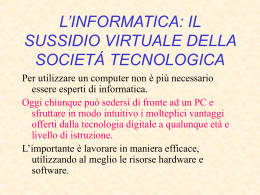
DINAMICA DI SISTEMI AEROSPAZIALI Tema d’esame 08 - 09 - 2014 m, r, J O Cm B Ω h l1 F l2 P R A C x Esercizio 1. Il sistema in figura, posto nel piano orizzontale, è composto da un disco di massa m, raggio r e momento d’inerzia baricentrico J, collegato a terra tramite due aste incernierate alle estremità, di lunghezza rispettivamente pari a l1 e l2 e di massa trascurabile rispetto ad m. Il disco stesso si trova in contatto con una guida circolare di raggio R e centro in C. Applicata al suo centro agisce inoltre una forza F , costante in modulo e direzione. 1.a: Scrivere le espressioni di posizione, velocità e accelerazione del punto B, centro del disco, in funzione della rotazione dell’asta OA, nella condizione in cui a quest’ultima sia imposta una velocità di rotazione costante Ω; 1.b: la coppia motrice Cm necessaria a mantenere le condizioni di moto definite al punto precedente; 1.c: le reazioni scambiate fra disco e guida circolare nel punto di contatto P, nella condizione di moto definita ai punti precedenti. Jm Jd , R Esercizio 2. Un motore elettrico in corrente continua ωu τ, ηd , ηr ωm Cm M caratterizzato da coppia motrice Cm = Ke ia , resistenM T za Ra , tensione di alimentazione ea ed induttanza trascurabile muove, attraverso una trasmissione T i cui rendimenti, rispettivamente di moto diretto e retrogrado, sono ηd e ηr , un disco di raggio R e momento d’inerzia baricentrico Jd . g Sul disco si avvolge una fune inestensibile alla cui estremità è collegata una massa m. Il sistema è posto nel piano vertim cale. Si determinino: 2.a: il momento d’inerzia baricentrico del volano Jm che garantisce all’avviamento in discesa che l’accelerazione di m sia a ≪ g; 2.b: l’intervallo di valori di coppia motrice Cm per cui sussistono condizioni di equilibrio statico; 2.c: le reazioni scaricate al telaio dalla trasmissione nelle condizioni del punto 2.a. Esercizio 3. Il sistema in figura è posto nel piano orizzontale ed è costituito da un pistone di massa mp , mosso da un manovellismo ordinario centrato la cui manovella ha lunghezza r e la biella lunghezza l, con r ≪ l. Entrambe hanno massa trascurabile rispetto alla massa del basamento M . La manovella ruota a velocità costante Ω. Il basamento, è vincolato a traslare in direzione y ed è sospeso da due elementi elastici di pari rigidezza k. mp l k y x r M Ω A k 3.a: Scrivere l’equazione di moto del sistema, semplificando il contributo del sottosistema biella-manovella con una approssimazione del primo ordine; 3.b: determinare l’espressione della forza totale trasmessa dal basamento al telaio; 3.c: disegnare il grafico qualitativo dell’andamento dell’ampiezza di vibrazione della massa M in funzione della velocità angolare Ω della manovella. N.B.: si definisca e si commenti opportunamente qualsivoglia dato ritenuto mancante. Traccia di soluzione. Esercizio 1 Siano AO = ℓ1 eiα (α̇ = Ω, costante), BA = ℓ2 eiβ , BC = (r+R)eiγ , CO = x−ih, con √ x2 + h2 < ℓ1 +ℓ2 +r+R. 1.a) Cinematica del punto B La posizione, velocità e accelerazione del punto B sono date da