
(a) Comando sul fronte(A056:00)
(Esempio1-a)
(b) comando sul livello (A056:01)
(Esempio1-b)
FW
FW
DB
Frequenza
uscita
DB
di
Frequenza di uscita
A055
(Esempio2-a)
(Esempio2-b)
FW
FW
DB
DB
Frequenza
uscita
Frequenza
uscita
di
di
A055
(Esempio3-a)
(Esempio3-b)
FW
FW
DB
DB
Arresto inerziale
Arresto inerziale
Frequenza di uscita
Frequenza
uscita
A053
A055
di
A053
4-27
Capitolo4 Spiegazione delle funzioni
(3) Comando interno della frenatura in corrente continua (senza comando esterno).
Preventivamente abilitata con A051=01, la frenatura in c.c. può operare anche senza un comando esterno.
La specifica forza di frenatura allo Start si imposta con A057, per una durata programmata con A058.
Diversamente, la forza di frenatura (intensità di corrente c.c. iniettata nel motore) si regola con A054.
La frenatura comincerà a operare a fronte di un comando di stop (FW/RV=OFF), al raggiungimento della
frequenza d i frenatura tarata con A052 e trascorso il tempo di ritardo impostato con A053 (durante il quale
il motore girerà per inerzia).
A questo punto la frenatura opererà con un’intensità impostabile in A054 e per un tempo impostabile in
A055.
Nel caso di comando interno della frenatura in c.c. la selezione delle operazioni Fronte/Livello (A056)
assume un altro significato:
Comando su fronte: viene data priorità alla funzione A055. Pertanto, se durante il tempo di frenatura
l’inverter riceve un comando di ripartenza (FW/RV=ON), l’inverter continuerà l’iniezione di c.c. sino
allo scadere del tempo impostato in A055 e solo allora verrà reso operativo il comando di marcia.
(Esempio5-a), (Esempio6-a)
Comando su livello: viene data priorità al comando di marcia. Pertanto, se durante il tempo di frenatura
l’inverter riceve un comando di ripartenza (FW/RV=ON), il tempo di frenatura impostato in A055 viene
ignorato, l’inverter interrompe l’iniezione di corrente continua e riparte immediatamente. .
(Esempio5-b), (Esempio6-b)
(a) Comando sul fronte(A056:00)
i) Iniezione di c.c. alla partenza (Esempio 4-a)
(b) comando sul livello (A056:01)
i) Iniezione di c.c. alla partenza (Esempio 4-b)
FW
FW
A057
A057
Frequenza di uscita
Frequenza di uscita
A058
ii) iniezione di c.c. all’arresto (Esempio 6 -a)
A058
ii) iniezione di c.c. all’arresto (Esempio 6 -b)
FW
FW
Arresto inerziale
Frequenza di uscita
Arresto inerziale
Frequenza di uscita
A052
A053
A055
A052
iii) iniezione di c.c. all’arresto (Esempio 5 -a)
A053
A055
iii) iniezione di c.c. all’arresto (Esempio 5 -b)
FW
FW
Frequenza di uscita
Frequenza di uscita
A055
A055
A052
A052
4-28
Capitolo4 Spiegazione delle funzioni
Limiti di frequenza
Questa funzione permette di impostare il limite massimo e minimo della frequenza
Corrispondenze
di uscita. La porzione del riferimento di frequenza che eccede i limiti verrà ignorata.
A061/A261:1o/ 2oLimitatore di
Impostare per primo il limite massimo.
Assicurarsi che il limite massimo (A061/A261) > del limite minimo (A062/A262).
frequenza massima
I limiti massimo e minimo sono disabilitati se impostati al valore 0Hz.
A062/A262: 1 o/ 2 o Limitatore di
frequenza minima
Codice
funzione
Campo di impostazione
Limite di frequenza
massima
A061/A261
Da 0,00 Hz o dal limite minimo alla
frequenza massima
Unità : Hz
Impostazione del limite
superiore di frequenza.
Limite di frequenza
minima
A062/A262
Da 0.00, o dalla frequenza minima
al limite di frequenza massima
Unità : Hz
Impostazione del limite
inferiore di frequenza.
Impostazione
Contenuti
(1) caso in cui sono utilizzati O-L, o OI-L
Frequenza di uscita (Hz)
Nota:
con il riferimento di frequenza dai terminali
di ingresso analogico, anche se il
riferimento è zero (Volt) la frequenza di
uscita non scende mai al di sotto del limite
minimo.
Frequenza
massima
A004/A204
A061
A062
10V
20mA
0V
4mA
Comando di frequenza
Massima
frequenza
A004/A204
(2) caso in cui è utilizzato O2-L
A061
Marcia indietro
-10V
A062
Marcia avanti
10V
A062
A061
Massima frequenza
A004/A204
Quando il segnale di riferimento di frequenza è applicato all’ingresso ausiliario O2 ed il segnale è 0 Volt, i limiti
impostati in A062 e A061 verranno applicati ad entrambi i sensi di marcia. Particolarità che riguardano l’uso di
A062:
(a)Quando la destinazione del comando di marcia è da terminale(A002:01)
Terminale
FW(ON)
REV(ON)
Velocità minima di rotazione con ingresso O2 a 0V
A062 per comando di marcia avanti
A062 per comando di marcia indietro
(b) Quando la destinazione del comando di marcia è da operatore digitale (A0 02:02)
F004
00
01
Velocità minima di rotazione con ingresso O2 a 0V
A062 per comando di marcia avanti
A062 per comando di marcia indietro
4-29
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Funzione salti di frequenza
I salti di frequenza sono usati per evitare possibili frequenze di risonanza meccanica
A063:salto di frequenza 1
della macchina azionata. Con questa funzione si impedisce il posizionamento del
A064:ampiezza salto 1
set point a determinate frequenze di risonanza con una ampiezza di salto regolabile.
A065: salto di frequenza 2
A066: ampiezza salto 2
La frequenza di uscita varia comunque seguendo i tempi di rampa programmati.
A067: salto di frequenza 3
Sono impostabili tre salti di frequenza con la relativa ampiezza di salto.
Impostazioni
Codici funzione
Salti di frequenza1/2/3
A063/A065/A067
Limiti di
impostazione
A068: ampiezza salto 3
Contenuti
Unità: Hz
Impostare la frequenza da saltare
0.00-400.0
(corrisponde al centro del salto) - (Nota)
Unità: Hz
Ampiezza del salto
A064/A066/A068
1/2/3
0.00-10.00
Impostare una frequenza corrispondente
a metà salto. (Nota)
(Nota) Per esempio, il riferimento di fre quenza non potrà essere impostato su frequenze tra A063-A064 e
A063+A064.
Frequenza di uscita
A068
A068
A067
A066
A065
A066
A064
A063
A064
Riferimento di frequenza
Corrispondenze
Interruzione della rampa di accelerazione
Questa funzione viene utilizzata per avviare i carichi ad alta inerzia.
A069:frequenza di intervento
Viene infatti interrotta la rampa di accelerazione per un tempo prefissato
arresto rampa
al fine di permettere al motore il recupero dello scorrimento.
A070: tempo di arresto rampa
Da utilizzare quando si hanno problemi di avviamento con allarmi di sovracorrente.
Impostazione
Codice
funzione
Dati
A069
0.00-400.0
A070
0.0-60.0
Frequenza di
arresto rampa
Tempo di
arresto rampa
Contenuto
Unità: Hz
Impostare la frequenza da mantenere.
Unità: secondi
Impostare il tempo di permanenza .
Frequenza di uscita
(Hz)
A069
A070
Comando di frequenza
4-30
Capitolo4 Spiegazione delle funzioni
Funzione PID (Controllo Proporzionale Integrale Derivativo)
Questo controllo integrato nell’inverter serve per mantenere sotto controllo variabili fisiche quali pressioni,
temperature, portate ecc., esigenze tipiche nel controllo di pompe e ventilatori. Per utilizzare questa funzione
impostare A071 =01 o assegnare la funzione 23 (PID abilitato/disabilitato) ad un ingresso programmabile libero.
In tal caso, abilitare la funzione attivando il terminale PID.
Impostazione
Abilitazione del PID
Corrispondenze
Codice
funzione
Dati
Contenuti
A071
00
01
Disabilitato
Abilitato
0.2-5.0
Guadagno Proporzionale
Guadagno
A072
Proporzionale “P”
Guadagno Integrale
A073
“I”
Guadagno Derivativo
A074
“D”
Fattore di scala
A075
Selezione della
A076
retroazione
Errore massimo
C044
(1) Selezione della retroazione
A001 :Selezione del comando di frequenza
A005 :selezione modalità AT
A071 :Abilitazione del PID
A072 :Guadagno Proporzionale “P”
A073 :Guadagno Integrale “I”
A074 :Guadagno Derivativo “D”
Guadagno Integrale
Unità: secondi
Guadagno Derivativo
Unità: secondi
Unità :numero
OI-L:4-20mA
O-L :0-10V
Unità :%
0.0-3600.
0.0-100.0
0.01-99.99
00
01
0.0-100.0
A075 :Fattore di scala
A076 :Selezione del tipo di retroazione
d004 :Monitor della retroazione
C001-C005 : Ingressi programmabili
C021-C022 : Uscite programmabili
C044
:Impostazione del livello di errore
Seleziona l’ingresso analogico a cui collegare la retroazione (A076).
Con la funzione A001 selezionare la destinazione del Set-Point. (deve essere diversa da quella già impegnata
per la retoazione A076). Quando A001=01 (ingresso esterno in tensione O-L) la retroazione dovrà essere
collegata all’ingresso in corrente (OI-L) . La funzione di ingresso AT in A005 sarà disabilitata.
Questa funzione non va usata se O2 è selezionato con A006.
(2) Principio di funzionamento del PID
+
-
Set -Point
0-10V
4-20mA
Errore (e)
Kp(1+
1
TiS
Variabile
+TdS )
trattata f s
Controllo dello
Inverter
M
=
Sensore
fs
Retroazione 0-10V
4-20mA
Trasduttore
Kp guadagno proporzionale, ti: integrale, td: derivativo, s: operatore di Laplace e:Errore
(3) Componenti del PID
[1] Azione “P”
L’azione proporzionale reagisce in modo proporzionale all’errore
Set - Point
Cambia nella funzione
l Gradino
Più grande
controllata
A072
Più piccolo
A072
Variabile
Più grande
Più piccolo
[2] Azione “I” L’azione integrale reagisce all’errore aumentando linearmente con il tempo
Set - Point
Più piccolo
A073
Variabile
Più piccolo
A073
Più grande
Più grande
controllata
[3 ]Azione“D” L’azione derivativa reagisce proporzionalmente alla variazione dell’errore nel tempo.
Set - Point
Più grande
Più grande
A074
Variabile
controllata
A074
Più piccolo
Più piccolo
PI combina le azioni [1] e [2], PD combina le azioni [1] e [3], PID combina le azioni [1], [2] e [3].
4-31
Capitolo4 Spiegazione delle funzioni
(4) Taratura dei guadagni
Si raccomanda di tarare i parametri secono le seguenti indicazioni, nel caso in cui la risposta del regolatore
PID sia instabile.
Ad una variazione del SET-POINT il cambiamento della retroazione è lento ._______________ ÷Aumentare P
La retroazione ha cambiamenti bruschi e non stabili. ________________________________ ÷Abbassre P
Il segnale di retroazione e il SET-POINT non coincidono.______________________________ ÷Abbassare I
La retroazione oscilla e non si stabilizza.__________________________________________ ÷Aumentare I
Nonostante si è aumentato il guadagno P la rsiposta è lenta.__________________________ ÷Aumentare D
Quando si aumenta P, e la retoazione oscilla e non è stabile. __________________________ ÷Abbassare D
(5) Livello di massimo errore/uscita
E’ possibile impostare una soglia C044 di massimo errore del controllo PID, superata la quale può essere
attivata un’uscita opportunamente programmata.
C044 può essere impostata da 0 a 100% del Set-point.
Assegnare il parametro 04 (OD) ad un’uscita programmabile 11-12 (C021-C022).
(6) Monitor della retroazione del PID
La retroazione può essere visualizzata.
Il valore visualizzato può essere moltiplicato per il fattore di scala del regolatore PID – funzione A075.
“Visualizzazione” = “retroazione (%)” x “impostazione di A075”
(7) Reset della memoria dell’errore integrale
Questa funzione consente di cancellare la memoria dove viene accumulato l’errore nel tempo e sul quale
agisce l’azione integrale del regolatore PID.
Assegnare la funzione 24(PIDC) ad uno degli ingressi programmabili.
La memoria viene cancellata quandi questo ingresso diventa attivo (ON)
Non chiudere l’ingresso PIDC mentre il PID è in regolazione, si potrebbero determinare allarmi di
sovracorrente.
Attivare l’ingresso PIDC soltanto a PID non in regolazione.
Funzione di risparmio energetico
Questa funzione, quando il motore opera a velocità costante, minimizza
Corrispondenze
l’energia fornita al motore. Si adatta particolarmente bene per carichi a coppia
ridotta quali pompe e ventilatori. Per abilitare, programmare A085=01 mentre
con la funzione A086 si regola il tempo di risposta del risparmio energetico.
A085:Selezione del modo
operativo
A086:taratura della risposta e
Impostazione
Codici funzione
Abilitazione del
modo risparmio
energetico
Impostazioni
Tartura del tempo di
risposta e della
precisione del modo
risparmio energetico
Dati
00
A085
01
Codici funzione
A086
Contenuti
Funzionamento
normale
Risparmio
energetico abilitato
della precisione del modo
risparmio energetico
Dati
0
Risposta
Lenta
Precisione
Alta
100
Veloce
Bassa
4-32
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Seconda rampa di accelerazione e decelerazione
a
a
F002/F202: 1 /2 accelerazione 1
Impostando questa funzione è possibile cambiare i tempi di
F003/F203: 1a/2a decelerazione 1
accelerazione e di decelerazione.
A092/A292: 1a/2a accelerazione 2
I tempi possono essere cambiati mediante un ingresso opportunamente
programmato o in modo automatico al raggiungimento di una frequenza
A093/A293: 1a/2a decelerazione 2
opzionale programmabile.
A094/A294: 1a/2a selezione delle doppie rampe
Nel caso di cambiamento con ingresso assegnare la funzione 09(2CH)
A095/A295: 1a/2a frequenza per il cambio delle
ad un ingresso program mabile.
rampe di accelerazione
A096/A296: 1st/2nd frequenza per il cambio
delle rampe di decelerazione
C001-C005: Ingressi programmabili
Impostazione
Tempo di
accelerazione 2
Tempo di
decelerazione 2
Metodo di
cambio alle
seconde rampe
di accel / decel.
Frequenza di
cambio rampa
di
accelerazione
Frequenza di
cambio rampa
di
decelerazione
Codici
funzione
Dati
A092/A292
0.01-3600.
Unità : secondi (Esempio1,2)
A093/A293
0.01-3600.
Unità : secondi (Esempio1,2)
A094/A294
Contenuti
00
Cambiamento rampe mediante ingresso 09 (2CH) (Esempio1)
01
Cambiamento rampe mediante frequenza opzionale
(A095/A295, A096/A296) (Esempio2)
A095/A295
0.00-400.0
Unità: Hz Questa funzione è attiva solo se (A094/A294) è 01.
(Esempio2)
A096/A296
0.00-400.0
Unità: Hz Questa funzione è attiva solo se (A094/A294) è 01.
(Esempio2)
(Esempio1) Cambio rampe con ingresso A094/A294 = 00 (Esempio2) Cambio rampe con ingresso A094/A294
= 01
FW
FW
2CH
Accelerazione
Accelerazione
Decelerazione
Decelerazione2
A095/A295
A096/A296
Accelerazione1
Decelerazione
Accelerazione1
Decelerazione1
Frequenza di uscita
Frequenza di uscita
F002/
F202
F002/
F202/
F003/
F203
A092/A292
A093/A293
F003/
F203/
A092/A292
4-33
A093/A293
Capitolo4 Spiegazione delle funzioni
Corrispondenze
Profili delle rampe di accelerazione e decelerazione
A097: Profilo rampa di accelerazione
(1) Scelta del profilo
A098: Profilo rampa di decelerazione
Possono essere scelti diversi profili delle rampe di accelerazione e
di decelerazione in base all’applicazione.
A131: Guadagno di curvatura accel.
Scegliere i profilo più adeguato con le funzioni A097 e A098
A132: Guadagno di curvatura decel.
Funzion
e
Curva
00
01
02
03
Linea
Sigmoidale
Profilo ad U
Profilo ad U rovescio
Frequenza di uscita
Frequenza di uscita
Frequenza di uscita
Frequenza di uscita
A097
(accelerazione)
Tempo
Tempo
Tempo
Frequenza di uscita
Frequenza di uscita
Time
Frequenza di uscita
Frequenza di uscita
A098
(Decel-era
zione)
Tempo
Tempo
Tempo
Time
Accelera e decelera
linearmente sino alla
frequenza impostata
Evita partenze e
Utilizzate per macchine di avvolgimento e
fermate troppo brusche svolgimento o per vie a rulli
Contenut
limitando il rischio di
i
caduta del carico per
nastri trasportatori e
sollevatori
E’ possibile l’impostazione di profili di ram pa indipendenti per l’accelerazione e la decelerazione
(2) Guadagno per l’accentuazione della curvatura (grado di bombatura)
Il seguente è un disegno indicativo per dare un’idea nella scelta del grado di “bombatura”
Frequenza di uscita (Hz)
Frequenza di uscita (Hz)
Frequenza di uscita (Hz)
Obiettivo
frequenza
(100%)
Obiettivo
frequenza
(100%)
96.9
10
99.6
93.8
87.5
02
82.4
Obiettivo
frequenza
(100%)
10
68.4
64.6
65
02
35
17.6
10
25
10
12.5
6.25
02
3.1
02
35.4
31.6
10
50
75
Tempo
25
50
Tempo di accelerazione
per raggiungere il 100%
della frequenza
impostata
75
Tempo
Tempo di accelerazione
per raggiungere il 100%
della frequenza
impostata
25
50
75
Tempo di accelerazione
per raggiungere il 100%
della frequenza impostata
Nella zona centrale della caratteristica velocità tempo, la curva ad S, raggiunge accelerazioni molto elevate.
4-34
Tempo
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Mancanza istantanea di rete / Bassa-tensione
b001 :Abilitazione al riavvio
Arresto e ripartenza
b002 :Tempo massimo di mancanza
(1) A seguito di una mancanza istantanea di tensione o di un forte
istantanea/bassa
abbassamento di tensione si può scegliere di arrestare l’inverter
tensione
b003 :Ritardo alla ripartenza
segnalando un allarme oppure di riavviare l’inverter sen za
b004 :Allarme di mancanza istantanea di
segnalare alcun allarme (restart). Con la funzione b001 abilitata, a
seguito di una mancanza rete l’inverter tenterà di ripartire per 16
volte, dopo di che si bloccherà segnalando allarme alla 17a volta.
rete ad inverter fermo (stop)
b005 : Selezione del numero di ripartenze
b007 :Impostazione della frequenza
La funzione di riavvio automatico è attiva anche in caso di
intervento delle protezioni di sovracorrente o sovratensione. In
questo caso, l’inverter tenterà di ripartire, ma solo per tre volte ed
minima per il riaggancio al volo
C021-C022 :Ingressi programmabili
C026
:Relè di allarme
alla quarta volta si bloccherà segnalando allarme.
La funzione b004 consente di abilitare/disabilitare la segnalazione di allarme a seguito di una mancanza
rete intervenuta quando l’inverter si trova in stato di Stop.
Impostazione
Selezione modo di
riavvio
(Nota 3)
Massimo tempo
accettabile per una
mancanza di rete
Tempo di attesa alla
ripartenza
Codice
funzione
b001
Dati
Descrizione
00
01
02
00
Arresto con allarme.
Riavvio del motore partendo da 0Hz.
Riavvio con riaggancio “al volo” del motore . (esempio1)
Riavvio con riaggancio “al volo” del motore e successivo arresto in
rampa. Dopo aver arrestato il motore viene dato l’allarme. (Nota 1)
Unità : secondi
Se la mancanza di rete è più corta di questo tempo si ha il riavvio
(esempio1) se è più lunga si ha l’arresto in protezione (esempio2)
Unità: secondi
Tempo di ritardo prima di riavviare.
Disabilitato
Non c’è allarme e non viene generato un allarme ai terminali di uscita.
Abilitato
C’è l’allarme e viene generato un allarme ai terminali di uscita
Non c’è allarme e non viene generato un allarme ai terminali di uscita,
sia con l’inverter in Stop che in fase di decelerazione per un comando di
Stop.
L’inverter tenta di riavviare per 16 volte
01
L’inverter tenta di riavviare continuamente.
03
b002
0.3-1.0
b003
0.3-100.
00
Mancanza istantanea di
rete mentre l’inverter è in
stato di stop (Nota 2)
01
b004
02
Numero di tentativi di
riavvio dopo mancanza
istantanea di rete
b005
Impostazione della
minima frequenza per il
riaggancio “al volo”
b007
0.00-400.0
Unità:Hz
Quando la frequenza del motore, durante la marcia per inerzia, è
inferiore alla frequenza impostata in b007 si ha il riavvio da 0Hz .
(esempio 3,4)
(Nota 1) Nel caso in cui un blocco per sovratensione o per sovracorrente interviene nel mezzo della
decelerazione dopo il riaggancio del motore, viene memorizzato un errore di sottotensione (E16) e
l’inverter lascia il motore libero di ruotare (Free Run Stop). In tal caso, allungate il tempo di
decelerazione.
(Nota 2) Quando i terminali R0 -T0 per l’alimentazione del controllo sono collegati alla tensione continua del
circuito intermedio (terminali P-N), allo spegnimento dell’inverter può essere generato un errore di
sottotensione (E16). Se questo genera problemi al circuito esterno all’inverter, programmate la
funzione b004 a 00 o 02.
Riavvio con riaggancio: l’inverter misura la direzione e la velocità del motore e si riavvia partendo dalla
frequenza misurata. Funzione di riavvio con aggancio al volo (b001=02) esempi
t0 :tempo di mancanza istantanea di rete
t1 :tempo massimo per una mancanza istantanea
(b002)
t2 :tempo di ritardo al riavvio (b003)
(esempio1)
Alimentazione
Alimentazione
Uscita
dell’inverter
Uscita
dell’inverter
(esempio2)
Arresto inerziale
Velocità di rotazione
del motore
t 0
t 2
t 1
Essendo T0<T1 dopo T2 secondi si ha il riavvio
Arresto inerziale
Velocità di rotazione
del motore
4-35
t 0
t 1
Essendo T0>T1 si ha l’allarme
Capitolo 4 Spiegazione delle funzioni
(esempio3) riavvio con frequenza del motore>b007
(esempio4) frequenza del motore<b007
Alimentazione
Alimentazione
Uscita
dell’inverter
Marcia per inerzia
b007
Andamento della
velocità del
motore
0
Uscita
dell’inverter
Andamento della
velocità del motore
Marcia
per
b007
Riavvio con
0
aggancio
t0
t2
t0
t2
0Hz start
(2) Mancanza istantanea di rete in stato di stop (inverter fermo)
mediante la funzione b004 si può determinare se abilitare o disabilitare l’allarme per mancanza istantanea
di rete quando l’inverter è in stato di stop.
Comportamento inverter, segnale di allarme (AL) e di sottotensione (IP) in caso di mancanza rete, con:
-
terminali R0-T0 collegati alla rete di alim entazione inverter (standard) – Esempi 5 -7
-
terminali R0-T0 collegati alla tensione continua (terminali P-N) – Esempi 8 -10
(3)E’ possibile assegnare la funzione IP (08 – Stop per mancanza istantanea di rete), oppure UV (09
–sottotensione) alle uscite programmabili 11 -15 (C021-C025) o utilizzare semplicemente l’uscita di allarme
(C026)
(Nota 3) Il display dell’inverter appare come sotto durante la fase di riaggancio frequenza.
4-36
Capitolo 4 Spiegazione delle funzioni
Selezione della funzione di mancanza fase in ingresso
Questa funzione di protezione segnala la mancanza di una fase in ingresso.
Corrispondenze
Può essere abilitata o disabilitata.
b006:Selezione mancanza fase
Codice
Funzione
Dati
Descrizione
00
Disabilitata
Non c’è allarme per mancanza di fase.
b006
01
Abilitata
C’è allarme per mancanza di fase.
Quando l’inverter è alimentato con solo due fasi si possono determinare i seguenti problemi
(1) I’ondulazione di tensione sui condensatori (ripple) aumenta, riducendo la durata dei condensatori.
(2) Se l’inverter è a pieno carico, c’è il rischio di danneggiamento dei condensatori o del tiristore di precarica.
(3) la resistenza di precarica potrebbe danneggiarsi.
Corrispondenze
Protezione termica del motore (elettronica)
o
Impostare un livello di protezione termica adeguata alla
corrente nominale del motore al fine di evitare
o
b012/b212: 1 /2
livello di protezione termica
b013/b213: 1a/2a
selezione della caratteristica
di protezione termica
sovraccarichi, surriscaldamenti o danneggiamenti.
b015/b017/b019:
Prima dell’arresto in protezione viene fornito un segnale di
frequenze 1/2/3 della
caratteristica libera
avvertimento
b016/b018/b020:Correnti 1/2/3 della caratteristica libera
(1) Livello della protezione termica
Codice
funzione
C021-C022:uscite programmabili
Campo di impostazione
Dalla corrente nominale x 0.2
alla Corrente nominale x 1.2
(esempio) L300P -110LFU
b012/b212
Descrizione
C026:Relè di allarme
C061:livello di avvertimento della protezione termica
Unità:A
Corrente assorbita dal
motore(A) (in rapporto alla
corrente nominale
dell’inverter)
Tempo di
allarme(s)
Corrente del motore: 44A
Campo di impostazione: 8.8 - 52.8A
La caratteristica di protezione termica
60
riportata di fianco vale per b012=44A,
0.5
0
(2) Caratteristica della protezione termica
53.4
55.2
69
(116%) (120%) (150%)
Il livello di protezione tiene conto della velocità del motore, per cui
a basse velocità si ha una protezione più restrittiva (il motore si raffredda di meno alle basse velocità).
Codici
Funzione
Caratteristica del
termico elettronico
Caratteristica a
coppia ridotta
Caratteristica a
coppia costante
Impostazione libera
Dati
00
b013/b213
01
02
Quando la frequenza di uscita diminuisce,
diminuisce anche la capacità di raffreddamento del
motore.
La caratteristica a coppia ridotta è calcolata in
accordo con il riscaldamento prodotto da un
motore standard Hitachi
Le caratteristiche di protezione sono riferite al valore impostato in b012/b212 (considerato il 100%)
(a) Caratteristica a coppia ridotta
Il livello di protezione termica varia a seconda della frequenza di funzionamento.
