ALMA MATER STUDIORUM - Università di Bologna SECODA FACOLTÀ DI INGEGNERIA CON SEDE A CESENA CORSO DI LAUREA SPECIALISTICA in Ingegneria Meccanica classe 36/S Sede di Forlì TESI DI LAUREA in Disegno Tecnico Industriale Studio e ottimizzazione di un carrello per una macchina avvolgitrice Candidato: Relatore: Chiar.mo ILARIA ROCCHI Prof. LUCA PIANCASTELLI Correlatori: Prof. Ing. ALESSANDRO CERUTI Prof. Ing. TIZIANO BOMBARDI Anno accademico 2010-2011 Sessione III Indice Indice Capitolo 1 Introduzione pag. 1 1.1 Premessa pag. 1 1.2 Il caso in studio pag. 2 Capitolo 2 Descrizione dei macchinari pag. 5 2.1 Silver Go pag. 5 2.2 Silver Twin pag. 8 2.3 Il carrello porta bobina pag. 11 Capitolo 3 Il carrello pag. 13 3.1 Componenti pag. 13 3.2 Il film di polipropilene pag. 15 3.2.1 Caratteristiche meccaniche pag. 15 3.2.2 Il prestiro pag. 16 Capitolo 4 Il nuovo sistema di prestiro variabile pag. 19 4.1 Descrizione pag. 19 4.1.1 La trasmissione pag. 19 4.1.2 Scelta del tipo di trasmissione pag. 21 4.2 I variatori di velocità pag. 21 4.3 I variatori meccanici con cinghia trapezoidale pag. 23 4.4 4.3.1 I variatori meccanici pag. 23 4.3.2 I variatori con cinghie pag. 24 La trasmissione con cinghie trapezoidali pag. 26 I Indice 4.4.1 Le cinghie trapezoidali pag. 26 4.4.2 La trasmissione pag. 27 4.5 La trasmissione con cinghie dentate pag. 28 4.5.1 Le cinghie dentate pag. 28 4.5.2 La trasmissione pag. 30 Capitolo 5 Progettazione del nuovo sistema di prestiro pag. 31 5.1 Dati di partenza pag. 31 5.2 Scelta delle pulegge pag. 32 5.3 Dimensionamento delle pulegge pag. 37 5.3.1 1^ trasmissione pag. 37 5.3.2 2^ trasmissione pag. 38 5.3.3 3^ trasmissione pag. 39 5.4 Calcolo del tiro delle cinghie 5.4.1 1^ trasmissione pag. 40 5.4.2 Inizio corsa pag. 40 5.4.3 Fine corsa pag. 42 5.5 Analisi dei problemi pag. 43 5.5.1 1^ trasmissione pag. 43 5.5.2 3^ trasmissione pag. 44 5.5.3 2^ trasmissione pag. 45 5.6 5.7 pag. 40 Studio della riduzione pag. 46 5.6.1 1° caso pag. 46 5.6.2 2° caso pag. 47 5.6.3 3° caso pag. 48 Componenti pag. 49 II Indice 5.8 Masse e ingombri pag. 50 Capitolo 6 Analisi agli elementi finiti pag. 53 6.1 Analisi dei carichi pag. 53 6.2 Le forze in gioco pag. 54 6.2.1 Dati pag. 54 6.2.2 Calcoli delle forze pag. 54 6.3 Risultati pag. 55 Capitolo 7 Conclusioni pag. 59 7.1 Il variatore pag. 59 7.2 Il telaio pag. 60 7.3 Analisi agli elementi finiti pag. 61 7.4 Sviluppi futuri pag. 62 Bibliografia pag. 63 III Capitolo 1 Introduzione Capitolo 1 Introduzione 1.1 Premessa Il pallet è sicuramente l'imballaggio terziario più diffuso per lo stoccaggio, la movimentazione e la distribuzione delle merci; contribuisce a proteggere il prodotto durante il viaggio, facilitandone il trasporto e lo stoccaggio. Il pallet ha avuto, e continua ad avere, un notevole successo come unità di carico per il suo ruolo di collegamento flessibile tra imballaggio, mezzi di movimentazione e trasporto. Da anni il mercato richiede una continua innovazione dei tipi di prodotto offerti e spesso all'interno delle unità di carico pallettizzate vengono caricate diverse tipologie di prodotto, rendendo sempre più difficile sia la protezione, sia il mantenimento della qualità degli articoli. Inoltre le attività di gestione dei rifiuti dell'imballaggio, che comprendono la raccolta, il trasporto, il recupero e lo smaltimento, sono diventate un criterio per la progettazione e la fabbricazione degli imballaggi stessi. Quindi i macchinari che realizzano l'imballaggio finale, costituito dal pallet, dal carico e dal film estensibile che li avvolge, devono tenere conto di numerosi fattori: compatibilità con i sistemi di stoccaggio, di trasporto e di handling; compatibilità con le caratteristiche dei prodotti e degli imballaggi secondari; compatibilità con le operazioni di picking; riduzione della quantità e della nocività dei materiali da imballaggio. 1 Capitolo 1 Introduzione 1.2 Il caso in studio La Silver Go e la Silver Twin, realizzate presso l'azienda Pieri s.r.l. di Cesena, sono macchine automatiche a singolo o doppio braccio rotante progettate per completare il binomio prodotto imballo avvolgendo i pallet con un film estensibile che garantisce solidità al carico. Figura 1.1 - Silver Twin Attualmente il film estensibile viene montato su un carrello porta bobina che permette di realizzare un prestiro meccanico, consentendo un notevole risparmio sul consumo di film. La presente tesi ha avuto come obiettivo principale lo studio e l'ottimizzazione di un nuovo carrello in grado di realizzare un maggiore 2 Capitolo 1 Introduzione prestiro, fino ad un 500%, che fosse anche variabile durante il moto del braccio rotante. Tenendo ben presente i requisiti fondamentali, quali l'affidabilità, la riduzione delle masse, la facilità di manutenzione e, non ultimi, i costi, il lavoro si è concentrato principalmente sui seguenti progetti: dimensionamento delle pulegge variabili e dei riduttori di velocità, con il relativo calcolo degli interassi; progetto del carrello in grado di alloggiare tutti gli organi di riduzione, nel rispetto dei vincoli di spazio; dimensionamento di un attuatore per pilotare a distanza il movimento delle pulegge coniche; calcolo del tiro delle cinghie e delle forze in gioco; verifica del telaio tramite analisi agli elementi finiti. Particolare attenzione è stata posta nella scelta dei diversi componenti: si è cercato, laddove possibile, di utilizzare organi di trasmissione che avessero costi contenuti, che fossero facilmente reperibili e che non richiedessero una manutenzione frequente. Gli strumenti indispensabili di cui si è fatto uso sono stati due sistemi CAD largamente impiegati nel mondo del disegno e della progettazione meccanica: Solid Works®2011 e Solid Edge®v20. Nelle pagine successive saranno forniti i dati tecnici dei macchinari Silver Go e Silver Twin, successivamente verrà descritto il funzionamento del carrello che questi montano e l'importanza del prestiro del film per la realizzazione di un ottimo imballaggio. Dopo aver riportato i calcoli effettuati per la riduzione variabile di velocità, si potrà osservare la modellazione CAD del nuovo carrello. Infine verrà esposta l'analisi agli elementi finiti. 