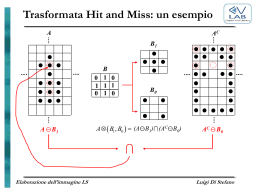
Reti e Sistemi per l‟Automazione Motion Control Stefano Panzieri Motion Control - 1 Stefano Panzieri Sensori per il Motion Control ◊ Posizione ◊ Potenziometri, Encoder, Resolver, Trasformatore Differenziare Lineare (LVDT) Reti e Sistemi per l‟Automazione ◊ Velocità ◊ Encoder, Dinamo Tachimetrica ◊ Forza/Coppia ◊ celle di carico, torsiometri, sensori di forza/coppia ◊ Accelerazione ◊ accelerometri Stefano Panzieri Motion Control - 2 Stefano Panzieri Reti e Sistemi per l‟Automazione Potenziometri ◊ Misurano la rotazione o lo spostamento lineare grazie ad un cursore su un deposito resistivo ◊ Sfruttano il principio del partitore resistivo Rotativi Lineari Stefano Panzieri Motion Control - 3 Stefano Panzieri Encoders Reti e Sistemi per l‟Automazione ◊ Misurano rotazioni relative ed assolute ◊ Possono essere utilizzati anche per misure di velocità Giunto Stefano Panzieri Motion Control - 4 Stefano Panzieri Encoder Relativi Reti e Sistemi per l‟Automazione ◊ Due onde quadre sfasate di 90° consentono di determinare spostamento angolare e direzione della rotazione ◊ Il terzo canale fornisce uno zero di riferimento Stefano Panzieri Motion Control - 5 Stefano Panzieri Encoder Assoluti Reti e Sistemi per l‟Automazione ◊ Ogni posizione viene codificata con n bit (fino a 12/14) ◊ Codifica Gray (varia solo un bit tra due configurazioni adiacenti) ◊ Richiede un numero di sensori maggiore del precedente ma è in grado di determinare una posizione assoluta Stefano Panzieri Motion Control - 6 Stefano Panzieri Encoder Incrementali Lineari ◊ Lo stesso principio dell’encoder incrementale può essere impiegato con un elemento lineare ◊ La lunghezza può anche essere maggiore di un metro Reti e Sistemi per l‟Automazione ◊ La precisione fino al mm Stefano Panzieri Motion Control - 7 Stefano Panzieri Resolver Reti e Sistemi per l‟Automazione ◊ I due avvolgimenti mobili, in quadratura tra di loro, presentano una tensione alternata dipendente dal seno e dal coseno dell’angolo Stefano Panzieri Motion Control - 8 Stefano Panzieri Reti e Sistemi per l‟Automazione Trasformatore differenziale lineare (LVDT) ◊ Misurano lo spostamento lineare sfruttando la variazione dell’accoppiamento magnetico ◊ La risoluzione può essere dell’ordine dei micron, il campo di misura massimo di pochi centimetri Stefano Panzieri Motion Control - 9 Stefano Panzieri Dinamo Tachimetrica Reti e Sistemi per l‟Automazione ◊ Dalla rotazione di un avvolgimento in un campo magnetico si crea una corrente che viene tradotta in una differenza di potenziale Albero sporgente Asse cavo Stefano Panzieri Motion Control - 10 Stefano Panzieri Forza/Coppia ◊ Estensimetri montati su una struttura metallica che si deforma per l’applicazione di forze o momenti Reti e Sistemi per l‟Automazione Cella di carico a tre componenti Torsiometro Stefano Panzieri Motion Control - 11 Stefano Panzieri Accelerazione Reti e Sistemi per l‟Automazione ◊ L’ accelerometro piezoelettrico determina la forza con la quale una massa nota comprime il materiale piezoelettrico stesso Stefano Panzieri Motion Control - 12 Stefano Panzieri Reti e Sistemi per l‟Automazione Motori Elettrici ◊ I motori elettrici impiegati devono rispondere ad alcuni fondamentali requisiti per un buon controllo: complicazione dei circuiti di controllo e di misura, accuratezza nel posizionamento, semplicità, valore della coppia in funzione della velocità. I tipi di motori più usati sono: ◊ I motori in continua (DC) formati da una gabbia di tanti fili che vengono attraversati dalla corrente alternativamente, a seconda del contatto con delle spazzole ◊ I motori passo-passo (stepper) convertono ingressi costituiti