(esempio): con b012 = 44(A)
considerato100%
Fattore di riduzione
della corrente
Tempo di
intervent
o (s)
X1.0
A 60Hz il diagramma del tempo di intervento
è confermato come qui sotto
A 20Hz i valori di corrente vanno moltiplicati
per 0.8 (come da diagramma a lato)
X0.8
60
X0.6
0
5
20
60
Frequenza
di uscita
(Hz)
4-37
Corrente motore (A)
in rapporto alla corrente
nominale dell’inverter)
0.5
0
40.8 42.2
(92.8%) (96%)
52.8
(120%)
Capitolo 4 Spiegazione delle funzioni
(b) Caratteristica a coppia costante
Oltre i 5Hz, il livello di protezione termica è indipendente della frequenza di funzionamento del motore
Fattore di riduzione della
(esempio): con b012 = 44(A)
considerato100%
Tempo di
intervent
o (s)
X1.0
A 60Hz il diagramma del tempo di intervento
è confermato come qui sotto
A 2.5Hz i valori di corrente vanno moltiplicati
per 0.9 (come da diagramma a lato)
X0.9
X0.8
60
0.5
0
2.5
5
60
Frequenza di
uscita (Hz)
0
45.9
47,5
54.9
(104%) (108%) (125%)
Corrente motore (A)
in rapporto alla corrente
nominale dell’inverter)
(3) Caratteristica termica ad impostazione libera
E’ possibile impostare liberamente la curva di protezione termica del motore, in funzione del carico
azionato ed a protezione sia del motore che dell’inverter.
Il campo di impostazione è indicato di seguito ;
Impostazione
(Esempio) b012 = 46(A), quando la frequenza di uscita=2.5Hz.
Codici funzione
Campo di
impostazion
Descrizione
b015/b017/b019
Da 0 a 400
Unità : Hz
b016/b018/b020
0.0
Disabilitata
Nota
0.1 - 999.9
Unità : A
e
Frequenze 1/2/3 della caratteristica
termica libera
Correnti1/2/3 della caratteristica
termica libera
Riduzione del livello
di protezione
Corrente di uscita (A)
b020
X1.
0
b018
X0.8
Campo di
impostazione
0
5
b016
400
Frequenza di
uscita(Hz)
0
b015 b017 b019
A004/A204
Massima frequenza(Hz)
(Esempio) b012=44(A), e la frequenza di uscita e’ uguale a b017
Tempo di
allarme (s)
(x):b018x116%
(y):b018x120%
(z):b018x150%
60
0.5
0
(x) (y)
(z)
Corrente motore (A)
in
rapporto
alla
nominale dell’inverter)
corrente
(3) Avvertimento termico
Prima dell’in tervento della protezione termica con l’arresto dell’inverter
si può aver un’uscita di
avvertimento. Il livello di avvertimento è impostabile in C061.
Assegnare 13(THM) ad un’uscita programmabile (C021-C022) o all’uscita del relè di allarme(C061).
Codice
funzione
C061
Dati
Descrizione
0.
Disabilitato
1.-100.
Unità : %
4-38
Capitolo 4 Spiegazione delle funzioni
Limitazione di sovraccarico / Pre-allarme sovraccarico
Corrispondenze
(1) Limitazione di sovraccarico
L’inverter controlla la corrente di uscita e se durante le fasi di accelerazione
b022:Livello di sovraccarico
o a velocità costante la corrente di uscita eccede il limite di sovraccarico
b023:Costante di sovraccarico
impostato riduce automaticamente la frequenza di uscita al fine di ridurre
l’assorbimento del motore. La funzione di limitazione di corrente ha lo scopo
accelerazioni o a fronte di rapidi cambiamenti del carico a velocità costante.
funzione
di
limitazione
può
essere
impostata
mediante
b024: Modalità di sovraccarico 2
b025: Livello di sovraccarico 2
di evitare l’intervento della protezione di sovracorrente durante brusche
La
b021:Modalità di sovraccarico
due
programmazioni Indipendenti: prima impostazione b021, b022, b023 ,
b026: Costante di sovraccarico 2
C001-C005: ingressi programmabili
C021-C022: uscite programmabili
C026:Impostazione relè allarme
seconda im postazione b024, b025, b026.
Per rendere operativa la seconda impostazione assegnare la funzione
C040:Segnale di avvertimento di
sovraccarico
39(OLR) ad un ingresso programmabile. Il Livello di sovraccarico b022 /
C041:livello del segnale di avvertimento
b025 è il valore di limitazione di corrente realizzato dalla funzione.
La costante di sovraccarico corrisponde al tempo impiegato dall’inverter per decelerare dalla frequenza
massima fino a 0Hz. L’ingresso OLR consente il passaggio dalla prima impostazione (b021, b022, b023) alla
seconda impostazione (b024, b025, b026 ).
Quando questa funzione è attiva il tempo di rampa di accelerazione potrebbe essere più lungo di quello
programmato. Se la limitazione di sovraccarico viene impostata ad un valore troppo basso, invece di
accelerare , si possono verificare interventi della protezione di s ovra-tensione dovuti all’energia rigenerata dal
motore a seguito di brusche decelerazioni imposte dalla limitazione di sovraccarico.
Quando la limitazione di sovraccarico lavora durante una rampa di accelerazione la frequenza impostata
potrebbe non essere raggiunta. In taluni casi operare come indicato:
Allungare il tempo di accelerazione.
Aumentare il boost di coppia.
Aumentare il livello di limitazione.
Codici
funzione
Impostazione
Selezione delle
modalità di lavoro
della limitazione di
sovraccarico.
Livello del limite di
sovraccarico
Costante di
sovraccarico
Dati
b021/b024
Descrizione
00
01
Disabilitata
Abilitata in accelerazione ed a velocità costante
02
Abilitata a velocità costante
b022/b025
Corr. nominale x 0.5 Corr. nominale x 1.5
b023/b026
0.1 to 30.0
Unità :A
Livello della limitazione di sovraccarico.
Unità: secondi. Tempo di decelerazione quando la
limitazione di sovraccarico lavora
Livello di limitazione di
sovraccarico
Decelerazione in accordo con la
costante di limitazione impostata
Frequenza di uscita
Frequenza massima
A004/A204/A304
Frequenza di
Set-Point
Frequenza di uscita
b023/b026
4-39
Capitolo 4 Spiegazione delle funzioni
(2) Segnale di avvertimento di sovraccarico
Il segnale di avvertimento di sovraccarico ha la funzione di avvisare della presenza di un sovraccarico
prima che l’inverter si arresti in protezione.
E’ utile a prevenire danni alla macchina azionata dovuti ad un carico eccessivo: per esempio, se un nastro
trasportatore viene sovraccaricato, la protezione per sovraccarico può bloccare l’inverter.
Assegnare 03 (OL) o 26(OL2) ad un uscita programmabile 11 -12 o al relè di allarme.
(per questo segnale sono disponibili due tarature)
Codici
funzione
Impostazioni
Selezione modalità
del segnale di
avvertimento di
sovraccarico
Dati
Descrizione
00
Abilitato a velocità costante, in accelerazione ed in
decelerazione
01
Abilitato solo a velocità costante
C040
0.0
Livello di intervento
del segnale di
avvertimento di
sovraccarico
C041
Disabilitato
Unità: A
Da 0.1 a
Quando la corrente raggiunge il livello impostato
Corr. nominale x 2
viene attivata l’uscita OL
Unità: A
Da 0.1 a
Quando la corrente raggiunge il livello impostato
Corr. nominale x 2
viene attivata l’uscita OL2
Limite di sovraccarico
b022/b025
Avvertimento di sovraccarico
C040
Corrente di uscita
OL
4-40
Capitolo 4 Spiegazione delle funzioni
Frequenza di minima
La frequenza minima è la frequenza più bassa con la quale l’inverter comincia ad
Corrispondenze
b082:frequenza di minima
operare.
Principalmente usata nella fase di taratura della coppia di avviamento.
Se questa frequenza viene impostata ad un valore troppo elevato , la corrente di a vviamento del motore cresce
e si ha il rischio di intervento della protezione di sovracorrente.
Codice
funzione
b082
Campo di
impostazione
0.10 to 9.99
Descrizione
Unità :Hz
FW
b082
Frequenza di uscita
Tensione
di
b036
Avviamento a tensione ridotta
Corrispondenze
Questa funzione fa si che la tensione all’avviamento aumenti con gradualità,
I valori più bassi determinano una maggiore coppia all’avviamento
Valori troppo alti provocano un indebolimento della coppia all’avviamento.
Valori troppo bassi possono causare l’intervento della protezione di s ovracorrente.
Codici
funzione
b036
00
01
Tempo di avviamento a
tensione ridotta
Disabilitata
Breve (circa 6ms)
06
Lungo (circa 36ms)
Dati
FW
Frequenza minima
b082
Frequenza di uscita
Tensione di uscita
00
01
---
4-41
06
b036:Selezione tensione
ridotta all’avviamento
b082:Frequenza minima
Capitolo 4 Spiegazione delle funzioni
BRD Frenatura dinamica
Questa funzione è attiva solo per gli inverter sino a L300P-15kW (compreso) in
Corrispondenze
quanto questi inverter sono dotati di unità di frenatura incorporata (BRD).
Lo scopo del circuito di frenatura è quello di smaltire sulla resistenza di frenatura
b090: BRD use rate
esterna l’energia rigenerata dal motore durante le fasi di decelerazione.
b095: BRD action selection
La rigenerazione avviene quando il motore viene decelerato troppo velocemente
b096: BRD on level
ed il motore diviene un generatore restituendo tensione all’inverter.
Questa funzione protegge termicamente la resistenza esterna di frenatura.
Impostazione
Codici
funzione
Dati
0.0
Descrizione
Frenatura (BRD) disabilitata
Si può impostare un incremento minimo di 0.1%.
Se viene superato il rapporto impostato l’inverter si arresta in errore.
Rapporto di
utilizzo della
b090
frenatura
0.1-100.0
Azione del BRD
t1
t2
t3
ON
ON
ON
100 secondi
Rapporto di utilizzo (%)
Modalità di
utilizzo del
b095
BRD
Livello di
b096
X100
00
BRD disabilitato
01
Durante la marcia: abilitato (Il BRD opera.)
Durante lo stop: disabilitato (Il BRD non opera.)
02
Durante la marcia e lo stop: abilitato (Il BRD opera.)
(Nota)
tensione di
intervento del
(t1+t2+t3)
100 secondi
Unità: V Impostazione per gli inverter classe 200V
330-380
(Nota)
Unità: V Impostazione per gli inverter classe 400V
660-760
(Nota) Il livello di tensione è riferito alla tensione continua dell’inverter.
BRD
Selezione dell’utilizzo del ventilatore di raffreddamento
Si può selezionare se il ventilatore funziona continuamente o solo quando l’inverter
Corrispondenze
b092:Selezione delle
è in marcia.
modalità di funzionamento
Codici
funzione
b092
del ventilatore
Dati
Descrizione
00
Il ventilatore è sempre in funzione
Il ventilatore è in funzione solo ad inverter in marcia
Comunque il ventilatore continuerà a funzionare per
cinque minuti dopo l’accensione e per cinque minuti
dopo il comando di stop.
01
4-42
Capitolo 4 Spiegazione delle funzioni
Ingressi programmabili
Corrispondenze
Gli ingressi da 1 a 5 sono associabili a svariate funzioni programmabili
in C001 sino a C005. Gli ingressi sono programmabili singolarmente e per ognuno
C001-C005: Ingressi programmabili
di essi si può stabilire il tipo di logica del contatto previsto (NA oppure NC).
Una funzione può essere associata solo ad un ingresso. La stessa funzione non può essere utilizzata su due o più ingressi
Se una funzione è già assegnata, ad esempio all’ingresso 3, e la stessa funzione viene assegnata anche ad un altro ingresso,
per esempio all’ingresso 4,
automaticamente l’inverter porterà la funzione dell’ingresso 3 al valore programmato
precedenza.
Codici
funzione
C001C008
Dati
Descrizioni
Riferimento
Pagina
Comando di marcia
4-15
Funzioni di multi-velocità
4-44
01
02
RV: Comando di marcia indietro
CF1: Multi-velocità1 (combinazione binaria)
03
CF2: Multi-velocità2 (combinazione binaria)
04
05
CF3: Multi-velocità3 (combinazione binaria)
CF4: Multi-velocità4 (combinazione binaria)
06
JG: Marcia ad impulsi
Marcia ad impulsi
4-46
07
08
DB: Comando esterno di iniezione in c.c.
SET: 2a Impostazione dei dati del motore
Comando esterno frenatura in c.c.
2a impostazione dati
4-27
4-47
09
2CH:Seconda impostazione delle rampe
Seconde rampe di accel/decel.
4-33
11
12
FRS: Arresto inerziale
EXT: Allarme esterno
Arresto inerziale
Allarme esterno
4-49
4-53
13
USP: Prevenzione alla ripartenza
Prevenzione alla ripart. dopo il ritorno rete
4-52
14
15
CS: Commutazione del motore sulla rete
SFT: Blocco software (dall’esterno)
Commutazione del motore sulla rete
Blocco software
4-50
4-48
16
AT:Scambio rif. in tensione a rif. in corrente
Riferimento analogico tensione/corrente
4-20
18
20
RS:Ripristino allarmi (reset)
STA : Comando di marcia con circuito a tre fili
Ripristino allarmi inverter
4-51
21
STP: Comando di arresto con circuito a tre fili
4-53
22
23
F/R: C.do di inversione con circuito a tre fili
PID:Abilitazione
del
PID
(abilitato/disabilitato)
Marcia arresto con auto ritenuta e comando
di inversione (circuito a tre fili)
Funzione PID
4-31
24
PIDC: reset contatore azione integrale PID
27
28
UP: motopotenziometro ingresso “aumenta”
DWN: motopotenziometro ingr. “diminuisci”
Motopotenziometro
4-52
29
UDC: cancellazione memoria motopotenzio.
31
32
OPE: forzatura comandi a OPE-SR
SF1-7:Multi-velocità 1 (selezione a bit )
Abilitazione forzata dell’operatore digitale
Multi-velocità
4-48
4-45
33
SF1-7:Multi-velocità 2 (selezione a bit )
Multi-velocità
4-45
34
35
SF1-7:Multi-velocità 3 (selezione a bit )
SF1-7:Multi-velocità 4 (selezione a bit )
Multi-velocità
Multi-velocità
4-45
4-45
36
SF1-7:Multi-velocità 5 (selezione a bit )
Multi-velocità
4-45
37
38
SF1-7:Multi-velocità 6 (selezione a bit )
SF1-7:Multi-velocità 7 (selezione a bit )
Multi-velocità
Multi-velocità
4-45
4-45
39
OLR: Scambio programmazione sovraccarico
Limiti di sovraccarico
4-39
no
NO: nessuna assegnazione
-
-
4-43
in
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Selezione della logica degli ingressi NA/NC
E’ possibile stabilire individualmente la logica di ogni ingresso
Impostazione
Selezione
ingressi
a/b(NA/NC)
logica
1-5
Selezione Ingresso FW
a/b (NA/NC)
Codici
funzione
C011-C015
C011-C015: Selezione della logica ingressi prog.
a/b (NA/NC)
Dati
Descrizione
00
A contatto (NA)
01
B contatto (NC)
00
A contatto (NA)
01
B contatto (NC)
C019
C019: Selez. logica ingresso FW a/b (NA/NC)
Contatto a: ”ON” chiuso, “OFF” aperto
Contatto b: ”ON” aperto, “OFF” chiuso
RS Il comando di reset può essere utilizzato solo
come N.A.
Utilizzo delle multi-velocità
E’ possibile impostare le multi velocità richiamandole mediante l’uso di
Corrispondenze
ingressi.
A019:
Selezione della multi-velocità
A020/A220:1a/2a multi-velocità numero “zero”
A021-A035: Multi-velocità da 1 a 15
Un modo di operare con le multi-velocità è il modo binario(combinatorio)
con il quale possiamo Impostare sino a 16 multi-velocità con quattro
C001-C005: Ingressi programmabili
ingressi, in alternativa con il modo “bit per bit” possiamo impostare e
richiamare sino a 8 multi-velocità utilizzando 7 ingressi
Impostazione
Codici funzione
Campo di impostazione
Descrizione
Mediante la combinazione di 4
ingressi si hanno 16 velocità
00
Selezione
modalità delle
multi-velocità
A019
01
Multi-velocità
0-15
A020/A220
-A035
Dalla frequenza minima alla
massima frequenza
Mediante
l’utilizzo
non
combinatorio di 7 ingressi si hanno
8 multi-velocità
Unità:Hz
(1) Operazione combinatoria binaria
E’ possibile impostare da 0 a 15 multi-velocità assegnando da 02 a 05 (da CF1 a CF4) agli ingressi programmabili.
Le frequenze corrspondenti alle velocità da 1 a 15 possono essere programmate con A021 sino ad A35 .
La frequenza corrispondente alla velocità 0 può essere programmata con A020/A220 o F001 quando la destinazione dei
comandi è da operatore digitale, se la destinazione è da esterno (terminale) la velocità 0 è impostabile con il riferimento
esterno (O,OI,O2).
Velocità 11
Velocità 10
Multi-velocità
CF4
CF3
CF2
CF1
Velocità 0
OFF
OFF
OFF
OFF
Velocità 1
Velocità 2
OFF
OFF
OFF
OFF
OFF
ON
ON
OFF
Velocità 3
OFF
OFF
ON
ON
Velocità 4
Velocità 5
OFF
OFF
ON
ON
OFF
OFF
OFF
ON
Velocità 6
OFF
ON
ON
OFF
Velocità 7
Velocità 8
OFF
ON
ON
OFF
ON
OFF
ON
OFF
Velocità 9
ON
OFF
OFF
ON
Velocità 10
Velocità 11
ON
ON
OFF
OFF
ON
ON
OFF
ON
Velocità 12
ON
ON
OFF
OFF
Velocità 13
Velocità 14
ON
ON
ON
ON
OFF
ON
ON
OFF
Velocità 15
ON
ON
ON
ON
Velocità 12
Velocità 9
Velocità
Frequenza da
operatore digitale o da
riferimento esterno
Velocità
Velocità15
Velocità 4
Velocità
Velocità
Velocita 2
Velocità 0
Velocità
Velocità
Velocità
Velocità 8
CF1
CF2
CF3
CF4
FW
4-44
Capitolo 4 Spiegazione delle funzioni
(2) Multi-velocità con selezione non combinatoria
E’ possibile impostare le multi-velocità da 0 a 7 assegando le funzioni da 32 a 38 (SF1-SF7) agli ingressi programmabili.
Impostare le frequenze corrispondenti alle multi-velocità SF1-SF7 nelle funzioni da A021 ad A027.
Multi-spe
ed
Velocità 0
SF7
SF6
SF5
SF4
SF3
SF2
SF1
OFF
OFF
OFF
OFF
OFF
OFF
OFF
Velocità 1
-
-
-
-
-
-
ON
Velocità 2
Velocità 3
-
-
-
-
ON
ON
OFF
OFF
OFF
Velocità 4
-
-
-
ON
OFF
OFF
OFF
Velocità 5
Velocità 6
-
ON
ON
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
Velocità 7
ON
OFF
OFF
OFF
OFF
OFF
OFF
Quando più ingressi sono attivi simultaneamente (contatto chiuso, per ingresso NA), prevarrà la multi-velocità con il numero
più basso.
Ovviamente deve essere fornito il comando di marcia all’inverter affinchè le multivelocità diventino operative.
0 velocità
4 velocità
3 velocità
2 velocità
1 velocità
SF1
SF2
SF3
SF4
SF5
SF6
SF7
FW
4-45
Riferimento di frequenza da
operatore digitale o da
riferimento esterno
5 velocità
6 velocità
7 velocità
1 velocità
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Marcia ad impulsi (JG)
A038
Questa funzione consente di far girare il motore con piccoli passi in modo da
:frequenza della marcia
ad impulsi
poter effettuare un posizionamento accurato.
A039
Impostare la funzione 06(JG) ad un ingresso programmabile.
:selezione della marcia
ad impulsi
(1) frequenza della marcia ad impulsi
C001-C005: ingressi programmabili
JG
FW
RV
Frequenza di uscita
A038
La marcia ad inpulsi non fa uso della rampa di accelerazione. A meno di specifiche esigenze, è consigliabile non impostare
frequenze troppo elevate, per contenere al minimo la corrente assorbita all’avviamento, ed evitare possibili interventi della
protezione di sovracorrente. Tarare convenientemente la frequenza di marcia impulsi (Jog) in A038.
Codice
Campo di impostazione
Descrizione
0.0 -Dalla frequenza minima a 9.99
Unità:Hz
funzione
A038
(2) Selezione delle modalità di arresto marcia ad impulsi al comando di Stop
Codice
funzione
A039
Dati
Priorità del comando di
marcia ad impulsi
con inverter già in marcia
Abilitato / disabilitato
Descrizione
00
Arresto inerziale del motore
01
Arresto con decelerazione
02
03
Arresto con iniezione di corrente continua.
Arresto inerziale del motore
04
Arresto con decelerazione
05
Arresto con iniezione di corrente continua.
Disabilitato (esempio1)
(nota 1)
Abilitato (esempio2)
(nota 1)
(Nota 1) quando viene eseguita la marcia ad impulsi chiudere il comando di marcia FW o RV dopo che si è chiuso il comando
di marcia ad impulsi (JG). (Lo stesso è valido anche se il comando di marcia proviene dall’operatore digitale.)
(Esempio1)
(Esempio2)
JG
JG
FW
FW
Arresto inerziale
Comando di frequenza
Comando
Quando A039= 00 o 01 o 02 e l’inverter si trova
già in marcia (il comando FW precede JG) il
comando di marcia ad impulsi non verrà eseguito.
di
Quando A039= 03 o 04 o 05 e l’inverter si trova già in
marcia (il comando FW precede JG) il comando di
marcia ad impulsi arresterà l’inverter e poi sarà
eseguita la marcia ad impulsi.
(Nota 2) In caso di A039 = 02 o 05, è necessario programmare i parametri di frenatura in continua (DB).
4-46
Capitolo 4 Spiegazione delle funzioni
Seconda parametrizzazione (SET)
La possibilità di parametrizzare in differenti modi l’iverter è particolarmente utile nel caso in cui ad un inverter siano collegati
due motori aventi diverse caratteristiche. Assegnando la funzione
08(SET) a un ingresso programmabile, attivando il
terminale è possibile cambiare la modalità di controllo e la parametrizzazione dell’inverter a seconda del motore azionato.
Selezionare il cambio al 2° set dei parametri solo ad inverter in condizione di STOP.
Elenco dei parametri soggetti a doppia parametrizzazione
F002/F202: 1o / 2o tempo di accelerazione
U
F003/F203: 1o / 2o tempo di decelerazione
a
a
V
a
a
W
A003/A203: 1 / 2 frequenza base
A004/A204: 1 / 2 frequenza massima
A20/A220: 1a / 2a impostazione multi-velocità “0”
Inverter
A041/A241: 1a / 2a Selezione del boost di coppia
Motor1
Motor2
A042/A242: 1o / 2o boost di coppia manuale
SET
A043/A243: 1o / 2o punto di boost di coppia manuale
o
o
A044/A244: 1 / 2 controllo
CM1
A061/A261: 1o / 2o limite superiore di frequenza
A062/A262: 1o / 2o limite inferiore di frequenza
A092/A292: 1o / 2o tempo di accelerazione 2
A093/A293: 1o / 2o tempo di decelerazione 2
A094/A294: 1a / 2a Selezione modalità della doppia rampa
A095/A295: 1a / 2a Selezione frequenza di cambio rampa in accelerazione
A096/A296: 1a / 2a Selezione frequenza di cambio rampa di decelerazione
b012/b212: 1o / 2o termico elettronico
b013/b213: 1a / 2a selezione caratteristica del termico
H003/H203: 1a / 2a Selezione potenza motore
H004/H204: 1a / 2a Selezione numero poli motore
H006/H206: 1a / 2a costante di stabilizzazione
La visualizzazione non differenzia in alcun modo la prima parametrizzazione dalla seconda.
Nel caso, verificate quale parametrizzazione è attiva controllando lo stato ON/OFF dell’ingresso di scambio parametri SET.
Se il comando per lo scambio dei parametri (1°, 2°), viene dato con l’inverter marcia, i nuovi parametri diverranno attivi solo
al primo comando di stop.
4-47
Capitolo 4 Spiegazione delle funzioni
Selezione del blocco software
Corrispondenze
Questa funzione è una protezione contro il cambio accidentale dei parametri.
b031
:Selezione delle modalità
del blocco software
Se il blocco alla programmazione è fatto a mezzo di un ingresso,
assegnare la funzione 15 (SFT) ad uno degli ingressi programmabili.
C001-C005: Ingressi programmabili
La tabella seguente riporta le varie modalità d’uso del blocco alla programmazione
Codici funzione
b031
Dati
00
Ingresso SFT
ON/OFF
Descrizione
Programmazione bloccata ecceto b031/Programmazione libera
01
ON/OFF
Programmazione bloccata eccetto per b031,F001,A020,A220,A320
A021-A035,A038 / Programmazione libera
02
-
03
-
10
-
Programmazione bloccata eccetto per b031
Programmazione bloccata eccetto per b031,F001,A020,A220,A320
A021-A035,A038
Programmazione bloccata eccetto per le funzioni programmabili con
inverter in marcia (riferirsi alla lista dei codici)
Abilitazione forzata dell’operatore digitale
Corrispondenze
La funzione 31(OPE) consente di trasferire forzatamente il
A001: Selezione comando di frequenza
comando di marcia all’operatore digitale (tasti RUN / STOP) ed
abilita le multivelocità interne (A020-A035) indipendentemente
A002: Selezione comando di marcia.
dalla programmazione originaria delle funzioni A001 ed A002
C001-C005: Ingressi programmabili
(destinazione del riferimento di frequenza e del comando di
marcia).
Assegnare la funz ione 31 (OPE) ad un ingresso programmabile ed attivarlo per trasferire i comandi all’operatore digitale:
viene abilitato il tasto RUN (si accende il LED verde sopra di esso) ed il riferimento di frequenza viene generato dalle
multivelocità interne.
Pertanto, in assenza di altre multivelocità attivate mediante una opportuna combinazione di ingressi programmabili (vedi alle
pagine precedenti), vale la “multivelocità 0” ossia la frequenza impostata in A020, modificabile / impostabile anche in F001 o
direttamente in modo Monitor da d001 agendo sui tasti “Aumenta” e “Diminuisci”.
Il comando di forzatura (OPE) viene eseguito anche nel caso l’inverter sia in marcia, determinando l’arresto del motore con
rampa di decelerazione e trasferendo immediatamente i comandi all’operatore digitale: Disattivando la funzione OPE, il
comando di marcia e riferimento di frequenza ritornano alle loro destinazioni iniziali programmate in A002 e A001: fare
attenzione che il comando di marcia non sia già attivo quando viene rimosso il comando di forzatura (OPE), per evitare
partenze indesiderate del motore.