3 Capitolo 1 Introduzione 4 Capitolo 2 Descrizione dei macchinari Capitolo 2 Descrizione dei macchinari 2.1 Silver Go La Silver Go è una macchina in grado di avvolgere pallet di dimensioni minori o uguali a 1200×1200. Ha un telaio principale con struttura a portale che appoggia su quattro colonne ed è realizzato con un tubolare in acciaio saldato. Ha un braccio rotante sempre realizzato con un tubolare in acciaio e guide esterne per lo scorrimento della slitta di supporto del carrello porta bobina. Il movimento rotatorio del braccio è ottenuto con un sistema pignone-ralla dentata comandata da un motoriduttore con motore auto frenante gestito da inverter. La Silver Go integra al suo interno anche i seguenti dispositivi: Top Sheet Cover, ossia un macchinario che viene utilizzato per rilasciare sopra il pallet un foglio di polietilene prima che il pallet stesso venga avvolto, si possa realizzare un imballaggio antipolvere; un sollevatore pneumatico del pallet che consente di ottenere l'avvolgimento parziale della pedana anche con carico debordante o rientrante; un gruppo pressore pneumatico per la stabilizzazione del carico pallettizzato; un dispositivo di taglio e bloccaggio del film con l'inserimento del lembo iniziale e del lembo finale tra le spire già avvolte. Numerosi sono i controlli che prevede questa macchina: la regolazione automatica della massima altezza di avvolgimento, protezioni perimetrali e barriere di sicurezza ottenute mediante opportune fotocellule; un quadro 5 Capitolo 2 Descrizione dei macchinari elettrico di controllo con logica programmabile computerizzata con comandi manuali e spie di indicazione degli allarmi; una tastiera di interfaccia con l'operatore H.M.I. (human machine interface); un circuito elettrico di emergenza, separato dalla logica di controllo della macchina con relè di sicurezza certificato; protezioni elettroniche per il rispetto della direttiva europea 2004/108/CE sulla compatibilità elettromagnetica. Figura 2.1 - Silver Go 6 Capitolo 2 Descrizione dei macchinari Dati tecnici dell'avvolgitore Bobina standard con diametro Dimensioni della bobina di film massimo di 250 mm, diametro estensibile dell'anima di 76mm, larghezza della fascia 500mm, spessore del film 17-23μm Grado di protezione IP 55 Tensione di alimentazione 400V, 50 Hz Tensione comandi 24V Potenza elettrica installata 6kW Sistema di messa a terra TN-S Alimentazione pneumatica 6bar aria secca non lubrificata Verniciatura Fondo catalizzato e vernice poliuretanica ebicomponente Colore parti fisse GRIGIO RAL 7035 Colore parti mobili ROSSO RAL 3020 Colore protezioni perimetrali ROSSO RAL 3020 Condizioni ambientali Temperatura: min +5°C / max +35°C Umidità relativa (senza condensa): max 30-80% 7 Capitolo 2 Descrizione dei macchinari Figura 2.2 - Scheda tecnica Silver Go 2.2 Silver Twin La Silver Twin è una macchina nata per soddisfare requisiti di alte produttività che il mercato richiede con sempre maggior frequenza. L’azione combinata dei due bracci rotanti permette di raggiungere velocità di avvolgimento particolarmente elevate mantenendo nel contempo un assetto bilanciato e stabile. La Silver Twin è dotata di doppio carrello porta bobina con prestiro del film meccanico motorizzato e di un doppio dispositivo di taglio e saldatura del lembo finale del film. Tale dispositivo di saldatura è caratterizzato da una barra di contrasto a scomparsa studiata al fine di evitare qualsiasi contatto con il prodotto pallettizzato e di garantire l’integrità del carico. Anche questa macchina, come la Silver Go, è in grado di avvolgere pallet di dimensioni minori o uguali a 1200×1200,ma ,grazie all'azione dei due bracci rotanti, può avvolgere fino a 140 pallets all'ora. Ha un telaio principale con struttura a portale che appoggia su quattro colonne ed è realizzato con un tubolare in 8 Capitolo 2 Descrizione dei macchinari acciaio saldato. Ha due bracci rotanti sempre realizzati con un tubolare in acciaio e guide esterne per lo scorrimento della slitta di supporto del carrello portabobina. Il movimento rotatorio dei bracci è ottenuto con un sistema pignone-ralla dentata comandata da un motoriduttore con motore autofrenante gestito da inverter. La Silver Twin integra al suo interno anche i seguenti dispositivi: Top Sheet Cover, ossia un macchinario che viene utilizzato per rilasciare sopra il pallet un foglio di polietilene prima che il pallet stesso venga avvolto, si possa realizzare un imballaggio antipolvere; un sollevatore pneumatico del pallet che consente di ottenere l'avvolgimento parziale della pedana anche con carico debordante o rientrante; un gruppo pressore pneumatico per la stabilizzazione del carico pallettizzato; un dispositivo di taglio e bloccaggio del film con l'inserimento del lembo iniziale e del lembo finale tra le spire già avvolte. Numerosi sono i controlli che prevede questa macchina: la regolazione automatica della massima altezza di avvolgimento, protezioni perimetrali e barriere di sicurezza ottenute mediante opportune fotocellule; un quadro elettrico di controllo con logica programmabile computerizzata con comandi manuali e spie di indicazione degli allarmi; una tastiera di interfaccia con l'operatore H.M.I. (human machine interface); un circuito elettrico di emergenza, separato dalla logica di controllo della macchina con relè di sicurezza certificato; protezioni elettroniche per il rispetto della direttiva europea 98/37 sulla compatibilità elettromagnetica. 9 Capitolo 2 Descrizione dei macchinari Dati tecnici dell'avvolgitore: Bobina standard con diametro Dimensioni della bobina di film massimo di 250 mm, diametro estensibile dell'anima di 76mm, larghezza della fascia 500mm, spessore del film 17-23μm Grado di protezione IP 55 Tensione di alimentazione 400V, 50 Hz Tensione comandi 24V Consumo d'aria 100,00 NI/ciclo Potenza elettrica installata 11kW Sistema di messa a terra TN-S Alimentazione pneumatica 6bar aria secca non lubrificata Verniciatura Fondo catalizzato e vernice poliuretanica bicomponente Colore parti fisse GRIGIO RAL 7035 Colore parti mobili ROSSO RAL 3020 Colore protezioni perimetrali ROSSO RAL 3020 Condizioni ambientali Temperatura: min +5°C / max +35°C Umidità relativa (senza condensa): max 30-80% 10 Capitolo 2 Descrizione dei macchinari Figura 2.3 - Silver Twin 2.3 Il carrello porta bobina Sia la Silver Go, sia la Silver Twin montano carrelli porta bobina che permettono di realizzare un prestiro del film meccanico motorizzato fino ad un massimo del 300%. Questo dispositivo permette un notevole risparmio sul consumo di film e dimezza i tempi di cambio della bobina; infatti si può avere un film più robusto all'inizio e alla fine dell'avvolgimento per garantire che il carico sia solidale al pallet, mentre il film sarà più sottile al centro. Attualmente la variazione di prestiro può avvenire in due modi diversi: con un variatore a satelliti oppure con una coppia di ruote dentate. Il 11 Capitolo 2 Descrizione dei macchinari variatore risulta però pesante e richiede di essere cambiato troppo spesso rispetto alle altre parti della macchina, mentre le ruote dentate non permettono di avere un prestiro variabile in movimento, poiché devono essere cambiate a macchina ferma. Questo progetto prevede di modificare il carrello installando un variatore a pulegge coniche che sia pilotabile a distanza e permetta un prestiro superiore al 300%. 