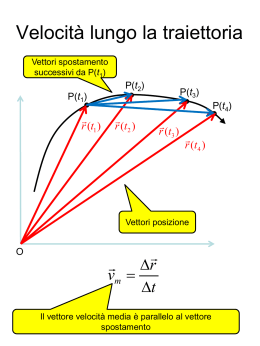
1. x(t) = vox t legge oraria della componente orizzonatale del moto Nome Grandezza, Simbolo, Unità equivalenti radiante al secondo Velocità angolare, rad/s 2. y(t) = voy t − (1/2)gt2 legge oraria della componente verticale del moto newton Forza, N, Kg·m/s2 pascal Pressione, Pa, N/m2 v oy 3. y(x) = vox x− p 4. v = vx2 + vy2 joule Energia, lavoro, calore, J, N·m watt Potenza, flusso radiante, W, J/s α 0◦ 30◦ 45◦ 60◦ 90◦ α 0 π/6 π/4 π/3 π/2 sin α 0 √1/2 √2/2 3/2 1 cos α √1 √3/2 2/2 1/2 0 tan α √0 3/3 √1 3 ∞ 2 1 g 2 x 2 vox traiettoria 2 5. hmax = voy /2g 6. G = (vo2 sin 2Θ)/g = (2vox voy )/g gittata Moto circolare : 1. f = 1/T - f frequenza, T Periodo - velocità angolare 2. ω = ∆θ ∆t − → 3. ω - vettore velocità angolare con direzione perpendicolare al piano di rotazione e verso tale da vedere la rotazione in senso antiorario 4. α = ∆ω - accelerazione angolare ∆t − → 5. α - vettore accelerazione angolare con direzione perpendicolare al piano di rotazione p 1. y = A sin Θ, x = A cos Θ, A = x2 + y 2 2. sin Θ = y/A, cos Θ = x/A, tan Θ = y/x − → → → → A = Ax − ı + Ay − + Az − − → − → − → − → B = Bx ı + By + Bz − → − → − → − → Prodotto scalare A · B = | A || B | cos α = Ax Bx + Ay By + Az Bz − → − → − → − → Prodotto vettoriale A × B = | A || B | sin α = − → → ı (Ay Bz − Az By ) + − (Az Bx − Ax Bz ) + − → k (Ax By − Ay Bx ) 6. v = (2πR)/T = 2πRf = ωR - moto circolare uniforme - modulo del vettore velocità lineare 7. ω = Θ/T = 2π/T = 2πf = v/R - moto circolare uniforme - modulo del vettore velocità angolare 1. ~v = ∆~ x/∆t - vel. media 8. acp = (2πv)/T = v 2 /R = ω 2 R = (4π 2 R)/T 2 - moto circolare uniforme - modulo del vettore accelerazione centripeta 2. ~a = ∆~v /∆t - acc. media 9. T = (2π)/ω Cinematica - definizioni : Somma di forze interne : PN −−→ 1. 1 Finti = 0 Moto rettilineo uniforme : 1. v = vo 2. x = xo + vo t Quantità di moto - Urti : → → 1. − p = m− v quantità di moto p − → 2. | p | = p2x + p2y + p2z − → − → 3. I = F ∆t - Impulso − → → 4. ∆− p = F est ∆t 3. a = o Moto rettilineo uniformemente accelerato : 1. v = vo + at 2. x = xo + v0 t + (1/2)at2 3. v = (vo + v)/2 Forze : 4. a = (v − vo )/∆t − → 1 m2 1. F g = G mR 2 gravitazionale Formule utili - cinematica : 1. x − xo = ((v + vo )/2)∆t spostamento in funzione del tempo 2. → − R R Forza di attrazione → − R R Versore della direzione congiungente le due masse puntiformi − → 1 m2 3. | F g | = G mR intensità della forza di 2 attrazione gravitazionale − → → 4. P = m− g Forza peso − → → 5. F el = −k− x forza elastica; k co→ stante elastica (N/m); − x allungamento 2. x − xo = vt − (1/2)at2 spostamento eliminando vo 3. v 2 = vo2 + 2a(x − xo ) 4. x − xo = (v 2 − vo2 )/(2a) spostamento in funzione di vo , v, a Moto del proiettile : le formule di seguito sono ricavate con l’ipotesi che il cannone sia posto nell’origine del sistema di riferimento (xo = 0 e yo = 0) e che il proiettile cada sul piano orizzontale y = 0. dell’estremo libero della molla; − → → 6. | F | = k|− x | intensità della forza elastica − → − → − → 7. | F a | = µ| F N | Forza di attrito; F N Forza premente su una superficie di appoggio 1 − → 