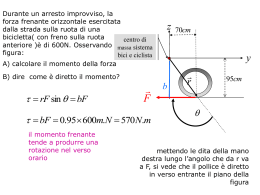
Corso di Sistemi di Trazione Lezione 15: Aderenza e manovra di frenatura dei veicoli A. Alessandrini – F. Cignini – C. Holguin – D. Stam AA 2014-2015 Argomenti • • • • • • • • Forze scambiate dalla ruota Grafico delle pressioni Andamento delle forze per ruota motrice e frenata Scorrimento Modello fisico di veicolo Come si attua la frenatura ABS ESP Obiettivi della lezione • Comprendere gli scambi di forza tra gli pneumatici e il suolo e come questo scambio vari a seconda delle condizioni di marcia • Cosa si intende per scorrimento e come si valuta • Come avviene la manovra di frenatura, quali sono i limiti e le prestazioni dell’azione manuale e quali sono quelli dei dispositivi elettronici come ABS ed ESP Un ricordo sulla distribuzione delle pressioni di contatto Confronto di pressioni e risultanti RuotaRuota in Movimento ferma Le pressioni sull’intera impronta Sollecitazione della ruota a taglio Diagramma del taglio tx ruota Deformazione della Modificazione del taglio con ruota traente Modificazione del taglio con ruota frenata Sforzi di contatto e limiti di aderenza Il concetto di scorrimento L L0 L0 s 1 per ruota motrice L L L0 L L 1 s L0 L 0 per ruota frenata con: • s = scorrimento (adim) • L = spazio percorso in condizioni di puro rotolamento • L0= spazio effettivamente percorso Lo scorrimento espresso in termini di velocità ωRr v v per ruota motrice s 1 ωRr ωRr s v ωRr 1 ωRr per ruota frenata v v con: • w = velocità angolare ruota (rad/s) • Rr= raggio di rotolamento ruota (m) • v = velocità veicolo o mozzo ruota (m/s) Andamento dell’aderenza con lo scorrimento La manovra di frenatura • Il trasferimento di carico • La ripartizione di frenata – fissa e – variabile • La frenatura con ABS Il modello fisico di veicolo per descrivere la manovra di frenatura l n m h RP FP K Ma H Mg RA FA O Il modello fisico di veicolo per descrivere la manovra di frenatura l n,m,h Ra, Rp Fa, Fp M a v Ia, Ip a, p Ss, Sp r ma, mp mFa, mFp = = = = = = = = = = = = = = interasse [m] quote del baricentro [m] reazioni normali [N] forze tangenziali terreno-ruote [N] massa del veicolo [kg] accelerazione del veicolo [m/s2] velocità del veicolo [m/s] momenti d’inerzia polari ridotti agli assi anteriore e posteriore [kg m2] velocità angolare degli assi anteriore e posteriore [rad/s] scorrimento anteriore e posteriore coefficiente di aderenza raggio della ruota [m] momenti frenanti anteriore e posteriore [Nm] momenti delle forze tangenziali sulle ruote [Nm] Ripartizione di frenata 1.0 100/0 Limite di ribaltamento 0.89 g Coefficiente di aderenza ruota anteriore 0.8 g 0.7 g 0.8 90/10 0.6 g 0.5 g 0.6 80/20 Ripartizione di f renata 0.4 g Decelerazione 70/30 Massima ef f icienza f renante 0.3 g 60/40 0.4 0.24 g 50/50 0.2 g 40/60 0.2 30/70 0.1 g 20/80 10/90 0/100 0.0 0.0 0.2 0.4 0.6 0.8 Coe fficie nte di ade re nza ruota pos te riore 1.0 Le equazioni del modello (1/2) dv ( Fa Fp ) dt dv R a l Mgn M h dt dv R p l Mgm M h dt da Ia mFa ma dt dp Ip mFp mp dt Fa (Sa )R a relazione tra M Fp (S p )R p equilibrio alla traslazione del veicolo (1) equilibrio alla rotazione rispetto al polo k (2) equilibrio alla rotazione rispetto al polo o (3) equilibrio alla rotazione ruota anteriore (4) equilibrio alla rotazione ruota posteriore (5) forza tangenziale e carico ruota anteriore (6) relazione tra forza tangenziale e carico ruota posteriore (7) Le equazioni del modello (2/2) Sa 1 Sp 1 ar v pr scorrimento della ruota anteriore (8) scorrimento della ruota posteriore (9) v mFa rFa mFp rFp definizione di momento delle forze tangenziali anteriore (10) definizione di momento delle forze tangenziali posteriore (11) Soluzione alle differenze finite dv v f v i dt Δt dωa ω ωai af dt Δt dω p dt ω pf ω pi Δt vf = velocità finale dell’intervallo di tempo t vi = velocità iniziale dell’intervallo di tempo t t = intervallo di tempo d’integrazione af = velocità angolare della ruota anteriore finale dell’intervallo di tempo t ai = velocità angolare della ruota anteriore iniziale dell’intervallo di tempo t pf = velocità angolare della ruota posteriore finale dell’intervallo di tempo t pi = velocità angolare della ruota posteriore iniziale Soluzione • Si conoscono ma, mp, ai, pi, t, vi, la curva di aderenza in funzione dello scorrimento e tutti i parametri geometrici del veicolo. • Si inseriscono le equazioni 8 e 9 nelle 6 e 7 e queste nella 1 • Risolvendo il sistema formato dalla 1 modificata e dalle 2 e 3 si ottiene vf • Inserendo 2 e 6 nella 10 e 3 e 7 nella 11 si ottengono mFa, mFp • Dalle equazioni 4 e 5 si ricavano af, pf. • Usando i valori finali ricavati come valori iniziali dell’intervallo di tempo successivo si ripete il calcolo fino all’arresto del veicolo o al bloccaggio delle ruote. Funzionamento dell’ABS La decelerazione nella frenatura con ABS Definizioni di frenata esitante e frenata insufficiente • Frenata insufficiente - La frenata è definita insufficiente quando lo sforzo sul pedale del freno è insufficiente durante l’intera frenata. • Frenata esitante - La frenata è definita esitante quando il guidatore nella fase iniziale esercita uno sforzo insufficiente che poi tende ad incrementare troppo lentamente. Rappresentazione grafica delle frenate insufficienti ed esitanti Grafico Decelerazione / Tempo. a) Frenata Insufficiente; b) Frenata Esitante; c) Frenata BAS. Fonte: Mercedes. Il sistema Mercedes BAS Il Brake Assist (BAS) è un sistema di sicurezza attivo integrato con la servo-assistenza dell’impianto frenante. Interviene allorquando il guidatore in una situazione di emergenza frenasse molto rapidamente. In base alla velocità con cui viene azionato il pedale del freno, il sistema riconosce se vi sia una situazione di frenata emergenza. In tal caso viene aperta una valvola elettromagnetica situata nel servofreno e quest’ultimo entra pienamente in azione. Se il guidatore toglie il piede dal pedale la valvola viene chiusa dal sistema. Il controllo elettronico della stabilità Vari acronimi ESP, ESC, DSC, VDC Obbligatorio su auto immatricolate dopo 1°Novembre 2014 Ha lo scopo di frenare e/o ridurre la coppia motrice alle singole ruote, in caso di sotto/sovrasterzo o di sbandata, basandosi su: • 4 sensori di velocità (1 ogni ruota) integrati nel mozzo ruota (stessi dell’ABS). • 1 sensore di angolo sterzo, che comunica alla centralina la posizione del volante e quindi le intenzioni del guidatore. • 3 accelerometri (1 per asse spaziale) normalmente posizionati a centro vettura.
Scaricare