12 Capitolo 3 Il carrello Capitolo 3 Il carrello 3.1 Componenti Il telaio del carrello è costituito da due lamiere in acciaio al carbonio Fe360 di spessore , distanziate da tre tubolari , sempre in acciaio al carbonio Fe360. Su queste lamiere sono fissati i supporti che andranno a sostenere gli alberi dei rulli condotti. I rulli condotti sono due: il primo ha un diametro che ruota a velocità maggiore, il secondo ha un diametro ed è quello e ruota con velocità variabile. Questi rulli hanno un'anima in acciaio e sono ricoperti in gomma siliconata con opportune scanalature che consentono al film di aderire perfettamente. Figura 3.1 - Telaio con rulli 13 Capitolo 3 Il carrello Sono presenti altri quattro rulli, più piccoli, che servono per dirigere il film nella direzione voluta. Poiché questi non contribuiscono al prestiro del film, sono realizzati in acciaio e sono montati folli. Nella parte anteriore del carrello viene montata la bobina di film di polipropilene: l'anima della stessa, in genere in cartoncino, è fissata sul centratore, in modo tale da rimanere stabile, ma libera di ruotare. Il film uscente dalla bobina viene mandato al primo rullo folle, che lo indirizza prima al rullo con velocità maggiore, poi a quello con velocità minore, realizzando così il prestiro voluto. Uscendo dal secondo rullo folle, il film attraverserà gli ultimi due rulli che definiscono la tensione del film in uscita. Sulla lamiera superiore è poi montata una molla che può essere posta più o meno in tensione, muovendo la leva a cui è agganciata: sarà questa molla a conferire la tensione ai rulli in uscita. Figura 3.2 - Molla tenditrice 14 Capitolo 3 Il carrello Sempre sulla lamiera superiore viene fissato il motore, che conferisce il movimento al primo rullo, dopo un'opportuna riduzione. Tra il primo e il secondo rullo è montato il variatore, che conferirà la giusta velocità di rotazione al rullo in uscita. È fissato al telaio un tubolare a U che permette di agganciare il carrello al braccio rotante. 3.2 Il film di polipropilene 3.2.1 Caratteristiche meccaniche Sulla bobina caricata sul carrello è avvolto un film in polipropilene: fortemente utilizzato nel settore industriale, è disponibile in bassi spessori con un buon rapporto qualità prezzo; ha elevate proprietà meccaniche, un'elevata trasparenza e una formulazione con antistatici e scivolanti. La sua bassa temperatura di saldabilità consente di utilizzarlo anche ad elevate velocità di confezionamento. Condizioni di allestimento standard: Diametro Diametro Lunghezze standard del film in del esterno mandrino [mm] bobina 25μm 30 μm 38 μm Peso indicativo della 50 bobina(kg/m) μm 152mm 780 15000 14000 12000 8000 390 580 7500 190 7000 5500 4000 Grazie alle sue elevate proprietà meccaniche, il film, all'uscita dal carrello, viene posto in trazione; in questa maniera, dopo che l'unità di carico pallettizzata è stata avvolta, il polietilene lentamente si restringe, aderendo perfettamente al prodotto. 15 Capitolo 3 Il carrello 3.2.2 Il prestiro Quando il film viene posto in trazione, rimane sempre all'interno del campo elastico. Durante il prestiro, invece, il film viene deformato plasticamente, in modo tale da ridurre il suo spessore, ma anche le sue proprietà meccaniche. Il prestiro viene realizzato facendo passare il film attraverso due rulli, il primo alla velocità di svolgimento della bobina, il secondo circa alla velocità di uscita del film dal carrello. Figura 3.3 - Passaggio del film nel carrello Con i film disponibili in commercio, la velocità maggiore non può superare 5 volte la minore. Si deve inoltre tenere conto che il film effettivamente non realizza un prestiro del 400%, perché all'aumentare del prestiro diminuisce il rendimento, che va da un massimo di 1 per un prestiro basso (entro il 50%), fino ad un minimo di 0,8. Nonostante il film diminuisca le sue proprietà meccaniche, oggigiorno il prestiro è sempre richiesto, perché permette di risparmiare sia in termini economici, sia per quanto riguarda lo smaltimento dei rifiuti, visto che la pellicola di polipropilene non è mai riutilizzabile. 16 Capitolo 3 Il carrello Sui macchinari Silver Go e Silver Twin viene montato un carrello che realizza un prestiro variabile perché durante l'avvolgimento dell'unità di carico pallettizzata è richiesto un film più resistente, quindi più robusto, all'inizio e alla fine per garantire la solidità del carico al pallet e un perfetto bloccaggio del film. Nella fase intermedia dell'avvolgimento non sono richieste elevate proprietà meccaniche, quindi si può utilizzare un film molto sottile, sfruttando il massimo prestiro. 17 Capitolo 3 Il carrello 18 Capitolo 4 Il nuovo sistema di prestiro variabile Capitolo 4 Il nuovo sistema di prestiro variabile 4.1 Descrizione 4.1.1 La trasmissione Si dice trasmissione meccanica il complesso degli organi che servono per trasmettere potenza da una entrata ad una uscita. Alcuni di tali organi, come gli alberi, i giunti e gli innesti, trasmettono la potenza senza variare i fattori, cioè con un rapporto di trasmissione costantemente uguale a 1. Fanno talvolta eccezione, fra gli organi sopra elencati, alcuni tipi di giunti (quali i giunti idraulici) e di innesti (quali gli innesti a frizione), il cui comportamento durante i transitori (di avviamento, di arresto o di passaggio da un regime ad un altro) è notevolmente più complesso. Tutti questi organi hanno di regola entrata ed uscita coassiali. Altri organi di trasmissione, invece, come gli ingranaggi, le cinghie e le catene, sono in grado di realizzare rapporti di trasmissione diversi da uno, a volte fissi, a volte variabili a gradini (cambi) o con continuità (variatori continui). La necessità di introdurre un rapporto (di riduzione o di moltiplicazione) può derivare da motivi funzionali. Molto frequentemente, trasmissioni con rapporto minore di uno sono necessarie per collegare un motore veloce ad un utilizzatore lento; infatti, è di solito conveniente (e talvolta necessario) che il motore sviluppi la sua potenza a velocità elevata e coppia relativamente bassa, mentre la velocità angolare dell'utilizzatore è imposta da necessità funzionali. La scelta del tipo di trasmissione più adatto per ogni singola applicazione