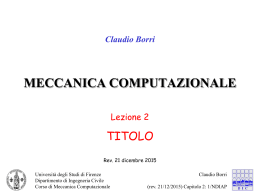
Trave inflessa indeformabile a taglio (Bernoulli) v1 v2 θ1 l NODO 1 x = x1 θ2 x NODO 2 x = x2 Trave caricata nei nodi, assenza di sforzo normale Scelta della funzione interpolante gli spostamenti: vx f (v1 , v2 ,1 ,2 , x) v(x x1 ) v1 dv dx 1 x x1 Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale t.c. v(x x2 ) v2 dv dx 2 x x2 Claudio Borri (rev. 21/12/2015) Capitolo 2: 1/NDIAP Trave inflessa indeformabile a taglio (Bernoulli) Sia il sistema di coordinate fissato tale che: x1 = 0 e x2 = l. Si assume che la funzione interpolante sia del tipo: v( x) a 0 a1 x a 2 x 2 a 3 x 3 Imponendo le 4 condizioni al contorno troviamo le 4 costanti: v( 0 ) v1 a0 a 0 v1 v(l) a0 a1l a2l 2 a3l 3 v2 a1 1 dv v1 1 dx 0 a2 dv a1 2a2l 3a3l 2 2 dx l Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale 3 1 21 2 v v 2 1 l2 l 2 1 a3 2 v1 v2 2 1 2 l l Claudio Borri (rev. 21/12/2015) Capitolo 2: 2/NDIAP Trave inflessa indeformabile a taglio (Bernoulli) Quindi: v( x) 1 ( x)v1 2 ( x)1 3 ( x)v2 4 ( x)2 dove: 3x 2 2 x 3 1 ( x) 1 2 3 l l 2x 2 x 3 2 ( x) x 2 l l 3x 2 2 x 3 3 ( x) 2 3 l l x3 x2 4 ( x) 2 l l Funzioni di forma Hermitiane: Sono di ordine almeno C1, ciò significa che rendono sia v che dv/dx continui tra due elementi adiacenti. Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 3/NDIAP Trave inflessa indeformabile a taglio (Bernoulli) Calcoliamo la matrice di rigidezza dell’elemento k(e) utilizzando discretizzazione del PLV (equilibrio in forma debole): l k ( e ) BT EB dx 0 B cinΩ dove: Ω [1 2 3 4 ] cin d2 2 dx d 21 d 22 d 23 d 24 B cinΩ 2 dx 2 dx 2 dx 2 dx Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Operatore cinematico Matrice delle funzioni di forma per le deformazioni Claudio Borri (rev. 21/12/2015) Capitolo 2: 4/NDIAP la Trave inflessa indeformabile a taglio (Bernoulli) Calcoliamo la matrice delle funzioni di forma per le deformazioni: d 21 d 22 d 23 d 24 B cinΩ 2 2 2 2 dx dx dx dx d 2 1 dx 2 d 2 2 dx 2 d 23 dx 2 d 2 4 dx 2 6 12 x 3 2 l l 4 6x 2 l l 6 12 x 2 3 l l 2 6x 2 l l Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale 6 12 x B 2 3 l l 4 6x 2 l l 6 12 x 3 2 l l Claudio Borri (rev. 21/12/2015) Capitolo 2: 5/NDIAP 2 6x 2 l l Trave inflessa indeformabile a taglio (Bernoulli) Quindi, la matrice di rigidezza dell’elemento k(e) è: 4 6 x 6 12 x 2 6x 6 12 x B 2 3 2 2 3 2 l l l l l l l l l k ( e ) BT EB dx dove: E EJ 0 l l l 0 0 0 k ( e ) BT EB dx BT EJ Bdx EJ BT Bdx Ad esempio: k11( e ) 2 EJ 6 12 x EJ 2 3 dx ... 12 3 l l l 0 l Università degli Studi di Firenze Dipartimento di Ingegneria Civile Corso di Meccanica Computazionale Claudio Borri (rev. 21/12/2015) Capitolo 2: 6/NDIAP
Scaricare