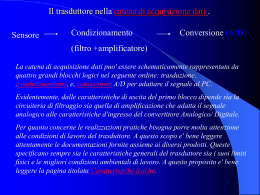
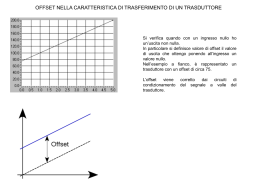
Terminologia e definizioni generali L’obiettivo di un sistema di misura è quello di fornire al sistema di controllo un’indicazione sullo stato di un sistema fisico. Il modo più semplice per misurare una grandezza è quello di eseguire un confronto con un campione predefinito. M lt spesso il metodo Molto t d di misura i diretta di tt per confronto f t non è in i pratica ti applicabile, li bil in i tal t l caso è necessario i eseguire una misura indiretta, trasformando la grandezza da misurare in un’altra più facilmente confrontabile con un campione. La misura indiretta richiede un elemento, il sensore, che modifica la natura fisica della grandezza da misurare producendo un segnale (in genere elettrico) univocamente legato alla grandezza iniziale, ma più adatto ad eseguire le operazioni di confronto e di elaborazione della misura. Terminologia e definizioni generali La definizione di sensore data dall’ International Electrotechnical Commission (IEC) è: “L’ l “L’elemento t primario i i di una catena t di misura i che h converte t la l variabile i bil d’ingresso d’i in i un segnale l adatto d tt alla ll misura” i ” Terminologia e definizioni generali La definizione di trasduttore data dall’ International Electrotechnical Commission (IEC) è: “Dispositivo che accetta un’informazione nella forma di una variabile fisica (variabile d’ingresso) e la trasforma in una variabile d’uscita della stessa o di diversa natura in accordo con una legge nota” Il trasduttore quindi può essere identificato con l’intera catena di misura, mentre il sensore è il primo elemento della stessa catena di misura. In molti casi la distinzione tra sensore e trasduttore non è così netta e molto spesso nella letteratura tecnica e nella pratica comune i due termini sono utilizzati come sinonimi. sinonimi Terminologia e definizioni generali Le grandezze fisiche oggetto di misura da parte dei trasduttori possono essere classificate in: grandezze continue, che possono assumere valori continui all’interno di un certo intervallo (es. temperatura di un utensile, utensile velocità di rotazione di un motore motore, ecc ecc...). ) grandezze discrete, che assumono un insieme discreto di valori (es. verso di rotazione di un motore, numero di pezzi lavorati al minuto, ecc...). Le informazioni associate alle grandezze fisiche sono dette segnali. • • le grandezze continue sono descritte da segnali analogici. [ li logici, l i i nell caso sii abbiano bbi due d valori l i segnali ammissibili le grandezze discrete sono descritte da: segnali codificati, se il numero di valori ammissibili è superiore a due Terminologia e definizioni generali Il principio di funzionamento di un sensore è basato su una legge fisica nota che regola la relazione tra la grandezza fisica da misurare e una grandezza elettrica d’uscita. Un esempio di sensore è la termoresistenza (sensore di temperatura). La resistività si modifica al variare della temperatura. ρ R= ρ = ρ 1 (1 + αΔθ ) ρ 1 ϑc Vm l =ρ I ref S ϑ1 ϑ Δθ = ρ − ρ 1 R − R1 = αρ 1 αR1 Per poter acquisire il segnale occorre fornire una corrente (o una tensione) e misurare poi la tensione (corrente) generata. Classificazione dei sensori • In base alla grandezza da misurare • In base al principio fisico utilizzato Classificazione dei sensori • In base alle caratteristiche energetiche: ♦Sensori attivi: convertono direttamente l’energia dell’ ingresso in energia di uscita, senza l’ ausilio di sorgenti esterne. ♦Sensori passivi: richiedono energia dall’ esterno (eccitazione) per la conversione. Classificazione dei sensori • In base al tipo di segnale che forniscono: • sensori analogici: forniscono un segnale elettrico continuo a risoluzione infinita, l’uscita cioè può assumere infiniti valori all’interno di un dato intervallo. • sensori digitali: forniscono una informazione di tipo