è dettata da numerose circostanze, quali l'interasse, la potenza, la velocità, il rapporto da realizzare, le caratteristiche del motore e dell'utilizzatore, il 19 Capitolo 4 Il nuovo sistema di prestiro variabile costo, le esigenze di manutenzione, ed altre ancora. A titolo puramente indicativo, la seguente tabella riporta i tipici campi di impiego delle più comuni trasmissioni meccaniche in grado di realizzare rapporti diversi da uno. Rapporto minimo (1) Velocità massima (2) [m/s] Potenza massima (3) [kW] Cinghie piatte semplici 1:8 25 -100 300 Cinghie composte 1:8 25 - 100 4000 Cinghie trapezoidali 1:10 25 - 35 400 Cinghie dentate 1:15 50 - 100 80 Catene articolate semplici 1:6 15 - 25 200 Catene articolate multiple 1:6 15 - 25 700 Ingranaggi cilindrici a denti dritti 1:10 20 - 50 750 Ingranaggi cilindrici esterni a denti elicoidali 1:10 120 50000 Ruote dentate coniche a denti dritti 1:8 20 1200 Ruote dentate coniche a denti curvi 1:8 20 15000 1:100 20 300 Trasmissione Vite - ruota elicoidale (1) Rapporto di trasmissione minimo in un unico stadio; (2) Velocità lineare delle cinghie o delle catene, oppure velocità periferica sulle primitive delle ruote dentate; (3) Potenza massima trasmessa in realizzazioni standard. Gli organi che compongono le trasmissioni meccaniche, come tutti gli organi in movimento, possono risultare pericolosi per gli operatori, e per tanto per il loro impiego sono richiesti opportuni dispositivi di protezione, in molti casi espressamente previsti e imposti dalle leggi riguardanti le norme di sicurezza. 20 Capitolo 4 Il nuovo sistema di prestiro variabile 4.1.2 Scelta del tipo di trasmissione L'idea di base per realizzare un carrello con prestiro variabile che sia al tempo stesso economico e di semplice realizzazione, prevede di montare direttamente sugli alberi dei rulli un variatore meccanico. Si è giunti a questa scelta perché le potenze trasmesse sono ridotte, il campo di variazione della velocità in uscita è modesto e non ci sono le richieste di poter staccare all'utenza, o di invertire il movimento. Il motore eroga una potenza , il variatore richiede un campo di variazione di velocità di e il riduttore che trasmette il moto dal motore al primo rullo gommato deve avere un rapporto di trasmissione di . Non sarà possibile montare un variatore che abbia una sola puleggia costituita da due semipulegge coniche, poiché l'interasse di lavoro deve essere fisso. 4.2 I variatori di velocità I variatori di velocità consentono sia di trasmettere il moto con rapporto di trasmissione costante, sia di variare con continuità tale rapporto, agendo dall'esterno su un apposito comando. Il campo di variazione R di un variatore è definito come il rapporto tra i rapporti di trasmissione massimo e minimo: I variatori che includono nella velocità di uscita anche la velocità zero sono detti a campo finito di variazione di velocità. Spesso i variatori hanno un campo di variazione simmetrico, cioè possono funzionare sia da moltiplicatori, sia da riduttori di velocità, con lo stesso rapporto tra la velocità maggiore (che una volta è quella di uscita, l'altra volta quella di entrata) e la velocità minore. Si può osservare che, se il campo di variazione è R, il rapporto suddetto è . 21 Capitolo 4 Il nuovo sistema di prestiro variabile I variatori comuni di velocità sono classificati in: variatori meccanici, se la variazione è ottenuta cambiando la posizione di un membro intermedio che serve per collegare gli alberi del motore e del condotto; variatori idraulici, se la variazione è ottenuta variando le caratteristiche di pressione e portata di un fluido che trasmette forze e spostamenti tra i membri accoppiati; variatori elettrici, se la variazione è ottenuta modificando le caratteristiche di corrente e tensione di un motore elettrico. Sono qui riassunte le principali caratteristiche di funzionamento dei tre gruppi di variatori. - Potenza trasmissibile: è modesta nel caso dei variatori meccanici, mentre può essere assai elevata nei variatori idraulici ed elettrici. - Rendimento: nei variatori meccanici oscilla tra 0,75 e 0,95; nei variatori idraulici tra 0,5 e 0,65; nei variatori elettrici è molto varia a seconda dei tipi. - Campo di variazione della velocità in uscita: modesto o medio nel caso dei variatori meccanici, medio nel caso dei variatori elettrici, massimo nel caso dei variatori idraulici. - Rapporto momento trasmesso/inerzia del variatore: modesto o medio nel caso dei variatori meccanici, medio nel caso dei variatori elettrici, massimo nel caso dei variatori idraulici. - Possibilità di staccare all'utenza: tale possibilità esiste nel caso dei variatori elettrici e idraulici, non nel caso di variatori meccanici. - Inversioni del movimento: l'inversione è semplice nel caso di variatori idraulici ed elettrici, più complessa nel caso dei variatori meccanici. - Costo: i variatori meccanici sono quelli che costano meno, i variatori idraulici possono essere competitivi rispetto ai variatori elettrici, tranne nel caso in cui le potenze da trasmettere siano basse. 22 Capitolo 4 Il nuovo sistema di prestiro variabile 4.3 I variatori meccanici con cinghia trapezoidale 4.3.1 I variatori meccanici I componenti di questa categoria sono caratterizzati dalla presenza di un membro mobile, che consente di realizzare la variazione del rapporto di trasmissione; esso può essere rigido o flessibile. Nei variatori con membro mobile flessibile il rapporto di trasmissione viene fatto variare modificando la variazione del flessibile. Questi variatori possono essere realizzati con cinghie oppure con catene. I variatori con catene hanno il vantaggio di eliminare gli scorrimenti propri delle variazioni di forza, garantendo il rispetto delle variazione di fase tra ingresso e uscita. I variatori a catena sono quindi impiegati, oltre che per la trasmissione di coppie elevate, quando è indispensabile rispettare le relazioni di fase. Figura 4.1 - Variatore meccanico in campo motociclistico 23 Capitolo 4 Il nuovo sistema di prestiro variabile Nei variatori con membro mobile rigido la variazione del rapporto di trasmissione è ottenuta spostando il punto (o la linea) di contatto del membro intermedio rigido che collega movente e cedente. Il movente può essere piano, conico o sferico. La disposizione degli organi del variatore può essere di tipo ordinario o planetario. La trasmissione è di forza; per aumentare la forza tangenziale trasmessa si possono aumentare i punti di contatto. 