Impostazione
Codici funzione
Dati
Selezione della destinazione del
riferimento di frequenza
A001
01
02
03
04
05
Terminale
Operatore digitale
RS485
Opzione 1
Opzione 2
Selezione della destinazione del
comando di marcia
A002
Ingressi programmabili
C001-C008
01
02
03
04
05
31
Terminale
Operatore digitale
RS485
Opzione 1
Opzione 2
OPE : Abiltazione forzata dei
comandi da operatore digitale.
4-48
Contenuti
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Arresto inerziale (FRS)
b088 :Selezione dell’ arresto inerziale
Quando viene attivata la funzione FRS, l’inverter smette istantaneamente di
modulare la tensione di uscita ed il motore si arresta in rotazione libera in un tempo
b003: Tempo di attesa alla ripartenza
b007: Impostazione delle frequenza limite
variabile dipendente dall’inerzia del carico.
per effettuare il riaggancio
Questa funzione ben si presta ad essere utilizzata per il comando di motori
autofrenanti: infatti il freno elettromagnetico può essere chiuso immediatamente
dopo il comando FRS senza causare interventi della protezione per sovracorrente.
b091: Selezione della modalità di arresto
C001-C005: ingressi programmabili
Assegnate la funzione 11(FRS) ad un terminale di ingresso: attivando il terminale, si ottiene l’arresto del motore in Free Run
Stop.
Coordinando la funzione FRS con il comando di marcia, l’inverter può riavviare un motore in rotazione libera con “riaggancio
al volo.”
Al rilascio del comando FRS, con il comando di marcia FW o RV ancora attivo, l’inverter attende per un tempo programmato
in b003 dopo di che riavvia il motore con “riaggancio al volo” alla velocità di rotazione residua - vedi esempio 2 qui sotto.
Con la funzione b007 si può impostare un valore di frequenza / velocità di rotazione residua al di sotto del quale il riaggancio
al volo non viene eseguito e l’inverter riavvia il motore comunque da 0Hz.
Programmando la funzione b091=01 il motore viene lasciato in libera rotazione (FRS) ogni volta che viene dato il c omando di
STOP e viene effettuato il “riaggancio al volo” al successivo comando di marcia inverter. Utilizzando questa funzione per
azionare un motore autofrenante, assicuratevi che b088=00 (il motore si presume sicuramente fermo per effetto del freno
elettromeccanico).
Codici
funzione
Dati
Selezione delle modalità
dell’arresto inerziale FRS
b088
00
01
Tempo di attesa
b003
0.3-100.
Impostazione della frequenza
di riaggancio
b007
0.00-400.0
Impostazioni
Descrizioni
Riavviamento da 0Hz (esempio 1)
Riaggancio al volo (esempio 2)
Unità:secondi
Tempo di attesa dopo il rilascio del comando FRS prima di
eseguire il riavvio del motore.
Unità:Hz
Frequenza di rotazione residua al di sotto della quale il motore
non viene riagganciato (l’inverter effettua la ripartenza da 0Hz)
(Esempio2) riaggancio al volo
(Esempio1) start da 0Hz
FW
FW
FRS
FRS
Velocità del motore
Arresto
inerziale
Arresto inerziale
Start da 0Hz
Velocità del motore
0
0
b003
Frequenza di
aggancio
Quando il comando FRS viene rilasciato , l’Inverter misura
la frequenza (veloc ità) di rotazione residua del motore e,
se non risulta inferiore al valore impostato in b007 , il
motore viene “riagganciato” e riavviato. Se si dovessero
verificare errori di sovracorrente in fase di “riaggancio”
del motore, aumentare il tempo di attesa alla ripartenza
(b003).
Avviamento da 0Hz indipendentemente dalla velocità
residua del motore. In questo caso il tempo di attesa
(b003) al rilascio del comando FRS non viene
rispettato: se la velocità di rotazione del motore è
ancora alta c’è il rischio di intervento della protezione
di sovracorrente.
Nota: se il motore si trova in rotazione libera a seguito di una mancanza rete, ed il contatto di marcia FW rimane chiuso, al
ritorno della rete il contatto FRS deve trovarsi già chiuso: al rilascio del contatto FRS, l’inverter effettua il “riaggancio al volo”
del motore (premesso che la funzione sia abilitata con b088=01).
4-49
Capitolo 4 Spiegazione delle funzioni
Commutazione del motore da rete ad inverter (CS)
Corrispondenze
Questa funzione è utilizzata per avviare un motore che richieda un’elevata
b003 : Tempo di attesa alla ripartenza
coppia di avviamento. Il motore viene avviato da rete e successivamente
b007 : Frequenza di aggancio
commutato sull’inverter. Questa funzione consente di contenere la potenza
C001-C005
: Ingressi programmabili
dell’inverter sfruttando la rete per l’avviamento.
Per esempio, volendo trasformare a velocità variabile una macchina azio nata a giri fissi da un motore alimentato da rete
15kW 4 poli (avente una coppia nominale indicativa 100Nm), se la macchina richiede una coppia di avviamento di 250Nm ma
la coppia di normale funzionamento è di soli 80Nm, utilizzando questa funzione sarà s ufficiente installare un inverter di taglia
nominale 15kW invece di sovradimensionarlo a 30kW affinchè possa fornire al motore la corrente necessaria per generare la
coppia di avviamento richiesta.
Assegnare la funzione 14 (CS) ad un ingresso programmabile e riferirsi alla sequenza e lo schema qui sotto.
Quando il motore è già stato avviato direttamente da rete, si effettua lo scambio aprendo MC2 e chiudendo MC3
Alimentare l’inverter chiudendo MC1, prima chiudere il contatto CS, poi il contatto di marcia.
Rilasciando il contatto CS, l’inverter effettua l’aggancio al volo del motore dopo un tempo di attesa programmabile in b003.
Con la funzione b007 si può programmare una frequenza al di sotto della quale il riaggancio ala volo non viene più effettuato
(per maggiori dettagli vedi funzione FRS).
L’’alimentazione dei terminali R0 e T0 a monte del contattore MC1 consente di mantenere alimentata la logica di controllo e
togliere la tensione ai circuiti di potenza: lo schema è indicativo, la funzione CS è comunque disponibile ance partendo da
inverter completamente spento (purchè siano rispettate le sequenze come nei diagrammi a lato).
Se interviene la protezione di sovracorrente, in fase di aggancio alla frequenza di rotazione del motore, aumentare il tempo
di attesa alla ripartenza b003.
Una volta che l’alimentazione del motore passa attraverso l’inverter, è possibile utilizzare anche la funzione di riavvio
automatico: in questo caso, l’uso del terminale CS non è più necessario. Per maggiori informazioni, riferirsi alla funzione
Reset (RS).
Esempio delle sequenze di comando e dei collegamenti da effettuare.
MC2
ON
MC1
NFB
ELBC
MC1
MC3
R
S
T
U
V
W
THRY
Tempo di interblocco tra MC2
e MC3 (0.5 a 1 s.)
(0.5-1 second)
ON
MC2
Motor
ON
MC3
Ro
To
H
O
L
FWY
FW
RVY
RV
CSY
CS
FW
Normalmente da 0.5 a 1 s
AL1
CS
AL2
OFF
ON
b003 Tempo di attesa
AL0
Frequenza di uscita
CM1
Inverter in marcia
Frequenza di aggancio
4-50
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Reset (RS)
Questa funzione ripristina l’inverter dopo l’intervento di una protezione. Il reset può
b003
: Tempo attesa al riaggancio
essere eseguito premendo il tasto STOP/RESET sull’operatore digitale oppure
b007
: Frequenza di riaggancio
mediante un impulso di chiusura all’ingresso a cui è assegnata la funzione di reset.
C102
: Modalità di reset
Per utilizzare il comando di reset dall’esterno assegnare la funzione 18(RS) ad un
C103
: Modalità di riaggancio
ingresso programmabile.
C001-C005 : Ingressi programmabili
Mediante la funzione C103 si può decidere se dopo un comando di reset venga eseguito l’aggancio in velocità del motore
oppure la ripartenza da 0 Hz. Mediante la funzione C102 viene selezionata la modalità di lavoro del comando di reset.
L’ingresso di reset (RS) può essere solo di tipo Normalmente Aperto (NA).
Se l’ingresso di reset resta chiuso più di 4 secondi l’inverter si protegge visualizzando l’errore di comunicazione.
Impostazione
Codici
funzioni
Dati
Tempo di attesa al riaggancio
b003
0.3-100.
Frequenza di aggancio
b007
0.00-400.0
Selezione della modalità del
comando di reset.
Selezione della modalità di
riavvio dopo un comando di
Reset
C102
C103
Descrizione
Unità: secondi
Dopo un reset l’inverter attende “b003” secondi prima di
ripartire. (Vedi anche funzione di riavvio automatico per
istantanea mancanza di rete)
Unità:Hz
E’ la frequenza a cui viene riagganciato il motore
(Vedi anche funzione di riavvio automatico per istantanea
mancanza di rete)
00
Reset attivo sul fronte di salita (Esempio1)
Comando attivo anche con inverter non in allarme
01
Reset attivo sul fronte di discesa (Esempio2)
Comando attivo anche con inverter non in allarme
02
Reset attivo sul fronte di salita (Esempio1)
Comando attiivo solo se inverter è in allarme.
00
Dopo Reset ripartenza da 0Hz
01
Dopo Reset, ripartenza con aggancio (Esempio3)
(Esempio1)
(Esempio2)
RS
RS
Alllarme
Allarme
Esempio3) riavvio dopo un comando di Reset con funzione di riaggancio in velocità del motore.
Nell’esempio sotto, si tratta del Reset automatico che l’inverter genera internamente ogni volta che viene acceso.
Programmando la funzione C103 = 01, si può in questo caso alimentare l’inverter con il contatto di marcia chiuso e attivare
automaticamente la funzione di “riaggancio al volo” del motore in rotazione libera per effetto dell’inerzia del carico.
Il tempo di attesa prima di tentare il riaggancio è impostabile in b003. La frequenza minima di rotazione residua per la quale
l’inverter effettua il riaggancio è impostabile in b007.Con la funzione C103 = 00 il contenuto di b003 e b007 viene ignorato e
la ripartenza avviene da 0Hz.
Alimentazione
FW
Arresto inerziale
Velocità motore
4-51
Frequenza di riaggancio
Capitolo 4 Spiegazione delle funzioni
Prevenzione alla ripartenza (USP)
Corrispondenze
La funzione USP evita la ripartenza incontrollata del motore dopo una mancanza
C001-C005: Ingressi programmabili
di rete se il comando di marcia rimasto attivo (ritorno rete con RUN chiuso)
Con la funzione USP attivata, l’inverter va in allarme ed il display mostra il codice E13. L’allarme può essere ripristinato sia
con un comando di reset oppure semplicemente aprendo il comando di marcia. (Esempio 1)
Se il ripristino viene fatto con il comando di reset e il comando di marcia è chiuso l’inverter riparte automaticamente
(Esempio2).
Quando il comando di marcia è attivato dopo l’alimentazione di rete, l’inverter reagisce normalmente al comando di marcia.
(Esempio 3)
Assegnare la funzione 13 (USP) ad un ingresso programmabile. Il funzionamento della funzione USP è di seguito illustrato.
(Esempio1)
(Esempio3)
(Esempio2)
Alimentazione
Alimentazione
FW
FW
USP
USP
RS
RS
Allarme
Alimentazione
FW
USP
RS
Allarme
Frequenza di uscita
Allarme
Frequenza di uscita
Frequenza di uscita
Corrispondenze
Funzione Aumenta/Diminuisci (motopotenziometro)
La frequenza di uscita può essere impostata mediante l’utilizzo di due ingressi digitali
C101
:Abilitazione
(selezionabili tra ingresso 1 a 5) a cui vengono assegnate le funzioni 27(UP) e 28(DWN).
memoria
del
La funzione “motopotenziometro” è attiva soltanto quando la destinazione del comando di
C001-C005: Ingressi programmabili
moto-potenziometro
frequenza è A001=01 oppure A001 =02 . Quando A001=01 (riferimento da terminali di ingresso analogico) la funzione è attiva
solo nell’utilizzo delle multi-velocità. ll motopotenziometro non è quindi attivo quando il riferimento proviene da un ingresso
analogico oppure è attivo un comando di marcia ad implusi. (JG).
Quando l’ingresso “Aumenta” o “Diminuisci” è attivo, la frequenza di uscita aumenterà o diminuirà secondo i tempi di rampa
impostati in F002/F003, F202,/F203. La funzione motopotenziometro utilizza il 2° tempo di accellerazione/decelerazione se
viene attivato, prima del comando di marcia, il terminale di ingresso con la funzione 08(SET).
Allo spegnimento dell’inverter, l’ultimo valore del riferimento di frequenza che è stato impostato con le funzioni
Aumenta/Diminuisci può essere mantenuto in memoria programmando la funzione C101 (memoria del motopotenziometro)
abilitata/disabilitata. La memoria può essere cancellata assegnando la funzione 29(UDC) ad un ingresso programmabile:
attivando l’ingresso si cancella la memoria ed il riferimento di frequenza viene azzerato.
Codici funzione
Dati
00
C101
Descrizione
Memoria del motopotenziometro disabilitata: dopo lo spegnimento dell’inverter la porzione di
frequenza modificata con il motopotenziometro viene cancellata (alla riaccensione, ritorna la
frequenza impostata prima dell’utilizzo del motopotenziometro)
Il valore di frequenza impostato con il motopotenziometro viene mantenuto in memoria.
Dopo lo spegnimento, alla riaccensione il riferimento di frequenza resta invariato.
01
Comando di marcia
(FW, REV)
UP
Se gli ingressi di aumenta e
diminu isci sono entrambi chiusi non
si ha alcuna variazione di frequenza
DWN
Frequenza di uscita
4-52
della
Capitolo 4 Spiegazione delle funzioni
Allarme esterno (EXT)
Corrispondenze
Questa funzione di ingresso serve per forzare l’inverter in condizione di allarme
C001- C005: Ingressi programmabili
mediante l’uso di un contatto esterno.
Per utilizzare la funzione, assegnare 12 (EXT) ad un ingresso programmabile:
attivando il terminale, l’inverter viene forzato in allarme e viene visualizzato l’errore E12 (l’inverter smette di generare
frequenza).
L’errore viene mantenuto anche se l’ingresso viene disattivato: per ripristinare è necessario dare un comando di reset oppure
spegnere e riaccendere l’inverter.
Comando di marcia
FW/REV
Ingresso allarme esterno
Arresto inerziale
Velocità
motore
del
Ingresso di reset
Uscita di allarme
Comando di marcia/arresto con autoritenuta (tre fili)
Corrispondenze
Questa funzione è utilizzata per avviare e arrestare l’inverter con un comando
C001- C005: Ingressi programmabili
impulsivo (ad esempio, pulsanti di Marcia / Arresto).
Selezionare la destinazione del comando di marcia da terminale A002=01
Assegnare le funzioni 20(STA),21(STP) e 22(F/R) (Start, Stop e Inversione) a tre ingressi programmabili.
Quando ad un terminale viene assegnata la funzione STP, i terminali FW e RV vengono automaticamente disabilitati:
completare l’assegnazione degli altri due terminali per utilizzare questa modalità operativa.
Di seguito è riportata la sequenza del circuito di marcia/arresto/inversione in esecuzione “tre fili”.
Nota: il comando di inversione 22 (F/R) deve essere ritenuto (non impulsivo).
ON
STA
STP
OFF
ON
OFF
F/R
Frequenza
uscita
di
Avanti
Indietro
4-53
Capitolo 4 Spiegazione delle funzioni
Impostazioni delle uscite programmabili
Corrispondenze
Ciascuna delle funzioni descritte nella tabella può essere assegnata alle
uscite programmabili (terminali 11 e 12 ) ed al relè di allarme.
La logica del relè di uscita è programmabile come Normalmente Aperto /
C021-C022
C026
: Uscite programmabili
:Impostazione del relè di
allarme
Normalmente Chiuso ( NA/NC) – (a o b)
Dati
Descrizione
Contenuti
Pagina
Segnale attivo con inverter in marcia
4-56
Segnale di arrivo in frequenza
4-56
OL: Preallarme sovraccarico
Al superamento del livello impostato
4-39
04
OD: Errore eccessivo controllo PID
Funzione PID
4-31
05
AL: Uscita di allarme
Protezione
06
FA3: Uscita di Set-Point raggiunto
Segnale di arrivo in frequenza
4-56
08
IP: arresto temporaneo per mancanza rete
UV: Segnalazione bassa tensione alimentazione
Arresto istantaneo/bassa tensione
4-35
09
11
RNT: Tempo cumulativo di inverter in RUN scaduto Tempo di RUN scaduto
4-58
12
ONT: Tempo cumulativo di inverter ON scaduto
Tempo di Power ON scaduto
4-58
13
THM: Preallarme protezione termica
Preallarme intervento termica
4-38
00
RUN: Uscita di inverter in marcia
01
FA1: Segnale di arrivo in frequenza modalità FA1
02
FA2: Segnale di arrivo in frequenza modalità FA2
03
4-54
-
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Selezione della logica delle uscite (NA/NC)-(a/b)
Questa funzione consente di stabilire se le uscite saranno di tipo
C031-C032
Normalmente Aperto o Normalmente chiuso. (valido anche per il relè
C036
di allarme). Ciascuna uscita è programmabile in modo indipendente.
:selezione della logica uscite
11-12 a/b (NA/NC)
:Selezione della logica del relè
di allarme a/b (NO/NC)
Le uscite sono di tipo a relè.
Impostazione
Codice funzione
Selezione della logica
delle uscite 11-12
a/b(NA/NC)
Selezione della logica del
relè di allarme – contatto
tipo a/b (NA/NC)
Dati
Descrizione
00
Contatto a (NA)
01
Contatto b (NC)
00
Contatto a (NA)
01
Contatto b (NC)
C031-C032
C036
contatto a : Chiuso= {ON}, Aperto= {OFF}.
contatto b : Aperto= {ON}, Chiuso= {OFF}.
(1) Specifiche tecniche delle uscite programmabili 11 e 12 (contatto pulito relè).
11C 11A
12C
---
12A
Lato inverter
Funzione
C031-C032
Tensione di
alimentazione
Stato logico
dell’uscita
Stato fisico
delle uscite 11-12
00
(contatto a)
On
ON
OFF
Chiuso
Aperto
Off
-
Aperto
On
ON
OFF
Aperto
Chiuso
Off
-
Aperto
01
(contatto b)
Massimo
Minimo
Carico
Resistivo
AC250V, 5A
DC30V, 5A
DC1V
Carico
Induttivo
AC250V, 1A
DC30V, 1A
1mA
(2) Specifiche del relè di allarme (contatto in scambio)
ALO
Lato inverter
AL1
AL2
Esempio di utilizzo come contatto di allarme
Funzione
C036
00
(Contatto a)
01
(Contatto b)
Tensione di
alimentazion
e
Stato
Stato
dell’uscita
dell’inverter
AL1-AL0 AL2-AL0
On
In allarme
Normale
Chiuso
Aperto
Aperto
Chiuso
Off
-
Aperto
Chiuso
On
In allarme
Normale
Aperto
Chiuso
Chiuso
Aperto
Off
-
Aperto
Chiuso
Specifiche del contatto
Massimo
AL1-AL0
Minimo
Massimo
AL2-AL0
Minimo
4-55
Carico resistivo
Carico induttivo
AC250V, 2A
DC30V, 8A
AC100V, 10mA
DC5V, 100mA
AC250V, 1A
DC30V, 1A
AC100V, 10mA
DC5V, 100mA
AC250V, 0.2A
DC30V, 0.6A
AC250V, 0.2A
DC30V, 0.2A
Capitolo 4 Spiegazione delle funzioni
Uscita segnale di marcia (RUN)
Corrispondenze
Questa funzione provvede a fornire un’uscita quando l’inverter è in stato di marcia.
C021-C022: Uscite programmabili
Assegnare 00(RUN) ad un’uscita programmabile 11 – 12 o al relè di allarme.
L’uscita è mantenuta attiva anche durante la frenatura in corrente continua.
L’uscita opera nel modo indicato;
Frequenza
di
Uscita di RUN
Segnale di arrivo in frequenza (FA1, FA2, FA3)
Al termine della rampa di accelerazione al raggiungimento della frequenza impostata
l’uscita si attiva.
Corrispondenze
Assegnare 01(FA1:a velocità costante), 02(FA2:sopra la frequenza impostata 1) oppure
C021-C022: Uscite programmabili
C042: Frequenza 1 in accelerazione
06(FA3:solo alla frequenza di Set-Point) ad un uscita programmabile 11-12 o al relè
C043: Frequenza 1 in decelerazione
di allarme.
L’isteresi dell’uscita del segnale di arrivo in frequenza è la seguente.
Quando l’uscita è ON :
ON con (frequenza impostata –1% Frequenza massima)(Hz)
Quando l’uscita è OFF: OFF con (frequenza impostata – 2% Frequenza massima)(Hz)
Nel caso di utilizzo di 06(FA3) o di inverter in accelerazione
Quando l’uscita è ON : ON con (frequenza impostata –1% Frequenza massima)(Hz)
Quando l’uscita è OFF: OFF con (frequenza impostata +2% Frequenza massima)(Hz)
Quando l’inverter decelera
Quando l’uscita è ON :
ON con (frequenza impostata +1% Frequenza massima)(Hz)
Quando l’uscita è OFF: OFF con (frequenza impostata – 2%Frequenza massima)(Hz)
Impostazioni
Segnale di arrivo
in frequenza in
accelerazione
Segnale di arrivo
in frequenza in
decelerazione
Codici funzione
C042
Dati (Hz)
0.0
0.01-400.0
0.0
C043
0.01-400.0
Descrizione
Non viene attivata l’uscita in accelerazione
Viene attivata l’uscita in accelerazione per
frequenze sopra al valore impostato
Non viene attivata l’uscita in decelerazione
Viene attivata l’uscita in decelerazione per
frequenze sopra al valore impostato
Nota: se vengono utilizzate le funzionalità FA2 oppure FA3 programmare entrambe le soglie (non una sola soglia in
accelerazione o decelerazione). In caso contrario, lasciarle impostate a 0.0Hz come da programmazione di fabbrica
4-56
Capitolo 4 Spiegazione delle funzioni
(1) Uscita attiva a velocità costante (01:FA1)
Quando l’inverter arriva alla frequenza impostata (F001, A020,A220) o una multi-velocità (A021-A035), l’uscita si attiva.
Frequenza
f
impostata
On
F on : 1% della frequenza massima
Isteresi
f
F o f f: 2% della frequenza massima
Off
Frequenza
(Esempio) Frequenza massima f max=120(Hz)
Frequenza impostata f set=60(Hz)
f on=120 x 0.01=1.2(Hz)
f off=120 x 0.02=2.4(Hz)
Freq. di attivazione in acc.:ON with 60 - 1.2=58.8(Hz)
Freq. di attivazione in dec.:OFF with 60 2.4=57.6(Hz)
di uscita
FA1
(2) Uscita attiva per un valore di frequenza superiore ad un valore impostato (02:FA2)
Quando la frequenza di uscita dell’inverter è superiore alla frequenza impostata in [C042, C043 (FA2)] l’uscita viene
attivata.
C043
C042
f
f
On
Off
f
On
: 1% della frequenza massima
f
Off
: 2% della frequenza massima
Frequenza di uscita
FA2
(3) Uscita attiva alla frequenza impostata (06:FA3)
L’uscita si attiva solo alla frequenza impostata in [C042, C043 (FA3)]
Nota: programmare le soglie come nel diagramma sotto (C042 più bassa di C043) per avere il funzionamento come in
diagramma.
NON UTILIZZARE CON LA FUNZIONE PID INSERITA
f
C042
f
f
On
f
Off
On
Frequenza
di uscita
FA3
4-57
C043
Off
f
On
: 1% della frequenza massima
f
Off
: 2% della frequenza massima
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Tempo inverter in marcia (RUN) /
Tempo inverter alimentato (RNT/ONT)
Quando il tempo di funzionamento accumulato raggiunge o supera
il valore impostato in b034, viene attivata una uscita programmabile.
Il tempo b034 può essere associato indifferentemente a l’uscita
RUN time (RNT) legata al tempo di inverter in marcia oppure all’uscita
b034
C021-C022
C026
d016
d017
ON time (ONT), legata al tempo di inverter alimentato.
Codici funzione
Dati
0.
b034
1. -9999.
1000-6553
:livello di avvertimento
:Uscite programmabili
:Uscita di allarme
:Registro di accumulo inverter in
marcia
:Registro di accumulo inverter
alimentato
Descrizione
Non abilitata.
Impostabile con unità di 10 ore.
Impostabile con unità di 100 ore. (10000-65530 ore)
(1)Tempo di inverter in marcia (RNT)
Assegnare la funzione 11 (RNT) ad un’uscita programmabile 11-12 (C021-C022) o al relè di allarme (C026)
Impostare il livello di avvertimento con b034.
(2)Tempo di inverter alimentato (ONT)
Assegnare la funzione 12 (ONT) ad un’uscita programmabile 11-12 (C021-C022) o al relè di allarme (C026)
Impostare il livello di avvertimento con b034.
4-58
Capitolo 4 Spiegazione delle funzioni
Uscita FM
Corrispondenze
L’uscita FM può essere programmata come segnale di frequenza di uscita o come
segnale di corrente di uscita. Il segnale è di tipo PWM (modulato nel tempo) e quindi
C027:selezione delle modalità
adatto per strumentazione di tipo “vero RMS” oppure per strumentazione analogica
dell’uscita FM
di tipo magneto elettrico.
b081: taratura dell’uscita FM
(1) Selezione di FM
Selezionare l’uscita FM secondo le seguenti modalità.
Nel caso sia selezionato il codice 03 (uscita digitale di frequenza) si dovrà utilizzare un frequenzimetro
Per tutte le altre selezioni utilizzare uno strumento analogico magneto elettrico.
Codice
Dati
funzione
C027
Descrizione
Campo di variazione
00
Frequenza di uscita (esempio 1)
0- massima frequenza(Hz)
01
Corrente di uscita (esempio 1)
03
Frequenza di uscita digitale (esempio 2)
04
Tensione di uscita (esempio 1)
0-100%
05
Potenza elettrica in ingresso (esempio 1)
0-200%
06
Rapporto di carico termico (esempio 1)
07
Frequenza di LAD (esempio 1)
0-200%
0-massima frequenza(Hz)
0-100%
0-Frequenza massima(Hz)
(Esempio 2) Valori impostati: 03
(Esempio 1) Valori impostati:00, 01, 02, 04, 05, 06, 07
t
t
T
T
Periodo T: constante (6.4ms)
Rapporto t/T : variabile
Periodo T: variabile
Rapporto t/T : 50%fisso
(2) Taratura FM
Questa funzione è utilizzata per calibrare lo strumento collegato all’uscita FM.
