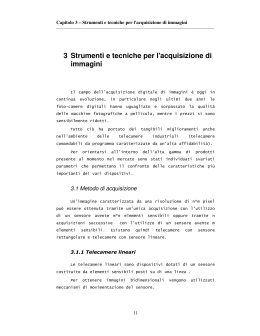
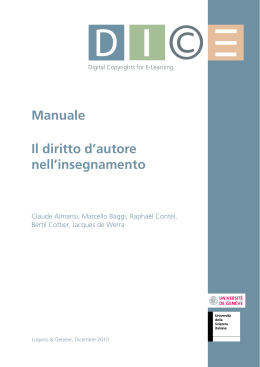
CAPITOLO 1 – MISURE DI FLUSSO 6 Capitolo 1 Misure di flusso 1.1 Introduzione La maggior parte dei tipi di flusso, naturali o artificiali, è di tipo turbolento. Tali fenomeni sono governati dalle ben note equazioni di Navier-Stokes [10] : ρ Du i ∂τ ij = + ρf i Dt ∂X j (1.0) Nei casi di flusso turbolento, si ha a che fare con moti tridimensionali e presenza di vortici, in questi casi la risoluzione delle equazioni di Navier-Stokes diventa spesso proibitiva, da ciò la necessità di effettuare misure di velocità. In questo capitolo saranno descritti i principali metodi di misurazione del flusso utilizzati attualmente nei più avanzati laboratori di ricerca. 1.2 Caratteristiche principali dei sistemi di misura. L’anemometria a filo caldo (HWA), l’anemometria laser doppler (LDA) e la velocimetria per immagini (PIV), sono le tecniche più diffuse per CAPITOLO 1 – MISURE DI FLUSSO 7 le misure di velocità. La maggior parte degli anemometri a filo caldo impiega il sistema a temperatura costante (CTA). Di seguito sono schematizzate le principali caratteristiche dei sistemi sopra elencati, che permettono un rapido paragone delle diverse proprietà: CTA LDA PIV Non lineare lineare lineare Proporzionalità velocita-segnale in uscita S(t). Risoluzione spaziale Interferenza col Single point Single point tipicamente 5 Tipicamente 100 d’ingrandimento µm x 1 mm µm x 1 mm Dipende dal tipo del campo. Si no no Si no no processo fisico Influenza di altre variabili Tabella 1.1 Confronto tra i più comuni sistemi di misurazione di velocità La tabella precedente evidenzia una caratteristica molto importante di tutti i sistemi di diagnostica del flusso, ovvero la risoluzione spaziale, che insieme alla risoluzione temporale, costituisce caratteristica fondamentale dei sistemi di misura. Per risoluzione spaziale, s’intende la minima grandezza del volume di misura, che deve essere più piccolo possibile per descrivere al meglio il flusso. Per risolvere correttamente il moto turbolento, la risoluzione speziale deve essere anche tre volte più piccola della scala di Kolmogorov. Tipicamente il sensore del CTA presenta un diametro di alcuni micron e lunghezza di pochi millimetri e considerando anche CAPITOLO 1 – MISURE DI FLUSSO 8 l’alta risposta in frequenza, questo tipo di sensore risulta adatto per flussi turbolenti. Il volume di misura di un sistema LDA, definito dall’intersezione dei due raggi laser, tipicamente ha diametro di 100 µm e lunghezza di 1 mm. Tale volume, può essere però ristretto utilizzando dei dispositivi che permettono l’espansione dei raggi e aumentano la distanza di separazione; va detto però che al diminuire del volume di misura, diminuisce anche il numero di frange presenti ed aumenta quindi l’incertezza di misura. Il volume di controllo, o meglio l’area, dei sistemi PIV, più comunemente nota come regione di interrogazione, ha tipicamente dimensione di 32 x 32 pixels, il che significa 3x3 mm. Esistono però casi in cui anche con questo sistema sono state ottenute risoluzioni spaziali di pochi micron. Anche la risoluzione temporale, ovvero la risposta in frequenza è una caratteristica fondamentale di tali sistemi di misura. Il sistema CTA, grazie ad un amplificatore incorporato sul ponte di Wheatstone garantisce una risposta in frequenza dell’ordine dei 100 kHz; questa caratteristica rende il sistema CTA uno strumento ideale per l’analisi spettrale in molti flussi. Anche il sistema LDA teoricamente raggiunge una risposta in frequenza dell’ordine dei 100 kHz, ma in pratica a causa delle dimensioni del volume di misura, e della concentrazione di inseminante, i dati validi sono al massimo dell’ordine di decine di kHz. Questa risoluzione spaziale