da tanti impulsi in altrettanti piccoli movimenti dell‟asse, sfruttando fenomeni di attrazione e repulsione Stefano Panzieri Motion Control - 13 Stefano Panzieri Reti e Sistemi per l‟Automazione Motori Elettrici motore stepper Stefano Panzieri motore brushed Motion Control - 14 motore brushless Stefano Panzieri Reti e Sistemi per l‟Automazione ◊ Convertono impulsi in ingresso in movimenti angolari in uscita, basandosi su principi di attrazione e repulsione. Applicando una tensione, generano coppia ma non generano movimento: per avere movimento ci deve essere un commutatore che inverte la polarità (un motore in continua commuta automaticamente) ◊ Un motore stepper a ciclo aperto, se non pilota carichi eccessivamente grandi a notevoli accelerazioni e non fa estensivo uso di microsteps, può essere una valida alternativa a basso costo per un motore in continua controllato a ciclo chiuso, in quanto il numero di impulsi è un buon indicatore della rotazione Stefano Panzieri Motion Control - 15 Motori stepper Stefano Panzieri Reti e Sistemi per l‟Automazione Motori stepper ◊ Facilità di implementazione di controllori digitali ◊ Elettronica di commutazione piuttosto complessa ma nessun contatto, quindi più resistente ◊ Riscaldamento notevole del motore per le correnti sempre presenti ◊ Ad asse fermo la coppia è massima, diminuisce con la velocità ◊ Possibilità di risonanze, da evitare con tecnologia microstepping (commutando su più avvolgimenti insieme) ◊ Nessun controllore d‟asservimento ◊ Buone prestazioni sull‟errore di posizione ◊ Viene spesso usata una tecnologia chopper per ridurre il tempo di salita Stefano Panzieri Motion Control - 16 Stefano Panzieri Motori Stepper Reti e Sistemi per l‟Automazione ◊ Pro: ◊ Elevata robustezza meccanica ed elettronica ◊ Elevata precisione ◊ Possibilità di raggiungere basse velocità, mantenendo anche coppie elevate ◊ Non hanno bisogno di feedback ◊ Sono in grado di mantenere il carico, sviluppando da fermi una coppia di tenuta anche in assenza di alimentazione ◊ Assenza di spazzole e sovraelongazioni ◊ Contro: ◊ Necessità di elettronica di controllo ◊ Accelerazioni e velocità minori ◊ Problematiche legate alle vibrazioni Stefano Panzieri Motion Control - 17 Stefano Panzieri Reti e Sistemi per l‟Automazione Motori in continua ◊ Sostanzialmente sono costituiti da un rotore messo in un campo magnetico, con una corrente applicata alle armature. Una serie di spazzole interne variano automaticamente il campo magnetico generato dagli avvolgimenti, generando rotazione. La velocità di rotazione è proporzionale alla tensione applicata, la coppia fornita è proporzionale alla corrente assorbita. Sono caratterizzati da alte velocità massime, profili dolci di coppia, intervallo di velocità raggiungibili molto ampio (2-3 ordini di grandezza). Stefano Panzieri Motion Control - 18 Stefano Panzieri Reti e Sistemi per l‟Automazione Motori in continua ◊ Necessità di un tachimetro per chiudere la controreazione, con annessi convertitori A/D e D/A ◊ Facilità di commutazione dovuta all‟uso dei contatti (spazzole) ◊ Le spazzole sono soggette a usura ◊ Pochi rischi di surriscaldamento ◊ La coppia aumenta con la velocità (ad asse fermo la coppia è poca) ◊ Poco rischio di risonanza ◊ Necessità di un controllore dedicato, come un PID ◊ La precisione nell‟asservimento dipende dalle caratteristiche del PID Stefano Panzieri Motion Control - 19 Stefano Panzieri Motori in continua brushed ◊ Pro: Reti e Sistemi per l‟Automazione ◊ Facilità di regolazione ◊ Modello matematico molto semplice ◊ Alte velocità ◊ Contro: ◊ ◊ ◊ ◊ Perdite elettriche e meccaniche dovute alle spazzole Produce scintille ed eccessivo rumore Soggetti