Codice funzione
Campo di
Descrizione
impostazione
b081
0. -255.
Impostabile in unità
(Metodo di calibrazione)
(1) Collegare lo strumento ai terminali FM-CM1.
(2) tarare b081 in modo che lo srtumento indichi esattamente la frequenza di uscita.
(Esempio): Quando la frequenza di uscita è 60 Hz , tarare il valore di b081 affinchè anche lo strumento indichi 60 Hz.
4-59
Capitolo 4 Spiegazione delle funzioni
Uscite analogiche AM ed, AMI
Corrispondenze
Le uscite analogiche AM ed AMI possono monitorare o la frequenza di uscita o
la corrente di uscita.
b080 :Taratura uscita AM
L’uscita AM è un’uscita analogica con segnale in tensione da 0-10Vcc.
C028 : Selezione AM
L’uscita AMI è un’uscita analogica con segnale in corrente da 4-20mA.
C029 : Selezione AMI
C086 :Taratura offset di AM
C087 : Taratura AMI
(1)Selezione AM, AMI
C088 :Taratura offset di AMI
Selezionare il segnale delle due uscite analogiche;
Selezione
Codici funzione
AM/AMI
C028/C029
Dati
00
Contenuti
Frequenza di uscita
Campo di variazione
0-massima frequenza(Hz)
01
Corrente di uscita
0-200%
04
05
Tensione di uscita
Potenza elettrica di
ingresso
0-100%
0-200%
06
Rapporto di carico
termico
0-100%
07
Frequenza di LAD
0-massima frequenza(Hz)
(2) Taratura di AM e di AMI
Queste funzioni servono per tarare gli strumenti collegati alle uscite AM ed AMI
Codici
funzione
Dati
Taratura di AM
Taratura
offset
AM
b080
0. -255.
Taratura successiva alla taratura dell’offset con C086
C086
0.0-10.0
Unità:V
Taratura di AMI
C087
0. -250.
Taratura successiva alla taratura dell’offset con C088
Taratura offset
AMI
C088
0.0-20.0
Unità:mA
Impostazione
Descrizione
Termistore esterno
Corrispondenze
Fra i terminali TH e CM1 è possibile collegare il termistore di protezione
b098: Selezione del termistore
termica del motore.
Impostare le funzioni secondo la seguente tabella e sulla base delle specifiche del
C085: Taratura del termistore
termistore.
Impostazione
Selezione del termistore
b099: Livello di intervento protezione
Codici
funzione
Dati
Contenuti
00
Disabilitato
(Non è prevista alcuna protezione termica del motore con
termistore )
01
02
Abilitato l’uso di PTC
Abilitato l’uso di NTC
b098
Livello di protezione
b099
0. -9999.
Unità: Ohm
Impostare il valore di resistenza per cui si ha l’intervento
della
protezione, in accordo con la caratteristica del
termistore
Tarature termistore
C085
0.0-1000.
Usare questa funzione come “guadagno” per la taratura
4-60
Capitolo 4 Spiegazione delle funzioni
Ritorno ai dati di fabbrica
Corrispondenze
E’ comunque sempre possibile ritornare ai dati iniziali dell’inverter (dati impostati in fabbrica)
b084: Selezione inizializzazione
b085: Selezione dei dati iniziali
Anche la memoria degli allarmi può essere cancellata in ogni momento
Ricordarsi comunque che in caso di problemi, la storia degli allarmi è un utile riferimento per la ricerca guasti.
I dettagli per la inizializzazione sono di seguito riportati;
Codici
Impostazioni
Dati
funzione
Descrizione
00
Viene cancellata solo la memoria degli errori.
Vengono inizializzate solo le funzioni.
Selezione
b084
inizializzazione
01
Le funzioni torneranno ai valori memorizzati prima
della consegna
Selezione dei dati
b085
iniziali
02
Si ha l’inizializzazione e la cancellazione degli errori.
00
Inizializzazione per il mercato Giapponese
01
Inizializzazione per il mercato Europeo
02
Inizializzazione per il mercato Americano.
(Metodi di inizializzazione)
Procedere come di seguito indicato.
HITACHI
RUN
PRG
POWER
POWER
HITACHI
RUN
ALARM
ALARM
PRG
Hz
FUNC
MIN
RESET
1
2
FUNC
STR
(1) Mantenere premuti
contemporaneamente i tasti FUNC, UP
(freccia verso l’alto), DOWN (freccia verso
il basso) In queste condizioni premere il
tasto STOP / Reset.
Quando la visualizzazione incomincia a
lampeggiare e ruotare rilasciare i quattro
tasti.
Durante
STOP/
RUN
MAX
l’inizializzazione
MIN
RESET
1
2
MAX
STR
(2) Questa è la visualizzazione durante
l’inizializzazione
Esempio di taratura per il mercato
Giapponese. La altre visualizzazioni
sono sotto riportate.
STOP/
RUN
FUNC
1
l’inizializzazione
di
della
memoria degli errori.
Questi segmenti ruotano verso sinistra.
4-61
2
MAX
STR
(3) Quando viene visualizzato
“d001” l’inizializzazione è
completata.
inverter per mercato Americano.
Durante
MIN
RESET
di
l’inizializzazione
ALARM
V
kW
A
%
inverter per mercato Europeo.
Durante
POWER
Hz
V
kW
A
%
STOP/
RUN
PRG
Hz
V
kW
A
%
HITACHI
RUN
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Selezione delle visualizzazioni (visualizzazione ristretta)
Questa funzione serve a limitare il numero delle visualizzazioni alle sole funzioni utilizzate.
Impostazioni
Codici
funzione
Selezione delle
visualizzazioni
Funzioni Utente
Dati
Descrizione
00
Vengono visualizzate tutte le funzioni (taratura standard)
01
Visualizzazione ristretta delle funzioni – vedi Nota 1)
02
Vengono visualizzate solo le funzioni programmate nelle tabelle Utente
assieme alla presente funzione b037 (prima è però necessario programmare le
tabelle utente U001-U012) – vedi Nota 2)
no
Nessuna funzione.
b037
U001-U0
12
b037 :Selezione visualizzazioni
U001-U012 : Selezioni utente
d001-P002
Selezionare i codici da visualizzare (ogni codice è considerato un oggetto.)
Nota 1): con b037=01 vengono visualizzate solo le funzioni effettivamente utilizzabili. Per esempio, con A001=02
(destinazione del comando di frequenza da operatore digitale) è implicito che gli ingressi analogici O, ed OI non verranno
utilizzati: pertanto tutte le funzioni in relazione a questi ingressi automaticamente non verranno visualizzate. Vedi dettagli
nella tabella qui sotto.
Nota 2) : con b037=02 verranno visualizzati solo le Funzioni Utente da U001 ad U012. Ad ogni Funzione Utente può essere
associata una funzione a scelta, per una massimo di 12 funzioni personalizzate. Vedi dettagli per la programmazione in
Appendice B.
No
Funzioni che generano
visualizzazione
ristretta
Parametri
che la modificano
(quando b037=1)
Funzioni accessibili solo con i parametri a fianco
(diversamente scompaiono dal display)i
1
A001
01
A005,A006,A011-A016,A101-A105,
A111-A114,C081-C083,C121-C123
2
A002
01,03,04,05
b087
Funzioni relative ad
ingressi analogici O,OI,O2
Abilitazione tasto di Stop
sull’operatore digitale
A028-A035
Funzioni di multi-velocità
Note
A019
00
C001-C005
02,03,04,05
4
A044,A244
02
b100-b113
Controllo V/F a impostaz. libera
5
A051
01
A052-A059
Frenatura con corrente continua
6
A071
01
A072-A076,C044
Funzione PID abilitata
3
7
A094
01
A095-A096
Modalità di passaggio
alla seconda rampa
8
b013,b213
02
b015-b020
Caratteristica termica libera
9
b021
01,02
b022,b023
Limitazione di sovraccarico
10
b024
01,02
b025,b026
2a limitazione di sovraccarico
11
b095
01,02
b090,b096
Frenatura dinamica BRD
06
A038,A039
Marcia a impulsi - Jog
08
F202,F203,A203,A204,A220,
A241-A244,A261,A262,A292-A296,
b212,b213,H202-H206,
2°controllo
11
b088
Arresto inerziale FRS
14
18
C102
Reset
16
27,28,29
C101
Funzioni Aumenta / Diminuisci
00,01
A041-A043
Funzioni di Boost
12
13
14
C001-C005
17
A044
18
A244
00,01
A241-A243
Funzioni di Boost 2° controllo
19
A097
01,02,03
A131
Profilo rampa accelerazione
20
A098
01,02,03
A132
Profilo rampa decelerazione
21
b098
01,02
b099,C085
Ingresso termistore
02,06
C042,C043
Funzioni di arrivo in frequenza
03
C040,C041
Preallarme sovraccarico
22
C021-C022,C026
23
4-62
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Fattore di stabilizzazione
H006/H206: 1o/2o fattore
Quando il motore gira in modo anomalo e presenta vibrazioni ed instabilità questa
di stabilizzazione
funzione fornisce un valido contributo alla stabilizzazione.
Verificare l’impostazione della potenza del motore (H003/H203) e verificare il numero di poli (H004/H204).
Se i dati impostati sono diversi dai dati reali del motore impostare i dati corretti.
Se il valore di R1 del motore in uso è inferiore al valore impostato di fabbrica (motore standard Hitachi) aumentare
gradualmente il valore di H006/H206.
Se si opera con un motore di potenza maggiore dell’inverter, abbassare il valore di H006/H206.
Anche le due seguenti funzioni aiutano alla stabilizzazione del motore:
(1) Abbassare la frequenza di modulazione (b083).
(2) Abbassare il guadagno della tensione di uscita (A045).
Impostazioni
Guadagno
di
tensione
Frequenza
di
modulazione
Fattore
stabilizzazione
di
Codici funzione
Dati
A045
20-100.
0.5-12.0 ( 1.5-75kW )
b083
0.5-8.0 ( 90-132kW )
H006/H206
0. -255.
Descrizione
Unità :%
Se il motore pendola abbassare questo valore
Unità :kHz
Se il motore pendola abbassare questo valore
Alzare o abbassare questo valore fino ad
annullare le pendolazioni
Selezione del modo di operare a fronte di un errore di
una scheda opzionale
Corrispondenze
P001:
Selezione modalità
errore dell’opzione 1
P002: Selezione modalità
errore dell’opzione 2
Quando una scheda opzionale causa l’intervento di una protezione questa funzione
consente di stabilire se l’errore deve arrestare l’inverter o se l’inverter può continuare
ad operare senza arrestarsi.
Impostazione
Codici
funzione
Selezione della modalità di
intervento di una protezione
di una scheda opzionale
P001/P002
Dati
Descrizione
00
TRP: l’inverter si blocca con uno specifico codice di allarme
01
RUN: l’inverter ignora l’errore e continua ad operare.
Dati del motore
Corrispondenze
Impostare i dati del motore utilizzato. Nel caso siano utilizzati più motori in parallelo,
H003/H203
adottare il valore più vicino alla somma delle potenze dei singoli motori.
Impostazioni non corrette di questi dati possono causare instabilità o coppia
insufficiente quando si utilizza la funzione di boost di coppia automatico.
4-63
:1a /2a Selezione del
motore
H004/H204
:1a /2a Selezione del
numero di poli
per
per
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
Funzioni della comunicazione seriale
A001:Destinazione
del
comando
di
frequenza
A002: Destinazione del comando di marcia
C070: Provenienza dei comandi
C071: Velocità di comunicazione
C072: Numero di stazione
C073: N° di bit per dato
C074: Parità
C075: Bit di stop
C078: Tempo attesa comunicazione
L’inverter è dotato di un’interfaccia seriale standard RS485 che
consente lo scambio di informazioni con qualunque altro
dispositivo dotato della stessa interfaccia. L’interfaccia seriale è
dotazione standard degli in verter serie L300P e può essere
utilizzata accedendo alla morsettiera TM2
(1) Specifiche della comunicazione seriale
Argomento
Velocità di trasmissione
Specifiche
2400/4800/9600/19200 bps
Note
Programmabile
con operatore digitale
Metodo di comunicazione
Metodo sincronizzazione
Codice di trasmissione
Metodo di trasmissione
Interfaccia di comunicazione
N° di bit
Metodo di comunicazione Half duplex
Trasmissione diretta di corrente
ASCII code
Trasmissione dal bit meno significativo
RS485
7/8 bit
Parità
No parity/even/odd
Programmabile
con operatore digitale
bit Stop
1/2 bit
Programmabile
con operatore digitale
Metodo di start
Tempo di attesa
Comando di start unidirezionale da
host
10-1000[ms]
N° inverter connessi
1:N (N = Massimo 32)
Controllo degli errori
Overrun / Fleming / BCC / Verticale /
Parità orizzontale
Programmabile
con operatore digitale
Programmabile
con operatore digitale
Il numero di stazione è
programmabile con
operatore digitale
<Specifiche e collegamenti della seriale RS485 >
Il collegamento della seriale si effettua tramite la morsettiera TM2
Morsettiera
di controllo
Scheda
terminali
4-64
Nome
segnale
abbreviato
SP
SN
RP
SN
Descrizione
Trasmissione e ricezione +
Trasmissione e ricezione Resistenza di terminazione
Resistenza di terminazione
Capitolo 4 Spiegazione delle funzioni
Collegare ciascun inverter in parallelo sulla linea seriale così come indicato nell’esempio. All’ultimo inverter
dovrà essere collegato il ponticello fra RP ed SNper l’inserimento della resistenza di terminazione. (la resistenza
di terminazione deve essere inclusa anche per l’utilizzo di un solo inverter).
Controllo
esterno
___
SP SN RP SN
SP SN RP SN
SP SN RP SN
(2) Impostazioni
Le seguenti impostazioni sono obbligatorie per l’utilizzo della seriale
Codici
funzione
Argomento
Impostazione
02
03
04
05
02
03
04
05
06
Provenienza dei
comandi
C070
Velocità di
trasmissione
C071
Numero di stazione
C072
1 to32
Bit
comunicazione
C073
7
8
00
01
02
1
2
di
Parità
C074
Bit di stop
C075
Tempo di attesa alla
comunicazione
C078
Descrizione
Operatore digitale
RS485
Opzione 1
Opzione 2
Test di Loop-back
2400 bps
4800 bps
9600 bps
19200 bps
Nel caso vengano utilizzati più inverter ad ogni
inverter deve essere assegnato il numero di
stazione
7 bit
8 bit
Nessuna parità
Parità
Disparità
1 bit
2 bit
Da 0 a 1000
Unità :ms
4-65
Referirsi a punto. (3)
Capitolo 4 Spiegazione delle funzioni
(3) Protocollo di comunicazione
Il metodo utilizzato per il protocollo di comunicazione è illustarto di seguito
Controllo
esterno
(1)
Inverter
C078
Temp
o
(2)
Tempo di attesa (impostabile da operatore digitale)
(1):Pacchetto dati inviato dal controllo esterno all’inverter
(2):Pacchetto dati di risposta dall’inverter al controllo esterno
Il pacchetto dati (2) è la risposta dell’inverter al pacchetto dati (1) inviato dall’unità di controllo esterna
(host).
Di seguito è riportata la lista dei comandi
Lista dei comandi
Comando
Scrittura
codici
funzione
Descrizione del comando
00
01
02
03
04
05
06
07
08
Comando di marcia Avanti/Indietro/Stop
Impostazione della frequenza
Imposta lo stato degli ingressi programmabili
Lettura dei dati di monitor
Lettura dello stato dell’inverter
Lettura della memoria degli errori
Lettura di un parametro
Impostazione di un parametro
Ritorno dei dati al valore di fabbrica
09
Controlla se il valore impostato può essere
trasferito in EEPROM
Comando di memorizzazione in EEPROM
Ricalcolo delle costanti interne
0A
0B
4-66
Note
Eseguibile solo se b084
è impostata a 01 o 02.
(Ritorno ai dati di fabbrica)
Capitolo 4 Spiegazione delle funzioni
Spiegazione di ciascun comando
( i ) Comando 00 : Invia all’inverter i comandi di marcia avanti, marcia indietro e il comando di stop (nota:
programmate la funzione A002=03 per utilizzare questo comando)
Pacchetto di trasmissione
Formato del pacchetto
STX
Codice
Comando
Dato
BCC
Spiegazione
STX
Codice
Comando
Dato
BCC
CR
Dato
0
1
2
Codice di controllo (Start TeXt)
Numero di stazione
Trasmissione del comando
Trasmissione del dato
Blocco controllo trasmissione
Codice di controllo
(“ritorno carrello”)
CR
Dimensione
del dato
2 byte
2 byte
2 byte
1 byte
2 byte
Valore
1 byte
CR (0x0D)
Descrizione
Comando di stop
Comando di marcia avanti
Comando di marcia indietro
STX (0x02)
01-32, e FF(a tutti gli inverter collegati)
00
(Note1)
OR esclusivo del Codice, Comando, Dato
Note
(Nota1
(Esempio) trasmissione del comando di marcia avanti, comando 01
(STX)|01|00|1|(BCC)|(CR)
02|30 31|30 30|31|33 30|0D
Conversione ASCII
Formato della risposta
Su risposta normale: Riferirsi a( 4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
(ii) Comando 01: Impostazione della frequenza
Pacchetto di trasmissione
Formato di trasmissione
STX
Codice
Comando
Dato
BCC
Spiegazione
CR
STX
Codice
Comando
Dato
BCC
Dimensione
del dato
1 byte
2 byte
2 byte
6 byte
2 byte
CR
1 byte
Codice di controllo (Start TeXt)
Numero di stazione
Trasmissione del comando
Trasmissione del dato
Blocco controllo trasmissione
Codice di controllo
(“ritorno carrello”)
(Nota2) Comando 01 per impostare 5Hz
Valore
STX (0x02)
01-32, e FF(a tutti gli inverter collegati)
01
(Nota2)
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
(STX)|01|01|000500|(BCC)|(CR)
Conversione ASCII
02|30 31|30 31|30 30 30 35 30 30|30 35|0D
Nota) il dato da impostare deve essere moltiplicato per 100
Esempio: 5(Hz)
500
000500
30 30 30 35 30 30
Conversione ASCII
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
4-67
Capitolo 4 Spiegazione delle funzioni
(iii) Comando 02: questo comando imposta lo stato degli ingressi programmabili.
Pacchetto di trasmissione
Formato di trasmissione
STX
Codice
Comando
Dato
BCC
Spiegazione
CR
STX
Codice
Comando
Dato
Codice di controllo (Start TeXt)
Numero di stazione
Trasmissione del comando
Trasmissione del dato
Dimensione
dato
1 byte
2 byte
2 byte
16 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice
carrello)
1 byte
di
controllo
(ritorno
Valore
STX (0x02)
01-32, e FF(a tutti gli inverter collegati )
02
(Nota3)
OR esclusivo di Codice, Comando e
Dato Riferimento (5) - - vedi pagina
4-95
CR (0x0D)
(Nota3) Dati (esadecimali) relativi agli ingressi programmabili e relativa descrizione.
(per ulteriori dettagli riferirsi alle funzioni degli ingressi programmabili.)
Dato (esadecimale)
0000000000000001
0000000000000002
0000000000000004
Descrizione
FW: comando di marcia avanti
RV: comando di marcia indietro
CF1: multi-velocità1(modo binario)
Dato (esadecimale)
0000000000100000
0000000000200000
0000000000400000
0000000000800000
0000000000000008
CF2: multi-velocità2(modo binario)
0000000000000010
CF3: multi-velocità3(modo binario)
0000000000000020
0000000000000040
0000000000000080
0000000000000100
0000000000000200
CF4: multi-velocità4(modo binario)
JG: marcia ad impulsi (Jog)
DB: comando esterno di iniezione c.c.
SET: controllo 2o motore
2CH: seconde rampe
0000000001000000
0000000008000000
0000000010000000
0000000020000000
0000000000010000
0000000000040000
FRS: arresto inerziale
EXP: allarme esterno
USP: protezione partenza indesiderata
CS: passaggio del motore a rete
SFT: blocco software(controllo esterno)
AT: selezione ingresso in
tensione/corrente
RS: ripristino
UP: Aumenta frequenza
DWN:Diminuisci frequenza
UDC: Clear memoria UP / DWN
0000000100000000
0000000200000000
0000000400000000
0000000800000000
0000001000000000
OPE: forzatura comandi
tastierino
SF1: multi-velocità(binario)
SF2: multi-velocità(binario)
SF3: multi-velocità(binario)
SF4: multi-velocità(binario)
SF5: multi-velocità(binario)
0000002000000000
SF6: multi-velocità(binario)
0000004000000000
0000008000000000
SF7: multi-speed(bit run)
OLR: abilitazione limite sovracc.
0000000080000000
0000000000000800
0000000000001000
0000000000002000
0000000000004000
0000000000008000
Descrizione
STA: start a tre fili
STP: stop a tre fili
F/R: inversione a tre fili
PID: selezione PID
(abilitato/disabilitato)
PIDC: reset accumulo errore
integrale funzione PID
Esempio) calcolo per la trasmissione dei comandi di marcia avanti, multi -velocità1 e muliti-velocità2 :
0x0000000000000001+0x0000000000000004+0x0000000000000008 = 0x000000000000000D
il pacchetto di trasmissione è il seguente
(STX)|01|02|000000000000000D|(BCC)|(CR)
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i)
- vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii)
- vedi pagina 4-75
4-68
Capitolo 4 Spiegazione delle funzioni
(iv) Comando 03: lettura collettiva dei dati di monitor
Formato del pacchetto di trasmissione:
STX
Codice
STX
Code
Comando
BCC
CR
Comando
Dato
BCC
Spiegazione
Codice di controllo
(Start of
TeXt)
Numero di stazione
Trasmissione del comando
Blocco controllo trasmissione
Codice di controllo (rit. carrello)
CR
Dimensione
Valore
1 byte
STX (0x02)
2 byte
2 byte
2 byte
1 byte
01-32
03
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
Dimensione
1 byte
2 byte
104 byte
2 byte
1 byte
Value
STX (0x02)
01-32
(Nota 4)
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
Formato pacchetto di risposta
STX
STX
Code
Dato
BCC
CR
Code
Data
BCC
CR
Spiegazione
Codice di controllo (Start TeXt)
Numero di stazione
Dato
Blocco controllo trasmissione
Codice di controllo (rit. carrello)
(Nota 4) valore di ciascun dato di monitor
Funzione di monitor
Unità
(Nota 5) monitor degli ingressi
Ingresso
Marcia avanti
1o ingresso
2o ingresso
3o ingresso
4o ingresso
5o ingresso
Codice ASCII decimale
Codice ASCII decimale
0: stop, 1: avanti, 2:indietro
Codice ASCII decimale
Nota *5)
Nota *6)
Codice ASCII decimale
Codice ASCII decimale
Codice ASCII decimale
(00000000) dati solo riempitivi
Codice ASCII decimale
Codice ASCII decimale
Byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
8 byte
Spiegazione
-
Monitor della tensione
Monitor della potenza elettrica
Tempo totale di marcia
Tempo totale di alimentazione
Hz
A
%
V
kW
h
h
Dimensione
Byte
superiore -inferiore
Frequenza di uscita
Corrente di uscita
Senso di rotazione
Monitor della retroazione PID
Stato degli ingressi
Sato delle uscite
Frequenza di uscita convertita
Fattore
di scala
x100
x10
x100
x100
x10
x10
x1
x1
(Nota 6) monitor delle uscite
Dato
00000001
00000002
00000004
00000008
00000010
00000020
Uscita
AL relè allarme
11a uscita
12a uscita
4-69
Dato
00000001
00000002
00000004
Capitolo 4 Spiegazione delle funzioni
(v) Comando 04: Lettura dello stato dell’inverter
Formato del pacchetto di trasmissione
STX
Codice
Comando
Dato
BCC
CR
Dimensione
Valore
1 byte
STX (0x02)
Code
Command
Spiegazione
Codice di controllo (Start o f
TeXt)
Num ero di stazione
Trasmissione del comando
2 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
01-32
04
OR esclusivo del Codice, Comando, Dato
Riferimento (5) – vedi pagina 4-76
CR (0x0D)
Dimensione
1 byte
Valore
STX (0x02)
2 byte
8 byte
01-32
(Nota7)
OR esclusivo del Codice, Comando, Dato
Riferimento (5) – vedi pagina 4-76
CR (0x0D)
STX
Formato del pacchetto di risposta
STX
Code
Data
BCC
CR
Codice
Dato
Spiegazione
Codice di controllo
TeXt)
Numero di stazione
Dato relativo all’allarme
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
STX
(Start
(Nota7:) Il dato indicante lo stato dell’inverter è costituito dai seguenti tre campi [A), B), C)].
Dato
Stato A
Stato B
Stato inverter A)
Codice
00
01
02
03
04
05
06
07
08
09
10
11
Stato C
Stato inverter C)
Stato
Stato iniziale
Vdc on waiting – in precarica
In stato di stop
In stato di marcia
In arresto inerziale
In marcia ad impulsi
In frenatura in c.c.
In lettura frequenza
In fase riavviamento
Bassa tensione
In allarme
In attesa di reset
Codice
00
01
02
03
04
05
06
07
08
09
10
Stato inverter B)
Codice
00
01
02
00 (riservato)
Stato
In stop
In marcia
In allarme
4-70
Stato
--Arresto
Decelerazione
Velocità costante
Accelerazione
Marcia avanti
Marcia indietro
Da indietro in avanti
Da avanti ad indietro
Marcia avanti
Marcia indietro
Capitolo 4 Spiegazione delle funzioni
(vi) Comando 05: viene letta la memoria degli allarmi
Formato del pacchetto di trasmissione
STX
Codice
STX
Codice
Comando
BCC
CR
Comando
Dato
Spiegazione
Codice di controllo(Start o f TeXt)
Numero di stazione
Trasmissione del comando
Blocco controllo trasmissione
Codice di controllo (rit.carrello)
BCC
CR
Dimensione
1 byte
2 byte
2 byte
2 byte
1 byte
Valore
STX (0x02)
01-32
05
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
Formato del pacchetto di risposta
STX
Code
Data
BCC
CR
Spiegazione
Codice di controllo(Start o f
TeXt)
Numero di stazione
Tutti i dati di monitor quando
c’è l’allarme
Blocco controllo trasmissione
Codice di controllo (rit.carrello)
STX
Code
Data
BCC
CR
Dimensione
1 byte
Valore
STX (0x02)
2 byte
440 byte
01-32
(Nota8)
2 byte
1 byte
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
(Nota 8):Memorizza gli ultimi sei allarmi con i relativi dati di monitor ed il valore d el contatore generale degli
allarmi.