risulta comunque accettabile per molti tipi di flusso. Nei sistemi PIV la risoluzione temporale è principalmente limitata dalle caratteristiche della foto-camera (framing-rate) e dalla frequenza di CAPITOLO 1 – MISURE DI FLUSSO 9 pulsazione della fonte luminosa. Valori tipici della risposta in frequenza sono compresi tra i 15 e i 30 Hz. Riassumendo, i sistemi LDA e CTA presentano alte risoluzioni spaziali e temporali, e risultano quindi adatti sia per misure di quantità medie che istantanee. Il punto di forza del sistema PIV risulta essere la capacità di misurare simultaneamente la velocità in più punti, rendendolo insostituibile sia nell’analisi della struttura dei flussi tridimensionali che in quella dei fenomeni di transizione. Nei successivi paragrafi sarà presentata una descrizione più dettagliata dei sistemi sopra citati. 1.3 Anemometro a temperatura costante (CTA) L’anemometro a filo caldo è stato introdotto nella metà del ventesimo secolo, ed il suo contributo è stato fondamentale negli studi della turbolenza. La misura della velocità istantanea del flusso è basata sulla trasmissione del calore. In particolare la quantità di calore ceduto dal sensore al fluido è proporzionale alla velocità del flusso. In particolare nell’anemometro a temperatura costante l’elemento sensibile è mantenuto sempre alla stessa temperatura grazie ad un controllo di feedback. Il controllo della temperatura è effettuato variando la tensione, quindi si ha una corrispondenza proporzionale tra il calore ceduto e l’energia elettrica. La legge che lega l’energia elettrica e la velocità del flusso è di tipo esponenziale [10]: CAPITOLO 1 – MISURE DI FLUSSO E 2 = A + BU n 10 (1.1) tale legge è nota come legge di King, dove i coefficienti A, B e n, sono spesso modellati utilizzando relazioni polinomiali del quarto grado. La bassa inerzia termica in combinazione con l’amplificazione sul ponte di Wheatstone, rendono il CTA adatto a seguire le fluttuazioni, tipiche di moti turbolenti. Di seguito è riportato lo schema base del sistema. Figura 1.1 Schema base del sistema CTA La relazione tra la velocità del fluido e il calore rilasciato dal sensore è basata sull’assunzione di fluido incompressibile. CAPITOLO 1 – MISURE DI FLUSSO 11 Attualmente esistono in commercio quattro tipi di sensori: Miniature wires, Gold-plated wires, Fiber-film e Film-sensors; la loro schematizzazione è riportata in figura. Figura 1.2 Tipologie di sensore CTA, dall'alto a sinistra procedendo in senso orario: wire sensor, gold plated wire sensor, fiber film sensor e film sensor Le tipologie di sonda vengono scelte in base alle caratteristiche del flusso da analizzare, in particolare la “wire sensor” è adatta per flussi con intensità di turbolenza intorno al 5-10% , ha la più alta risposta in frequenza ed è riparabile in caso di rottura; la “gold-plated wire sensor” risulta adatta per flussi con intensità di turbolenza dell’ordine del 2025% e anch’essa è riparabile. Le altre tipologie di sonda sono ricoperte di un film di quarzo, che ne aumenta la resistenza, in particolare lo spessore dello strato è sottile nei casi in cui si intende misurare un flusso di gas “sporco” e diventa consistente quando si ha a che fare con acqua o altri liquidi. CAPITOLO 1 – MISURE DI FLUSSO 12 Il principale difetto di questi sensori è quello di avere una grande sensibilità direzionale, cioè la loro risposta varia in base alla direzione del flusso. È necessario quindi effettuare oltre alla normale calibrazione, una di tipo direzionale. La necessità di calibrare lo strumento, l’intrusività del sistema, la fragilità della sonda e considerando inoltre che il sistema CTA non è in grado di fornire informazioni sulla direzione del flusso, rendono attualmente questo sistema superato dai nuovi