☰
Esplorare
registrati
Iscriviti
Caricare
×
Scaricare
senza categoria
meccatronica
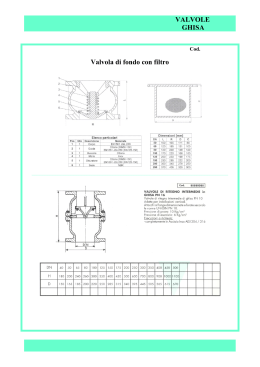
VALVOLE GHISA Valvola di fondo con filtro
Mit Mausklick gelangen Sie zum [Blaetterkatalog]
SMC ITALIA - Assofluid
PDF - Ticomm & Promaco S.r.l.
VALVOLA A FARFALLA A COMANDO PNEUMATICO
OGGETTO: VERIFICA VALVOLE DI SICUREZZA OGNI 2 ANNI • A
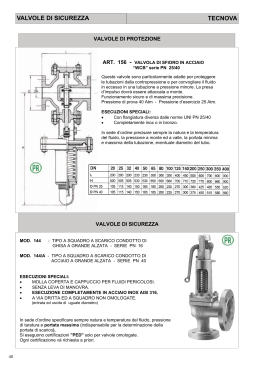
Valvole di sfioro
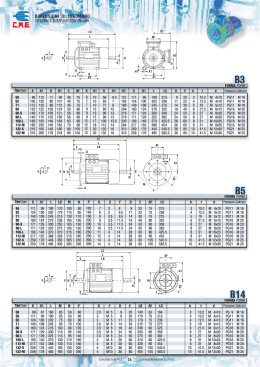
DIMENSIONI DI INGOMBRO OVERALL DIMENSIONS IN mm.
DICHIARAZIONE DI CONFORMITA`
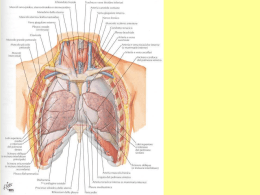
Il Cuore
![Mit Mausklick gelangen Sie zum [Blaetterkatalog]](http://s2.diazilla.com/store/data/000588109_1-9d573e2cd98d89a9a1156784859a005c-260x520.png)