numerico con risoluzione finita, l’uscita cioè può assumere solo un numero finito di valori all’interno di un dato intervallo. • Sensori logici: hanno una uscita di tipo booleano, codificata usualmente con la cifra “1” (vero, presenza) e “0” (falso, assenza). • Sensori codificati: hanno un’uscita numerica codificata in una stringa di bits. Errori di acquisizione del segnale L’ L’operazione i di acquisizione i i i del d l segnale l da d parte t di un trasduttore t d tt è inevitabilmente i it bil t affetta ff tt da d errorii dovuti alla non idealità del componente e della catena di amplificazione ed acquisizione del segnale stesso. Si intendono per errori le cause che fanno si che l’indicazione della misura non corrisponda esattamente alla grandezza da misurare. Gli errori possono essere classificati come: • Errori sistematici - Un errore è sistematico se, fissate le condizioni sperimentali, in grandezza e segno ha la stessa influenza sul risultato della misura. • Errori casuali - Errori la cui influenza sulla misura può cambiare in grandezza e segno se si ripete la procedura di misurazione misurazione. (Le condizioni ambientali sono sorgenti di errori casuali se non vengono monitorate o se non si conosce la loro influenza sulla grandezza da misurare, diversamente possono essere sorgenti di errore sistematico). • Errori grossolani - Errori che riguardano l’operatore o guasti dello strumento. Caratteristiche metrologiche dei trasduttori. Le caratteristiche di funzionamento dei trasduttori possono essere raggruppate in tre categorie. • Caratteristiche statiche - Si riferiscono a condizioni di funzionamento in cui viene variata molto lentamente la variabile di ingresso del sensore, registrando la corrispondente variabile di uscita. • Caratteristiche dinamiche - Se la variabile di ingresso varia velocemente l’uscita può evidenziare un’attenuazione rispetto alla caratteristica statica ed un ritardo. La caratteristica dinamica del trasduttore pone un limite alla banda passante di tutto il sistema di controllo. • Specifiche statistiche ed ambientali - E’ praticamente impossibile realizzare un dispositivo che operi per un tempo illimitato illimitato, mantenendo costanti le proprie caratteristiche e il cui funzionamento non venga influenzato da altre grandezze fisiche oltre quella misurata. Ad esempio la temperatura o l’umidità. Specifiche statiche Range di ingresso e d’uscita Linearità Errore di offset Errore di soglia Errore di guadagno Errore di isteresi Risoluzione Sensibilità Precisione Accuratezza Deriva Caratteristica statica La caratteristica statica di un trasduttore è definita da una funzione del tipo: dove il segnale X rappresenta il segnale di ingresso e Y il segnale di uscita dal trasduttore. La caratteristica è definita su di un intervallo finito chiamato campo di ingresso avente estremi Xm e XM ed ha valori sul campo di uscita (output range o span) con estremi Ym e YM. Si definiscono: Range d’ingresso: Xs = XM - Xm Range d’uscita: Ys = YM - Ym E’ necessario selezionare opportunamente i range d’ingresso E d ingresso e d’uscita d uscita del trasduttore in funzione rispettivamente dei valori assunti dalla grandezza da misurare e delle specifiche del sistema di calcolo, per assicurare livelli ottimali di sensibilità e risoluzione ed evitare danni al trasduttore. Caratteristica statica La caratteristica statica di un sensore deve avere idealmente un andamento lineare. La costante di proporzionalità fra valori di ingresso e di uscita viene chiamata guadagno (K) del trasduttore. I trasduttori commerciali hanno una caratteristica statica reale che si differenzia da quella ideale a causa di inevitabili imperfezioni costruttive. La qualità di un sensore si misura in base a quanto la caratteristica reale si scosta da quella ideale. Linearità La linearità di un trasduttore può essere definita in diversi modi, non del tutto equivalenti. Secondo