4.3.2 I variatori con cinghie I variatori con cinghia trapezoidale sono tra i variatori continui più semplici ed economici. Nel caso più comune, sono costituiti da due pulegge, formate ciascuna da due semipulegge a cono. L'interasse delle due pulegge è fisso, mentre la distanza tra le due semipulegge montate su ciascun albero è variabile: al variare della distanza tra le due semipulegge, varia automaticamente il raggio su cui si avvolge la cinghia. Il variatore è realizzato in modo da comandare contemporaneamente l'avvicinamento delle due semipulegge calettate su un albero e l'allontanamento delle due. In questo modo, il raggio di avvolgimento della cinghia su una puleggia aumenta e quello sull'altra diminuisce: la cinghia, che ha ovviamente lunghezza costante, continua a funzionare regolarmente, mentre il rapporto di trasmissione varia con continuità, essendo uguale all'inverso del rapporto dei raggi di avvolgimento, a meno dei piccoli e inevitabili slittamenti tra cinghia e puleggia. I variatori a cinghia permettono di variare il rapporto di trasmissione anche durante la trasmissione di potenza; la variazione può essere ottenuta agendo manualmente su una manopola che comanda contemporaneamente le due coppie di semipulegge coniche. È anche possibile attuare la variazione del rapporto di trasmissione con un comando pneumatico, idraulico o elettrico, eventualmente collegato in modo automatico ad un dispositivo che misura la variabile (momento, 24 Capitolo 4 Il nuovo sistema di prestiro variabile velocità, o altro) in base al cui valore il rapporto di trasmissione stesso deve variare. Figura 4.2 - Schema di funzionamento del variatore Le cinghie trapezoidali impiegate nei variatori sono spesso dotate di scanalature trasversali, che le rendono simili nell'aspetto a cinghie dentate: lo scopo delle scanalature, però, non è quello di realizzare un comando positivo, come nelle vere cinghie dentate, ma di aumentare la flessibilità delle cinghie, dato che queste devono potersi avvolgere anche su raggi relativamente piccoli rispetto al loro spessore. Esistono anche dei variatori nei quali una sola puleggia è realizzata con due semipulegge a distanza variabile; in questo caso, però, l'interasse delle due pulegge è variabile, dato che la lunghezza della cinghia è ancora costante. Il campo di variazione massimo dei variatori a cinghia è tipicamente , cioè il rapporto tra la velocità angolare in uscita e quella in entrata può essere fatto variare fra 1/3 e 3. Il tempo necessario per passare dal rapporto minimo a quello massimo o viceversa è relativamente lungo; si tenga presente, però, che in molte applicazioni interessano variazioni percentualmente molto più limitate di tale rapporto, o almeno si 25 Capitolo 4 Il nuovo sistema di prestiro variabile richiedano risposte rapide solo per variazioni relativamente modeste, per cui la prontezza di risposta del variatore deve essere valutata in relazione alle reali esigenze di impiego e non sulla base del tempo richiesto per descrivere l'intero campo di variazione. 4.4 La trasmissione con cinghie trapezoidali 4.4.1 Le cinghie trapezoidali Le cinghie trapezoidali rappresentano uno degli organi flessibili più largamente impiegati per la trasmissione di potenza del moto rotatorio. Le tipologie più comuni sono rappresentati nelle figure seguenti, dove sono rappresentate la cinghia classica di sezione costante e la cinghia trapezoidale dentata, che presenta al bordo interno una serie di intagli atti ad aumentare la flessibilità dell'organo. Figura 4.3 - Cinghia trapezoidale Le cinghie del primo tipo sono costituite da elementi in grado di resistere allo sforzo di trazione con piccoli allungamenti, comunemente fili di poliestere avvolti ad anello e immersi in un corpo di elastomero, che, a sua volta, viene fasciato da un rivestimento in tessuto. Le cinghie del secondo tipo, a differenza delle prime, non hanno il rivestimento in tessuto e sono intagliate al bordo interno, così da rendere possibile l'adozione di pulegge di diametro minore. 26 Capitolo 4 Il nuovo sistema di prestiro variabile Le cinghie di entrambi i tipi sono realizzate generalmente ad anello chiuso, con lunghezze accuratamente controllate per rendere possibile l'accoppiamento di più elementi nelle trasmissioni multi cinghia. I requisiti che le cinghie devono generalmente possedere possono essere così riassunti: moderata resistenza agli oli: se olio o grasso vengono a contatto con la cinghia solo occasionalmente, non si devono temere effetti negativi sul rendimento e sulla durata; un contatto prolungato, però, può produrre danni irreparabili; resistenza a temperature estreme: solitamente il funzionamento della cinghia è soddisfacente entro un campo di temperature compreso tra -30 °C e +80 °C; proprietà antistatiche: deve essere garantita l'eliminazione delle cariche elettriche per evitare il pericolo di scintille in ambienti esplosivi; resistenza all'abrasione: queste caratteristiche è particolarmente apprezzata quando la cinghia lavora in ambienti polverosi, come, ad esempio, nei cementifici, in agricoltura o in miniera. La scelta di una cinghia per la trasmissione di potenza viene fatta partendo da alcuni dati iniziali, imposti dalle specifiche di progetto, e utilizzando schemi di calcolo suggeriti dai fabbricanti. 4.4.2 La trasmissione La trasmissione del momento avviene per attrito sull'arco di strisciamento e all'ingresso della cinghia sulla puleggia si ha aderenza, senza strisciamento. Il rapporto di trasmissione, il momento e la potenza sono dati dalle seguenti formule: avendo posto ; 27 Capitolo 4 Il nuovo sistema di prestiro variabile Per quanto riguarda le velocità nei due rami, se si avrà . Il rapporto tra le tensioni nei due rami, per una cinghia poco veloce, per la quale sono trascurabili le forze centrifughe, è dato da: dove: = coefficiente di attrito; = angolo su cui si ha strisciamento tra cinghia e puleggia; = angolo di semiapertura del cono della puleggia. La tensione iniziale vale: La forza sul supporto vale: 4.5 La trasmissione con cinghie dentate 4.5.1 Le cinghie dentate Le cinghie dentate sono organi flessibili che consentono la trasmissione di potenza nel moto rotatorio garantendo un rapporto di trasmissione costante grazie alla presenza di una dentatura che, coniugandosi con apposite puleggi, realizza una trasmissione di forze positiva. Tale aspetto distingue nettamente le trasmissioni con cinghie dentate da quelle con cinghie piatte o trapezoidali, dove la trasmissione di potenza è affidata alle azione tangenziali di attrito tra cinghia e puleggia, con conseguenti strisciamenti e variazioni del rapporto di trasmissione in funzione della coppia trasmessa. La struttura di una