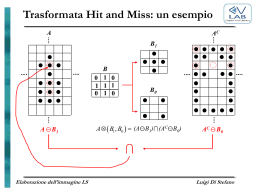
A.a. 2010/2011 Elaborazione dell’immagine M Individuazione di Forme – Integrazione Luigi Di Stefano Template Matching veloce nel dominio di Fourier (1) • Utilizzando la NCC: NCC (i, j ) 1 T (i, j) I (i, j) , K i, j K i , j I i, j T T (i, j ) I (i, j ) I (i, j ) T ( i, j ) I (i, j ) T (i, j ) I (i, j) T (i, j) I (i, j ) T (i, j ) I (u, v) T (u, v) IFFT NCC (i, j ) FFT 1 1 I (u, v) T u, v K i, j FFT Elaborazione dell’immagine M Luigi Di Stefano Template Matching veloce nel dominio di Fourier (2) • Utilizzando la SSD M 1 N 1 SSD(i, j ) I (i m, j n) T m, n 2 m 0 n 0 M 1 N 1 M 1 N 1 I (i m, j n) T m, n 2 m 0 n 0 m 0 n 0 I i, j 2 IFFT T 2 M 1 N 1 2 I (i m, j n) T m, n m 0 n 0 2 T (i, j ) I (i, j ) 2 FFT 1 I (u , v) T u , v FFT Elaborazione dell’immagine M Luigi Di Stefano Template Matching veloce mediante bounds efficienti x1 X X xN xi i 1 N p p 1 p p 1, X I i, j , Y T i, j SADmin T skip (i,j) ! Disuguaglianza Triangolare: X p Y M 1 N 1 M 1 N 1 m 0 n 0 m 0 n 0 XY I i m, j n T m, n SAD i, j F SAD i, j SAD i, j SADmin Elaborazione dell’immagine M p i, j lower-bound calcolabile efficientemente ! Algoritmi veloci basati su bounds anche per SSD, NCC e ZNCC. Luigi Di Stefano p GHT: Generalized Hough Transform (1) • Estensione della HT a forme non descrivibili analiticamente. x B Fase Off-line (costruzione del modello) r y 1. Scelta di un punto di riferimento y. 2. Scelta di un passo di quantizzazione della direzione del gradiente ∆φ 3. Per ciascun punto x del contorno B: 1. Calcolo della direzione del gradiente φ(x) 2. Determinazione del vettore r che va dal punto x al riferimento y. 4. Memorizzazione di r come funzione di ∆φ (R-Table) Ogni entry della tabella può contenere più di un vettore R Elaborazione dell’immagine M Luigi Di Stefano GHT: Generalized Hough Transform (2) Fase On-line (riconoscimento) 1. B Inizializzazione di una immagine A[y] come accumulatore Per ciascun edge pixel x dell’immagine analizzata: 2. Calcolo della direzione del gradiente φ 3. Quantizzazione di φ ed accesso alla R-Table. Per ogni vettore ri memorizzato nella riga acceduta: y x 4. a) Calcolo della posizione del punto di riferimento associato a Ri: y=x + ri b) Incremento della corrispondente cella dell’accumulatore: A[y]++ Ricerca dei picchi dell’accumulatore, al fine di individuare possibili istanze della forma cercata. r1,r2,r3 Elaborazione dell’immagine M Luigi Di Stefano GHT: Generalized Hough Transform (3) • Riconoscimento invariante per rotazione x = + B x r r r B y y T R R mod 2 • Invarianza per scala r : y x rs x s r , A y, s Elaborazione dell’immagine M r : y x r x ROT r, , A y, • Invarianza per rotazione e scala r : y x s r , A y, , s Luigi Di Stefano
Scaricare