Cinematica e Dinamica della Trottola (...e non solo) Alessio Squarcini 15/05/08 Sommario In questa breve dispensa vengono esposti i principi basilari della cinematica del corpo rigido, soffermandoci sulla parametrizzazione dei moti rigidi tramite gli angoli di Eulero. Successivamente viene affrontato lo studio della dinamica della trottola di Lagrange. Per la quale ne viene fornita, in primis una analisi qualitativa del moto di precessione e di nutazione. In seguito in approssimazione di trottola veloce viene derivata l’ampiezza della nutazione, la frequenza di nutazione e di precessione. Nella restante parte della dispensa viene esposta una breve panoramica degli argomenti inerenti la dinamica rigida. Lo scopo di questo excursus è quello di rendere una visione di insieme di quella che è la dinamica del corpo rigido; quali le equazioni di Eulero, la loro risoluzione per una trottola asimmetrica in moto per inerzia ed infine i moti di Poinsot. Molti problemi in meccanica sono integrabili per quadrature ed inversioni, e spesso gli integrali che si devono invertire non sono trigonometrici, ma ellittici. Per questo in appendice è riportata una breve esposizione delle funzioni ellittiche e delle loro principali proprietà. Lo scopo dell’appendice è quello di fornire un semplice strumento di calcolo, per uno studio sistematico di queste ultime si rimanda ai testi di analisi o ai manuali sulle funzioni speciali. Lo studio di questi sistemi fisici è assai standard, qualsiasi libro di meccanica tratta in modo più o meno diffuso questi temi. Tuttavia, per esperienza personale ho preferito incentrare la quasi totalità di queste note sul lavoro monumentale di Goldstein ([1]), dalla quale sono tratte quasi letteralmente. Per chi preferisce un approccio formale e geometrico ai moti rigidi può consultare il classico libro di Arnold ([4]). Ovviamente la dinamica rigida è affrontata con grande stile ed eleganza anche da Landau ([2]). Ulteriori approfondimenti di carattere fisico-matematico sia sulla cinematica rigida che sulla dinamica possono trovarsi in Fasano-Marmi ([3]). [email protected] 1 Indice 1 Cinematica rigida 1.1 Rotazioni infinitesime . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Gli angoli di Eulero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 La trottola di Lagrange 2.1 La trottola veloce . . . 2.2 Una tecnica alternativa 2.3 La precessione regolare 2.4 Trottola verticale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 4 5 . 9 . 11 . 12 . 13 3 Le equazioni di Eulero 14 4 La trottola asimmetrica 15 5 Il moto alla Poinsot 17 A Gli integrali ellittici e le funzioni ellittiche 19 A.1 Gli integrali ellittici . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 A.2 Le funzioni ellittiche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 Bibliografia 22 2 1 Cinematica rigida In questo paragrafo passiamo in rassegna due concetti molto semplici di cinematica del corpo rigido, le rotazioni infinitesime e gli angoli di Eulero. Le prime saranno utili per derivare le equazioni di Eulero del corpo rigido, brevemente discusse nel penultimo paragrafo, mentre invece gli angoli di Eulero sono indispensabili per la trattazione del problema della trottola. 