a deterioramento Necessità di feedback nel controllo Stefano Panzieri Motion Control - 20 Stefano Panzieri Reti e Sistemi per l‟Automazione Motori Brushless ◊ Un caso particolare di motori controllati in corrente continua, sono i motori brushless: senza spazzole, il meccanismo della commutazione è gestito elettronicamente. ◊ Permettono velocità maggiori, elevate coppie di spunto, rendimento e affidabilità maggiori ◊ L„assenza di contatti fisici semplifica la manutenzione e prolunga la vita operativa del motore. ◊ La potenza fornita genera solo coppia e non campo. ◊ Funzionamento in ambiente ostile ma non in presenza di polveri ferromagnetiche. Stefano Panzieri Motion Control - 21 Stefano Panzieri Motori Brushless Reti e Sistemi per l‟Automazione ◊ Pro: ◊ ◊ ◊ ◊ ◊ ◊ ◊ Assenza di spazzole Dissipazione termica più facile Riduzione del momento di inerzia del rotore Riduzione delle dimensioni Coppie e velocità maggiori (banda passante maggiore) Modello matematico molto semplice (come i motori c.c.) Modulo di alimentazione o in c.c. o in c.a. ◊ Contro: ◊ Necessitano di controllo in controreazione ◊ È più difficile avere coppie costanti Stefano Panzieri Motion Control - 22 Stefano Panzieri Motori lineari Reti e Sistemi per l‟Automazione ◊ Idealmente i motori lineari si possono considerare ottenuti “srotolando” su un piano i motori rotativi. Pertanto i principi fisici alla base del loro funzionamento sono identici a quelli dei convenzionali motori elettrici Stefano Panzieri Motion Control - 23 Stefano Panzieri Azionamenti Industriali ◊ Controllo di posizione ◊ Profili di velocità (trapezoidale, …) ◊ Gearing (movimento a rapporto fisso) Reti e Sistemi per l‟Automazione ◊ Controllo di velocità ◊ Jog (procedere lentamente ma costantemente) ◊ Controllo di forza/coppia ◊ Per avvolgimento controllato o inserimento di parti meccaniche Stefano Panzieri Motion Control - 24 Stefano Panzieri Reti e Sistemi per l‟Automazione Funzionalità Disponibili negli Azionamenti Programmabili ◊ ◊ ◊ ◊ ◊ Configurazione sensori e attuatori Tuning dei Loop Input/Output digitali Input/Output analogici Modalità di Moto ◊ Jog ◊ Move ◊ Gear ◊ Programmazione Stefano Panzieri Motion Control - 25 Stefano Panzieri Loop di velocità Reti e Sistemi per l‟Automazione ◊ Parametri ◊ ◊ ◊ ◊ ◊ Guadagno proporzionale (P) Guadagno integrale (I) Guadagno di accelerazione in feedforward (FF) Banda passante Massima corrente (positiva e negativa) sopportabile dal motore FF Ampl P + I/s Motore velocità - Stefano Panzieri Motion Control - 26 Stefano Panzieri Loop di posizione ◊ Parametri Reti e Sistemi per l‟Automazione ◊ Guadagno proporzionale (Kp) ◊ Guadagno integrale (Ki) ◊ Guadagno del feedforward di velocità (Kff) Kff Kp+Ki/s Stefano Panzieri Motore + loop di velocità Motion Control - 27 1/s posizione Stefano Panzieri Modalità Move ◊ Nella modalità move l’asse viene portato in una posizione predeterminata ◊ Parametri Reti e Sistemi per l‟Automazione ◊ Distanza, Velocità, Accelerazione, Decelerazione ◊ Stato ◊ Idle (in attesa), ◊ Seeking (si sta muovendo) ◊ Locked (bloccato, frenato) profilo trapezoidale di velocità Stefano Panzieri Motion Control - 28 Stefano Panzieri Indexing Reti e Sistemi per l‟Automazione ◊ Possibilità di definire dei profili richiamabili successivamente ◊ Movimenti misti: composti da più index Stefano Panzieri Motion Control - 29 Stefano Panzieri Spostamenti ◊ Incrementale ◊ Movimenti riferiti alla posizione corrente Reti e Sistemi per l‟Automazione ◊ Assoluto ◊ Movimenti riferiti alla posizione di home ◊ Registration ◊ Movimenti riferiti alle posizioni di un marker/tag inserito direttamente nel motore o riconosciuto tramite un sensore digitale Stefano