Contatore degli
allarmi
- - -
Memoria degli allarmi 1
Scala
x10
x1
x10
x10
x1
Dimensioni
8byte
8byte
8byte
8byte
8byte
8byte
8byte
8byte
8byte
4-71
Note
Codice display
Riferimento
nota 7 – comando 04
Codice ASCII decimale
Codice ASCII decimale
Codice ASCII decimale
Codice ASCII decimale
Codice ASCII decimale
Inferiore
Unità
Hz
ore
A
V
ore
Superiore
Argomento
Codice di allarme
Stato inverter A)
Stato inverter B)
Stato inverter C)
Frequenza di uscita
Tempo inverter in marcia
Corrente di uscita
Tensione di allarme
Tempo inverter alimentato
Memoria degli allarmi 6
Capitolo 4 Spiegazione delle funzioni
(vii) Comando 06 : Lettura di un parametro
Formato del pacchetto
di trasmissione
STX
Codice
ACK
Dato
STX
Codice
Comando
Parametro
Spiegazione
Codice di controllo (Start of TeXt)
Numero di stazione
Trasmissione del comando
Codice del parametro
Dimensione
1 byte
2 byte
2 byte
4 byte
BCC
Blocco controllo trasmis sione
2 byte
CR
Codice di controllo (rit.carrello)
(Nota 9): parametri da leggere,
1 byte
BCC
CR
Valore
STX (0x02)
01-32
06
(Nota 9)
OR esclusivo di Codice, Comando e Dato
Riferimento (5) - vedi pagina 4-76
CR (0x0D)
F002-, A001-, b001-, C001-, H003-, P001- (F001 utilzza il comando 01)
Formato del pacchetto di risposta
STX
STX
Code
ACK
Data
Codice
ACK
Dato
BCC
Spiegazione
Codice di controllo (Start of TeXt)
Numero di stazione
Codice di controllo
(ACKnowledge)
Dato (codice ASCII decimale)
CR
Dimensione
1 byte
2 byte
1 byte
Valore
STX (0x02)
01-32
ACK (0x06) (ACK=ricevuto)
8 byte
(Nota10)
OR esclusivo di Codice, Comando e Dato
BCC
Blocco controllo trasmissione
2 byte
Riferimento (5) - vedi pagina 4-76
CR
Codice di controllo (rit.carrello)
1 byte
CR (0x0D)
(Nota10): il dato trasmesso si riferisce all’inverter indirizzato con il Numero di stazione specificato .
I dati H003, H203 (potenza motore) sono indicati secondo la tabella seguente:
Codice dato
00
01
02
03
04
05
Internal, USA mode (b085 = 00, 02) 0.2kW
0.4
0.75
EU mode (b085 = 01)
0.2kW 0.37
0.55
0.75
1.1
Codice dato
11
12
13
14
15
16
Internal, USA mode (b085 = 00, 02) 5.5kW 7.5
11
15
18.5
22
EU mode (b085 = 01)
5.5kW 7.5
11
15
18.5
22
Riferirsi alla lista codici funzione per dettagli.
06
1.5
1.5
17
30
30
07
2.2
2.2
18
37
37
08
3.0
19
45
45
09
3.7
20
55
55
In caso di risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
(viii) Comando 07: impostazione di una funzione
Formato del pacchetto
di trasmissione
STX
Codice
Spiegazione
STX
Codice di controllo (Start of TeXt)
Codice
Numero di stazione
Comando
Trasmissione del comando
Parametro Codice del parametro
Dato
Dato (codice ASCII decimale)
BCC
Blocco controllo trasmissione
CR
Codice di controllo (rit.carrello)
Formato della risposta
ACK
Dato
Dimensioni
1 byte
2 byte
2 byte
4 byte
8 byte
2 byte
1 byte
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
4-72
BCC
CR
Valore
STX (0x02)
01-32, FF (a tutti gli inverter collegati)
07
(Nota9)
(Nota10)
OR esclusivo del Codice, Comando, Dato
CR (0x0D)
10
4.0
21
75
75
Capitolo 4 Spiegazione delle funzioni
(ix) Comando 08: questo comando determina il ritorno di tutti i dati al valore iniziale (dati di fabbrica).
Il comando lavora in combinazione con (b084): se b084 =00 si ha la sola cancellazione della memoria degli
errori.
Formato del pacchetto di trasmissione:
STX
Codice
Comando
BCC
CR
STX
Codice
Comando
Spiegazione
Codice di controllo (Start o f TeXt)
Numero di stazione
Trasmissione del comando
Dimensioni
1 byte
2 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
Valore
STX (0x02)
01-32, FF (a tutti gli inverter collegati)
08
OR esclusivo del Codice, Comando, Dato
Riferimento (5) – vedi pagina 4-76
CR (0x0D)
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
(x) Comando 09: questo comando controlla se è possibile la memorizzazione del dato in EEPROM.
Formato del pacchetto di trasmissione:
STX
Codice
Comando
BCC
CR
STX
Codice
Comando
Spiegazione
Codice di controllo (Start of TeXt)
Numero di stazione
Trasmissione del comando
Dimensioni
1 byte
2 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
Valore
STX (0x02)
01-32
09
OR esclusivo del Codice, Comando, Dato
Riferimento (5) – vedi pagina 4-76
CR (0x0D)
Formato del pacchetto di trasmissione:
STX
Codice
ACK
Dato
BCC
CR
STX
Code
ACK
Dato
Spiegazione
Codice di controllo (Start of TeXt)
Numero di stazione
Codice controllo (ACKnowledge)
Data
Dimensioni
1 byte
2 byte
1 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
4-73
Valore
STX (0x02)
01-32
ACK (0x06)
Permesso con 01
OR esclusivo del Codice, Comando, Dato
Riferimento (5) – vedi pagina 4-76
CR (0x0D)
Capitolo 4 Spiegazione delle funzioni
(xi) Comando 0A : memorizza il valore impostato nella EEPROM (memoria non volatile)
Formato del pacchetto di trasmissione :
STX
Codice
Comando
BCC
CR
STX
Codice
Comando
Spiegazione
Codice di controllo (Start TeXt)
Numero di stazione
Trasmissione del comando
Dimensioni
1 byte
2 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
Valore
STX (0x02)
01-32
0A
OR esclusivo del Codice, Comando,
Dato Riferimento (5) – vedi pagina 4-76
CR (0x0D)
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
(xii) Comando 0B: ricalcolo delle costanti del motore
Questa funzione si utilizza nei casi in cui la frequenza base ed i parametri H ---- vengono variati via RS485.
Formato del pacchetto di trasmissione
STX
Codice
Comando
BCC
CR
STX
Codice
Comando
Spiegazione
Codice di controllo (Start of TeXt)
Numero di stazione
Trasmissione del comando
Dimensioni
1 byte
2 byte
2 byte
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
Formato della risposta
Su risposta normale: Riferirsi a (4) - (i) - vedi pagina 4-75
Su risposta anormale : Riferirsi a (4) - (ii) - vedi pagina 4-75
4-74
Valore
STX (0x02)
01-32
0B
OR esclusivo del Codice, Comando,
Dato Riferimento (5) – vedi pagina 4 -76
CR (0x0D)
Capitolo 4 Spiegazione delle funzioni
(4) Risposta affermativa ( ACKnowledge ) / Risposta n egativa (Negative AcKnowledge)
(i) Risposta positiva – normale – ACK:
Formato del pacchetto di risposta
STX
Codice
ACK
BCC
CR
Dimensioni
Codice
ACK
Spiegazione
Codice di controllo (Start of
TeXt)
Numero di stazione
Codice di controllo(ACKnowledge)
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
STX
1 byte
2 byte
1 byte
Valore
STX (0x02)
01-32
ACK (0x06)
OR esclusivo del Codice, Comando,
Dato Riferimento (5) – vedi pagina 4-76
CR (0x0D)
(ii) Risposta negativa – anormale – NAK:
Formato del pacchetto di risposta
STX
Codice
NAK
Codice di errore
BCC
Spiegazione
STX
Codice
NAK
Codice
errore
di
Codice di controllo (Start o f TeXt)
Numero di stazione
Codice di controllo
(Negative AcKnowledge)
Codice di errore della
comunicazione
CR
Dimension
i
1 byte
2 byte
Valore
1 byte
NAK (0x15)
2 byte
(Nota11)
OR esclusivo del Codice, Comando,
Dato Riferimento (5) – vedi pagina 4-76
CR (0x0D)
BCC
Blocco controllo trasmissione
2 byte
CR
Codice di controllo (rit.carrello)
1 byte
STX (0x02)
01-32
(Nota11) lista dei codici di errore
L’inverter non prevede una risposta per tutti i codici di comunicazione
Codice
errore
01H
02H
03H
04H
05H
06H
07H
08H
11H
12H
13H
14H
15H
16H
17H
di
Contenuti
Errore di parità
Errore di sum check (controllo della somma)
Errore di “framing”
Errore di “overrun”
Errore di protocollo
Errore di codice ASCII
Errore di “overrun” del buffer di ingresso
Errore di “time out”
Errore di comando anomalo
Errore di esecuzione comandi
Errore parametro anomalo
-
4-75
Capitolo 4 Spiegazione delle funzioni
(5) Calcolo del codice di controllo trasmissione BCC (Block Check Code)
(Esempio) a mezzo del comando 01 si imposta una frequenza di 5Hz. Assumendo che il numero di stazione sia
01.
Costituzione del pacchetto di trasmissione
Codice
STX
Comando
Dato
BCC
CR
01
Codici ASCII
(0x 02)
(0x 30 31)
01
(0x 30 31)
000500
(0x 30 30 30 35 30 30)
0
(0x 30 35)
(0x 0D)
Il BCC è il risultato della trasformazione dei codici e dei dati nel corrispondente codice ASCII sul quale viene
eseguito l’OR Esclusivo (XOR) byte per byte. Nel caso dell’esempio qui sopra si ha il seguente risultato.
30
31
Xor
01
30
31
30
30
30
35 30
30
Xor
31
Xor
00
Xor
Xor
30
00
Xor
Xor
30
05
Xor
35
Xor
0 5 ------ BCC
(Appendice) Conversione dei codici in codici ASCII
Carattere
STX
ACK
CR
NAK
0
1
2
3
4
5
6
7
8
9
Codice ASCII
02
06
0D
15
30
31
32
33
34
35
36
37
38
39
Carattere
A
b
C
D
E
F
H
P
U
4-76
Codice ASCII
41
62
43
44
45
46
48
50
55
Capitolo 4 Spiegazione delle funzioni
(6) Modalità di test della comunicazione
La modalità di test serve essenzialmente per provare la linea RS485
(Procedura di prova)
(i)
Rimuovere il cablaggio dalla morsettiera TM2 (basetta terminali) per poter esegure ilLoop Back Test.
(ii)
Sull‘operatore digitale impostare C071 (selezione velocità di trasmissione) a 02 (Loop Back Test).
(iii)
Spegnere l’inverter e ridare successivamente tensione: il controllo della seriale è cominciato.
(iv)
Al termine del controllo si possono avere le seguenti indicazioni sul display:
Normale:
Anormale :
(v)
Premere il tasto di Reset sull‘operatore digitale (o sulla Copy Unit) per ripristinare la visualizzazione.
Riportare C071 al valore di origine.
4-77
Capitolo 4 Spiegazione delle funzioni
4.4 Lista delle funzioni di protezione
4.4.1 Funzioni di protezione
Nome
Protezione di sovra-corrente
Indicazione
sull’operatore
digitale
Descrizione
Interviene nel caso in cui il motore
richieda una corrente eccessiva che
potrebbe danneggiare l’inverter. La
protezione di corrente azzera
istantaneamente l’uscita
dell’inverter.
A velocità
costante
OC. Drive
Durante la
decelerazione
OC. Decel
Durante
l’accelerazione
OC. Accel
Over. C
Altro
Errore del trasformatore di
corrente (CT)
L’inverter controlla il carico termico del motore nel caso
venga superato il valore programmato l’inverter azzera
istantaneamente l’uscita.
L’inverter controlla il carico termico della resistenza di
frenatura nel caso venga superato il valore
programmato l’inverter azzera istantaneamente l’uscita.
Quando l’energia rigenerata dal motore supera un
livello prestabilito l’inverter azzera istantaneamente
l’uscita.
L’intervento di questa protezione segnala un problema
alla memoria non volatile. Potrebbe essere dovuta alla
presenza di disturbi elettromagnetici o ad alte
temperature
di
esercizio.
L’inverter
azzera
istantaneamente l’uscita.
La bassa tensione di alimentazione potrebbe causare
un cattivo funzionamento dell’inverter.
L’inverter
azzera istantaneamente l’uscita.
Si è verificata un’anomalia nel circuito di rilevazione
della corrente. L’inverter azzera istantaneamente
l’uscita.
Errore di CPU
Un’azione errata può causare un cattivo funzionamento
della CPU. L’inverter azzera istantaneamente l’uscita.
Protezione di sovraccarico
(nota1)
Protezione della resistenza di
frenatura
Protezione di sovra-tensione
Errore di EEPROM (nota2)
Bassa tensione
Allarme esterno
Errore USP
Se utilizzata programmando opportunamente un
ingresso la protezione per allarme esterno blocca
l’inverter per cause esterne. L’inverter azzera
istantaneamente l’uscita.
Questa protezione interviene quando si alimenta
l’inverter con il comando di marcia già chiuso.
(Valida solo se la funzione USP è programmata)
Protezione guasto a massa
Durante la fase di alimentazione viene controllato
l’isolamento del motore e dell’inverter rispetto a terra.
Protezione di sovra-tensione
in ingresso
Se la tensione di ingresso supera i valori di specifica per
almeno 60 secondi si ha l’intervento della protezione.
L’inverter azzera istantaneamente l’uscita.
Quando avviene una mancanza istantanea della
tensione
per
più
di
15ms
l’inverter
azzera
istantaneamente
l’uscita.
Con
un’opportuna
programmazione
è
anche
possibile
riavviare
automaticamente l’inverter al ritorno della rete.
Trascorso il tempo di attesa al riavvio, se la tensi one di
rete non è ritornata, l’evento è trattato come una
normale mancanza rete. Fare attenzione: il riavvio
automatico può generare situazioni di pericolo.
Mancanza istantanea di rete
Display tastiera
remota/copiatore
ERR1***
Over. L
OL. BRD
Over. V
EEPROM
Under. V
CT
CPU1
EXTERNAL
USP
GND. Flt
OV. SRC
Inst. P-F
Temperatura eccessiva
Interviene quando la temperatura della parte di potenza
sale
a
livelli
eccessivi.
L’inverter
azzera
istantaneamente l’uscita.
Errore di gate arrey
Errore di comunicazione fra la CPU e il gate array
Protezione di mancanza fase
Interviene quando manca una fase
L’inverter azzera istantaneamente l’uscita.
Errore di IGBT
Interviene a fronte di una sovra -corrente istantanea che
potrebbe danneggiare l’inverter. L’inverter azzera
istantaneamente l’uscita.
IGBT
Errore termistore
Quando l’inverter misura un’eccessiva resistenza del
termistore si ha l’intervento della protezione a
salvaguardia
del
motore.
L’inverter
azzera
istantaneamente l’uscita.
TH
4-78
in
OH. FIN
GA
ingresso.
PH. Fail
Capitolo 4 Spiegazione delle funzioni
Nome
Descrizione
Indicazione
sull’operatore
digitale
Display tastiera
remota/copiatore
ERR1***
Anomalia del freno
elettromeccanico
Quando nella sequenza di gestione del freno
elettromeccanico non viene superata la corrente di
sblocco (b121/b126) o non arriva per tempo il segnale
esterno di conferma sblocco freno (b124) l’inverter
azzera istantaneamente l’uscita.
Funziona con la funzione controllo freno (b120) attiva.
Opzione 1 errore 0-9
Indica l’errore dell’opzione 1 il significato dell’errore è
riportato sul manuale dell’opzione utilizzata
-
OP1 0-9
Indica l’errore dell’opzione 2 il signif icato dell’errore è
riportato sul manuale dell’opzione utilizzata
-
OP2 0-9
Opzione 2 errore 0-9
Stato di attesa per bassa
tensione di rete
BRAKE
Quando la tensione di ingresso scende sotto i valori di
specifica l’inverter azzera istantaneamente l’uscita e si
mette in una condizi one di attesa.
UV. WAIT
(Nota 1): Dopo l’intervento della protezione di sovraccarico, attendere 10 secondi e riavviare con Reset
(Nota 2 ):Dopo un errore di EEPROM
i dati precedentemente impostati dovranno essere riconfermati.
(Nota 3): Lista delle protezioni generate dalle schede opzionali.
(1) Scheda Ingressi Digitali (SJ-DG)
Protezione
Errore di connessione
SJ-DG
Descrizione
Indicazione
sull’operatore
digitale
Rileva una connessione anomala tra l’inverter
(connettore sulla scheda logica) e l’opzione SJ-DG
Display tastiera
remota/copiatore
ERR1***
OP1-0 , OP2-0
(2) Scheda DeviceNet (SJ-DN)
Protezione
Errore di comunicazione
DeviceNet
Duplicato MACID
Descrizione
Questo errore segnala una disconnessione BusOFF o
Timeout quando l’inverter sta operando in rete
DeviceNet (l’errore è causato dalle impostazioni di
P045 e P048.
Questo errore indica che esiste già un altro componente
in rete c on lo stesso MAC -ID (indirizzo in rete
DeviceNet).
Indicazione
sull’operatore
digitale
Display tastiera
remota/copiatore
ERR1***
OP1-0
OP2-0
OP1-1
OP2-1
Blocco Esterno
Questo errore viene visualizzato quando Fault / Trip
viene settato a 1 verso il supervisore del controllo.
Riferimenti Instance 1, Attribute 17. ?
OP1-2
OP2-2
Errore di comunicazione
Inverter
Questo
errore
viene
visualizzato
quando
la
comunicazione tra l’inverter (scheda logica) e la scheda
opzionale va in Timeout.
OP1-9
OP2-9
4-79
Capitolo 4 Spiegazione delle funzioni
(Nota 4) Se l’inverter non funziona normalmente o va in blocco, controllate l’impostazione d ei Dip Switch (in
linea) o Rotary Switch (rotativi) sulla scheda opzionale.
(1) Scheda Ingressi Digitali (SJ-DG)
Rotary
switch
Dip switch
Modalità
Switch
1
Codice
Pos.
Switch
0
1
2
3
4
5
6
0
1
2
3
4
5
6
7
8
9
A
2
PACK
(pos.OFF
)
Nuovo
ingresso
BIN
su
Ingresso comando
Binario in
Strobe
pos. OFF
/
BCD
Ingresso
BCD in
pos. ON
DIV
(pos.ON)
Nuovo
divisore
su
comando
Strobe
Impostazione tempo di
accelerazione e
decelerazione
Risoluzione
Impostazione riferimento di
frequenza
0.01Hz
0.1Hz
1Hz
Rate
0.01sec
0.1sec
1sec
Set
Limite
Coppia
Set di
Posizione
1%
1
impulso
B
(2) Scheda DeviceNet (SJ-DN)
La tavola sottostante mostra come impostare il Baud rate (vista lato superiore scheda opzione)
( , indicatano la direzione in cui impostare i Dip switch ).
Baud rate
125kbps
DR
Dip switch
Setting
250kbps
500kbps
DR
ON
DR
ON
OFF
ON
OF
DR1 DR0
DR1 DR0
OFF
DR1 DR0
(Nota) Non chiudete contemporaneamente DR1 e DR0.
La tavola sottostante mostra come impostare il MAC ID (vista lato superiore scheda opzione)
MAC ID
MAC ID
1
0
NA32 NA16 NA8 NA4 NA2 NA1
Impostazione Dip switch
La figura a sinistra mostra un esempio di impostazione dei Dip switch:
Sotto=0 Sopra=1
Il peso del Bit cresce da destra a sinistra.
Nel caso della figura a lato, il valore è dato dalla formula seguente:
1•25 +0•24 +1•23 +0•22 +0•21 +1•20 =29(Hex)=41(dec)
NA32 NA16 NA8
NA4 NA2
4-80
NA1
Capitolo 4 Spiegazione delle funzioni
4.4.2 Visualizzazione degli allarmi (Codici di errore)
(1) Codice di errore, spiegazione dell’indicazione a dis play
1
2
Codice errore.
Consultare 4. 4. 1.
Visualizzazione dello stato dell’inverter in
allarme
Durante un Reset.
(2) Frequenza di allarme. (Hz)
: Durante lo Stop.
1
2
: Durante la decelerazione.
: In velocità costante.
(3) Corrente di allarme. (A)
: Durante l’accelerazione.
1
2
: Il comando operativo è dato con il
comando di frequenza
: Allo start
(4) Tensione continua di allarme. (V)
1
: Durante la frenatura in C.C.
: Durante la limitazione di sovraccarico.
2
(5) Tempo totale di lavoro (marcia) dell’inverter. (ore)
1
2
(6) Tempo di inverter alimentato (ore)
1
2
4-81
Capitolo 4 Spiegazione delle funzioni
Corrispondenze
4.4.3 Visualizzazione degli avvertimenti
d090 : monitor degli avvertimenti
Nel caso vengano impostati dei dati in contraddizione fra di loro verrà visualizzato
un messaggio di avvertimento.
La lampada (PRG) sull’operatore digitale si accende (finchè il dato non viene corretto).
La tabella seguente illustra gli avvertimenti e i loro codici.
Codici
001/ 201
002/ 202
004/ 204
005/ 205
006/ 206
012/ 212
015/ 215
016/ 216
021/ 221
025/ 225
031/ 231
032/ 232
035/ 235
036
037
085/ 285
086
091/ 291
092/ 292
095/ 295
096
110
120
Avvertimento
Limite superiore di frequenza A061/A261
Limite inferiore di frequenza A062/A262
Frequenza base A003/A203
Frequenza uscita F001, Multi-velocità 0 A020/A220
Multi-velocità 1~15 A021~A035
Limite inferiore di frequenza A062/A262
Frequenza di uscita F001, Multi-velocità 0 A020/A220
Multi-velocità 1~15 A021~A035
Limite superiore di frequenza A061/A261
Frequenza di uscita F001, Multi-velocità 0 A020/A220
Limite superiore di frequenza A061/A261
Limite inferiore di frequenza A062/A262
Frequenza uscita F001, Multi-velocità 0 A020/A220
Multi-velocità 1~15 A021~A035
Frequenza della marcia ad impulsi A038
Frequenza uscita F001, Multi-velocità 0 A020/A220
<, >
>
>
Codici di raffronto
Frequenza massima A004/A204
>
>
>
>
<
<
<
<
<
<
<
<>
Multi-velocità 1~15 A021~A035
Limite superiore di frequenza
A061/A261
Limite inferiore di frequenza
A062/A262
Frequenza di start b082
Salti di frequenza1/2/3
+- ampiezza del salto
A063+-A064
A065+-A066
A067+-A068 (nota 1)
Limite superiore di frequenza A061/A261
Limite inferiore di frequenza A062/A262
Frequenza di uscita F001, Multi-velocità 0 A020/A220
Multi-velocità 1~15 A021~A035
Frequenza1~6V/Flibero~6 b100, b102, b104, b106, b108,
b110
>
>
>
>
Frequenza2~6V/F libero ~6 b102, b104, b106, b108, b110
<
Frequenza1 V/F libero b100
Frequenza3~6V/F libero ~6 b104, b106, b108, b110
Frequenza1, 2 V/F libero b100, b102
Frequenza4~6V/F libero b106, b108, b110
Frequenza1~3V/F libero b100, b102, b104
Frequenza 5,6V/F libero b108~b110
Frequenza1~4V/F libero b100, b102, b104, b106
Frequenz 6V/F libero b110
Frequenza1~5V/F libero b100, b102, b104, b106, b108
Frequenza della caratteristica termica li bera 2, 3 b017,
b019
Frequenza della caratteristica termica libera 1 b015
Frequenza della caratteristica termica libera 3 b019
Frequenza della caratteristica termica libera 1,2b015, b017
>
<
>
<
>
<
>
<
>
Frequenza 1 della V/f libera
b100
Frequenza 2 della V/f libera
b102
Frequenza 3 della V/f libera
b104
Frequenza 4 della V/f libera
b106
Frequenza 5 della V/f libera
b108
Frequenza 6 della V/f libera b110
<
Frequenza termica 1 b015
Frequenza 7 della caratteristica
V/f libera b112
>
>
<
>
Frequenza termica 2 b017
Frequenza termica 3 b019
L’avvertimento scompare quando il dato in contraddizione viene corretto.
L’inverter aggiusta automaticamente la contraddizione variando la frequenza relativa al codice di raffronto.
(Nota 1) I salti di frequenza sono automaticamente riscritti al valore più basso (=salto di frequenza –ampiezza
del salto)
4-82
Capitolo 5 Ispezione e manutenzione
ATTENZIONE
• Le operazioni di ispezione e manutenzione vanno effettuate dopo una attesa almeno
superiore a 10 minuti dopo avere tolto la tensione in ingresso.
Diversamente, c’è pericolo di una scossa elettrica..
• Assicuratevi che solo personale qualificato possa effettuare manutenzione, ispezione
e sostituzione parti. (Prima di iniziare il lavoro, rimuovete oggetti metallici dalla vostra
persona – orologio da polso, braccialetti, etc.)
Assicuratevi inoltre di utilizzare utensili isolati.
Diversamente, c’è pericolo di una scossa elettrica e/o lesioni.
5.1 Precauzioni per la manutenzione e l’ispezione
5.1.1 Ispezione giornaliera
Giornalmente prima di utilizzare l’inverter controllare;
[1] Il motore lavora secondo la taratura definita ?
[2] C’è qualche problema nell’ambiente di installazione dell’inverter o nelle parti
meccaniche ?
[3] Il sistema di raffreddamento (ventilazione) è efficiente ?
[4] Ci sono vibrazioni o rumori anormali ?
[5] Si notano segni di eccessivo assorbimento di corrente o decolorazione dei cavi ?
[6] Ci sono degli odori anomali nelle vicinanze dell’inverter ?
Controllare la tensione con un voltmetro mentre l’inverter è in marcia
[1] la tensione di alimentazione è costante ?
[2] Le tre fasi sono bilanciate ?
5.1.2 Pulizia
Assicurarsi che l’inverter non abbia al suo interno sporcizia.
Pulire le parti esterne con uno straccio inumidito con detergente.
(Nota) Non utilizzare solventi che contengano acetone, benzene, toluene, alcool ecc.
Questi prodotti potrebbero creare la fusione delle parti plastiche e scolorimento.
Non pulire in nessun caso il Display con detergente o alcool.
5.1.3 Ispezione periodica
Si raccomanda di ispezionare regolarmente tutte quelle parti che richiedono l’arresto
dell’inverter per essere ispezionate. In particolare:
[1] C’è qualche problema al sistema di raffreddamento ? Controllare i ventilatori e pulire i
filtri.
[2] Controllare il serraggio delle viti delle morsettiere che per le vibrazioni potrebbero
allentarsi.
[3] Gli isolanti presentano corrosioni ?
[4] Misurare la resistenza di isolamento.
[5] Controllare i ventilatori, i condensatori ed i relè ed eventualmente sostituire.