1.1 Rotazioni infinitesime Come è ben noto, una rotazione è una trasformazione ortogonale. Una rotazione infinitesima altro non è che una rotazione, in cui a suo seguito le componenti di un vettore cambiano di quantità infinitesime. Sotto una trasformazione infinitesima, rappresentata da una matrice A, un vettore si trasforma come x0 = Ax. Se la trasformazione è infinitesima, essa sarà una piccola variazione dalla matrice identità, quindi indicando con una matrice di rotazione i cui elementi siano infinitesimi A=1+ Sempre al primo ordine, la matrice inversa vale A−1 = 1 − , essendo la matrice trasposta uguale all’inversa abbiamo ˜ = − Ossia, la matrice è antisimmetrica. Una matrice antisimmetrica di dimensione n è individuata da n(n − 1)/2 parametri, in particolare, gli elementi diagonali sono identicamente nulli, senza perdere generalità possiamo assumere questa matrice della forma 0 −Ω3 Ω2 0 −Ω1 = Ω3 −Ω2 Ω1 0 Da cui notiamo subito che l’incremento dr = r di un vettore è esprimibile come un prodotto vettoriale, in quanto dr = r × dΩ. Questa relazione ci permette di derivare una utilissima formula per esprimere la derivata di un vettore solidale ad un corpo rigido rotante rispetto ad un riferimento fisso (e viceversa). Consideriamo un vettore arbitrario G. La i-esima componente di G nel riferimento fisso, Gi è legata alle altre componenti nel riferiemnto solidale da una matrice di rotazione, quindi Gi = ãij G0j = aji G0j dove le componenti primate si riferiscono al sistema mobile. Consideriamo la variazione di Gi , differenziando abbiamo dGi = aji dG0j + daji dG0j Se all’inizio i due riferimenti coincidono, le componenti del vettore espresse nei due riferimenti saranno eguali Gi = G0i , mentre in generale non potremmo dire lo stesso sui differenziali. Infatti se la rotazione è infinitesima, la matrice di trasformazione si allontanerà poco dalla matrice identità, segue quindi per il differenziale della matrice daji = ˜ij = −ji 3 Gli elementi della matrice possono essere scritti in termini del tensore di Levi-Civita, ij = ijk dΩk , ottenendo dGi = dG0 + ijk dΩk Gj Come già visto in precedenza, questa relazione è possibile scriverla in forma di prodotto vettoriale, in definitiva derivando rispetto al tempo e sfruttando l’arbitrarietà del vettore utilizzato otteniamo la formula d d = + ω× (1) dt f dt s Dove è stato posto ω ≡ 1.2 dΩ . dt Gli angoli di Eulero In generale, la cinematica della rotazione di un corpo rigido tratta lo studio delle leggi di trasformazione di un sistema di coordinate mobili rispetto ad un sistema di coordinate fisso. Dato che siamo interessati ai moti puramente rotatori, la trattazione che faremo non perde generalità se ipotizziamo che i due sistemi di coordinate abbiamo in comune le due origini. Nello spazio tridimensionale, una rotazione è parametrizzata da tre variabili. Nel più comune dei casi questi sono gli angoli che gli assi del nuovo sistema di coordinate formano rispetto agli stessi assi del sistema fisso. Questo modo di parametrizzare le rotazioni non ci sarà di aiuto, per questo utilizzeremo i cosı̀ detti angoli di Eulero. Formalizziamo tutto questo: definiamo un sistema di coordinate cartesiane Oxyz ed il sistema Ωξηζ, inizialmente i due sistemi coincidono. Gli angoli di Eulero possono essere definiti da tre rotazioni, (eseguite nell’ordine preciso) del sistema Ωξηζ rispetto al sistema Oxyz. Iniziamo: facciamo compiere al sistema Ωξηζ una rotazione antioraria dell’angolo ϕ attorno all’asse z, questa rotazione definisce l’angolo ϕ. Adesso ruotiamo in senso antiorario rispetto all’asse ξ dell’angolo θ il sistema appena ottenuto, questa rotazione specifica l’angolo θ. Il piano mobile ξη taglia sul piano xy una retta coincidente con l’asse ξ, tale retta viene chiamata linea dei nodi. Adesso compiamo una rotazione antioraria dell’angolo ψ attorno all’asse ζ appena ottenuto. Queste tre rotazioni specificano gli angoli di Eulero θ, ϕ, ψ (in figura 1 è riportata la costruzione geometrica appena discussa). Queste sono le tre coordinate che individuano la rotazione, pertanto saranno le nostre coordinate generalizzate. Adesso che abbiamo definito gli angoli di Eulero, vogliamo capire come esprimere la velocità angolare del corpo rigido nel riferimento mobile in termini delle velocità angolari θ̇, ϕ̇, ψ̇ e degli angoli di Eulero. Possiamo