Panzieri Motion Control - 30 Stefano Panzieri Modalità di Jog ◊ La modalità di Jog serve a portare l’asse controllato a una velocità prefissata ◊ Comandi Reti e Sistemi per l‟Automazione ◊ Start/stop, forward/reverse, soft stop ◊ Stati ◊ Stopped (fermato), Forward, Reverse ◊ Parametri ◊ Velocità, Accelerazione, Decelerazione Stefano Panzieri Motion Control - 31 Stefano Panzieri Reti e Sistemi per l‟Automazione Modalità Gear ◊ Nella modalità di gearing l’asse controllato “slave” segue, con un rapporto prefissato, il movimento dell’asse “master” (spesso misurato con un encoder) ◊ Parametri ◊ Rapporto di Gearing Stefano Panzieri Motion Control - 32 Stefano Panzieri Funzionalità Avanzate Reti e Sistemi per l‟Automazione ◊ Rampe dinamiche (trapezoidali, a S, paraboliche) ◊ Autotaratura dei loop ◊ Cambio al volo della modalità di controllo (coppia/velocità/posizione) ◊ Albero elettrico a rapporto variabile ◊ Camme in posizione e tempo ◊ Registrazione data degli allarmi ◊ S.O. real time multitask con priorità programmabili ◊ Sincronizzazioni tra i vari task di movimento ◊ Acquisizione quote al volo (su trigger esterni) ◊ Posizionamenti complessi (traiettorie composte con più assi) Stefano Panzieri Motion Control - 33 Stefano Panzieri Reti e Sistemi per l‟Automazione Graphic Motion Language (GML) ◊ Linguaggio grafico per algoritmi di movimentazione ◊ I blocchi rappresentano ◊ Comandi di moto ◊ Comandi di input/ouput digitale o analogico ◊ Diramazioni condizionate ◊ I link impongono relazioni di precedenza Stefano Panzieri Motion Control - 34 Stefano Panzieri Reti e Sistemi per l‟Automazione Linguaggi di Programmazione Grafici ◊ GML, Labview, … ◊ I linguaggi grafici permettono una programmazione veloce ed intuitiva ◊ Gli schemi prodotti sono spesso autodocumentanti ◊ Le schermate sono context-sensitive e complete di help Stefano Panzieri Motion Control - 35 Stefano Panzieri Inline Bottle Filler ◊ La linea per il riempimento di bottiglie è una tipica applicazione di un sistema di motion control generalmente riferito a una Flying Shear. ◊ Questa applicazione è comune a diverse lavorazioni come il riempimento, il taglio, la punzonatura, lo stampaggio, l‟etichettatura e la stampa. Reti e Sistemi per l‟Automazione ◊ Le applicazioni del Flying Shear richiedono che la lavorazione sia eseguita su di un oggetto mentre questo è in movimento. ◊ Un controllo di Flying Shear deve accelerare da una posizione di stasi per raggiungere la velocità dell‟oggetto in movimento in un punto specifico, e quindi mantenere una sincronizzazione di posizione e velocità mentre la lavorazione è in atto. ◊ Una volta che la lavorazione è completa l‟utensile deve decelerare fino a fermarsi e ritornare alla posizione iniziale (o a quella di home). ◊ Quando un nuovo pezzo si avvicina il processo si ripete. ◊ Il movimento del Flying Shear avviene entro una distanza fissa che non può essere superata, così il controllore deve accelerare, inseguire il pezzo mentre la lavorazione è in atto, e decelerare entro questa distanza garantendo la massima produttività della macchina. Stefano Panzieri Motion Control - 36 Stefano Panzieri Reti e Sistemi per l‟Automazione Vantaggi di un servo-system Il movimento segue automaticamente la velocità della macchina così non è necessario riprogrammare se tale velocità o se il sistema cambia La capacità di interfaccia operatore dell’Ultra 5000 permette veloci set-up e conversioni tra differenti dimensioni e spaziature Accurato e ripetibile, il controllo digitale permette grandi produzioni con il minimo spreco Stefano Panzieri Motion Control - 37 Stefano Panzieri Reti e Sistemi per l‟Automazione Press Feed ◊ In un tipico sistema di Press Feed