sistemi LDA e PIV. 1.4 Sistemi PIV (Particle immage velocimetry) La tecnica PIV è basata sulle immagini lasciate dalla particella inseminante. Per ottenere buoni risultati la particella inseminante deve seguire le linee di corrente. In tal modo è possibile ottenere la velocità del flusso misurando lo spazio percorso dalla particella e dividendolo per il tempo impiegato a percorrerlo. Per ottenere valori accurati di velocità istantanea, il tempo di esposizione, cioè quello che intercorre tra due foto, deve essere minore delle scale di tempo nel flusso e la risoluzione spaziale deve essere piccola rispetto alle scale di lunghezza del flusso. La relazione tra lo spazio percorso e la velocità delle particelle è evidenziata nella successiva figura. CAPITOLO 1 – MISURE DI FLUSSO 13 Figura 1.3 Relazione tra spazio percorso e velocità istantanea della particella Le immagini registrate si suddividono in sottoregioni, note come regioni di interrogazioni, che determinano la risoluzione spaziale del sistema. Spesso queste sottoregioni non sono adiacenti, ma sovrapposte; i tipi di esposizione possono essere di tipo singolo o multiplo, ovvero in un frame è possibile ritrovare la particella in più posizioni, e si parla di esposizione multipla e vengono utilizzate delle autocorrelazioni tra spazio e tempo, mentre per le esposizioni singole si utilizzano le cosiddette correlazioni incrociate. Di seguito è riportato un esempio di applicazione di funzioni di autocorrelazione per un’immagine a esposizione multipla. Figura 1.4 Analisi mediante autocorrelazione di immagine a doppia esposizione CAPITOLO 1 – MISURE DI FLUSSO 14 Le correlazioni incrociate presentano invece un singolo picco al centro, la differenza tra quest’ultime e le autocorrelazioni è mostrata in figura 5. Figura 1.5 Confronto tra autocorrelazione (sinistra) e correlazione incrociata (destra) Per evitare problemi di rumore è necessario che nella regione di interrogazioni esistano particelle comuni, che sono state correlate, ma se si vuole aumentare l’accuratezza, è necessario aumentare il ∆t tra le pulsazioni luminose, a sua volta l’aumento dell’intervallo di tempo diminuirà la possibilità dell’esistenza di particelle comuni nella regione di interrogazione; una buona regola in questo senso è di scegliere un ∆t tale da assicurare alla particella l’attraversamento di un terzo della regione di interrogazione. La quasi totalità dei sistemi PIV attualmente in commercio, è composta principalmente da: foto-camera digitale, sistema laser a doppia cavità Nd:Yag e software di post-processing. Di seguito è riportato uno schema del sistema di misura ed analisi del sistema PIV. CAPITOLO 1 – MISURE DI FLUSSO 15 Figura 1.6 Schema del processo di misura ed analisi del sistema PIV La sorgente luminosa, può essere ottenuta sia mediante laser, che mediante luce bianca; questa duplice scelta è dovuta alla pericolosità del laser, che comunque ha il vantaggio di una perfetta convergenza, quindi la scelta della fonte di luce viene spesso dettata dalle esigenze di misura. La maggior parte dei moderni laboratori adotta comunque un sistema laser a doppia cavità Nd:Yag , conosciuto anche come “PIV laser”, che ha una durata dell’impulso luminoso di 10 nanosecondi ed una frequenza compresa tra i 5 e i 30 Hz. Una volta raccolte le immagini è necessario convalidarle prima di passare ad un’analisi statistica; tipicamente vengono utilizzati due criteri per la convalida dei dati, il primo è basato sul rapporto tra le altezze dei picchi della correlazione, in particolare se P1 è il picco più alto e P2 è il secondo picco più alto, i dati validi saranno caratterizzati dall’avere P1/P2 ≥ k, dove k vale tipicamente 1,2. Il secondo criterio è basato sul range di velocità imposto a priori, questo