cinghia dentata è costituita da un nastro continuo esterno in elastomero di elevata resistenza (policloroprene) che ricopre uno strato di fili in fibra di vetro, avvolti ad elica in doppia serie, ciascuna con fili ritorti in senso opposto. I fili di fibra di vetro presentano una elevata stabilità dimensionale ed una notevole resistenza alla trazione. A 28 Capitolo 4 Il nuovo sistema di prestiro variabile questi elementi aderisce la dentatura, realizzata ancora in policloroprene e rivestita di un tessuto in poliamide, con particolare resistenza all'abrasione e basso coefficiente di attrito. Il profilo della dentatura può essere trapezoidale oppure curvilineo. Nel secondo caso si ottiene uno stato di sollecitazione più omogeneo all'interno del dente. Figura 4.4 - Cinghia sincrona L'elevata flessibilità e la notevole resistenza delle cinghie dentate ne consentono un impiego equivalente, entro ampi limiti, a quello delle ruote dentate e delle catene, con velocità che possono arrivare fino a 50 m/s. Le cinghie dentate non richiedono lubrificazione e funzionano con bassa rumorosità. Le pulegge per cinghie dentate recano sulla fascia esterna i vani per l'accoppiamento con i denti della cinghia. Possono essere realizzate in materia plastica o alluminio, per passi fino a 5 mm, in acciaio o ghisa per passi superiori. 29 Capitolo 4 Il nuovo sistema di prestiro variabile Per evitare lo scarrucolamento della cinghia è necessario che almeno una puleggia, di solito quella minore per motivi economici, sia dotata di flange. Come nel caso delle cinghie trapezoidali, anche per il dimensionamento di una trasmissione con cinghie dentate ci si basa, solitamente, sulle indicazione dei fabbricanti, che suggeriscono procedure di selezioni variabili da produttore a produttore. 4.5.2 La trasmissione La trasmissione del momento avviene per contatto e l'ingresso della cinghia sulla puleggia avviene senza strisciamento, per questo motivo le cinghie dentate sono anche chiamate cinghie sincrone. Il rapporto di trasmissione, il momento e la potenza sono dati dalle seguenti formule: La tensione nel ramo meno teso vale: La forza sul supporto vale: 30 Capitolo 5 Progettazione del nuovo sistema di prestiro Capitolo 5 Progettazione del nuovo sistema di prestiro 5.1 Dati di partenza Si vuole ottenere un prestiro minimo del 50% ed un prestiro massimo del 500% utilizzando delle pulegge variabili, quindi il variatore richiede un campo di variazione di velocità di . Si preferisce mantenere il telaio ed il motore utilizzati fino ad oggi e realizzare le riduzioni di velocità con pulegge, anziché con riduttori, per alleggerire la struttura. Motore Bonfiglioli: Velocità del motore: Potenza nominale: Primo rullo: Velocità angolare: Diametro: Secondo rullo: Diametro: Poiché il motore ha una velocità nominale di 1400 rpm ed il primo rullo richiede una velocità di 560 rpm, tra i due dovrà essere interposto un riduttore di velocità con rapporto di trasmissione . Inoltre, il variatore meccanico con interasse fisso ha un rapporto di riduzione che varia tra e , quindi in uscita dovrà essere interposto un secondo riduttore, cosicché il secondo rullo non ruoti mai a velocità maggiore di quella del primo. 31 Capitolo 5 Progettazione del nuovo sistema di prestiro Figura 5.1 - Schema di funzionamento Tabella identificativa: Sigla Componente della trasmissione A Rullo in ingresso B Rullo in uscita 1 Puleggia motrice 2 Puleggia del rullo in ingresso 3 Puleggia motrice del variatore 4 Puleggia condotta del variatore 5 Puleggia di rinvio 6 Puleggia del rullo in uscita 5.2 Scelta delle pulegge Rapporto di riduzione tra il motore e il rullo in ingresso: 32 Capitolo 5 Progettazione del nuovo sistema di prestiro Dal catalogo Sit scelgo due pulegge dentate con numero di denti e . Per la riduzione variabile, in base alla potenza del motore e al rapporto di riduzione richiesto, scelgo invece dal catalogo Sit una puleggia VOL 130 ed una MONO 130. Figura 5.2 - Puleggia VOL130 33 Capitolo 5 Progettazione del nuovo sistema di prestiro Per il progetto della trasmissione verranno utilizzati i seguenti dati: Figura 5.3 - Puleggia MONO130 Per il progetto della trasmissione verranno utilizzati i seguenti dati: 34 Capitolo 5 Progettazione del nuovo sistema di prestiro Per il prestiro minimo Per il prestiro massimo: La velocità del secondo rullo deve però essere sempre minore della velocità del primo, in particolate, nel caso di prestiro minimo (50%) si dovrà avere: Si dovrà quindi inserire una coppia di pulegge anche in uscita dal variatore con un rapporto di riduzione: Poiché le trasmissioni con pulegge non possono sostenere rapporti di riduzione elevati, provo inizialmente a verificare se si può ottenete il prestiro richiesto con un rapporto . Dal catalogo Chiaravalli scelgo due pulegge dentate Power Grip e e ottengo i valore della velocità angolare minima e massima in uscita: Calcolo le velocità periferiche nei due casi: Per il prestiro minimo si ha la puleggia 3 con diametro massimo (tutta chiusa) e la puleggia 4 con diametro minimo (tutta aperta): 35 Capitolo 5 Progettazione del nuovo sistema di prestiro Figura 5.4 - Schema del prestiro minimo Per il prestiro massimo si ha la puleggia 3 con diametro minimo (tutta aperta) e la puleggia 4 con diametro massimo (tutta chiusa): Figura 5.5 - Schema del prestiro massimo 36 Capitolo 5 Progettazione del nuovo sistema di prestiro Da un'analisi effettuata sulla macchina Pem/3 si è visto che il rendimento reale di prestiro è approssimativamente: Nel nostro caso si riuscirebbe quindi ad avere un prestiro massimo: 5.3 Dimensionamento delle cinghie 5.3.1 1^ trasmissione Rapporto di riduzione: Motore Bonfiglioli classe II: Albero per trasmissioni a funzionamento intermittente, fattore di servizio: Potenza corretta: da tabella scelgo delle pulegge a passo L: 14L075 35L075 Interasse minimo: Lunghezza della cinghia: La prima lunghezza utile è: scelgo una cinghia 270L. Coefficiente per il calcolo dell'interasse effettivo: 37 Capitolo 5 Progettazione del nuovo sistema di prestiro Interasse effettivo: Denti in presa: Fattore di lunghezza: Per si ha una cinghia larga 19,1 con codice 075. La cinghia scelta è 270L075. 