in cui non siano presenti camme elettroniche, il servo motore guida una serie di rulli che conducono i pezzi verso la pressa. ◊ Un encoder di posizione sul volano della pressa deve monitorare la locazione del meccanismo della pressa (l‟angolazione della pressa) e determinare quando il pezzo può essere inserito nella pressa. ◊ Il sistema deve poter permettere all‟operatore il controllo dell‟entità del movimento. ◊ Per minimizzare il logoramento della macchina e massimizzare la produzione, è desiderabile che il materiale sia immesso nella pressa oltre una fissata percentuale del ciclo di macchina usando degli andamenti dell‟accelerazione non lineari. ◊ Quando la pressa si muove lentamente anche l‟alimentazione dei pezzi deve essere lenta, quando la pressa si muove velocemente altrettanto fa il nastro alimentatore. ◊ La capacità di registrazione è anche richiesta per alcune lavorazioni. ◊ Comunque, in ogni sistema elettronico per il controllo di posizione, c‟è un ritardo tra il punto quando il master encoder genera il comando di movimento per l‟alimentazione, e quando questo effettivamente avviene. ◊ L‟errore che può scaturire da questo ritardo è significativamente influenzato dal tempo di ciclo del sistema e dalla velocità con la quale il motion controller esegue ogni evenienza del programma. Un modo semplice di eliminare questo problema consiste nell‟utilizzo di camme elettroniche. Stefano Panzieri Motion Control - 38 Stefano Panzieri Reti e Sistemi per l‟Automazione Soluzione L’Ultra 5000 con camme permette un’interfaccia operatore personalizzata per un sistema di alimentazione di una pressa. Un profilo elettronico di camma è usato per definire la posizione dei rulli come una funzione del main drive della pressa. Il programma utente può suggerire all’operatore la necessità di alimentazione. Le variabili di programma permettono l’evenienza di cambiamenti facilmente e anche durante l’operazione. Variabili non volatili conservano i dati dell’operatore anche a macchina spenta. Stefano Panzieri Motion Control - 39 Stefano Panzieri Reti e Sistemi per l‟Automazione Rotatory Knife ◊ Sistemi di Rotatory Knife sono ampliamente usati nelle industrie di stampa. Una lama rotante deve andare più o meno veloce a seconda che sia o meno in contatto col pezzo e per far si che il pezzo venga tagliato nella dimensione richiesta. ◊ Un meccanismo di Rotatory Knife consiste in un cilindro con una o più lame posizionate lungo l‟asse longitudinale. Il cilindro ruota e taglia il materiale che gli scorre sotto. ◊ Se la velocità tangenziale della lama raggiunge quella del materiale sul nastro, la lunghezza del materiale tagliato diviene uguale alla circonferenza della lama. Se tale velocità è maggiore saranno prodotti pezzi di dimensioni inferiori, se è minore saranno prodotti pezzi di dimensioni maggiori. ◊ Per ottenere la più alta qualità di taglio possibile e per evitare di danneggiare il materiale sul nastro, la velocità tangenziale della lama deve eguagliare la velocità lineare del nastro nel tempo in cui la lama è a contatto con il materiale da tagliare. ◊ Così, per ottenere tagli più brevi della circonferenza della lama circolare, questa deve girare più velocemente quando non è in contatto col materiale, e poi rallentare per raggiungere la velocità del nastro quando è in contatto. L‟opposto si verifica quando si vogliono ottenere tagli più lunghi della circonferenza della lama. ◊ Per variare la lunghezza dei tagli del materiale, il controllore è costretto a variare la velocità della lama a differenti valori durante la porzione di ciclo quando questa non è in contatto con il materiale. Stefano Panzieri Motion Control - 40 Stefano Panzieri Reti