la definizione rigorosamente matematica, un sistema é lineare se la sua caratteristica soddisfa le proprietà additiva ed omogenea, vale a dire se la sua caratteristica Y = f(X) soddisfa la seguente eguaglianza: Per un trasduttore lineare la relazione tra la g grandezza descrivibile attraverso una semplice relazione matematica: essendo K il guadagno del trasduttore. fisica misurata e il segnale g in uscita è Errore di linearità L’errore di linearità è la massima deviazione dell’uscita del trasduttore rispetto alla caratteristica lineare che approssima al meglio la caratteristica reale Errore di linearità Tale caratteristica lineare viene normalmente ottenuta secondo il metodo dei minimi quadrati, cioè si cerca quella retta r(X) che minimizzi la quantità: Indicando con ΔY il massimo scostamento dalla caratteristica lineare, l’errore percentuale di non linearità vale: Errore di Offset L’errore di Offset (o di fuori zero) è il valore d che assume l’uscita del trasduttore (Yo) quando la grandezza da misurare è nulla. Errore di Offset La caratteristica di un trasduttore con offset non è lineare, anche se è definita tramite una retta, infatti, se si considerano due grandezze fisiche in sequenza X1 e X2 , la lettura della grandezza pari alla somma di X1 e X2 : è differente rispetto alla somma delle letture del trasduttore: Per rendere lineare la caratteristica occorre eliminare il termine di “offset” d dalla caratteristica del trasduttore: Errore di soglia L’errore di soglia corrisponde al più basso livello di segnale rilevabile dal sensore. Esso non sempre coincide con lo zero della grandezza da misurare. Per rendere lineare la caratteristica occorre eliminare il termine di “soglia” s dalla caratteristica del trasduttore: Errore di guadagno L’errore di guadagno è la differenza tra il guadagno della caratteristica ideale del trasduttore (K) e il guadagno della retta (K1) che approssima al meglio la caratteristica reale del trasduttore. L’errore di guadagno è solitamente espresso in percentuale: Errore di isteresi Il fenomeno dell’isteresi si manifesta nel caso in cui la caratteristica del trasduttore risulta differente nella situazione in cui la grandezza da acquisire risulta crescente rispetto al caso in cui sia decrescente. L’errore di isteresi è la massima differenza tra le uscite del trasduttore a parità di grandezza in ingresso, valutate in un primo caso per valori crescenti e in un secondo per valori decrescenti. Campionamento e Quantizzazione Il calcolatore di processo opera su dati numerici è quindi necessario trasformare il segnale analogico da misurare in una sequenza di valori numerici. Ciò viene fatto automaticamente dai sensori digitali codificati mentre è necessario utilizzare un sistema di conversione analogico/digitale nel caso di sensori analogici. Un segnale analogico ha la caratteristica di essere continuo nel tempo ed assumere valori continui all’interno di un certo intervallo. Campionamento e Quantizzazione Il calcolatore di processo impiega un certo intervallo di tempo per elaborare i segnali di ingresso, ingresso e quindi non può seguire l’evolversi continuo del segnale analogico, ma dovrà acquisire campioni del segnale analogico ad istanti discreti di tempo. Questa operazione viene detta campionamento del segnale. Campionamento e Quantizzazione Il segnale campionato assume valori continui, e quindi teoricamente infiniti, mentre il calcolatore può rappresentare un numero finito di valori in base alla massima dimensione di parola rappresentabile dall’unità dall unità aritmetica. aritmetica Occorre eseguire una operazione di approssimazione del valore campionato al più vicino valore rappresentabile dal calcolatore. Tale operazione viene detta quantizzazione del segnale. Errore di Quantizzazione L’informazione associata alla grandezza analogica campionata e quantizzata viene detta segnale digitale. • L’operazione di