OB = ℓ1 eiα + ℓ2 eiβ (1) ~vB = iα̇ℓ1 eiα + iβ̇ℓ2 eiβ ~aB = i✓ α̈ℓ1 e iα 2 − α̇ ℓ1 e iα = iΩℓ1 eiα + iβ̇ℓ2 eiβ + iβ̈ℓ2 e iβ 2 − β̇ ℓ2 e iβ 2 = −Ω ℓ1 e iα + iβ̈ℓ2 e (2) iβ 2 − β̇ ℓ2 e iβ (3) Occorre determinare gli angoli α e β e le loro derivate. La chiusura del poligono OABC dà AO + BA = CO + BC (4) ovvero ℓ1 eiα + ℓ2 eiβ = (r + R)eiγ + x − ih (5) in cui le variabili sono α, β e γ. È quindi possibile determinare β e γ in funzione di α. Dalla derivata dell’equazione di chiusura si ricava iΩℓ1 eiα + iβ̇ℓ2 eiβ = iγ̇(r + R)eiγ ovvero ℓ2 sin β −(r + R) sin γ −ℓ2 cos β (r + R) cos γ da cui β̇ γ̇ 1 = ℓ2 (r + R) sin(β − γ) (6) β̇ γ̇ = −ℓ1 sin α ℓ1 cos α Ω (7) (r + R) cos γ (r + R) sin γ ℓ2 cos β ℓ2 sin β −ℓ1 sin α ℓ1 cos α Ω (8) e quindi ℓ1 sin(β − α) γ̇ = Ω r + R sin(β − γ) (9) Analogamente, dalla derivata seconda dell’equazione di chiusura si ricava −Ω2 ℓ1 eiα + iβ̈ℓ2 eiβ − β̇ 2 ℓ2 eiβ = iγ̈(r + R)eiγ − γ̇ 2 (r + R)eiγ ovvero ℓ2 sin β −(r + R) sin γ −ℓ2 cos β (r + R) cos γ β̈ γ̈ =− ℓ1 cos α ℓ1 sin α 2 Ω − (10) ℓ2 cos β ℓ2 sin β 2 β̇ + (r + R) cos γ (r + R) sin γ γ̇ 2 (11) 1.b) Coppia motrice Si consideri il teorema dell’energia cinetica. La velocità del punto B, espressa in funzione del movimento associato al segmento BC, è (r + R)γ̇, diretta tangenzialmente in modo tale che, per γ̇ > 0, il punto B orbita attorno al punto C in senso antiorario. Siccome al contatto in P tra disco e guida la velocità è nulla, per l’ipotesi di puro rotolamento, la velocità angolare del disco φ̇, oraria, è tale per cui rφ̇ = −(r + R)γ̇, ovvero φ̇ = −(1 + R/r)γ̇. L’energia cinetica del sistema è ! 1 1 2 1 R 2 2 2 2 Ec = m(r + R) γ̇ + J φ̇ = γ̇ 2 (12) m(r + R) + J 1 + 2 2 2 r La potenza delle forze attive è Π = Cm Ω − F (r + R) cos γ γ̇ Dal teorema dell’energia cinetica si ricava quindi 2 ! R m(r + R)2 + J 1 + γ̈ γ̇ = Cm Ω − F (r + R) cos γ γ̇ r (13) (14) ovvero ! R 2 ∂γ ∂γ m(r + R) + J 1 + γ̈ = Cm − F (r + R) cos γ , r ∂α ∂α 2 (15) ove ∂γ/∂α = γ̇/Ω. 1.c) Reazioni in P Al contatto in P il disco e la guida si scambiano una reazione che può essere scomposta in componente radiale, N , diretta come ~n (o eiγ ), e tangenziale, T , diretta come ~t = ~k × ~t (o ieiγ ). Si consideri l’equilibrio alla rotazione del solo disco rispetto al proprio centro: J φ̈ − T r = 0 (16) con T in direzione sudovest nella configurazione del disegno. Si ottiene T = J φ̈ r (17) Si consideri ora l’equilibrio alla rotazione dell’insieme disco e asta BA rispetto alla cerniera in A: =0 J φ̈ + ~k · PA × ~nN + ~tT + BA × ~jF − m~aB (18) da cui, essendo T nota, si ricava N . Esercizio 2 La potenza motrice è Πm = (Cm − Jm ω̇m ) ωm Ke ea − ωm − Jm ω̇m ωm = Ke Ra Ra (19) La potenza dell’utilizzatore è Πu = (Cu − Ju ω̇u ) ωu = mgR − Jd + mR2 ω̇u ωu = τ mgR − τ 2 Jd + mR2 ω̇m ωm (in quanto, stando al disegno, per ωu > 0 il peso scende). (20) 2.a) Dimensionamento volano All’avviamento in discesa il moto è retrogrado; ne consegue che la potenza fluisce dall’utilizzatore al motore, quindi Ke ea 2 ✟ Ke − ω − J ω̇ Jd + mR2 ω̇m ✟ ω✟ ω✟ (21) m m m ✟ m + ηr τ mgR − τ m =0 ✟ Ra Ra da cui Jm + ηr τ 2 Jd + mR2 