5-1
Capitolo 5 Ispezione e manutenzione
5.2 Ispezione giornaliera ed ispezione periodica
Ciclo ispettivo
Componenti
da
ispezionare
Controlli
Ambiente
Sistema
Sistema
Alimentazione
Sistema
Circuito
di
potenza
Display
La temperatura deve essere
compresa fra –10 e +40 °C.
L’umidità inferiore al 90%
O
Controllo visivo
Nessuna vibrazione
La
tensione
è
in
specifica?
(1)Controllo con
megger fra circuito di
terra e circuito di
potenza
(2)Ci sono viti allentate
(3) ci sono tracce di
sovratensioni
(scariche)
(4)Pulizia
O
Misurare fra i morsetti
R,S,T
(1) Rimuovete il
connettore J51
dall’interno dell’inverter
(posto a lato dei terminali
di potenza). Rimuovete il
cablaggio sia del circuito
di potenza che dei
terminali di controllo.
Misurate l’isolamento tra i
terminali cortocircuitati
R,S,T,U,V,W, P,PD,N,RB
ed il terminale di terra.
Vedere il capitolo 5.3
“Prova con il Megger”
(2)chiave dinamometrica
(3) Controllo visivo
(1)(2) Controllo visivo
Variazioni
ammissibili
secondo specifica
(1)Superiore a 5 MOhm
(2)(3) non ammesse
anormalità
Controllo visivo
Nessuna anomalia
R i muovete le connessioni
dell’inverter e misurate la
resistenza tra i terminali
R,S,T e P,N, tra U,V,W e
P,N con tester x 1 ohm
range.
Vedi capitolo 5.5 Metodo di
controllo delle parti di
potenza.
Tester
analogico
(1),(2) Controllo visivo
(1),(2) nessuna anomalia
Tester con
funzione di
misura della
capacità.
(1) Controllo visivo
(2) Controllo visivo
(1) Nessuna anormalità
(2) Nessuna anormalità
(1)Controllare
visivamente il cemento
isolante, togliere il filo da
un lato e misurare con un
tester
(1)Nessuna anormalità
Il valore resistivo può
avere
una
tolleranza
massima del 10%
Tester o
multimetro
digitale
O
(1)Misurare la tensione
sulle fasi di uscita UVW
O
(2) Attivate e disattivate il
circuito di protezione
esterno all’inverter.
(1)
Sbi lanciamento
ammesso:
- classe 200V < 4 V
- classe 400V < 8 V
(2)
Nella sequenza di
controllo,
creare
una
anormalità.
Multimetro
digitale,
voltmetro a
ferro mobile
o con
raddrizzator
e
O
O
O
Controllo
resistenza
di potenza
Display
(operatore
digitale)
Indicatore
esterno
Sistema
generale
in
O
O
O
O
O
O
Il senso di misura è
corretto ?
O
(1) La macchina o il
motore emettono
vibrazioni o strani
rumori?
2) Ci sono odori strani?
O
(1) Eseguire la prova di
isolamento con il
Megger fra le fasi del
motore e la terra
Multimetro o
tester
Megger
di
classe
500Vc.c
(1)(2) nessuna anormalità
O
(1) Il ventilatore vibra
od è rumoroso?
(2) Ci sono dei
collegamenti incerti ?
(1) I LED sono tutti
accesi e funzionali ?
(2) Pulire
Motore
Resistenza di
isolamento
O
(2) Verifica efficienza
circuiti di protezione
Ventilatore
Termometro
igrometro
O
della
dei circuiti
(1) Ci sono perdite di
liquido ?
(2) La valvola di
espulsione gas è
aperta ? Si notano
rigonfiamenti ?
(1)Emettono rumore
durante il
funzionamento?
(2)I contatti sono
danneggiati?
(1)
L’isolamento
presenta dei cambi di
colore
o
delle
spaccature.
(2)Ci sono rotture nei
fili
(1) Verifica
bilanciamento delle
tensioni di uscita.
O
O
Le morsettiere sono
danneggiate?
Controllo della
funzionalità
Strument
i
Riferirsi al capitolo 2.1
Morsettiere
Resistenze
Metodo di valutazione
standard
O
O
Relè
Metodi di ispezione
2
Controllare la
temperatura l’umidità e
la pulizia
Ci sono vibrazioni o
rumori anomali
(1) Ci sono conduttori
ritorti e piegati in modo
anomalo ?
2) L’isolante dei cavi è
danneggiato ?
Condensatori
elettrolitici di filtro
Sistema
di
raffredda
mento
1
Collegamenti,
conduttori,
linea elettrica
Parti dell’inverter
e del convertitore
(ponte a diodi)
Cirduito di
controllo e
protezioni
Periodico
Gi
or.
Parti da
ispezionare
O
O
O
O
(1) Girare a mano la
ventola ad inverter spento
(1)Girare piano
(2) Controllo visivo
(1) La lampada indica lo
stato di marcia?.
(2) Pulire con uno
straccio
(2)Nessuna anormalità
(1)Verificare la funzionalità
dei LED
Verificare la correttezza
del valore indicato.
(1) Controllo oggettivo
della macchina azionata.
(2) Conferma della
presenza di odore di
bruciato
Prima di misurare con il
Megger, rimuovere il cavo
di collegamento fra
motore ed inverter dai
terminali U,V,W
dell’inverter.
O
O
Precisione soddisfacente.
(1)(2) Nessuna anormalità
(1) superiore a 5 MOhm
(Nota) La vita dei condensatori elettrolitici è sensibilmente legata alla temperatura ambiente.
5-2
Voltmetro,
amperometr
o.
Megger con
tensione.di
misura
500Vcc
Capitolo 5 Ispezione e manutenzione
5.3 Prova con Megger
Quando viene eseguita questa prova bisogna scollegare tutti i fili dai morsetti R, S, T, PD, P, N, RB, U, V
e W.
Non utilizzare il Megger sulla parte di controllo (usare solo multimetro digitale).
Solo sulla parte di potenza, utilizzare un Megger con tensione continua di 500V.
Corto-circuitare tra loro i morsetti R, S, T, PD, P, N, RB, U, V e W e scollegare il connettore J51.
Dopo aver eseguito la misura ricollegare il connettore J51
R
Scollegare la rete
di alimentazione
P
PD
N
RB U
S
V
T
W
J51
Motore
IM
Scollegare il motore
Megger 500Vcc
Morsetto di terra
Assicurarsi di rimuovere il connettore J51
prima di eseguire la prova con il Megger.
(J51 si trova a lato dei terminali di potenza).
5.4 Prova di tensione impressa
Si raccomanda di non eseguire questa prova sull’inverter.
L’inverter fa uso di semiconduttore di potenza che con questa prova potrebbero deteriorarsi.
5-3
Capitolo 5 Ispezione e manutenzione
5.5 metodo di controllo delle parti di potenza (modulo convertitore e
IGBT)
Questa prova serve per verificare l’integrità delle parti di potenza
(Preparazione)
[1] Scollegare la rete dai morsetti (R,S,T), scollegare il motore dai morsetti (U,V,W) scollegare la resistenza
di frenatura dai morsetti (P,RB) ;
[2] Dotarsi di tester analogico idoneo alla misura di resistenza. (utilizzare il fondo scala di 1 ohm.)
E’ possibile che nel corso della verifica si evidenzi la carica dei condensatori del filtro di continua
misurando ai terminali R, S, T, U, V, W, RB, P, N in funzione della polarità dei puntali del tester.
(Come eseguire la verifica).
Eseguire le misure seguendo la tabella sotto indicata
(Nota1) prima di eseguire le misure accertarsi che i condensatori di potenza siano scarichi (misurare fra P ed
N con un voltmetro in continua)
(Nota2) Le misure evidenziano due stati possibili :
Stato di non conduzione: valore infinito. Per effetto della carica iniziale dei condensatori di filtro, il
tester tipicamente indica un valore intermedio (indicativamente 10 Ohm) e poi una resistenza infinita.
Stato di conduzione: si misura una resistenza nell’intorno di 200 Ohm. I valori misurati non saranno
esattamente uguali per ogni terminale, ma dovranno essere ragionevolmente simili.
Se si dovessero trovare misure molto dissimili da quelle indicate il componente potrebbe essere guasto.
Poli del tester
(Rosso)
D1
Convertitore
D2
D3
D4
D5
D6
TR1
Inverter
TR2
TR3
TR4
TR5
Frenatura
TR6
TR7
(Nero)
Valore
misurato
R
PD
S
PD
T
PD
R
N
S
N
T
N
U
P
V
P
W
P
U
N
V
PD
R
PD
S
PD
T
N
R
N
S
N
T
P
U
P
V
P
W
N
U
N
Non conduce
Conduce
Non conduce
Conduce
Non conduce
Conduce
Conduce
Non conduce
Conduct
Non conduce
Conduct
Non conduce
Non conduce
Conduce
Non conduce
Conduce
Non conduce
Conduce
Conduce
Non conduce
Conduce
N
W
N
RB
P
RB
N
V
N
W
P
RB
N
RB
Non conduce
Conduce
Non conduce
Non conduce
Conduce
Non conduce
Non conduce
Convertitore
PD
P
RB
Inverter
TR1
D1
D2
TR2
TR3
D3
R
U
S
V
C
+
T
W
TR7
D4
D5
D6
TR4
N
5-4
TR5
TR6
Capitolo 5 Ispezione e manutenzione
5.6 Curva di vita dei condensatori
Temperatura A mbiente °C
50
Lavoro di 12 ore al giorno
40
30
20
Lavoro di 24 ore al giorno
10
0
-10
1
2
3
4
5
6
7
8
9
10
Vita attesa (Anni)
(Nota1)
Temperatura ambiente significa la temperatura nell’intorno dell’inverter. Nel caso l’inverter venga installato
all’interno di un quadro elettrico la temperatura ambiente è la temperatura all’interno del quadro.
(Nota2)
Si consiglia di sostituire i condensatori di potenza almeno ogni 5 anni. Nei casi di utilizzo intensivo il
periodo di sostituzione potrebbe ridursi.
5-5
Capitolo 6 Specifiche tecniche
6.1 Tavola delle specifiche tecniche
(1) Classe 200V
Modello Inverter
Potenza max motore 4 poli (kW)
200V
Potenza di ingresso
240V
kVA
Tensione di ingresso
Tensione di uscita
Corrente di uscita (A)
Modulo di frenatura
Frenatura Resistenza [Ohm]
dinamica
L300P
015LF
L300P
022LF
L300P
037LF
L300P
055LF
L300P
075LF
1.5
2.5
3.1
2.2
3.6
4.3
3.7
5.7
6.8
5.5
8.3
9.9
7.5
11.0
13.3
L300P
110LF
L300P
450LF
L300P
550LF
L300P
750LF
11
15
18.5
22
30
37
45
15.2
20.0
25.2
29.4
39.1
48.4
58.5
18.2
24.1
30.3
35.3
46.9
58.1
70.2
Trifase 200-240V(±10%)50Hz/60Hz
Trifase 200-240V (in funzione della tensione d’ingresso)
16.5
24
32
44
58
73
85
113
140
169
circuito BRD interno
Unità di frenatura esterna opzionale
35
17
17
17
17
-
7.5
10.5
35
35
L300P
015HF
L300P
022HF
L300P
037HF
L300P
055HF
L300P
075HF
L300P
110HF
1.5
2.6
3.1
2.2
3.6
4.4
3.7
5.9
7.1
5.5
8.3
9.9
7.5
11.0
13.3
11
15.2
18.2
3.8
5.3
100
100
8.6
12
16
circuito BRD interno
70
70
50
L300P
150LF
L300P
185LF
L300P
220LF
L300P
300LF
L300P
370LF
55
72.7
87.2
75
93.5
112.2
210
270
-
L300P
450HF
L300P
550HF
15
18.5
22
30
37
45
20.0
25.6
29.7
39.4
48.4
58.8
24.1
30.7
35.7
47.3
58.1
70.1
Trifase 380-480V (±10%) 50Hz/60Hz
Trifase 380-480V (in funzione della tensione d’ingresso)
22
29
37
43
57
70
85
Unità di frenatura esterna opzionale
50
50
-
55
72.7
87.2
75
93.5
112
90
111
133
105
135
160
195
230
-
-
-
-
-
L300P
550
LF/HF
L300P
750
LF/HF
L300P
900
HF
L300P
1100
HF
L300P
1320
HF
-
-
-
-
L300P
750HF
L300P
900HF
L300P
1100HF
L300P
1320HF
110
135
162
132
159
191
(2) Classe 400V
Modello Inverter
Potenza max motore 4 poli (kW)
400V
Potenza di ingresso
kVA
480V
Tensione di ingresso
Tensione di uscita
Corrente di uscita (A)
Modulo di frenatura
Frenatura Resistenza [Ohm]
dinamica
L300P
150HF
L300P
185HF
L300P
220HF
L300P
300HF
L300P
370HF
(3) Specifiche comuni per 200V/400V
L300P
015
LF/HF
Modello Inverter
Ingressi
Grado di protezione
Sistema di controllo
Campo frequenza uscita
Precisione di frequenza
Risoluzione frequenza
Caratteristica V/f
Fluttuazione di velocità
Rapporto di sovraccarico
Tempo di acc./dec.
Frenatura in c.c.
Fre
Operatore dig.
quenz Potenziometro
a
Segnale esterno
Operatore dig.
Mar
cia/
Contatto esterno
Stop
Segnale esterno
Ingressi programmabili
Uscite
Ingresso termistore
Uscite programmabili
Uscite analogiche
Visualizzazioni
Altre funzioni
Frequenza di modulazione
Ambiente
Funzioni protettive
L300P
022
LF/HF
L300P
037
LF/HF
L300P
075
LF/HF
L300P
110
LF/HF
L300P
150
LF/HF
L300P
185
LF/HF
L300P
300
LF/HF
L300P
370
LF/HF
L300P
450
LF/HF
IP00
120% per 60 secondi, 150% per 0.5 secondi
0.01 - 3600.0 secondi (Profilo lineare/ad esse programmabili in modo indipendente),
Iniezione di corrente continua alla partenza / all’arresto su comando esterno o al raggiungimento di una freq. stabilita (intensità, durata, e frequenza programmabili
Impostabile con i tasti
DC da 0 a 10V, -10 a +10V (Impedenza di ingresso10k ohm), 4-20mA (impedenza di ingresso 100 ohm)
Comunicazione seriale RS 485
Marcia/Stop
Marcia avanti/Stop (1a connect), e marcia indietro con un conatto pulito o con circuito atre fili
Comunicazione seriale RS 485
Funzioni associabili agli ingressi;
Marcia indietro(RV), multi- velocità1-4 (CF1-CF4), marcia ad impulsi(JG), C.do esterno frenatura(DB), 2o controllo (SET),2a accelerazione (2CH), arresto inerziale(FRS),
allarme esterno(EXT), Funzione USP (USP), motore su rete(CS), blocco software (SFT), Ingresso analogico Tensione/corrente (AT), reset (RS), marcia con tre fili
(STA), stop tre fili (STP), senso di marcia tre fili (F/R), Abilitazione PID (PID), reset integrale PID (PIDC), controllo motopotenziometro (UP), (DWN), reset memoria
motopotenziometro(UDC), Forzatura c.do di marcia(OPE), multi-velocità bit 1-7(SF1-SF7), restrizione di sovraccarico (OLR), non assegnato(NO) .
Un ingresso dedicato
Inverter in marcia (RUN), Arrivo in frequenza1(FA1), Arrivo in frequenza 2 (FA2), preavviso di sovraccarico (OL), errore sovradeviazione PID (OD), Allarme (AL),
Segnale di arrivo in frequenza 3(FA3), ,Mancanza istantanea di rete (IP),Bassa tensione (UV), tempo di marcia superiore a tempo programmato (RNT), tempo di power
On superato (ONT), protezione termica (THM).
Uscita analogica di tensione, uscita analogica di corrente, uscita PWM
Frequenza e corrente di uscita, frequenza convertita, memoria degli allarmi , stato degli I/O, potenza elettrica di ingresso, tensione di uscita.
V/f libero(7punti), limiti di frequenza inferiore/superiore, salti di frequenza, profili delle rampe, Boost di coppia in manuale/punto di frenatura, taraturastrumento
analogico, frequenza di start , frequenza di modulazione, impostazione libera della caratteristica termica, limiti di frequenza su segnale esterno
(frequenza/percentuale), selezione ingresso analogico, ripartenza dopo allarme, avviamento a tensione ridotta, limite di sovraccarico,risparmioenergetico,ripartenza
dopo una mancanza istantanea di tensione, altre uscite, ritorno ai dati di fabbrica, funzione AVR.
0.5 - 12kHz
0.5 - 8kHz
Sovra-corrente, sovra-tensione, bassa tensione, livello di protezione termica, anomalia CPU, protezione guasto a massa (rilevato al power ON), arresto immediato,
error e USP, mancanza di una fase, protezione della resistenza di frenatura, error e CT, allarme esterno, errore di comunicazione.
Temperatura di lavoro /
immagazzinaggio /
umidità
Da -10 a 40°C /da -20 a 65 °C / da 20 a 90 % RH (senza condensa)
5.9 m/s2 (0.6G), 10-55Hz
2.94 m/s2 (0.3G), 10-55Hz
Non oltre 1,000 m s.l.m., installazione in ambiente coperto senza gas corrosivi e sporcizia
Viola-Blu (D.I. C14 version N° 436)
Grigio (Munsell 8.5YR 6.2/0.2)
Vibrazioni
Locazione
Opzioni
Profibus, Device-Net
Opzione ingressi digitali
Altre opzioni
Peso indicativo
(kg)
L300P
220
LF/HF
IP20 (NEMA1)
PWM ad onda sinusoidale
0.1-400Hz
Comando digitale +/-0.01% della frequ.max., Con impostazione analogica +/-0.2%(25+-10°C)
Comando digitale : 0.01Hz,Impostazione analogica: Frequenza massima/4000
V/f a programmazione libera , controllo V/f, (Coppia costante, coppia variabile ) - Frequenza base regolabile 30-400Hz
Colore
Op
zioi
L300P
055
LF/HF
classe 200V
classe 400V
4 colonne BCD/16bit binary
Operatore remoto, copiatore, cavi di collegamento tastiere remote, resistenza di frenatura, Brake unit, Induttanza AC, Filtro EMC.
3.5
3.5
3.5
3.5
3.5
3.5
3.5
3.5
5
5
5
5
5
5
6- 1
12
12
12
12
12
12
20
20
30
30
30
30
50
30
60
60
80
Capitolo 6 Specifiche tecniche
6.2 Dimensioni
L300P-015-055LF/HF
L300P-075-150LF/HF
6- 2
Capitolo 6 Specifiche tecniche
L300P-185-300LF/HF
L300P-370LF/HF
6- 3
Capitolo 6 Specifiche tecniche
L300P-450-550LF/HF
L300P-750HF
L300P-750LF
6- 4
Capitolo 6 Specifiche tecniche
L300P-900, 1100HF
L300P-1320HF
6- 5
Appendice A – Impostazione parametri dell’utente
Modo funzione
Impostazioni
basilari
Codice
Nome della funzione
Iimpostazione ingressi
Analogici
Dati iniziali
-FE/-FU/-FR
A001
Destinazione del rif. di frq.
00(VR)/01(esterno)/02(oper.digit.)/03(RS485)/04(opzione1)/05(opz.2)
A002
Destinazione del c.do di marcia
01(esterno)/02(oper.digitale)/03(RS485)/04(opzione1)/05(opzione2)
01/01/02
A003
Frequenza base
30. – Massima Frequenza (Hz)
50./ 60/ 60.
“
30. – 2a Massima Frequenza (Hz)
50./ 60/ 60.
30. - 400. (Hz)
50./ 60/ 60.
30. - 400. (Hz)
50./ 60/ 60.
A203
A004
A005
A006
A011
per secondo motore
Frequenza massima
A204
Multi-velocità -Frequenza della marcia ad impulsi
Campo di impostazione
“
per secondo motore
00 (Commutazione di O ed OI con l’ingresso AT )/
Funzione ingresso AT
01(Commutazione di O ed O2 con l’ingresso AT )
00(singolo)/01(Ingresso di somma con O, OI) [non invertente] /
Funzione ingresso ana. O2
02(velocità ausiliaria di O, OI [invertente]
01/01/00
00
00
Frequenza di start ingresso O
0.00-99.99/100.0-400.0 (Hz)
0.00
A012
Frequenza di end ingersso O
0.00-99.99/100.0-400.0 (Hz)
0.00
A013
% riferimento di start ingresso O
0.-100.0 (%)
0.
A014
% riferimento di end ingresso O
0.-100.0(%)
100.
A015
selezione frequenza di start ing. O
00 (frequenza di start dall’esterno)/01(0Hz)
01
A016
Campionamento per O, OI, O2
A019
Selezione delle multi-velocità
A020
Multi-velocità 0
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A220
Multi-velocità 0 per 2° motore
0.00, dalla frequenza di start alla 2a massima frequenza (Hz)
0.00
A320
Multi-velocità 0 per 3° motore
0.00, dalla frequenza di start alla 3a massima frequenza (Hz)
0.00
A021
Multi-velocita1
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A022
Multi-velocita2
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A023
Multi-velocita3
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A024
Multi-velocita4
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A025
Multi-velocita5
0.00,dalla frequenza di start alla massima frequenza (Hz)
0.00
A026
Multi-velocita6
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A027
Multi-velocita7
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A028
Multi-velocitad8
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A029
Multi-velocitad9
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A030
Multi-velocitad10
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A031
Multi-velocitad11
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A032
Multi-velocitad12
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A033
Multi-velocitad13
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A034
Multi-velocitad14
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A035
Multi-velocitad15
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
A038
Freq. Marcia ad impulsi
0.00, dalla frequenza di start a 9.99(Hz)
1.00
1.-30.(volte)
00 (binario:fino a 16 multi-velocità con 4 ingressi)/
01 (un bit = un terminale) : fino a 8 multi-velocità con 7 ingressi)
8.
00
00(arresto Jog inerziale/non attivo in marcia) / 01(arresto jog con
A039
rampa/non attivo in marcia) / 02(arresto Jog con iniezione c.c./non attivo
Selezione delle funzionalità della
in marcia) / 03(arresto Jog inerziale/valido anche in marcia – Jog
disponibile dopo la decelerazione e l’arresto) / 04 (arresto Jog con
marcia ad impulsi (Jog)
00
rampa/valido in marcia) / 05 (iniezione c.c/valido in marcia)
A041
Selez.modalità Boost di coppia
A241
Frenatura in corrente continua
Caratteristiche V/F
A042
A242
A043
A243
A044
“
00 (Boost di coppia manuale) / 01 (Boost di coppia automatico)
2° motore
Boost di coppia manuale
“
Punto lavoro
manuale
“
2° motore
coppia
di
2° motore
Primo sistema di controllo
boost
00
00 (Boost di coppia manuale) / 01 Boost di coppia automatico)
00
0.0-20.0(%)
1.0
0.0-20.0(%)
1.0
0.0-50.0(%)
5.0
0.0-50.0(%)
5.0
00/(VC) / 01(VP elevato a 1,7) / 02(curva V/f programmabile) /
00/(VC) / 01(VP elevato a 1,7) / 02 (curva V/f programmabile) /
00 /01 /00
A244
Secondo sistema di controllo
A045
Guadagno tensione di uscita
A051
Selezione iniezione c.c.
00(disabilitata)/01(abilitata)
00
A052
Frequenza iniezione c.c.
0.00-60.00(Hz)
0.50
A053
Tempo di attesa all’iniezione c.c.
0.0 - 5.0(s)
0.0
A054
Intensità dell’iniezione c.c.
0. - 100. (%)
0.
A055
Tempo di iniezione c.c.
0.0 - 60.0(s)
0.0
A056
Selez. Fronte/livello per iniezione
00(agisce sul fronte)/01(agisce sul livello)
01
A057
Intensità iniezione c.c. allo start
0. - 100. (%)
0.
A058
Tempo iniezione c.c. allo start
0.00-60.0(s)
0.0
A059
Freq. di modulazione iniez. c.c.
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
3.0
20. - 100.
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
A- 1
00 /01 /00
100.
Impostazioni dell’Utente
Appendice A – Impostazione parametri dell’utente
Modo Funzione
Controllo PID
Limiti superiore ed inferiore e salti di
frequenza
Codice
Nome della funzione
Campo di impostazione
°
o
Dati iniziali
-FE/-FU/-FR
A061
1 limite superiore di frequenza
0.00, oppure dal 1 limite inferiore di freq. alla Frequenza massima (Hz)
0.00
A261
2o limite superiore di frequenza
0.00, oppure dal 2° limite inferiore di freq. alla Frequenza massima (Hz)
0.00
A062
1o limite inferiore di frequenza
0.00, dalla frequenza di start al 1° limite superiore di frequenza (Hz)
0.00
A262
2o limite inferiore di frequenza
0.00, dalla frequenza di start al 2° limite superiore di frequenza (Hz)
0.00
A063
Salto di frequenza1
0.00-99.99/100.0-400.0(Hz)
0.00
A064
Ampiezza salto di frequenza 1
0.00-10.00(Hz)
0.50
A065
Salto di frequenza2
0.00-99.99/100.0-400.0(Hz)
0.00
A066
Ampiezza salto di frequenza 2
0.00-10.00(Hz)
0.50
A067
Salto di frequenza3
0.00-99.99/100.0-400.0(Hz)
0.00
A068
Ampiezza salto di frequenza 3
0.00-10.00(Hz)
0.50
0.00-99.99/100.0-400.0(Hz)
0.00
0.00-60.0(s)
0.0
A069
Frequenza
di
stop
prima
dell’acc.
A070
Durata della frequenza di stop
A071
Abilitazione del PID
A072
Guadagno proporzionale PID-P
A073
Guadagno integrale PID-I
0.0-3600.(s)
1.0
A074
Guadagno differenziale PID-D
0.00-100.0(s)
0.00
0.01-99.99(%)
1.00
00(Disabilitato)/01(abilitato)
00
0.2-5.0
1.0
A075
Fattore di scala del PID
A076
Selezione ingresso retroazione
00(retroazione : OI)/01(retroazione: O)
00
A081
Selezione della funzione AVR
00 (ON sempre) / 01 (OFF sempre) / 02 (OFF solo in decelerazione)
00/ 00/ 02
A082
Selezione della tensione motore
A085
Modalità di lavoro dell’inverter
AVR
(230/400)/
200/215/220/230/240, 380/400/415/440/460/480
(230/460)
(200/400)
A086
A092
Risposta del risparmio
energetico.Taratura precisione
Tempo di accelerazione2
A292
Modi operativi e funzioni di taratura
A093
( 2o m o t o re )
“
Tempo di decelerazione2
( 2o m o t o re )
00(normale)/01(risparmio energetico)/02(Fuzzy)
00
0.0-100.0(s)
50.0
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
A293
“
A094
Modalità di utilizzo 2a rampa
00(cambia coningresso 2CH )/01(cambia ad una frequenza impostata)
00
A294
Modalità di utilizzo 2a rampa
(per il 2° motore)
00(cambia coningresso 2CH )/01(cambia ad una frequenza impostata)
00
0.00-99.99/100.0-400.0(Hz)
0.00
0.00-99.99/100.0-400.0(Hz)
0.00
0.00-99.99/100.0-400.0(Hz)
0.00
0.00-99.99/100.0-400.0(Hz)
0.00
00
A095
Frequenza di cambio con 2°
rampa di accelerazione
2° Frequenza di cambio con 2°
A295
A096
A296
rampa di accelerazione (2o
motore)
Frequenza di cambio con 2°
rampa di decelerazione
2° Frequenza di cambio con 2°
rampa di decelerazione (2o
Taratura dei limiti di frequenza esterni
motore)
A097
Scelta profilo rampa di accel.