procedere in due modi, uno di questi consiste nel ricavare le matrici di rotazione delle trasformazioni che determinano gli angoli di Eulero, che è il metodo generale, seguito da Goldstein in [1]. Questo è un esercizio abbastanza calcoloso, cosı̀ viene lasciato al lettore. Senza entrare troppo nei dettagli, possiamo seguire la strada di Landau in [2], quindi il vettore velocità angolare ω del corpo rigido espresso nel riferimento mobile in termini degli angoli di Eulero vale ω1 = ϕ̇ sin θ sin ψ + θ̇ cos ψ ω2 = ϕ̇ sin θ cos ψ − θ̇ sin ψ ω3 = ϕ̇ cos θ + ψ̇ La dimostrazione di queste relazioni è ovvia, basta semplicemente osservare che θ̇ è diretto lungo la linea dei nodi, ϕ̇ lungo l’asse verticale z e ψ̇ lungo l’asse ζ del corpo rigido. Proiettando le componenti di questi vettori lungo gli assi ξηζ si dimostra l’asserto. 4 Figura 1: Gli angoli di Eulero 2 La trottola di Lagrange Con trottola di Lagrange intendiamo un oggetto di forma simmetrica soggetto ad un campo gravitazionale uniforme, in cui un punto del suo asse di simmetria è fisso nel riferimento solidale al laboratorio. Per il fatto di essere immerso in un campo gravitazionale, questo sistema viene spesso indicato con trottola pesante. La trottola che stiamo descrivendo è un corpo dotato di simmetria, quindi due autovalori del momento di inerzia coincidono, in generale soddisfano la relazione J1 = J2 6= J3 L’energia cinetica di questo sistema è ovviamente1 T = I3 I1 2 I3 I1 (ω1 + ω22 ) + ω32 = (θ̇2 + ϕ̇2 sin2 θ) + (ψ̇ + ϕ̇ cos θ)2 2 2 2 2 dove è stato posto I1 = I2 = J1 + M l2 , I3 ≡ J3 . Sappiamo che per un corpo rigido di massa M , l’azione della gravità la possiamo vedere come l’azione di una forza M g agente sul centro di massa, indicando con l la distanza del centro di massa (il quale sarà situato sull’asse di simmetria) dal punto di contatto, l’energia potenziale è V (θ) = M gl cos θ. A questo punto è immediato trovare la Lagrangiana, infatti essa vale L(ψ, ϕ, θ, ψ̇, ϕ̇, θ̇) = T − V L(ψ, ϕ, θ, ψ̇, ϕ̇, θ̇) = I1 2 I3 (θ̇ + ϕ̇2 sin2 θ) + (ψ̇ + ϕ̇ cos θ)2 − M gl cos θ 2 2 si nota subito che L(ψ, ϕ, θ, ψ̇, ϕ̇, θ̇) = L(θ, ψ̇, ϕ̇, θ̇), ossia le coordinate generalizzate ψ e ϕ sono cicliche, pertanto dalle equazioni di Eulero-Lagrange si ha subito la conservazione 1 Ad essere precisi al posto di I1 si deve sostituire I1 + M l2 , in quanto la rotazione avviene per una asse passante per il punto di contatto. 5 dei momenti canonici ad esse coniugati pψ e pϕ . Inoltre l’Hamiltoniana corrispondente non dipende esplicitamente dal tempo di conseguenza abbiamo invarianza per traslazioni temporali, ossia la conservazione dell’energia meccanica totale E = T + V . Gli integrali del moto sono ∂L = I3 (ψ̇ + ϕ̇ cos θ) (2a) pψ = ∂ ψ̇ ∂L pϕ = = (I1 sin2 θ + I3 cos2 θ)ϕ̇ + I3 ψ̇ cos θ (2b) ∂ ϕ̇ 2 E = I1 (θ̇2 + ϕ̇2 sin2 θ) + I3 ω3 + M gl cos θ (2c) 2 2 Per comodità algebriche introduciamo due costanti a e b definite in modo che pψ ≡ I1 a e pϕ ≡ I1 b Esplicitando ψ̇ dalla relazione 2a e sostituendo nella 2b si trova una espressione per ϕ̇ indipendente da ψ b − a cos θ ϕ̇ = (3) sin2 θ Sostituendo questo risultato nella 2b si ottiene una equazione analoga per ψ̇ in funzione del solo angolo θ b − a cos θ I1 ψ̇ = a − cos θ (4) I3 sin2 θ Queste ultime due relazioni sostituite nella 2c permettono di ottenere una equazione di moto nella sola variabile θ, ottenendo E− I3 2 I1 θ̇2 I1 (b − a cos θ)2 ω = + + M gl cos θ 2 3 2 2 sin2 θ Quindi il problema tridimensionale della trottola è ridotto ad un problema di moto unidimensionale. Precisamente, la rotazione di un corpo di momento di inerzia I1 in un potenziale efficace I1 (b − a cos θ)2 + M gl cos θ (5) U (θ) = 2 sin2 θ Quindi l’equazione del moto è θ̈ + 2M gl (b − a cos θ)2 sin θ = −∂θ I1 sin2 θ Altro non è che l’equazione del moto di