campionamento non produce in via teorica un degrado dell’informazione associata al segnale (se si rispettano le condizioni del teorema del campionamento), • L’operazione di quantizzazione comporta inevitabilmente l’introduzione di un errore sul segnale acquisito. Se YM e Ym sono rispettivamente il massimo ed il minimo valore assunto dal segnale Y in uscita dal trasduttore, l’intervallo di valori Ys che l’uscita Y può assumere (output range o span), è dato da: Rappresentando il segnale di uscita del trasduttore Y mediante una codifica binaria a N bits (quantizzazione), ogni singolo bit corrisponde ad un valore detto LSB (o “bit meno significativo”) pari a: Errore di Quantizzazione L’LSB corrisponde al valore minimo rappresentabile dalla codifica digitale, viene anche chiamato quanto e rappresentato dal simbolo q. A causa della quantizzazione, quantizzazione tutti i valori di Y compresi all’interno di un LSB sono rappresentati da una unica codifica digitale Yd, e quindi l’errore di quantizzazione è pari a: Errore complessivo Tutte le possibili sorgenti di errore vanno considerate nella valutazione dell’errore complessivo sul segnale d’uscita del trasduttore: L’errore sul segnale in uscita del trasduttore non è significativo se rimane inferiore all’errore di quantizzazione, cioè se: Risoluzione e Sensibilità La risoluzione di un trasduttore è pari all’errore di quantizzazione e corrisponde alla più piccola quantità che può essere misurata; ovvero alla minima variazione dell'ingresso che provoca un'apprezzabile variazione in uscita. L sensibilità La ibilità di un trasduttore t d tt è d definita fi it come la l massima i variazione i i dell’uscita d ll’ it rapportata t t alla ll massima variazione dell’ingresso: Occorre porre attenzione a non confondere la risoluzione e la sensibilità di un trasduttore. La definizione di sensibilità non tiene conto del segnale minimo o dalla minima variazione di segnale misurabile, informazione che invece è contenuta nella definizione di risoluzione. Precisione ed Accuratezza Può accadere che ripetendo lo stesso esperimento più volte il sensore non fornisca l’identico risultato. La precisione di un trasduttore è una misura di quanto la sua uscita sia ripetibile su ripetuti esperimenti. La precisione di un sensore è indicata fornendo un intervallo di errore massimo (± errore), oppure una percentuale di errore rispetto al campo di uscita: dove eMAX rappresenta la variazione massima di lettura del trasduttore in corrispondenza dello stesso valore della grandezza misurata. Precisione ed Accuratezza L’accuratezza è una misura di quanto l’uscita del trasduttore si scosta da quella che dovrebbe essere l’uscita ideale, cioè quella uscita che avrebbe un trasduttore ideale che misurasse la stessa grandezza di quello reale. L’accuratezza viene espressa in percentuale rispetto al valore ideale: Precisione ed Accuratezza L’accuratezza non va confusa con la precisione: l’accuratezza ci fornisce un indice di quanto il trasduttore dia una indicazione fedele al valore vero della variabile che si vuole misurare, la precisione ci fornisce una misura di quanto l’uscita del sensore sia ripetibile. La distinzione tra errori sistematici ed errori casuali si riflette sulla distinzione tra accuratezza e precisione. i i L’accuratezza è influenzata da tutti gli errori, La precisione è influenzata solo dagli errori casuali (quelli sistematici non contribuiscono infatti alla variazione dei risultati). Precisione ed Accuratezza Preciso - Non accurato Non preciso - Accurato Preciso - Accurato Non preciso - Non accurato Deriva Si definisce deriva la possibile variazione nel tempo della caratteristica statica di un sensore (staratura). Si può verificare sia una deriva di zero che una deriva di sensibilità. Nel primo caso si ha lo spostamento verticale della caratteristica d’uscita, nel secondo cambia il coefficiente angolare.
Scaricare