00(lineare)/01(Curva ad “ S ”)/02(Curva ad “ U ” ) / 0 3 (Curva ad “U” rovesciata )
A098
Scelta profilo rampa di decel.
00(lineare)/01(Curva ad “ S ”)/02(Curva ad “ U ” ) / 0 3 (Curva ad “U” rovesciata )
00
A101
Frequenza di start ingresso OI
0.00-99.99/100.0-400.0(Hz)
0.00
A102
Frequenza di end ingresso OI
0.00-99.99/100.0-400.0(Hz)
A103
OI start rate
0.-100. (%)
20.
A104
% riferimento di end ingresso OI
0.-100. (%)
100.
Accel,
Dece
A105
% riferimento di start
ingresso
0. 00 / 60.00/
0.00
00(Frequenza esterna di start)/01(0Hz)
01
A111
Frequenza di start ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
A112
Frequenza di end ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
A113
%riferimento di start
O2
ingresso
-100. - 100. (%)
-100.
A114
% riferimento di end
O2
ingresso
-100. - 100. (%)
100.
A131
Curvatura della curva di accel.
01(piccola curvatura)-10(grande bombatura)
02
A132
Curvatura della curva di decel.
01(piccola curvatura)-10(grande bombatura)
02
OI
Ripartenza su mancanza istant. rete
00(Allarme)/01(Start da 0Hz )/02(start dalla frequenza a cui è il motore)/
b001
Selezione ripartenza automatica
b002
Tempo massimo consentito di
bassa tensione
0.3-1.0(s)
1.0
b003
Tempo di attesa alla ripartenza
0.3-100.(s)
1.0
Mancanza istantanea di rete/
b004
b005
Allarme
stop
03(start alla frequenza a cui è il motore-seguente decelerazione ed
allarme)
00
00(disabilitata)/01(abilitata)
bassa tensione allo
Mancanza istantanea rete/
Selezione ripartenza x bassa
02(disabilitata durante l’arresto e la decelerazione dopo un comando di
arresto)
00
00(16 volte)/01(libero)
00
00(disabilitata)/01(abilitata)
00
0.00-99.99/100.0-400.0(Hz)
0.00
tensione
b006
b007
Selezione protezione di
mancanza fase
Impostazione
aggancio
frequenza
di
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
A- 2
Impostazioni dell’Utente
Appendice A – Impostazione parametri dell’utente
Modo funzione
Protezione termica del motore
Codice
b012
Livello della protezione
termica
b212
Livello
della
protezione
termica (2o motore)
b013
b213
b015
b016
b017
b018
b019
Limitazione di sovraccarico
b020
Selezione 1a caratteristica
termica elettronica
Selezione 2a caratteristica
termica elettronica
Frequenza 1 della
caratteristica termica libera
Corrente 1 della
caratteristica termica libera
Frequenza 2 della
caratteristica termica libera
Corrente 2 della
caratteristica termica libera
Frequenza 3 della
caratteristica termica libera
Corrente 3 della
caratteristica termica libera
Campo di impostazione
Da 20% al 120% della corrente nominale(A)
Da 20% al 120% della corrente nominale(A)
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
Dati iniziali
-FE/-FU/-FR
Corrente
nominale
inverter
Corrente
nominale
inverter
01/ 00/ 00
01/ 00/ 00
0.-400.(Hz)
0.
0.0-1000.(A)
0.0
0.-400.(Hz)
0.
0.0-1000. (A)
0.0
0.-400.(Hz)
0.
0.0-1000.(A)
0.0
b021
Selezione delle modalità di
sovraccarico
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante) / 03(abilitato in accelerazione / velocità
costante (aumento di velocità nel modo rigenerativo))/
01
b022
Regolazione del livello del
limite di sovraccarico
Dal 50 % al 150% della corrente nominale inverter (A)
b023
b024
Impostazione del percorso V/f
libero
Impostazioni degli ingressi programmabili
Nome della funzione
Costante di tempo della
limitazione di corrente
Selezione delle modalità di
sovraccarico 2
b025
Regolazione del livello del
limite di sovraccarico 2
b026
Costante di tempo della
limitazione di corrente 2
b031
Selezione delle modalità del
blocco software alla
programmazione
b100
b101
b102
b103
b104
b105
b106
b107
b108
b109
b110
b111
b112
b113
V/f libero frequenza1
V/f libero tensione1
V/f libero frequenza2
V/f libero tensione2
V/f libero frequenza3
V/f libero tensione3
V/f libero frequenza4
V/f libero tensione4
V/f libero frequenza5
V/f libero tensione5
V/f libero frequenza6
V/f libero tensione6
V/f libero frequenza7
V/f libero tensione7
C001
Ingresso programmabile1
C002
Ingresso programmabile2
C003
Ingresso programmabile3
C004
Ingresso programmabile4
C005
Ingresso programmabile5
0.10-30.00(s)
I nominale
x1.20 /
x1.10 /
x1.20
1.00/
15.00/ 1.00
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante)
01
Dal 50 % al 150% della corrente nominale inverter (A)
I nominale
inverter
x 1.20
0.10-30.00(s)
1.00
00 (impossibile cambiare alcun dato, eccetto questo, quando il terminale SFT è
ON) / 01(impossibile cambiare alcun dato, eccetto la frequenza impostata,
quando il terminale SFT è ON) / 02 (Impossibile cambiare alcun dato eccetto
questo) / 03 (Impossibile cambiare alcun dato eccetto l’impostazione di
frequenza ) / 10( possibile cambiare alcuni dati durante la marcia)
Da 0 al valore V/f della frequenza 2 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 3 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 4 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 5 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 6 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 7 (Hz)
0.-800.0(V)
0.-400.(Hz)
0.-800.0(V)
01 (RV:indietro abilitato) / 02 (CF1:Multivelocità1) / 03 (CF2: Multivelocità2) /
04 (CF3: Multivelocità3) / 05 (CF4: Multivelocità4) / 06 (JG:Jogging)/
07 (DB:Frenatura esterna in c.c ) / 08 (SET: 2o settaggio dei parametri /
09 (2CH:c.do seconda rampa) / 11 (FRS: arresto inerziale) / 12 (EXT:Allarme
esterno)/
13 (USP:Prevenzione alle ripartenze non volute) / 14 (CS:commutazione del
motore su rete) /15 (SFT:blocco software) / 16 (AT: Selezione ingresso
analogico in tens. / corr.) /
18( R S : ripristino allarmi) / 20 (STA:marcia a 3 flili) / 21 (STP:a tre fili ) / 22 (F/R:
avanti indietro a 3 fili) / 23 (PID:abilitazione/disabilitazione PID) / 24
(PIDC:reset dell’errore integrale del PID) / 27(UP:aumenta da remoto) / 28
(DWN:diminuisci da remoto) /
29 (UDC:cancellazione set frequenza UP/DOWN con controllo remoto) /
31(OPE: forzatura comandi su operatore digitale) / 3 2 ( S F 1 : M u l t i -velocità bit1)
/
33 (SF2: Multi-velocità bit2) / 34 (SF3: Multi-velocità bit3) / 35 (SF4:
Multi-velocità bit4) /
36 (SF5: Multi-velocità bit5) / 37 (SF6: Multi-velocità bit6) / 38 (SF7:
Multi-velocità bit7)/
39 (OLR:cambio del limite di sovraccarico) / no( nessuna funzione)
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
A- 3
01
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
18
16
03/13/03
02
01
Impostazioni dell’Utente
Appendice A – Impostazione parametri dell’utente
Modo funzione
Codici
Nome della funzione
Campo di impostazione
Dati iniziali
-FE/-FU/-FR
Impostazione degli
ingressi programmabili
C011
C012
C013
C014
C015
Offset e tarature degli
ingressi/uscite analogiche
Parametri della
comunicazione
Impostazioni uscite ?
Impostazione delle soglie
Impostazione delle uscite programmabili
C019
Ingresso1 selezione a/b
(NA/NC)
Ingresso2 selezione a/b
(NA/NC)
Ingresso3 selezione a/b
(NA/NC)
Ingresso4 selezione a/b
(NA/NC)
Ingresso5 selezione a/b
(NA/NC)
Ingresso FW selezione a/b
(NA/NC)
NA= Normalmente Aperto
00(NA)/01(NC)
00
00(NA)/01(NC)
00
00(NA)/01(NC)
00/ 01/ 00
00(NA)/01(NC)
00
00(NA)/01(NC)
00
00(NA)/01(NC)
00
00 (RUN:Inv. In marcia ) / 0 1 (FA1:Uscita di arrivo in frequenza modalità FA 1 )
/
02( FA2: Uscita di arrivo in frequenza modalità FA2) /
03 (OL:preallarme sovraccarico) /
04 (OD:errore eccessivo controllo PID) / 05(AL:Uscita di allarme) /
06 (FA3: set point di frequenza raggiunto) / 08(IP:Arresto temporaneo per
mancanza rete) / 09(UV: bassa tensione di alimentazione) / 11(RNT: t e m p o d i
inverter RUN scaduto / 12(ONT:tempo di inverter ON scaduto) /
13 (THM: preallarme protezione termica)
C021
Impostazione dell’uscita 11
C022
Impostazione dell’uscita 12
C026
Relè di allarme inverter
C027
Selezione uscita FM
C028
Selezione
AM
uscita
analogica
C029
Sel ezione
AMI
uscita
analogica
C031
Selez. Uscita 11 a/b (NA/NC)
00(NA)/01(NC)
00
C032
Selez. Uscita 12 a/b (NA/NC)
00(NA)/01(NC)
00
C036
Sel. Relè allarme a/b (NA/NC)
00(NA)/01(NC)
01
C040
Selezione Uscita di
avvertimento di sovraccarico
00(ON durante accel.,decel.e velocità costante)/01(Solo a velocità costante)
01
C041
Impostazione del livello di
avvertimento di sovraccarico
Da 0.0 al 200% della corrente nominale(A)
Corrente
nominale
inv.
C042
Impostazione del segnale di
arrivo in frequenza in accel.
0.00-99.99/100.0-400.0(Hz)
0.00
C043
Impostazione del segnale di
arrivo in frequenza in decel.
0.00-99.99/100.0-400.0(Hz)
0.00
C044
Livello di scostamento PID
0.0-100.0(%)
3.0
C061
Impostazione livello
avvertimento termico
0.0-100.0(%)
80.0%
C070
Provenienza
command
02(operatore digitale)/03(RS485)/04(opzione1)/05(opzione2)
02
C071
Velocità di comunicazione
02(test della comunicazione seriale “loop-back test”)
03(2400bps)/04(4800bps)/05(9600bps)/06(19200bps)
04
C072
Codice di comunicazione
1. -32.
1.
C073
Bit/Carattere
C074
Parità
C075
Bit di stop
C078
Tempo attesa comunicazione
C081
Taratura ingresso “O”
0.-9999./1000-6553(10000-65530)
C082
Taratura ingresso “OI”
0.-9999./1000-6553(10000-65530)
C083
Taratura ingresso “O2”
0.-9999./1000-6553(10000-65530)
C085
Taratura ingresso termistore
C086
Taratura offset uscita AM
C087
Taratura uscita AMI
C088
Taratura offset uscita AMI
dati
Data
00 (Frequenza di uscita) / 01 (Corrente di uscita) / 03 (uscita di frequenza
digitale) / 04(Tensione di uscita) / 05 (Potenza di ingresso) / 0 6 (% di carico
termico) / 07(frequenza in limitazione LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 05(Potenza in ingresso) / 06(% di carico termico) /
07(frequenza in limitazione LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 05(Potenza in ingresso) / 06(% di carico termico) /
07(frequenza in limitazione LAD)
01
00
05
00
00
00
7(7bit)/8(8bit)
7
00(no parità)/01(parità/02(disparità)
00
1(bit)/2(bit)
1
0.-1000.(ms)
0.
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
0.0 - 1000.
105.0
0.0 - 10.0(V)
0.0
0. - 255.
50
0. - 20.0(mA)
Tarato in
fabbrica
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
A- 4
Impostazioni dell’Utente
Appendice A – Impostazione parametri dell’utente
Modo Funzione
Codici
0.-9999./1000-6553(10000-65530) ore
0.
b035
Disabilitazione senso marcia
00(avanti e indietro abilitati)/01(solo marcia avanti)/02(solo indietro)
00
b036
Tensione ri dotta all’avviamento
00(tempo di tensione ridotta breve)-06(tempo di tensione ridotta lungo)
06
00(tutto) / 01(ogni funzione) / 02 (Impostazioni utente / Impostazioni
principali)
00
0. - 255.
180
b037
Selezione visualizzazione
b080
Taratura uscita AM
b081
Taratura uscita FM
0. - 255.
60
b082
Frequenza di start
0.10-9.99(Hz)
0.50
b083
Frequenza di modulazione
b084
Inizializzazione
b085
b091
Codice della Nazione
Fattore di conversione della
frequenza per funzione d007
Tasto di STOP abilitato
Modalità di riavvio dopo FRS
Rapporto di utilizzo frenatura
dinamica BRD
Selezione modalità di stop
b092
Controllo ventilatori inverter
b095
Selezione della funzione BRD
b096
b098
b099
Livello di intervento della BRD
Selezione termistore
Livello di errore del termistore
Impostazione livello di
avvertimento termico
Selezione del modo Debug
Modalità di funzionamento del
comando aumenta/diminuisci
b090
Altre funzioni
Dati iniziali
-FE/-FU/-FR
b034
b087
b088
C061
C091
C101
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
3.0
00(Cancellazione memoria allarmi)/01(Inizializzazione dati)/
02(Cancellazione memoria allarmi + Inizializzazione dati)
00(Interno)/01(Europeo)/02(Ameri cano)
01/ 02/ 00
0.1-99.9
1.0
00
00
0.0-100.0(%)
0.0
00(si arresta con decelerazione)/01(Si arresta per inerzia)
00(sempre attivi)/01(attivi in marcia dopo aver alimentato, si arresta dopo
5 minuti dall’arresto del motore.)
00(disabilitata)/01(abilitata<disabilitata durante lo stop>)/02(abilitata
durante lo stop >)
330-380 / 660-760(V)
00(disabilitato)/01(PTC abilitato)/02 (NTC abilitato)
0. – 9999. (ohm)
00
360/720
00
3000.
80
00
01(non mantiene) / 00(mantiene l’ultimo valore di frequenza)
00
Modalità comando di di reset
Aggancio al volo dopo reset
C121
Taratura di “zero” ingresso O
0.-9999./1000-6553(10000-65530)
C122
Taratura di “zero” ingresso OI
0.-9999./1000-6553(10000-65530)
C123
Taratura di “zero” ingresso O2
0.-9999./1000-6553(10000-65530)
0.20-75.0(kW) <0.2-160kW>
Numero poli 1o motore
Numero poli 2o motore
K stabilizzazione1o motore
K stabilizzazione2o motore
Comportamento opzione 1 su
errore
Comportamento opzione 2 su
errore
Selezione modalità opzione
ingressi digitali (Acc/Dec)
Impostazione posizione di Stop
con scheda opzionale SJ-DG
(in modalità orientamento).
Impostazione tempo di Timeout
con comunicazione DeviceNet
Comportamento dell’inverter in
caso di errore di comunicazione.
Output Instance Number definisce il formato delle uscite.
Input Instance Number definisce il formato degli
ingressi
Comportamento dell’inverter in
caso di “Idle mode”.
Numero poli motore - per
comando velocità motore.
P001
P002
P031
P032
P044
P045
P046
P047
P048
P049
2/4/6/8(poli)
2/4/6/8(poli)
0. - 255.
0. - 255.
0.20-75.0(kW) <0.2-160kW>
o
Potenza nominale 2 motore
00
00
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
4
4
100.
100.
o
H004
H204
H006
H206
00
0-100 (%)
C103
H203
00
00(No attivo)/01(attivo)
C102
Potenza nominale 1 motore
00
00(abilitato)/01(disabilitato)
00(riavvio da 0Hz) / 01(aggancio a frequenza motore)
00(sul fronte di salita) / 01(sul fronte di discesa)/
02(sul fronte di salita, attivo solo in caso di blocco)
00(riavvio da 0Hz) / 01(Riavvio con aggancio al volo)
H003
Opzioni
Campo di impostazione
Tempo di inverter in marcia /
Tempo di inverter alimentato
b086
Tabella utente
Nome della funzione
00(Allarme)/01(Marcia)
00
00(Allarme) / 01(Marcia)
00
00(Modo 0)/01(Modo 1)/02(Modo 2)
00
00 (operatore digitale) / 01 (opzione1) / 02 (opzione 2)
00
0.00-99.99s
1.00
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
20, 21, 100
21
70, 71, 101
71
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
0-38 (possibile impostare solo numeri pari)
0
U001
Selezione Utente 1
no/d001-P002
no
U002
Selezione Utente 2
no/d001-P002
no
U003
Selezione Utente 3
no/d001-P002
no
U004
Selezione Utente 4
no/d001-P002
no
U005
Selezione Utente 5
no/d001-P002
no
U006
Selezione Utente 6
no/d001-P002
no
U007
Selezione Utente 7
no/d001-P002
no
U008
Selezione Utente 8
no/d001-P002
no
U009
Selezione Utente 9
no/d001-P002
no
U010
Selezione Utente 10
no/d001-P002
no
U011
Selezione Utente 11
no/d001-P002
no
U012
Selezione Utente 12
no/d001-P002
no
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
A- 5
Impostazioni dell’Utente
Appendice B – Programmazione delle Funzioni Utente
Funzioni Utente
Quando la funzione di selezione delle visualizzazioni b037 è impostata a 02 vengono visualizzate solo quelle
funzioni che sono state precedentemente associate alle Funzioni Utente U001-U012: la programmazione si
esegue associando ad ogni Funzione Utente la funzione desiderata. Vedi dettagli nell’esempio seguente.
Associazione di d001 a U001
HITACHI
Associazione di F002 a U002
Associazione di b083 a U003
HITACHI
HITACHI
POWER
POWER
ALARM
Hz
RUN
V
kW
A
%
PRG
RUN
FUNC
MIN
STOP /
RESET
1
2
Hz
RUN
V
kW
A
%
PRG
MAX
STR
POWER
ALARM
RUN
FUNC
MIN
STOP /
RESET
1
2
ALARM
V
kW
A
%
PRG
MAX
STR
Hz
RUN
RUN
FUNC
MIN
STOP /
RESET
1
2
Selezionare U001
Selezionare U002
Selezionare U003
HITACHI
HITACHI
HITACHI
RUN
FUNC
MIN
STOP /
RESET
1
2
MAX
STR
Con tasto FUNC si visualizza il dato
contenuto di U001 (no = nessuno)
RUN
FUNC
FUNC
MIN
2
MAX
STR
Selezionare d001 come
dato contenuto in U001
RUN
FUNC
FUNC
MIN
2
MAX
STR
FUNC per visualizzare
il contenuto di d001
FUNC
STOP /
RESET
1
1
2
MAX
STR
RUN
FUNC
PRG
FUNC
1
MIN
2
MAX
STR
FUNC per visualizzare
il contenuto di F002
2
Premere (2 volte) STR per
memorizzare d001 in U001
MAX
STR
RUN
FUNC
1
2
Premere (2 volte) STR per
memorizzare F002 in U002
B-1
2
MAX
STR
FUNC
MIN
STOP /
RESET
1
2
MAX
STR
FUNC per visualizzare
il contenuto di b083
HITACHI
MIN
STOP /
RESET
1
RUN
HITACHI
MIN
MIN
STOP /
RESET
HITACHI
RUN
STOP /
RESET
STR
Selezionare b083 come
dato contenuto in U003
PRG
RUN
2
MAX
HITACHI
MIN
STOP /
RESET
MIN
S TOP /
RESET
1
STR
Con tasto FUNC si visualizza il dato
contenuto di U003 (no = nessuno)
RUN
HITACHI
RUN
FUNC
HITACHI
STOP /
RESET
1
STR
Selezionare F002 come
dato contenuto in U002
HITACHI
RUN
2
RUN
HITACHI
STOP /
RESET
1
1
MAX
Con tasto FUNC si visualizza il dato
contenuto di U002 (no = nessuno)
HITACHI
RUN
MIN
STOP /
RESET
MAX
MAX
STR
RUN
FUNC
MIN
STOP /
RESET
1
2
Premere (2 volte) STR per
memorizzare b083 in U003
MAX
STR
Appendice B – Programmazione delle Funzioni Utente
Abilitazione delle
funzioni utente
HITACHI
Visualizzazioni dopo avere
impostato b037=02
HITACHI
POWER
RUN
ALARM
Hz
Hz
RUN
V
kW
A
%
PRG
RUN
FUNC
STOP /
RESET
1
MIN
2
POWER
ALARM
V
kW
A
%
PRG
MAX
RUN
STR
FUNC
STOP /
RESET
1
MIN
2
MAX
STR
Con la funzione b037 si abilita la
visualizzazione ristretta
HITACHI
RUN
FUNC
STOP /
RESET
1
HITACHI
MIN
2
MAX
RUN
STR
FUNC
STOP /
RESET
1
MIN
2
MAX
STR
FUNC per visualizzare il contenuto
di b037 (dato di fabbrica = 00)
HITACHI
HITACHI
MAX
RUN
FUNC
STOP /
RESET
1
MIN
2
RUN
STR
FUNC
STOP /
RESET
1
MIN
2
MAX
STR
Impostare 02 per la visualizzazione
ristretta alle sole Funzioni Utente
HITACHI
RUN
FUNC
STOP /
RESET
1
MIN
2
MAX
STR
Premere il tasto STR per
memorizzare l’impostazione
Per ritornare alla visualizzazione standard (visualizzazione di tutte le funzioni) reimpostare b037=00.
B-2
Appendice C – Funzioni modelli Serie HFE2
Nuove funzioni serie 2 – modelli LFU2/HFU2 e HFE2
Dal gennaio 2003 HITACHI ha introdotto la nuova serie 2 che presenta una estensione della gamma di potenza
verso il basso (modelli da 1,5kW a 7,5kW le cui dimensioni e caratteristiche tecniche sono descritte in questo
manuale) e l’aggiunta di tre funzioni che sono evidenziate in neretto su sfondo grigio chiaro nella lista parametri
che segue.
Qui di seguito viene fatta una sintetica descrizione delle funzioni aggiunte:
Funzione ROK: ingresso di abilitazione dei comandi FW / RV
La funzione agisce come interblocco di sicurezza verso un inopportuno comando di marcia da ingresso FW / RV
o pal pulsante RUN sull’operatore digitale: una volta assegnata la funzione 49 (ROK) ad uno dei terminali di
ingresso (C001-C005), se non viene attivato questo terminale il comando di marcia non viene eseguito.
Se la funzione 49 (ROK) non viene utilizzata, i terminali FW/RV o il pulsante RUN operano senza alcun
interblocco.
Abilitazione
ROK per FW /
RV
Comando
FW/REV
frequenz
a
di uscita
Funzione RMD: uscita monitor del comando RUN da operatore digitale
Se il comando di marcia inverter viene comandato (funzione A002=02) o forzato (da un ingresso avente funzione
OPE – vedi pag. 4-48) all’operatore digitale, il segnale è attivo.
Programmare un relè di uscita (C021,C022 oppure C026) con la funzione 27 (RMD).
Funzione Monitor segnale analogico: set frequenza di uscita in caso di perdita segnale di ingresso
Con il comando di frequenza originato da uno degli ingressi analogici O, O2 oppure OI, se il segnale scende al
di sotto della frequenza minima di start (b082) per 500ms o più, l’inverter assume che il segnale all’ingresso
analogico è scomparso (per disconnessione o altro) e porta la frequenza di uscita al valore programmato con la
funzione P050.
Se il segnale all’ingresso analogico ricompare stabilmente per 500ms o più, l’inverter riprenderà a seguire il
segnale come comando di frequenza.
Set funzione P050:
00= funzione disabilitata
01= la frequenza uscita si porta a 0Hz – caso a)
02= la frequenza si porta a Fmax – caso b)
03= la frequenza si porta al valore di A020 / A220 – caso c)
C- 1
Appendice C – Funzioni modelli Serie HFE2
Comando
FW / REV
b)
c)
Frequenz
a di uscita
a)
Comando frequenza
da ingresso O, OI, O2
Frequenza di start
(b082)
500ms
500ms
C- 2
Appendice C – Funzioni modelli Serie HFE2
Modo funzione
Multi-velocità -Frequenza della marcia ad impulsi
Iimpostazione ingressi
Analogici
Impostazioni basilari
Codice
Nome della funzione
Dati iniziali
Nuova Serie LFU2 / HFU2
-FE/-FU/-FR
-HFE2
01/01/00
01
01(esterno)/02(oper.digitale)/03(RS485)/04(opzione1)/05(opzione2)
01/01/02
01
Campo di impostazione
00(VR)/01(esterno)/02(oper.digit.)/03(RS485)/04(opzione1)/05(opz.
A001
Destinazione del rif. di frq.
A002
Destinazione del c.do di marcia
A003
Frequenza base
30. – Massima Frequenza (Hz)
50./ 60/ 60.
50
A203
“
30. – 2a Massima Frequenza (Hz)
50./ 60/ 60.
50
30. - 400. (Hz)
50./ 60/ 60.
50
30. - 400. (Hz)
50./ 60/ 60.
50
00 (Commutazione di O ed OI con l’ingresso AT )/
01(Commutazione di O ed O2 con l’ingresso AT )
00
00
A004
Frequenza massima
A204
A005
per secondo motore
“
per secondo motore
Funzione ingresso AT
2)
00(singolo)/01(Ingresso di somma con O, OI) [non invertente] /
02(velocità ausiliaria di O, OI [invertente]
00
00
Frequenza di start ingresso O
0.00-99.99/100.0-400.0 (Hz)
0.00
0.00
A012
Frequenza di end ingersso O
0.00-99.99/100.0-400.0 (Hz)
0.00
0.00
A013
% riferimento di start ingresso O
0.-100.0 (%)
0.
0.
A014
% riferimento di end ingresso O
0.-100.0(%)
100.
100.
A015
selezione frequenza di start ing. O
00 (frequenza di start dall’esterno)/01(0Hz)
01
01
A016
Campionamento per O, OI, O2
1.-30.(volte)
8.