criterio presuppone che si abbia un’idea del range di velocità del flusso, tutti i vettori al di fuori del range non vengono convalidati. CAPITOLO 1 – MISURE DI FLUSSO 16 Va comunque detto che i criteri sopra citati vanno applicati unitamente ai criteri di scelta delle particelle inseminanti, quest’ultimo aspetto ricopre importanza fondamentale nel processo di misura. A seconda del tipo di flusso e di fluido, quindi in base alla velocità ed alla sostanza sotto esame, devono essere scelti gli inseminanti di dimensione opportuna. L’inseminante deve essere abbastanza grande da risultare visibile, ma deve avere un’inerzia tale da seguire le linee di flusso; è pratica comune utilizzare particelle di diametro inferiore quando si ha a che fare con alte velocità per diminuirne la quantità di moto. Inseminante Fluido Diametro (µm) Uf = 1 kHz Uf = 10 kHz Olio Aria atmosferica 2.6 0.8 Tlo Aria atmosferica 1.3 0.4 Mo Fiamma di metano(1800 K) 2.6 0.8 Tlo Plasma d’ossigeno(2800 K) 3.2 0.8 Tabella 1.2 Dimensioni richieste dell'inseminante per seguire le fluttuazioni di velocità Uf Per completezza di trattazione vengono riportati i più importanti inseminanti per l’analisi di flussi d’aria e di flussi d’acqua. CAPITOLO 1 – MISURE DI FLUSSO 17 Diametro Materiale Particella[mm] Al2O3 <8 Glicerina 0,1-5 Olio di silicone 1-3 Particelle di SiO2 1-5 Polvere di TiO2 Da < 1µm a 10 µm acqua 1-2 Osservazioni Prodotto per fluidizzazione, viene spesso utilizzato per inseminare fiamme, grazie al suo alto punto di fusione. Generata solitamente per atomizzazione. Molto soddisfacente. Hanno dimensione quasi costante, hanno grande capacità di scattering, migliore del TiO2 ma non quanto la glicerina. Buone proprietà di scattering, ottima stabilità anche sopra i 2500°C, range di dimensioni delle particelle molto ampio. Generata per atomizzazione,è necessario aggiungere un inibitore di evaporazione. Tabella 1.3 Tipici inseminanti per flussi d'aria Diametro Materiale Particella[mm] Polvere d’alluminio Bolle < 10 5-500 Ballons di vetro 10-150 Perline di lattice 0,5-90 latte 0,3-3 Tabella 1.4 Osservazioni Buone proprietà di scatternig Possono essere utilizzate solo con fluido bifase. Economico per grandi volumi, ma dimensioni delle particelle molto variabili. Possono essere prodotte di dimensione quasi costante, ma sono leggermente costose. Economico ed efficiente. Tipici inseminanti per flussi d'acqua CAPITOLO 1 – MISURE DI FLUSSO 18 1.5 Sistemi LDA (Laser Doppler Anemometry) La tecnica di anemometria Laser Doppler è attualmente la più utilizzata nel campo delle misure di flusso, verrà quindi descritta con maggiore dettaglio rispetto alle precedenti, poiché anche le misure di velocità presentate nei successivi capitoli, sono state ottenute mediante tale sistema. La spiegazione del consistente impiego dei sistemi LDA nei laboratori di misura, sta nel fatto che tale sistema offre una serie di vantaggi rispetto agli altri sistemi di misurazione del flusso. La non intrusività del sistema di misura, ad esempio, costituisce un’importante aspetto del sistema, che necessità soltanto di un accesso ottico dove focalizzare i raggi laser; anche nel caso di sonda sommersa in un liquido, le misure vengono effettuate ad una distanza tale, da poter considerare nulli gli effetti di disturbo della sonda stessa. Un altro vantaggio è l’assenza di calibrazione, poiché la risposta del sistema alla velocità del fluido è lineare, le misure sono basate sulla stabilità delle onde elettromagnetiche, che per molti scopi pratici possono essere considerate non affette da altre grandezze come temperatura o pressione. Le dimensioni ridotte del volume di controllo e l’alta risposta in frequenza ne assicurano inoltre una grande risoluzione spaziale e temporale. Inoltre il sistema