un pendolo fisico forzato. La soluzione dell’equazione del moto per θ(t) potrebbe essere sostituita nelle espressioni 3 e 4 ed ottenere per diretta integrazione di due equazioni differenziali del primo ordine le funzioni ϕ(t) e ψ(t). Si osserva che il moto della trottola è definito da quattro parametri, tre dei quali sono gli integrali del moto pψ , pϕ e E, fissati dalle condizioni iniziali. L’altro parametro è M gl. Risulterà molto conveniente ridurre questi parametri in quattro costanti 6 normalizzate 2E − I3 ω32 α≡ I1 2M gl β ≡ I1 p ψ a≡ I1 p b ≡ ϕ I1 (6a) (6b) (6c) (6d) È immediato verificare che i primi due parametri hanno le dimensioni di una frequenza angolare al quadrato, mentre i restanti due hanno le dimensioni di una frequenza angolare. In queste nuove variabili l’equazione di conservazione dell’energia assume la forma più semplice (b − a cos θ)2 + β cos θ (7) α = θ̇2 + sin2 θ A questo punto conviene eliminare le funzioni trigonometriche mediante un cambio di variabili, introducendo la variabile u = cos θ, la relazione 7 diviene u̇2 = (1 − u2 )(α − βu) − (b − au)2 L’equazione è diventata del tipo u̇2 = f (u), ma essendo f (u) un polinomio completo del terzo grado, la soluzione generale è esprimibile per quadrature per mezzo degli integrali ellittici; similmente al problema del corpo rigido in rotazione libera. Inevitabilmente a questo livello la trattazione si complica. Risolvere per quadrature ed inversioni tramite gli integrali ellittici è solo una laboriosa complicazione che insegna pochissima fisica. In questa trattazione ci accontentiamo di fornire una analisi più qualitativa, nel seguito in certe approssimazioni riusciremo a portare avanti i calcoli con una analisi quantitativa. Analisi del moto Per capire il moto della trottola occorre studiare le proprietà del polinomio f (u) = (1 − u2 )(α − βu) − (b − au)2 = (α − b2 ) + (2ab − β)u − (α + a2 )u2 + βu3 Come prima osservazione notiamo che per una trottola2 , il centro di massa non concide con il punto fisso, ossia l > 0, da cui segue che β > 0, pertanto il polinomio f (u) è cubico. Per trarre delle conclusioni sul sistema dinamico unidimensionale p (8) u̇ = f (u) È indispensabile trovare le radici del polinomio f (u), al variare dei parametri α, β, a, b. Questo perché le regioni fisicamente ammissibili per il moto sono quelle in cui f (u) > 0; saranno proprio le radici del polinomio a confinare il moto. La casistica completa include tre casi, una radice reale e due complesse coniugate, tre soluzioni reali di cui due coincidenti ed infine tre radici reali distinte. Naturalmente le radici ui del polinomio sono sottoposte al vincolo fisico che |ui | ≤ 1 affinché u sia il coseno di un angolo, inoltre se la trottola è appoggiata sul piano cos θ = u > 0. 2 Nel caso di un giroscopio β = 0 per cui il polinomio è quadratico. 7 Ovviamente si ha limu→±∞ f (u) = ±∞ e f (±1) = −(b ∓ a)2 . Questi fatti uniti alla continuità del polinomio su tutto R bastano a garantire (per il teorema degli zeri) che esiste almeno una radice nell’intervallo [1, +∞). Quindi esiste una radice reale u3 > 1 fisicamente non accettabile (eccetto il caso u3 = 1). Nel caso rappresentato in figura abbiamo u3 > 1 e le restanti due radici comprese tra p zero ed uno. Nell’intervallo u1 < cos θ < u2 la funzione f (u) esiste ed è ben definita, quindi la trottola si muove in modo che θ sia sempre compreso tra due angoli limite, θ2 = arccos u2 e θ1 = arccos u1 . Un modo molto semplice per rappresentare il moto, è quello di tracciare la curva di intersezione tra l’asse della trottola con una sfera unitaria centrata nel punto fisso. La curva che si ottiene viene chiamata luogo geometrico dell’asse di figura. Tale curva risulta parametrizzata dai due angoli di Eulero θ, ϕ. Come abbiamo appena