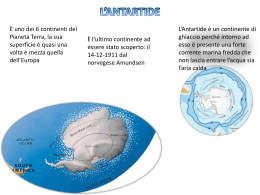
Lab. Sistemi automatici - ITIS Galileo Galilei Roma GP_Mesh-Net 1.0 Che cos’è il Gp_Mesh-Net ? E’ un sistema automatico di monitoraggio ambientale wireless flessibile modulare robusto economico Architettura del sistema [1] E’ costituito da una rete di stazioni di rilevamento ambientale (mesh net) composto da: Un’unità centrale (Coordinator) Stazioni intermedie (Router ) Stazioni periferiche (End Device) Architettura del sistema [2] Architettura del sistema [3] Unità centrale (Coordinator) Il modulo coordinatore interroga tutte le stazioni della rete per acquisire i dati monitorati da ciascuna stazione. Nel caso in cui vengano rilevati valori ambientali anomali è in grado di comunicarli ad una centrale operativa . Architettura del sistema [4] Stazioni intermedie (Router) Hanno il compito di instradare da e verso il coordinatore le informazioni provenienti dalle altre stazioni periferiche della rete. Ciascun Router può connettersi fino ad 8 stazioni di monitoraggio (Router o End Device) . Architettura del sistema [5] Stazioni periferiche (End Device) Trasmettono i dati ambientali rilevati alla stazione Router a cui è collegata. Ciascun Router può connettersi fino ad 8 stazioni di monitoraggio (Router o End Device). Flessibilità del sistema: Il sistema è configurabile a seconda del tipo di monitoraggio richiesto, ad esempio: Rilevamento di incendi nei boschi Monitoraggio di frane in montagna Rilevamento di inquinamento dell’aria Modularità del sistema: Il sistema è facilmente espandibile anche in tempi successivi e quello di istallazione. E’ possibile aggiungere una nuova stazione di monitoraggio semplicemente posizionandola entro il raggio di comunicazione di almeno un’altra stazione della rete. Il numero massimo delle stazioni di rilevamento collegabili è superiore a 65000. Robustezza del sistema: Le comunicazioni tra le stazioni sono aggiornate dinamicamente; ciascuna di esse è in grado di connettersi automaticamente alle stazioni vicine . Alta affidabilità in caso di guasti a singole stazioni. Prototipo: coordinatore [1] Il coordinatore è stato simulato tramite : Personal computer Modulo ricetrasmettitore dati RF 2.4 GHz connesso al Pc tramite porta USB Software di sviluppo LabWindows CVI Prototipo: coordinatore [2] Pannello di controllo – Lab Windows CVI Prototipo: Router/End Device [1] Il Router e l’End Device sono stati realizzati utilizzando: Schede a microcontrollore PIC 18F2542 Moduli ricetrasmettitore dati RF 2.4 GHz Software di sviluppo implementato in C18 Sensori di diverse tipologie Prototipo: Router/End Device [2] Scheda Microcontrollore PIC 18F2540 40 MHz Prototipo: Router/End Device [3] Modulo ricetrasmettitore dati RF 2.4 GHz Prototipo: Router/End Device [4] Sensori utilizzati nel prototipo: Simulazione di un generico sensore analogico (trimmer) Sensore inquinamento aria CO Sensore ad ultrasuoni per monitoraggio frane GP_Mesh-Net 1.0 Eventuali possibili sviluppi futuri: Progettazione del modulo coordinatore “da campo” in grado di avvisare la centrale operativa; Progettazione del sistema di alimentazione tramite pannello solare e batterie Ingegnerizzazione del progetto
Scaricare