LDA offre la possibilità di misurare due o tre componenti di velocità simultaneamente, se accoppiato con sistemi basati sulla separazione del colore. CAPITOLO 1 – MISURE DI FLUSSO 1.5.1 19 Descrizione del raggio laser La proprietà più importante che rende il raggio laser adatto a numerose misure di tipo meccanico, è la coerenza spazio-temporale. L’intensità del raggio ha una distribuzione di tipo gaussiano, e l’ampiezza viene definita dall’intensità di lato, che è pari al 13% dell’intensità di picco. Il raggio laser al contrario di come appare, ha una piccola divergenza, ed esiste un punto dove la sezione è minima, detto punto di gola, dove il diametro assume la sua dimensione più piccola. Figura 1.7 Raggio laser con distribuzione gaussiana dell'intensità Conoscendo la lunghezza d’onda λ il raggio laser è univocamente descritto dalla dimensione della gola d0 e dalla sua posizione [10]. divergenza del raggio α= 4λ πd 0 (1.2) CAPITOLO 1 – MISURE DI FLUSSO 20 ⎛ 4λz 1 + ⎜⎜ 2 ⎝ πd 0 diametro del raggio d ( z) = d 0 raggio del fronte d’onda ⎡ ⎛ πd ⎞ 2 ⎤ R z = z ⎢1 + ⎜ 0 ⎟ ⎥ ⎢⎣ ⎝ 4λz ⎠ ⎥⎦ ⎞ ⎟ ⎟ ⎠ 2 (1.3) (1.4) Va precisato che la divergenza del raggio è molto più piccola di come appare in figura che è a semplice scopo illustrativo, ed effettivamente ad occhio nudo il raggio appare dritto e di spessore costante. È importante precisare che le misure devono essere effettuate nella sezione di gola, poiché essendo nullo il valore dell’ascissa locale z, il raggio del fronte d’onda tende a zero, quindi le onde possono considerarsi piane; tale accorgimento permette di applicare la teoria delle onde piane, che semplifica notevolmente i calcoli. 1.5.2 Effetto Doppler La tecnica LDA utilizza l’effetto Doppler, per le misure istantanee di velocità. Quando una particella in moto viene colpita da un fascio luminoso ad una certa frequenza, essa rifletterà la luce ad una frequenza diversa, direttamente proporzionale alla velocità della particella, tale fenomeno è detto effetto Doppler. CAPITOLO 1 – MISURE DI FLUSSO 21 Il principio di funzionamento è illustrato nella seguente figura: Figura 1.8 Luce riflessa dalla particella inseminante in moto con velocità U dove U rappresenta la velocità della particella , mentre i vettori unitari ei ed es le direzioni della luce incidente e della luce riflessa (scattering). Il ricevitore vede quindi una frequenza diversa da quella emessa, tale frequenza, detta frequenza di scattering fs, può essere calcolata della relazione [10]: f s = fi ( c) 1 − e (U ) c 1 − ei U (1.5) s dove c è la velocità della luce. Anche per flussi supersonici il rapporto U/c è molto minore di 1, quindi l’esquazione 1.5 può essere linearizzata nel modo seguente: f ⎡ U ⎤ f s ≅ f i ⎢1 + (e s − ei )⎥ = f i + i U (e s − ei ) = f + ∆f c c ⎣ ⎦ (1.6) CAPITOLO 1 – MISURE DI FLUSSO 22 dove attraverso la conoscenza dello spostamento di frequenza ∆f è possibile calcolare la velocità della particella U. In pratica la ∆f può essere misurata, utilizzando l’interferomentro di Fabry-Perot, soltanto per particella ad alta velocità. Comunemente nelle misure LDA il raggio laser viene suddiviso in due raggi, che attraverso una lente vengono focalizzati in un punto; la differenza di frequenza captata dal ricevitore è dunque proporzionale all’angolo formato dai due raggi, che inizialmente presentano la medesima frequenza, quindi la frequenza Doppler può essere calcolata come [10]: ⎡ U ⎤ ⎡ U ⎤ ⎡U ⎤ f D = f s , 2 − f s ,1 = f 2 ⎢1 + (e s − e2 )⎥ − f 1 ⎢1 + (e s − e1 )⎥ = f I ⎢ (e1 − e2 )⎥ = c c ⎣ ⎦ ⎣ ⎦ ⎣c ⎦ f 2 sen(θ 2 ) = I [ e1 − e2 ⋅ U cos(ϕ )] = ux c λ (1.7) dove θ rappresenta l’angolo formato dai raggi incidenti, mentre φ rappresenta l’angolo formato dal vettore velocità U e dalla direzione di misura. Nella 1.7 è stato inoltre assunto, come