8. T Tensione della fune 7. I = 21 M R2 cilindro/disco di massa M e raggio R (rispetto ad un asse passante per il centro dell’area di base e parallelo all’asse del cilindro/disco) Vincoli : 1. Appoggio - Reazione vincolare perpendicolare al piano di appoggio 1 8. I = 12 M L2 sbarra di massa M e lunghezza L (rispetto ad un asse passante per il centro e perpendicolare alla sbarra) 2. Cerniera - Esercita una reazione vincolare, ma non un momento di una forza (permette la rotazione) 9. I = 25 M R2 sfera piena di massa M e raggio R (rispetto ad un asse passante per il centro) 3. Incastro - Esercita una reazione vincolare e un momento di una forza (non permette la rotazione) 10. I = 32 M R2 sfera vuota di massa M e raggio R (rispetto ad un asse passante per il centro) 4. Carrucola - Modifica la direzione di applicazione di una forza senza modificarne l’intensità Momento angolare : − → 1. R vettore braccio → 2. − p vettore quantità di moto − → − → → → 3. L = R × − p = I− ω vettore momento angolare → − P −−→ 4. ∆∆tL = Mest conservazione del momento angolare −−→ 5. Mest momento delle forze esterne al sistema Lavoro, Energia, Potenza : − → → 1. L = F · ∆− s Lavoro 2. Ec = 12 mv 2 Energia cinetica 3. L = ∆Ec Teorema dell’energia cinetica 4. Ug = −G m1Rm2 Energia potenziale gravitazionale - generale 5. Ug = mgh Energia potenziale gravitazionale - sulla superficie terrestre Equilibrio : PN − → 1. = 0 equilibrio traslazionale 1 Fi (notazione vettoriale) PN − → 2. = 0 equilibrio rotazionale 1 Mi (notazione vettoriale) 6. Eel = 21 kx2 Energia potenziale elastica; k → costante elastica (N/m); − x allungamento dell’estremo libero della molla 7. Emecc = Ec + Ug + Uel Energia meccanica totale 8. ∆Emecc = Laf dove Laf è il lavoro delle altre forze e non comprende il lavoro della forza di attrazione gravitazionale, della forza peso e della forza elastica 3. ( Equilibrio di un punto materiale (2D) PN Fxi = 0 P1N 1 Fyi = 0 4. 8 Equilibrio di un corpo rigido (2D) P > N Fxi = 0 < P1N 1 Fyi = 0 > :PN 1 Mzi = 0 9. ∆Emecc = 0 Conservazione dell’energia meccanica, in assenza di altre forze 10. ∆Emecc = Lnc Conservazione dell’energia meccanica, in presenza di forze non conservative − → → 11. P = L = F · − v Potenza Pressione : ∆t 1. P = FS⊥ - S superficie; F⊥ componente della forza che agisce perpendicolarmente alla superficie Centro di massa : P − → − → PN m 1. R cm = N i 1 mi r i / 1 PN PN − → − → 2. v = m v / m cm 1 i i 1 Pressione idrostatica - Legge di Stevino : i 1. P (h) = Po + ρgh → − → PN m 3. − a cm = = i 1 mi a i / PN − PN −−→ 1PN → PN F / m = F / m i i esti i 1 1 1 1 PN Forza di Archimede : 1. Far = ρF Vimm g Momento di una forza : − → 1. R vettore braccio della forza − → 2. F vettore forza − → − → − → → 3. M = R × F = I − α vettore momento di una forza → 4. − α vettore accelerazione angolare Equazione di continuità : 1. A1 v1 = A2 v2 2. Q = Av portata di volume 3. Qm = ρAv portata di massa Legge di Bernoulli : 5. I momento d’inerzia 1. P1 + 12 ρv12 + ρgh1 = P2 + 12 ρv22 + ρgh2 6. I = M R2 anello di massa M e raggio R (rispetto ad un asse passante per il centro e perpendicolare al piano dell’anello) 2
Scaricare