ω̇m = Ke ea + ηr τ mgR Ra (22) Perché il moto sia effettivamente retrogrado, l’accelerazione deve essere positiva, in modo tale per cui la massa inizia a scendere e quindi la potenza del peso della massa è positiva; questo accade se ea > −ηr τ mgRRa /Ke . L’accelerazione allo spunto è a = τ Rω̇m Ke ea + ηr τ mgR Ra = τR Jm + ηr τ 2 (Jd + mR2 ) (23) perché sia a ≪ g si deve avere Ke ea + ηr τ mgR Ra ≪g τR Jm + ηr τ 2 (Jd + mR2 ) ! Ke τR ea + ηr τ mgR ≪ g Jm + ηr τ 2 Jd + mR2 Ra ! 1 Ke τR ea + ηr τ mR ≪ Jm + ηr τ 2 Jd + mR2 g Ra ! 1 Ke Jm ≫ τ R ea + ηr τ mR − ηr τ 2 Jd + mR2 g Ra Jm ≫ τ R Ke ea − η r τ 2 J d g Ra (24) (25) (26) (27) (28) 2.b) Equilibrio statico Si ha equilibrio statico per moto incipiente verso il basso quando il sistema è in condizione di moto retrogrado incipiente, Cm✟ ω✟ ω✟ m + ηr τ mgR✟ m =0 (29) ovvero Cm = −ηr τ mgR (30) Si ha equilibrio statico per moto incipiente verso l’alto quando il sistema è in condizione di moto diretto incipiente, ω✟ ω✟ ηd Cm✟ m =0 m + τ mgR✟ (31) ovvero Cm = − 1 τ mgR ηd (32) Quindi si ha equilibrio statico per − 1 τ mgR < Cm < −ηr τ mgR ηd (1/ηd > ηr dato che 0 ≤ η ≤ 1). (33) 2.c) Reazioni scaricate dalla trasmissione La trasmissione riceve da un lato la coppia motrice Cm e dall’altro la coppia dell’utilizzatore, Cu . Quest’ultima in condizioni di avviamento vale Cu = mgR − (Jd + mR2 )ω̇u . La coppia motrice invece è Cm = Ke ia − Jm ω̇m . La coppia complessiva Ct scaricata sui supporti dalla trasmissione è quindi Ct = Cm + Cu (34) quindi vale Ct = Ke ia − Jm ω̇m + mgR − (Jd + mR2 )ω̇u = Ke ia + mgR − (Jm + τ (Jd + mR2 ))ω̇m (35) Esercizio 3 La distanza tra il pistone e il punto A è u; detto α l’angolo di manovella, e β quello di biella, l’equazione di chiusura dà u = r cos α + ℓ cos β r sin α = ℓ sin β da cui è immediato ricavare sin β = (r/ℓ) sin α e quindi r r 2 u = r cos α + ℓ 1 + sin2 α ℓ Considerando un’approssimazione del primo ordine si ottiene p u = r cos α + ℓ 1 + ε2 ∼ = r cos α + ℓ (36) (37) (38) (39) 3.a) Equazione di moto Detto z lo spostamento del basamento, lo spostamento assoluto del pistone è zp = z + r cos α + ℓ. La sua derivata è żp = ż − Ωr sin α. L’energia cinetica del sistema è 1 1 Ec = mp (ż − Ωr sin α)2 + M ż 2 2 2 (40) L’energia potenziale è 1 Ep = 2 · kz 2 2 (41) La corrispondente equazione di Lagrange di secondo tipo è ∂Ec = mp (ż − Ωr sin α) + M ż ∂ ż d ∂Ec = (mp + M ) z̈ − mp Ω2 r cos α dt ∂ ż ∂Ec =0 ∂z ∂Ep = 2kz ∂z Qz = 0 (42) (43) (44) (45) (46) da cui (mp + M ) z̈ + 2kz = mp Ω2 r cos α (47) 3.b) Forza totale trasmessa a terra La forza trasmessa a terra è f = 2kz; la si ricava determinando la soluzione a regime z = Z cos(Ωt), dato che α = Ωt, quindi −Ω2 (mp + M ) + 2k Z = mp Ω2 r (48) e Z= mp Ω2 r 2k − Ω2 (mp + M ) (49) quindi la forza trasmessa è f= 2kmp Ω2 r cos(Ωt) 2k − Ω2 (mp + M ) (50) e il suo massimo è fmax = 2kmp Ω2 r 2k − Ω2 (mp + M ) (51) 3.c) Diagramma dello spostamento Per Ω = p 0 lo spostamento è nullo; cresce inizialmente circa parabolicamente; tende ad un asintoto verticale per Ω = 2k/(M + mp ); infine, per Ω → ∞ tende a −r/(1 + M/mp ).
Scaricare