è lecito, che i due raggi abbiano la stessa frequenza iniziale che è stata posta pari a fI . In definitiva la componente x di velocità può essere calcolata direttamente dalla: ux = λ fD 2sen(θ 2 ) nota la frequenza Doppler. (1.8) CAPITOLO 1 – MISURE DI FLUSSO 23 Il sistema di lenti atto alla separazione del raggio laser viene detto beamsplitter ed indicato con BS, la schematizzazione dell’intero apparato è riportato nella figura seguente. Figura 1.9 Sistema LDA provvisto di BS per la separazione del raggio laser 1.5.3 Calibrazione intrinseca del sistema Il principio di misura del sistema LDA è basato sulla relazione: Vx = d f ⋅ f d (1.9) dove fd rappresenta la frequenza Doppler e df la distanza tra le frange. La df è funzione della distanza tra i due raggi e la lente anteriore e della lunghezza focale della lente, ed è espressa come: df = λ 2sen(θ 2) (1.10) CAPITOLO 1 – MISURE DI FLUSSO 24 dove i simboli hanno i significati già noti. Dunque il fattore di calibrazione è costante ed è intrinsecamente determinato dal sistema ottico, da ciò ne consegue che il sistema LDA non necessita di calibrazione fisica a priori. 1.5.4 Modello di frange Quando due raggi laser si intersecano, sì avrà un’interferenza in una porzione di spazio detta volume di interferenza. Se l’intersezione avviene nelle rispettive gole, dove i fronti d’onda sono piani, si avranno dei piani di luce ed ombra, tali piani prendono il nome di frange e la distanza tra essi è espressa dalla (1.10). Figura 1.10 Formazione di Frange al punto di intersezione dei due raggi CAPITOLO 1 – MISURE DI FLUSSO 25 Le frange sono orientate ortogonalmente all’asse x, ciò spiega la proporzionalità tra la df e la componente x di velocità evidenziata dalla (1.8). Se i raggi non si intersecano nei rispettivi punti di gola, i fronti d’onda saranno curvi, e la distanza tra le frange non sarà costante, ma dipenderà dalla posizione del volume di intersezione. L’intersezione dei due raggi determina anche un altro aspetto fondamentale del sistema LDA, ovvero il volume di misura. Tale grandezza è definita come quel volume dove il passo di modulazione è maggiore di e-2 volte il valore di picco. Come già detto la distribuzione dell’intensità del raggio è di tipo gaussiano da cui consegue che per la definizione precedente il volume di misura è un ellissoide. Figura 1.11 Volume di misura del sistema LDA La lunghezza δz è espressa dalla relazione [10]: δz = 4 Fλ πEDL sen(θ 2) (1.11) CAPITOLO 1 – MISURE DI FLUSSO 26 dove F è la lunghezza focale della lente, E il fattore di espansione del raggio e DL è lo spessore iniziale del raggio (e-2). Il fattore di espansione del raggio viene comunemente utilizzato per aumentare la distanza tra i due raggi, i motivi di questo accorgimento saranno spiegati in seguito. Un esempio di espansione del raggio è riportata di seguito. Figura 1.12 Utilizzo del beam-Expander al fine di aumentare la distanza di separazione dei raggi Un parametro importante è il numero di frange : Nf = ( 2) 8 F tan θ πEDL (1.12) questo parametro è applicato per le particelle inseminanti, in moto lungo la direzione x, verso il centro del volume di controllo. Se una particella attraversa la periferia del volume di controllo, ci saranno meno frange, e si avranno quindi meno periodi per valutare la frequenza doppler. Per un buon settaggio del sistema si deve assicurare un numero di frange compreso tra 10 e 100, anche se in taluni casi possono essere ottenuti buoni risultati anche con un minor numero di frange. Questo dipende CAPITOLO 1 – MISURE DI FLUSSO 27 dall’elettronica utilizzata per determinare la frequenza. Di norma l’accuratezza aumenta all’aumentare del numero dei periodi, anche se i moderni processori FFT (Fast Fourier Transform) assicurano comunque una buona accuratezza anche con un solo periodo. 