e Sistemi per l‟Automazione Soluzione L’Ultra5000 con camma è usato per controllare un sistema a lama circolare. La presenza della camma fornisce cambiamenti di velocità graduali ed un’esatta sincronizzazione delle velocità quando la lama è in contatto con il materiale. Stefano Panzieri Motion Control - 41 Stefano Panzieri Reti e Sistemi per l‟Automazione Spool Winder ◊ Questa applicazione richiede che il materiale sia asciugato all‟aria ed eventualmente avvolto su un rocchetto. ◊ Sia le dimensioni del materiale, la taglia del rocchetto o il numero di giri richiesti per uno strato determinano la corsa. Questi requisiti fanno sì che il macchinario sia molto specifico. ◊ Un Ultra5000 Intelligent ed un servomotore brushless usato come guida traversa su una winding machine fornirà la flessibilità per compiere una vasta gamma di obiettivi. ◊ Usando un sistema di ingranaggi elettronico, la guida e il rocchetto manterranno una posizione relativa costante, indipendentemente dalla velocità del rocchetto stesso. ◊ ◊ I trasformatori, ad esempio, richiedono spesso molti avvolgimenti con un numero di spire variabili, dipendente dal fatto che sia primario o secondario. La misura del conduttore dipende anche dalla capacità di corrente. ◊ Ultraware mostrerà all‟operatore della macchina informazioni sul processo attraverso un apposito terminale. I calcoli saranno svolti dal programma per determinare quanti strati saranno fatti, il tutto dando come ingresso le dimensioni del materiale, la lunghezza del rocchetto ed il numero di giri richiesto per l‟avvolgimento. ◊ Mentre il rocchetto ruota, la sua posizione è trasmessa al modulo di posizionamento tramite un encoder ottico montato sul mandrino del rocchetto. La guida traversa segue semplicemente il rocchetto mentre viene ruotato, e si fermerà alla fine del rocchetto una volta che questo è pieno per effettuare l‟ultimo giro, se richiesto. Stefano Panzieri Motion Control - 42 Stefano Panzieri Reti e Sistemi per l‟Automazione Vantaggi Fornisce flessibilità, affinché un’ampia gamma di applicazioni di avvolgimento possano essere effettuate dalla stessa macchina senza, o con piccole conversioni. Fornisce accuratezza e consistenza in processi manifatturieri Fornisce una semplice interfaccia operatore con il programma di controllo Stefano Panzieri Motion Control - 43 Stefano Panzieri Flying Shear Reti e Sistemi per l‟Automazione • Questa è una tipica applicazione di motion control in cui il materiale, o il prodotto devono essere processati o tagliati mentre sono in movimento. • Il controllo, in questo caso, deve seguire un punto sul prodotto, accelerare per eguagliare la velocità, e inviare un output per far agire la macchina tagliatrice mentre viene mantenuta la sincronizzazione con la velocità e la posizione tracciata. • Il Flying Shear lavora con una distanza fissata. Quando il processo è completo, il Flying Shear deve decelerare fino ad uno stop e ritornare alla posizione di partenza per il ciclo successivo. • Altre considerazioni potrebbero essere necessarie per limitare il raggio d‟azione del Flying Shear e farlo ritornare alla posizione iniziale in un tempo fissato, in modo da massimizzare il throughput. Stefano Panzieri Motion Control - 44 Stefano Panzieri Reti e Sistemi per l‟Automazione VANTAGGI DI UN SERVO-SYSTEM Il movimento segue automaticamente le velocità della macchina, in questo modo non è necessario riprogrammare se cambia la velocità del sistema. L’interfaccia operatore dell’Ultra5000 permette veloci set-up e cambiamenti di dimensioni e spaziature. Il controllo digitale produce un alto throughput con sprechi minimi Stefano Panzieri Motion Control - 45 Stefano Panzieri
Scaricare