8.
A019
Selezione delle multi-velocità
00 (binario:fino a 16 multi-velocità con 4 ingressi)/
01 (un bit = un terminale) : fino a 8 multi-velocità con 7 ingressi)
00
00
A020
Multi-velocità 0
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A220
Multi-velocità 0 per 2° motore
0.00, dalla frequenza di start alla 2a massima frequenza (Hz)
0.00
0.00
A320
Multi-velocità 0 per 3° motore
0.00, dalla frequenza di start alla 3a massima frequenza (Hz)
0.00
0.00
A021
Multi-velocita1
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A022
Multi-velocita2
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A023
Multi-velocita3
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A024
Multi-velocita4
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A025
Multi-velocita5
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A026
Multi-velocita6
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A027
Multi-velocita7
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A028
Multi-velocitad8
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A029
Multi-velocitad9
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A030
Multi-velocitad10
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A031
Multi-velocitad11
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A032
Multi-velocitad12
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A033
Multi-velocitad13
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A034
Multi-velocitad14
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A035
Multi-velocitad15
0.00,dalla frequenza di start alla massima frequenza(Hz)
0.00
0.00
A038
Freq. Marcia ad impulsi
0.00, dalla frequenza di start a 9.99(Hz)
1.00
1.00
00
00
00 (Boost di coppia manuale) / 01 (Boost di coppia automatico)
00
00
00 (Boost di coppia manuale) / 01 Boost di coppia automatico)
00
00
0.0-20.0(%)
1.0
1.0
0.0-20.0(%)
1.0
1.0
0.0-50.0(%)
5.0
5.0
0.0-50.0(%)
5.0
5.0
00 /01 /00
00
A006
A011
Funzione ingresso ana. O2
00(arresto Jog inerziale/non attivo in marcia) / 01(arresto jog con
A039
Selezione delle funzionalità della marcia
ad impulsi (Jog)
rampa/non attivo in marcia) / 02(arresto Jog con iniezione c.c./non
attivo in marcia) / 03(arresto Jog inerziale/valido anche in marcia –
Jog disponibile dopo la decelerazione e l’arresto) / 04 (arresto Jog
con rampa/valido in marcia) / 05 (i niezione c.c/valido in marcia)
A041
Selez.modalità Boost di coppia
Frenatura in corrente continua
Caratteristiche V/F
A241
A042
A242
A043
A243
A044
“
2° motore
Boost di coppia manuale
“
2° motore
Punto lavoro coppia di boost manuale
“
2° motore
Primo sistema di controllo
00/(VC) / 01(VP elevato a 1,7) / 02(curva V/f programmabile) /
00/(VC) / 01(VP elevato a 1,7) / 02 (curva V/f programmabile) /
A244
Secondo sistema di controllo
A045
Guadagno tensione di uscita
A051
Selezione iniezione c.c.
00(disabilitata)/01(abilitata)
00
00
A052
Frequenza iniezione c.c.
0.00-60.00(Hz)
0.50
0.50
A053
Tempo di attesa all’iniezione c.c.
0.0 - 5.0(s)
0.0
0.0
A054
Intensità dell’iniezione c.c.
0. - 100. (%)
0.
0.
A055
Tempo di iniezione c.c.
0.0 - 60.0(s)
0.0
0.0
A056
Selez. Fronte/livello per iniezione
00(agisce sul fronte)/01(agisce sul livello)
01
01
A057
Intensità iniezione c.c. allo start
0. - 100. (%)
0.
0.
A058
Tempo iniezione c.c. allo start
0.00-60.0(s)
0.0
0.0
A059
Freq. di modulazione iniez. c.c.
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
3.0
3.0
20. - 100.
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
C- 3
00 /01 /00
00
100.
100.
Appendice C – Funzioni modelli Serie HFE2
Modo Funzione
Codice
Nome della funzione
Campo di impostazione
Dati iniziali
Nuova Serie LFU2 / HFU2
-FE/-FU/-FR
-HFE2
0.00
0.00
°
Controllo PID
Limiti superiore ed inferiore e salti di
frequenza
A061
1o limite superiore di frequenza
o
0.00, oppure dal 1 limite inferiore di freq. alla Frequenza massima
(Hz)
0.00, oppure dal 2° limite inferiore di freq. alla Frequenza massima
A261
2 limite superiore di frequenza
0.00
0.00
A062
1o limite inferiore di frequenza
0.00, dalla frequenza di start al 1° limite superiore di frequenza (Hz)
0.00
0.00
A262
2o limite inferiore di frequenza
0.00, dalla frequenza di start al 2° limite superiore di frequenza (Hz)
0.00
0.00
A063
Salto di frequenza1
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A064
Ampiezza salto di frequenza 1
0.00-10.00(Hz)
0.50
0.50
A065
Salto di frequenza2
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A066
Ampiezza salto di frequenza 2
0.00-10.00(Hz)
0.50
0.50
A067
Salto di frequenza3
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A068
Ampiezza salto di frequenza 3
0.00-10.00(Hz)
0.50
0.50
A069
Frequenza di stop prima dell’acc.
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A070
Durata della frequenza di stop
0.00-60.0(s)
0.0
0.0
A071
Abilitazione del PID
00(Disabilitato)/01(abilitato)
00
00
A072
Guadagno proporzionale PID-P
0.2-5.0
1.0
1.0
A073
Guadagno integrale PID-I
0.0-3600.(s)
1.0
1.0
A074
Guadagno differenziale PID-D
0.00-100.0(s)
0.00
0.00
(Hz)
A075
Fattore di scala del PID
0.01-99.99(%)
1.00
1.00
A076
Selezione ingresso retroazione
00(retroazione : OI)/01(retroazione: O)
00
00
A081
Selezione della funzione AVR
00 (ON sempre) / 01 (OFF sempre) / 02 (OFF solo in decelerazione)
00/ 00/ 02
00
AVR
(230/400)/
A082
Selezione della tensione motore
A085
Modalità di lavoro dell’inverter
A086
A092
Risposta del risparmio
energetico.Taratura precisione
Tempo di accelerazione2
Modi operativi e funzioni di taratura
A292
Taratura dei limiti di frequenza
esterni
(2o motore)
“
A093
Tempo di decelerazione2
A293
“
(2o motore)
(230/460)
(200/400)
(230/400)/
00(normale)/01(risparmio energetico)/02(Fuzzy)
00
00
0.0-100.0(s)
50.0
50.0
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
15.00
0.01-99.99/100.0-999.9/1000.-3600.(s)
15.00
15.00
A094
Modalità di utilizzo 2a rampa
00(cambia coningresso 2CH )/01(cambia ad una frequenza impostata )
00
00
A294
Modalità di utilizzo 2a rampa
(per il 2° motore)
00(cambia c o n i n g r e s s o 2 C H ) / 0 1 (cambia ad una frequenza impostata )
00
00
A095
Frequenza di cambio con 2° rampa di
accelerazione
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A295
2° Frequenza di cambio con 2° rampa
di accelerazione (2o motore)
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A096
Frequenza di cambio con 2° rampa di
decelerazione
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A296
2° Frequenza di cambio con 2° rampa
di decelerazione (2o motore)
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
Scelta profilo rampa di accel.
00(lineare)/01(Curva ad “S”)/02(Curva ad “U”)/03(Curva ad “U”
rovesciata)
00
00
A098
Scelta profilo rampa di decel.
00(lineare)/01(Curva ad “S”)/02(Curva ad “U”)/03(Curva ad “U”
rovesciata)
00
00
A101
Frequenza di start ingresso OI
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
A102
Frequenza di end ingresso OI
0.00-99.99/100.0-400.0(Hz)
A103
OI start rate
0.-100. (%)
20.
20.
A104
% riferimento di end ingresso OI
0.-100. (%)
100.
100.
A105
% riferimento di start ingresso OI
00(Frequenza esterna di start)/01(0Hz)
01
01
A111
Frequenza di start ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
0.00
A112
Frequenza di end ingresso O2
-400.--100./-99.9-0.00-99.9/100.-400.(Hz)
0.00
0.00
A113
%riferimento di start ingresso O2
-100. - 100. (%)
-100.
-100.
A114
% riferimento di end ingresso O2
-100. - 100. (%)
100.
100.
A131
Curvatura della curva di accel.
01(piccola curvatura)-10(grande bombatura)
02
02
A132
Curvatura della curva di decel.
01(piccola curvatura)-10(grande bombatura)
02
02
b001
Selezione ripartenza automatica
00
00
0.3-1.0(s)
1.0
1.0
0.3-100.(s)
1.0
1.0
00
00
00
00
A097
Accel,
Dece
200/215/220/230/240, 380/400/415/440/460/480
00(Allarme)/01(Start da 0Hz )/02(start dalla frequenza a cui è il
motore)/
03(start alla frequenza a cui è il motore-seguente decelerazione ed
0.00 / 60.00/
0.00
0.00
Ripartenza su mancanza istant. rete
allarme)
b002
b003
b004
Tempo massimo consentito di bassa
tensione
Tempo di attesa alla ripartenza
Mancanza istantanea di rete/
Allarme bassa tensione allo stop
00(disabilitata)/01(abilitata)
02(disabilitata durante l’arresto e la decelerazione dopo un comando
di arresto)
Mancanza istantanea rete/
b005
Selezione ripartenza x bassa
tensione
00(16 volte)/01(libero)
b006
Selezione protezione di mancanza
fase
00(disabilitata)/01(abilitata)
00
00
b007
Impostazione frequenza di aggancio
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
C- 4
Appendice C – Funzioni modelli Serie HFE2
Modo funzione
Protezione termica del motore
Codice
Livello della protezione termica
Da 20% al 120% della corrente nominale(A)
b212
Livello della protezione termica (2o
motore)
Da 20% al 120% della corrente nominale(A)
b013
b213
b015
b016
b017
b019
Limitazione di sovraccarico
b020
Selezione 1a caratteristica termica
elettronica
Selezione 2a caratteristica termica
elettronica
Frequenza 1 della caratteristica
termica libera
Corrente 1 della caratteristica
termica libera
Frequenza 2 della caratteristica
termica libera
Corrente 2 della caratteristica
termica libera
Frequenza 3 della caratteristica
termica libera
Corrente 3 della caratteristica
termica libera
b021
Selezione delle modalità di
sovraccarico
b022
Regolazione del livello del limite di
sovraccarico
b023
b024
Impostazione del percorso V/f
libero
Campo di impostazione
b012
b018
Impostazioni degli ingressi programmabili
Nome della funzione
Costante di tempo della limitazione
di corrente
Selezione delle modalità di
sovraccarico 2
b025
Regolazione del livello del limite di
sovraccarico 2
b026
Costante di tempo della limitazione
di corrente 2
b031
Selezione delle modalità del blocco
software alla programmazione
b100
b101
b102
b103
b104
b105
b106
b107
b108
b109
b110
b111
b112
b113
V/f libero frequenza1
V/f libero tensione1
V/f libero frequenza2
V/f libero tensione2
V/f libero frequenza3
V/f libero tensione3
V/f libero frequenza4
V/f libero tensione4
V/f libero frequenza5
V/f libero tensione5
V/f libero frequenza6
V/f libero tensione6
V/f libero frequenza7
V/f libero tensione7
C001
Ingresso programmabile1
C002
Ingresso programmabile2
C003
Ingresso programmabile3
C004
Ingresso programmabile4
C005
Ingresso programmabile5
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
00 (caratteristica a coppia ridotta)/ 01(caratteristica costante) /
02(Impostazione libera)
Dati iniziali
-FE/-FU/-FR
Corrente
nominale
inverter
Corrente
nominale
inverter
Nuova Serie LFU2 /
HFU2 -HFE2
Corrente nominale
inverter
Corrente nominale
inverter
01/ 00/ 00
01
01/ 00/ 00
01
0.-400.(Hz)
0.
0.
0.0-1000.(A)
0.0
0.0
0.-400.(Hz)
0.
0.
0.0-1000. (A)
0.0
0.0
0.-400.(Hz)
0.
0.
0.0-1000.(A)
0.0
0.0
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante) / 03(abilitato in accelerazione /
velocità costante (aumento di velocità nel modo rigenerativo))/
01
01
Dal 50 % al 150% della corrente nominale inverter (A)
0.10-30.00(s)
I nominale
x1.20 / x1.10 /
x1.20
1.00/ 15.00/
1.00
I nominale inverter
x1.20
1.00
00(disabilitato) / 01(abilitato in accelerazione / velocità costante) /
02(abilitato a velocità costante)
01
01
Dal 50 % al 150% della corrente nominale inverter (A)
I nominale
inverter
x 1.20
I nominale inverter
x1.20
0.10-30.00(s)
1.00
1.00
01
01
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
0.
0.0
18
18
16
16
03/13/03
03
02
02
01
01
00 (impossibile cambiare alcun dato, eccetto questo, quando il
terminale SFT è ON) / 0 1 ( i m p o s s i b i l e c a m b i a r e a l c u n d a t o, e c c e t t o l a
frequenza impostata, quando il terminale SFT è O N ) / 0 2 (Impossibile
cambiare alcun dato eccetto questo ) / 03 (Impossibile cambiare alcun
dato eccetto l’impostazione di frequenza ) / 10( possibile cambiare
alcuni dati durante la marcia)
Da 0 al valore V/f della frequenza 2 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 3 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 4 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 5 (Hz)
0.-800.0(V )
Da 0 al valore V/f della frequenza 6 (Hz)
0.-800.0(V)
Da 0 al valore V/f della frequenza 7 (Hz)
0.-800.0(V)
0.-400.(Hz)
0.-800.0(V)
01 (RV:indietro abilitato) / 02 (CF1:Multivelocità1) / 03 (CF2:
Multivelocità2) /
04 (C F 3: Multivelocità3 ) / 05 (CF4: Multivelocità4 ) / 06 (JG:Jogging)/
07 (DB:Frenatura esterna in c.c ) / 08 (SET: 2o settaggio dei
parametri /
09 (2CH:c.do seconda rampa) / 11 (FRS: arresto inerziale) / 12
(EXT:Allarme esterno)/
13 (USP:Prevenzione alle ripartenze non volute) / 14
(CS:commutazione del motore su rete) / 1 5 (SFT:blocco software) / 1 6
(AT: Selezione ingresso analogico in tens. / corr.) /
18( R S : ripristino allarmi) / 2 0 (STA:marcia a 3 flili) / 2 1 (STP: a tre fili )
/ 2 2 (F/R: avanti indietro a 3 fi l i ) / 23 (PID:abilitazione/disabilitazione
P I D ) / 24 (PIDC:reset dell’errore integrale del PID) / 27(UP:aumenta
da remoto) / 28 (DWN:diminuisci da remoto) /
29 (UDC:cancellazione set frequenza UP/DOWN con controllo
remoto) /
31(OPE: forzatura comandi su operatore digitale) / 32
(SF1:Multi-velocità bit1) /
33 (SF2: Multi -velocità bit2) / 3 4 (SF3: Multi -velocità bit3) / 3 5 (SF4:
Multi-velocità bit4) /
36 (SF5: Multi -velocità bit5) / 3 7 (SF6: Multi -velocità bit6) / 3 8 (SF7:
Multi-velocità bit7)/
39 (OLR:cambio del limite di sovraccarico) / no( nessuna funzione),
48 (ROK abilitazione comando FW/RV).
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
C- 5
Appendice C – Funzioni modelli Serie HFE2
Modo funzione
Impostazione delle uscite programmabili
Impostazione degli
ingressi programmabili
Codici
Nome della funzione
Dati iniziali
Nuova Serie LFU2 / HFU2
-FE/-FU/-FR
-HFE2
00(NA)/01(NC)
00
00
00(NA)/01(NC)
00
00
Campo di impostazione
C011
Ingresso1 selezione a/b (NA/NC)
C012
Ingresso2 selezione a/b (NA/NC)
C013
Ingresso3 selezione a/b (NA/NC)
00(NA)/01(NC)
00/ 01/ 00
00
C014
Ingresso4 selezione a/b (NA/NC)
00(NA)/01(NC)
00
00
C015
Ingresso5 selezione a/b (NA/NC)
00(NA)/01(NC)
00
00
C019
Ingresso FW selezione a/b (NA/NC)
00(NA)/01(NC)
00
00
01
01
00
00
05
05
00
00
00
00
00
00
C021
Impostazione dell’uscita 11
C022
Impostazione dell’uscita 12
C026
Relè di allarme inverter
NA= Normalmente Aperto
NC= Normalmente Chiuso
00 (RUN:Inv. In marcia) / 01 (FA1:Uscita di arrivo in frequenza
modalità FA1) /
02( FA2: Uscita di arrivo in frequenza modalità FA2) / 03
(OL:preallarme sovraccarico) / 04 (OD:errore eccessivo controllo
PID) / 05(AL:Uscita di allarme) /
06 (FA3: set point di frequenza raggiunto) / 08(IP:Arresto
temporaneo per mancanza rete) / 09(UV: bassa tensione di
alimentazione) / 11(RNT: tempo di inverter RUN scaduto /
12(ONT:tempo di inverter ON scaduto) / 13 (THM: preallarme
protezione termica ) / 27 (RMD: comando di RUN da operatore
Offset e tarature degli
ingressi/uscite analogiche
Parametri della
comunicazione
Impostazioni uscite ?
Impostazione delle soglie
digitale)
00 (Frequenza di uscita) / 01 (Corrente di uscita) / 03 (uscita di
frequenza digitale) / 04(Tensione di uscita) / 05 (Potenza di
ingresso) / 06 (% di carico termico) / 07(frequenza in limitazione
LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 0 5 ( P o t e n z a i n i n g r e s s o ) / 06( % di carico
termico) /
07(frequenza in limitazione LAD)
00( Frequenza di uscita ) /01(Corrente di uscita /
04(Tensione di uscita) / 0 5 ( P o t e n z a i n i n g r e s s o ) / 06( % di carico
termico) /
07(frequenza in limitazione LAD)
C027
Selezione uscita FM
C028
Selezione uscita analogica AM
C029
Selezione uscita analogica AMI
C031
Selez. Uscita 11 a/b (NA/NC)
00(NA)/01(NC)
00
00
C032
Selez. Uscita 12 a/b (NA/NC)
00(NA)/01(NC)
00
00
C036
Sel. Relè allarme a/b (NA/NC)
00(NA)/01(NC)
01
01
C040
Selezione Uscita di avvertimento di
sovraccarico
00(ON durante accel.,decel.e velocità costante)/01(Solo a velocità
costante)
01
01
C041
Impostazione del livello di avvertimento
di sovraccarico
Da 0.0 al 200% della corrente nominale(A)
Corrente
nominale
inv.
Corrente nominale
inverter
C042
Impostazione del segnale di arrivo in
frequenza in accel.
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
C043
Impostazione del segnale di arrivo in
frequenza in decel.
0.00-99.99/100.0-400.0(Hz)
0.00
0.00
C044
Livello di scostamento PID
0.0-100.0(%)
3.0
3.0
C061
Impostazione livello avvertimento
termico
0.0-100.0(%)
80.0%
80.0%
C070
Provenienza dati Data command
02(operatore digitale)/03(RS485)/04(opzione1)/05(opzione2)
02
02
C071
Velocità di comunicazione
02(test della comunicazione seriale “loop-back test”)
03(2400bps)/04(4800bps)/05(9600bps)/06(19200bps)
04
04
C072
Codice di comunicazione
1. -32.
1.
1.
C073
Bit/Carattere
7(7bit)/8(8bit)
7
7
C074
Parità
00(no parità)/01(parità/02(disparità)
00
00
C075
Bit di stop
C078
Tempo attesa comunicazione
C081
Taratura ingresso “O”
0.-9999./1000-6553(10000-65530)
C082
Taratura ingresso “OI”
0.-9999./1000-6553(10000-65530)
C083
Taratura ingresso “O2”
0.-9999./1000-6553(10000-65530)
C085
Taratura ingresso termistore
0.0 - 1000.
105.0
105.0
C086
Taratura offset uscita AM
0.0 - 10.0(V)
0.0
0.0
C087
Taratura uscita AMI
0. - 255.
50
50
0. - 20.0(mA)
Tarato in
fabbrica
Tarato in fabbrica
C088
Taratura offset uscita AMI
1(bit)/2(bit)
1
1
0.-1000.(ms)
0.
0.
(Nota): <>indica il campo di programmazione per i modelli da 90 a 132kW
C- 6
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in fabbrica
Tarato in fabbrica
Tarato in fabbrica
Appendice C – Funzioni modelli Serie HFE2
Modo Funzione
Codici
Tempo di i n v e r t e r i n m a r c i a / T e m p o d i
inverter alimentato
0.-9999./1000-6553(10000-65530) ore
0.
0.
b035
Disabilitazione senso marcia
00(avanti e indietro abilitati)/01(solo marcia avanti)/02(solo indietro)
00
00
b036
Tensione ridotta all’avviamento
00(tempo di tensione ridotta breve)-06(tempo di tensione ridotta lungo)
06
06
00(tutto) / 01(ogni funzione) / 02 (Impostazioni utente / Impostazioni
principali)
00
00
0. - 255.
180
180
b037
Selezione visualizzazione
b080
Taratura uscita AM
b081
Taratura uscita FM
0. - 255.
60
60
b082
Frequenza di start
0.10-9.99(Hz)
0.50
0.50
b083
Frequenza di modulazione
0.5-12 kHz o < 0.5-8 kHz > - con declassamento
3.0
3.0
b084
Inizializzazione
00
00
b085
b091
Codice della Nazione
Fattore di conversione della
frequenza per funzione d007
Tasto di STOP abilitato
Modalità di riavvio dopo FRS
Rapporto di utilizzo frenatura
dinamica BRD
Selezione modalità di stop
b092
Controllo ventilatori inverter
b095
Selezione della funzione BRD
b096
b098
b099
Livello di intervento della BRD
Selezione termistore
Livello di errore del termistore
Impostazione livello di avvertimento
termico
Selezione del modo Debug
Modalità di funzionamento del
comando aumenta/diminuisci
b090
Altre funzioni
HFU2 -HFE2
b034
b087
b088
C061
C091
C101
00(Cancellazione memoria allarmi)/01(Inizializzazione dati)/
02(Cancellazione memoria allarmi + Inizializzazione dati)
00(Interno)/01(Europeo)/02(Ameri cano)
01/ 02/ 00
01
0.1-99.9
1.0
1.0
00(abilitato)/01(disabilitato)
00(riavvio da 0Hz) / 01(aggancio a frequenza motore)
00
00
00
00
0.0-100.0(%)
0.0
0.0
00(si arresta con decelerazione)/01(Si arresta per inerzia)
00(sempre attivi )/01(attivi in marcia dopo aver alimentato, si arresta
dopo 5 minuti dall’arresto del motore.)
00(disabilitata)/01(abilitata<disabilitata durante lo stop>)/02(abilitata
durante lo stop >)
330-380 / 660-760(V)
00(disabilitato)/01(PTC abilitato)/02 (NTC abilitato)
0. – 9999. (ohm)
00
00
00
00
00
00
360/720
00
3000.
360/720
00
3000.
0-100 (%)
80
80
00(No attivo)/01(attivo)
00
00
01(non mantiene) / 00(mantiene l’ultimo valore di frequenza)
00
00
00
00
C102
Modalità comando di di reset
C103
Aggancio al volo dopo reset
00(sul fronte di salita) / 01(sul fronte di discesa)/
02(sul fronte di salita, attivo solo in caso di blocco)
00(riavvio da 0Hz) / 01(Riavvio con aggancio al volo)
C121
Taratura di “zero” ingresso O
0.-9999./1000-6553(10000-65530)
C122
Taratura di “zero” ingresso OI
0.-9999./1000-6553(10000-65530)
C123
Taratura di “zero” ingresso O2
0.-9999./1000-6553(10000-65530)
H003
Numero poli 1o motore
Numero poli 2o motore
K stabilizzazione1o motore
K stabilizzazione2o motore
Comportamento opzione 1 su errore
Comportamento opzione 2 su errore
Selezione modalità opzione ingressi
digitali (Acc/Dec)
Impostazione posizione di Stop con
scheda opzionale SJ-DG
(in modalità orientamento).
Impostazione tempo di Timeout con
comunicazione DeviceNet
Comportamento dell’inverter in caso
di errore di comunicazione.
Output Instance Number - d e f i n i s c e i l
formato delle uscite.
Input Instance Number - definisce il
formato degli ingressi
Comportamento dell’inverter in caso
di “Idle mode”.
Numero poli motore - per comando
velocità motore.
Freq. uscita in caso di perdita
ingresso analogico O/ O2/ OI
P045
P046
P047
P048
P049
P050
00
00
00 (operatore digitale) / 01 (opzione1) / 02 (opzione 2)
00
00
0.20-75.0(kW) <0.2-160kW>
Potenza nominale 2 motore
P044
00(Modo 0)/01(Modo 1)/02(Modo 2)
0.20-75.0(kW) <0.2-160kW>
o
Potenza nominale 1 motore
H004
H204
H006
H206
P001
P002
P032
2/4/6/8(poli)
2/4/6/8(poli)
0. - 255.
0. - 255.
00(Allarme)/01(Marcia)
00(Allarme) / 01(Marcia)
00
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
Tarato in
fabbrica
4
4
100.
100.
00
00
o
H203
P031
Opzioni
Nuova Serie LFU2 /
Campo di impostazione
b086
Tabella utente
Dati iniziali
-FE/-FU/-FR
Nome della funzione
00
Tarato in fabbrica
Tarato in fabbrica
Tarato in fabbrica
Tarato in fabbrica
Tarato in fabbrica
4
4
100.
100.
00
00
0.00-99.99s
1.00
1.00
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
01
20, 21, 100
21
21
70, 71, 101
71
71
00(Blocco) / 01(Blocco al termine della decelerazione) /02(Ignora)
03 (Arresto inerziale) / 04 (arresto con decelerazione)
01
01
0-38 (possibile impostare solo numeri pari)
0
0
00 (funzione disabilitata) / 01 (Fout=0Hz) / 02 (Fout=Fmax) / 03
(Fout=A020)
00/ 00/ --
00
U001
Selezione Utente 1
no/d001-P002
no
no
U002
Selezione Utente 2
no/d001-P002
no
no
U003
Selezione Utente 3
no/d001-P002
no
no
U004
Selezione Utente 4
no/d001-P002
no
no
U005
Selezione Utente 5
no/d001-P002
no
no
U006
Selezione Utente 6
no/d001-P002
no
no
U007
Selezione Utente 7
no/d001-P002
no
no
U008
Selezione Utente 8
no/d001-P002
no
no
U009
Selezione Utente 9
no/d001-P002
no
no
U010
Selezione Utente 10
no/d001-P002
no
no
U011
Selezione Utente 11
no/d001-P002
no
no
U012
Selezione Utente 12
no/d001-P002
no
no
(Nota)<>indica il campo di programmazione per modelli da 90 a 132kW
C- 7
Scaricare