1.5.5 Configurazioni tipiche del sistema Le configurazioni del sistema LDA si differenziano dalla posizione del ricevitore. In quella di tipo di tipo back-scattering il ricevitore è posizionato vicino l’emettitore mentre in quella forward-scattering in opposizione. Uno schema tipico della configurazione back-scattering è riportato in figura. Figura 1.13 Schema e componenti della configurazione back-scattering CAPITOLO 1 – MISURE DI FLUSSO 28 La configurazione back-scattering permette di assemblare ricevitore ed emettitore in un’unica componente, rendendo il sistema più compatto e maneggevole, per tale motivo spesso è preferita a quella di tipo forwardscattering. Va comunque precisato che il sistema che vede il ricevitore opposto all’emettitore non è del tutto obsoleto, ma viene utilizzato in casi particolari, ad esempio: • quando si intende migliorare il rapporto tra segnale e rumore; • con flussi ad alta velocità, che richiedono particelle inseminanti molto piccole, le quali stanno nel volume di controllo per un tempo limitato e ricevono solo una piccola quantità di fotoni; • nei fenomeni di transizione, quando è necessario collezionare molti dati in brevi istanti di tempo; • in flussi a bassa turbolenza, dove le fluttuazioni verrebbero nascoste dal rumore, se misurate nella configurazione backscattering. Un altro tipo di configurazione più raramente utilizzata è quella di tipo off-axis, ovvero il ricevitore viene posizionato in modo da formare una angolo con il volume di misura. La figura 1.11 mostra come nel volume di misura δz sia la dimensione predominante, Questo fa sì che le due configurazioni precedenti siano sensibili ai gradienti di velocità presenti nel volume di controllo; quando però si ha la necessità di ovviare a questo inconveniente, per motivi di disturbo della misura, viene utilizzata appunto la configurazione off-axis che permette la riduzione del volume di misura, figura 1.14. CAPITOLO 1 – MISURE DI FLUSSO 29 Figura 1.14 Riduzione del volume di misura attraverso la configurazione off-axis 1.5.6 Ottica Nei moderni sistemi LDA, sia la luce emessa che quella riflessa dalle particelle viene trasmessa attraverso fibre ottiche. Questo, oltre a diminuire notevolmente le dimensioni della sonda, figura 1.15, rende il sistema molto flessibile e compatto, adatto a esperimenti pratici. Figura 1.15 Sonda LDA con fibre ottiche Solitamente si tende a ridurre il volume di misura il più possibile, la dimensione può essere espressa come: CAPITOLO 1 – MISURE DI FLUSSO df = 30 4 Fλ πEDL (1.12) la lunghezza d’onda λ del laser è fissata, la lunghezza focale è limitata dalla geometria, quindi considerata costante, il diametro del raggio in corrispondenza della gola DL è anch’esso costante, quindi l’unico parametro su cui agire per poter diminuire df rimane il fattore di espansione E. Quando non è installato l’expander E assume valore unitario, altrimenti il valore di E è maggiore dell’unità; i vantaggi dell’expander sono i seguenti: • riduce il volume di misura ad una data distanza; • migliora il rapporto rumore-segnale ad una data distanza; • aumenta la distanza di misurazione senza peggiorare il segnale. 1.5.7 Cella di Bragg Un inconveniente del sistema LDA si presenta quando si ha a che fare con componenti negative di velocità, che producono frequenza negativa. Il ricevitore non è in grado di distinguere il segno della frequenza, quindi si hanno ambiguità sul segno della velocità della particella. CAPITOLO 1 – MISURE DI FLUSSO 31 Per ovviare a tale problema viene inserita la Cella di Bragg sul percorso di uno dei raggi laser. Le cella di Bragg è costituita da un blocco di vetro; una sua schematizzazione è riportata in figura. Figura 1.16 Schematizzazione delle operazioni