5.3.2 2^ trasmissione Si deve dimensionare la cinghia trapezoidale per la trasmissione variabile. Si considera la condizione più gravosa, quella di prestiro massimo. Si considera la condizione più gravosa, quella di prestiro massimo. VOL 130 MONO 130 Interasse minimo: Lunghezza teorica della cinghia: La prima lunghezza utile è: 38 Capitolo 5 Progettazione del nuovo sistema di prestiro Dal catalogo viene consigliata una cinghia trapezoidale per pulegge variabili di sezione : sarà scelta la cinghia il cui sviluppo primitivo è 790mm. Interasse reale: Angolo di avvolgimento: 5.3.3 3^ trasmissione Per dimensionare la cinghia della terza trasmissione si ipotizza sempre di essere nella condizione più gravosa, cioè di avere prestiro massimo. Pulegge: 14L075 42L075 Interasse minimo: Lunghezza della cinghia: La prima lunghezza utile è: scelgo una cinghia 315L. Coefficiente per il calcolo dell'interasse effettivo: 39 Capitolo 5 Progettazione del nuovo sistema di prestiro Interasse effettivo: Denti in presa: Fattore di lunghezza: Per si ha una cinghia larga 19,1 con codice 075. La cinghia scelta è 315L075. 5.4 Calcolo del tiro delle cinghie 5.4.1 1^ trasmissione Potenza del motore: Velocità angolare della prima puleggia: Momento motore: Velocità periferica: Questo valore è accettabile, poiché deve sempre essere minore di circa 30m/s. Tensione minima della cinghia: Considerando un coefficiente di adattamento pari a 1,2 si ottiene il tiro della prima cinghia: 40 Capitolo 5 Progettazione del nuovo sistema di prestiro 5.4.2 Inizio corsa 2^ trasmissione Considerando un coefficiente di adattamento pari a 1,5 si ottiene il tiro della seconda cinghia: 3^ trasmissione Considerando un coefficiente di adattamento pari a 1,2 si ottiene il tiro della terza cinghia: 41 Capitolo 5 Progettazione del nuovo sistema di prestiro 5.4.3 Fine corsa 2^ trasmissione 3^ trasmissione Lo sforzo massimo che deve sopportare la cinghia è con per cinghia dentata. La tensione massima si ha nella terza trasmissione nel secondo caso ( ). Poiché si hanno 6 denti in presa, la resistenza dei denti in presa sarà pari alla resistenza a trazione della cinghia. 42 Capitolo 5 Progettazione del nuovo sistema di prestiro 5.5 Analisi dei problemi Il sistema di riduzione di velocità che è stato dimensionato non può essere montato sul telaio esistente per problemi di ingombri. Per ridurre questi ultimi si sceglie di ridurre gli interassi, montando cinghie più corte. 5.5.1 1^ trasmissione La prima trasmissione definisce dove verrà fissato il motore, che costituisce un ingombro sulla lamiera superiore, a causa del passaggio delle cinghie. Si sceglie approssimativamente il seguente interasse: Lunghezza della cinghia: La prima lunghezza utile è: Avendo sempre 6 denti in presa si sceglie una cinghia 217L075, pulegge montate con interasse di 155,77mm ed un motore Bonfiglioli a flangia ridotta. In questa posizione, però, il motore risulta troppo vicino alla puleggia VOL130, si preferisce quindi prendere la cinghi successiva: 43 Capitolo 5 Progettazione del nuovo sistema di prestiro 5.5.2 3^ trasmissione Nella terza trasmissione l'interasse calcolato è 263mm e poiché un estremo è fissato in corrispondenza dell'asse del secondo rullo, l'altro estremo cade all'esterno della piastra. Si sceglie in prima approssimazione di considerare come interasse minimo la somma dei due diametri. Interasse minimo: Lunghezza della cinghia: La prima lunghezza utile è: scelgo una cinghia 244L. Coefficiente per il calcolo dell'interasse effettivo: Interasse effettivo: Denti in presa: Questo interasse darebbe quasi 6 denti in presa, ma non può essere accettato perché un estremo sarebbe sul bordo della lamiera. La prima cinghi utile è la 217L: 44 Capitolo 5 Progettazione del nuovo sistema di prestiro Non è un valore ottimale, ma viene accettato perché eventualmente si può montare un tendicinghia che garantisce una buona trasmissione. 5.5.3 2^ trasmissione Nella trasmissione variabile si dovrà valutare l'angolo di avvolgimento della cinghia, che deve mantenersi superiore a 140°; come prima si sceglie come primo interasse la somma dei diametri. Questo interasse sarebbe accettabile, poiché l'angolo di avvolgimento è più che sufficiente, ma il nella geometria di insieme la puleggia andrebbe ad interferire con il motore; con un procedimento iterativo si arriva a scegliere la cinghia con lunghezza utile: 45 Capitolo 5 Progettazione del nuovo sistema di prestiro Dopo aver dimensionato le tre trasmissioni sopra descritte, si procede con la realizzazione del nuovo cinematismo progettato e del nuovo telaio di supporto: Figura 5.6 - Cinematismo di variazione e telaio 5.6 Studio della riduzione Per movimentare a distanza il sistema di riduzione di velocità si é pensato di fissare sul volante del variatore una flangia, calettata ad un motore a bassa potenza ( ). Si richiede che il prestiro passi da un minimo del 160% ad un massimo del 300% in 1 secondo. Nei calcoli si assume cautelativamente un rendimento di prestiro pari all'unità nel primo caso e pari a 0,80 nel secondo. 5.6.1 1° caso 46 Capitolo 5 Progettazione del nuovo sistema di prestiro Nel primo rullo si ha: quindi nel secondo rullo si avrà: = Si può quindi calcolare il rapporto di riduzione al variatore: 5.6.2 2° caso = Si può quindi calcolare il rapporto di riduzione al variatore: 47 Capitolo 5 Progettazione del nuovo sistema di prestiro 5.6.3 Scelta dell'attuatore Tra inizio e fine corsa delle pulegge intercorrono 6,17 giri del volantino. Per comodità di calcolo si pone come rapporto di riduzione modificato: Inserendo i dati ottenuti in un grafico si ottengono i giri del volantino i funzione del rapporto di riduzione: 7 giri del volantino [rpm] 6 5 4 3 2 1 0 0 1 2 3 4 5 6 7 8 rapporto di riduzione modificato Dopo aver ricavato i rapporti di riduzione modificati si possono calcolare i corrispondenti giri del volantino: 48 Capitolo 5 Progettazione del nuovo sistema di prestiro Si può ora calcolare la velocità angolare del volantino: Si sceglie quindi un motoriduttore Kelvin K30-37.62 24V 6,7 W con una velocità nominale di 98rpm. Nell'immagine sottostante viene raffigurato l'attuatore che consente il pilotaggio a distanza del cinematismo variabile Figura 5.7 - Motore Kelvin K30 5.7 Componenti Di seguito elenco i componenti che sono stati utilizzati per realizzare il carrello: Motore Bonfiglioli: BE 80B 4 B14 220-400 50Hz 0,75kW Pulegge Dentate Sit: 14L075 (con foro d=19mm); 35L075; 49 Capitolo 5 Progettazione del nuovo sistema di prestiro 14L075 (con foro d=20mm); 42L075; Cinghie dentate Sit: 217L075; 225L075; Pulegge variabili Sit: MONO e VOL 130; Cinghia trapezoidale per puleggia variabile Sit: sezione , Sv. i. 750mm, Sv. pr. 790mm; Motoriduttore Kelvin: K30-37.62 24V 6,7 W 5.8 Masse e ingombri L'obiettivo principale di questo progetto era il dimensionamento di un nuovo carrello che avesse dimensioni compatibili con gli spazi di manovra dei macchinari Silver Go e Silver Twin e che avesse massa inferiore ai 100 kg. Nella seguente analisi si evince che l'obiettivo è stato raggiunto. Componente Massa [kg] Struttura in lamiera con rulli e supporti 64 Motore Bonfiglioli 9,9 Puleggia Dentata Sit 1 0,2 Puleggia Dentata Sit 2 1,65 Puleggia Dentata Sit 3 0,2 Puleggia Dentata Sit 4 1,79 Cinghia dentata Sit 1 0,1 Cinghia dentata Sit 2 0,1 Puleggia variabile MONO130 3 Puleggia variabile VOL130 2 Cinghia trapezoidale 0,17 Motoriduttore Kelvin K30 0,5 50 Capitolo 5 Progettazione del nuovo sistema di prestiro Massa totale 83,44 Figura 5.8 - Carrello completo 51 Capitolo 5 Progettazione del nuovo sistema di prestiro 52 Capitolo 6 Analisi agli elementi finiti Capitolo 6 Analisi agli elementi finiti 6.1 Analisi dei carichi È sta effettuata un'analisi agli elementi finiti per simulare la sollecitazione del nuovo telaio a seguito delle forze a cui è sottoposto durante il funzionamento ciclico sui macchinari Silver Go e Silver Twin. Il carrello è montato a sbalzo su un braccio che parte da fermo e accelera fino alla velocità di regime; dopo aver completato il ciclo di lavoro, decelera fino a fermarsi. Durante il funzionamento il telaio sarà quindi sottoposto sia alle forze dovute all'accelerazione radiale e all'accelerazione tangenziale, sia ai tiri delle cinghie che scaricano sui supporti montati sul telaio stesso. Figura 6.1 - Applicazione delle forze 53 Capitolo 6 Analisi agli elementi finiti 6.2 Le forze in gioco 6.2.1 Dati Lunghezza del braccio: Numero di giri: Intervallo di tempo: Massa del carrello: Massa della bobina: 6.2.2 Calcoli delle forze Velocità angolare: Accelerazione angolare: Accelerazione radiale: Accelerazione tangenziale: Massa totale: Forza radiale: Forza tangenziale: Il carrello è così sottoposto alle seguenti forze: 54 Capitolo 6 Analisi agli elementi finiti 6.3 Risultati Il carrello, realizzato in acciaio al carbonio Fe360, è sottoposto ad una tensione massima : . Considerando che il materiale di cui è costituito ha una tensione di snervamento tensione di rottura ed una , si può affermare che la sollecitazione è accettabile, per il buon funzionamento del carrello. Figura 6.2 - Analisi dell'intero carrello Nonostante siano state aggiunte le masse delle pulegge, non presenti nel progetto originale, le piastre a cui sono fissati i supporti che scaricano le tensioni degli alberi, non risultano eccessivamente sollecitate. 55 Capitolo 6 Analisi agli elementi finiti Figura 6.3 - Analisi delle piastre superiori La zona più sollecitata risulta essere il bordo della piastra inferiore, su cui sono montati i rulli tenditori. Questa parte, però, viene realizzata già da tempo sui carrelli attualmente in uso, senza aver mai creato problemi. Viene comunque consigliato di rinforzare il supporto inferiore, che scarica direttamente sul bordo della lamiera. Figura 6.4 - Analisi della piastra inferiore Infine, nei calcoli effettuati si è tenuto conto che, poiché il telaio del carrello è sottoposto ad una sollecitazione ciclica, la direzione della forza 56 Capitolo 6 Analisi agli elementi finiti tangenziale varia a seconda che il braccio sia in fase di accelerazione o di decelerazione. In entrambi i casi la sollecitazione rimane inferiore ai 90 MPa. Figura 6.5 - Analisi del variatore 57 Capitolo 6 Analisi agli elementi finiti 58 Capitolo 7 Conclusioni Capitolo 7 Conclusioni Lo studio effettuato si è concentrato, come visto, sul dimensionamento di un nuovo sistema di prestiro variabile del film che prevedesse l'uso di pulegge a diametro variabile, la cui regolazione potesse avvenire a distanza, tramite un attuatore elettrico. Verranno qui esposti i risultati ottenuti nelle diverse fasi di studio. 7.1 Il variatore Tenendo ben presente i dati di partenza, velocità di rotazione del motore, velocità di rotazione del primo rullo e prestiro richiesto, si è scelto di utilizzare una coppia di pulegge variabili MONO130 e VOL130 della Sit s.p.a. e due coppie di pulegge dentate Power Grip della Chiaravalli, che realizzassero le riduzioni di velocità volute. Figura 7.1 - Il variatore 59 Capitolo 7 Conclusioni Per effettuare la regolazione del variatore si è scelto di fissare una piccola flangia sul volantino della puleggia, e di calettare su quest'ultima un motorino Kelvin con una potenza di 6,7 W. 7.2 Il telaio Si è scelto di mantenere la struttura originale per quanto riguarda il sistema di rulli, mentre per sostenere il sistema di riduzione è stata aggiunta una seconda piastra, con dimensioni leggermente maggiori della prima, per consentire l'alloggiamento del motore; infine il motore passopasso per la movimentazione della puleggia variabile è stato fissato su un apposito telaio. Figura 7.2 - Il telaio Per ogni albero è stato montato un supporto sul telaio, cercando sempre di minimizzare gli ingombri. Sono stati rispettati i vincoli dimensionali imposti dai movimenti dei bracci della Silver Go e della Silver Twin. 60 Capitolo 7 Conclusioni 7.3 Analisi agli elementi finiti Per effettuare questa analisi si sono considerate le seguenti tipologie di forze: accelerazione radiale e accelerazione tangenziale che generate dal movimento del braccio che sostiene il carrello, per la massa complessiva; accelerazione gravitazionale; tiro delle cinghie, considerato nel caso peggiore. L'analisi agli elementi finiti ha dato esito positivo; nonostante siano state aggiunte le masse delle pulegge, non presenti nel progetto originale, e siano stati introdotti i tiri delle cinghie, agenti sugli alberi, si ha un tensione massima inferiore a 90 MPa. Tale valore viene ritenuto accettabile per il funzionamento del carrello, poiché è nettamente inferiore rispetto al valore dello snervamento. Figura 7.3 - Analisi agli elementi finiti 61 Capitolo 7 Conclusioni 7.4 Sviluppi futuri La soluzione adottata soddisfa i requisiti fondamentali di semplicità costruttiva, di minimizzazione dei pesi, di facilità di manutenzione, di affidabilità e di riduzione degli ingombri. Per il particolare lavoro ciclico che deve svolgere il carrello, eventuali sviluppi futuri prevedono la verifica a fatica del telaio. 62 Bibliografia Bibliografia [1] E. Funaioli - A. Maggiore - U. Meneghetti "Lezioni di meccanica applicata alle macchine Vol. I" Pàtron Editore [2] E. Funaioli - A. Maggiore - U. Meneghetti "Meccanica degli azionamenti" Pàtron Editore [3] A. Pareschi - A. Persona - E. Ferrari - A. Regattieri "Logistica integrata e flessibile" Progetto Leonardo [4] www.pieri.it [5] www.sitspa.it [6] www.chiaravalli.it [7] www.bonfiglioli.it 63
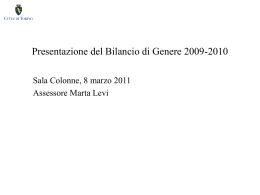
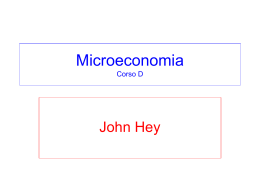
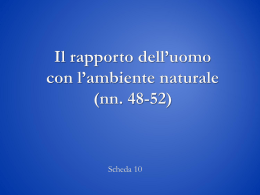
Scarica