della Cella di Bragg. Da un lato un trasduttore elettromeccanico guidato da un oscillatore, produce un’onda acustica, la cui propagazione attraverso il blocco genera un modello di alta e bassa densità. Dall’altro lato la forma è sagomata in maniera tale da minimizzare le riflessioni dell’onda sonora, ed il materiale è ricoperto da un assorbitore di energia acustica. In definitiva la cella di Bragg somma un’ulteriore frequenza f0 , in modo da ottenere: fD ≅ f0 + ( 2 )u 2 sen θ λ x una rappresentazione della (1.13) è riportata di seguito. (1.13) CAPITOLO 1 – MISURE DI FLUSSO 32 Figura 17 Risoluzione dell'ambiguità di velocità mediante lo spostamento in frequenza Finché la velocità non introduce una frequenza negativa di modulo maggiore di f0 , la cella di Bragg assicura una frequenza Doppler positiva. In altre parole l’addizione di una frequenza f0 permette di misurare velocità al di sotto di : ux > − λf 0 2 sen(θ 2 ) (1.14) senza ambiguità direzionale. In normali applicazione valori di f0 pari a 40 Hz, λ 500 nm, θ = 20°, permettono di misurare valori di velocità al di sopra di -57,6 m/s. Per quanto riguarda il limite superiore di velocità, esso è limitato dal tempo di risposta del fotomultimetro e dall’elettronica. Nei moderni sistemi LDA tale massimo è nel regime di velocità supersonico CAPITOLO 1 – MISURE DI FLUSSO 1.5.8 33 Analisi del segnale Il primo risultato dell’anemometria laser è una corrente pulsante prodotta dal fotorilevatore. Questa corrente contiene la frequenza direttamente legata ai valori di velocità misurata, ma contiene anche rumore proveniente da varie fonti: • Rumore proprio del fotorilevatore. • Rumore dell’elettronica secondaria. • Rumore termico proveniente dal circuito di preamplificazione • Rumore ottico. • Luce riflessa da fonti esterne al volume di controllo, vetro graffiato, sporcizia. • Luce riflessa da finestre, lenti, specchi, ecc. La fonte primaria di rumore è proprio quella del fotorilevatore. L’interazione tra il campo ottico o il materiale fotosensibile è un processo quantico, che inevitabilmente crea delle fluttuazioni sulla componente media della corrente. Oltre a ciò esiste un’altra corrente media causata da luce indesiderata che giunge al fotorilevatore, per questo motivo sono in atto grandi sforzi progettuali atti a ridurre queste componenti non gradite di luce. Una precauzione utilizzata per ridurre il rumore consiste nello scegliere la banda minima di misurazione, ovvero scegliendo il range di velocità in cui si andrà ad operare e d utilizzare dei filtri passa-alto e passa-basso per tagliare le altre frequenze. Un altro aspetto fondamentale per una buona analisi del segnale è il numero di particelle presenti simultaneamente nel volume di misura. Se CAPITOLO 1 – MISURE DI FLUSSO 34 mediamente in tale volume è presente meno di una particella si parla di segnale Doppler di tipo “burst” , un segnale del genere è riportato in figura. Figura 18 Segnale Doppler burst Nella figura successiva viene mostrato il segnale filtrato, l’inviluppo della corrente doppler modulata rispecchia la distribuzione gaussiana di intensità nel volume di misura. Figura 19 Segnale Doppler Burst filtrato CAPITOLO 1 – MISURE DI FLUSSO 35 Se nel volume di misura sono presenti più particelle simultaneamente, si parla di segnale multi-particella. La corrente rilevata è la somma delle singole correnti prodotte dalle particelle presenti nel volume di misura, ma essendo le particelle disposte in modo random nello spazio, le fasi delle correnti vengono sommate in modo random, generando delle fluttuazioni di fase. Queste oscillazioni di fase danno origine a rumore, che è difficile eliminare. Per stimare la frequenza Doppler del rumore, viene effettuata una analisi nel dominio delle frequenze.
Scaricare