visto il luogo geometrico è compreso tra le due circonferenze di colatitudine θ1 e θ2 . Per uno studio qualitativo è sufficiente notare che il luogo geometrico dell’asse è fortemente influenzato dal segno di ϕ̇. Riscrivendo la relazione 3 in termini della variabile u si ha b − au (9) ϕ̇ = 1 − u2 Il valore critico che discrimina il segno di ϕ̇ è la radice u0 del polinomio b − au, essa vale b a Il luogo geometrico dell’asse descrive curve qualitativamente molto diverse al variare del parametro b/a. In particolare possono presentarsi tre tipi di moti: u0 = • Caso a) Sia u0 > u2 , in questo caso il segno di ϕ̇ resta costante durante il moto. Questo significa che l’angolo ϕ cresce indefinitamente, perciò l’asse della trottola compie un moto di precessione attorno alla verticale. Ovviamente le velocità di precessione non è costante, ma dipende dalla inclinazione istantanea θ. In aggiunta a questo, l’asse della trottola oscilla verticalmente tra le due circonferenze limite, quindi la precessione è accompagnata da una nutazione. In questo caso il luogo geometrico descrive una curva regolare oscillante (qualitativamente) simile ad una sinusiode, come riportato in Fig.2 • Caso b) Se u0 ∈ (u1 , u2 ) il segno di ϕ̇ cambia nel tempo, e con esso la direzione di precessione. Si vede subito che in corrispondenza della circonferenza inferiore θ1 = arccos u1 la velocità di precessione è positiva, mentre sulla circonferenza superiore θ2 = arccos u2 la velocità di precessione ha il segno opposto. Geometricamente il luogo geometrico presenterà degli anelli, simili a fiocchi, come riportato in Fig.2. Ovviamente nei “punti di fiocco” , (i punti a X) la velocità di precessione è nulla, questo avviene alla colatitudine θ̃ = arccos(b/a). • Caso c) Se u0 coincide con una delle radici del polinomio f (u), dalle equazioni 8 e 9 si nota che sia θ̇ che ϕ̇ si annullano, come si vede in Fig.2 il luogo geometrico presenterà delle cuspidi. 8 Figura 2: Tipologie del luogo geometrico al variare di b/a. Osservazioni Il terzo caso può sembrare di difficile realizzazione pratica. In realtà basta scegliere delle opportune condizioni iniziali per instaurare tale moto. Ad esempio consideriamo una trottola tale che al tempo t = 0 è in rotazione attorno al suo asse, inizialmente mantenuto fisso con inclinazione θ0 rispetto alla verticale, evidentemente si ha θ̇ = ϕ̇ = 0. Definendo u0 = cos θ0 , con queste condizioni dalla equazione 3 si ha u0 = u0 = 2.1 b a (10) La trottola veloce L’approssimazione di trottola veloce permette di trarre conclusioni di carattere quantitativo sul moto della trottola senza integrare l’equazione 8. L’energia di rotazione della I ω2 trottola attorno al suo asse è 32 3 mentre la massima energia potenziale vale M gl. Se l’energia cinetica di rotazione è molto più grande dell’energia potenziale si parla di trottola veloce, in questa approssimazione: I3 ω32 M gl 2 Anche in questo caso consideriamo le condizioni iniziali viste nel paragrafo precedente. Dalla legge di conservazione dell’energia 2c si ha E− Moltiplicando questa equazione per I3 ω32 = M gl cos θ0 2 2 I1 si ottiene la relazione non banale α = βu0 Questa ultima relazione unita alla 10 consente di fattorizzare il polinomio f (u), trovando f (u) = (u0 − u)[β(1 − u2 ) − a2 (u0 − u)] (11) In questa forma si vede subito che le radici di f (u) diverse da u0 sono radici della espressione nelle parentesi quadre, in particolare sappiamo che u1 ne è soluzione, quindi ponendo a2 p≡ − 2 cos θ0 e q ≡ sin2 θ0 β 9 e definendo le ampiezze u − u0 ≡ x e u − u1 ≡ x1 si ha l’equazione quadratica x21 + px1 − q = 0 la cui soluzione fisicamente accettabile è p p2 + 4q − p x1 = 2 Da notare che il rapporto I3 I3 ω32 a2 = β I1 2M gl è direttamente connesso al rapporto tra l’energia cinetica di rotazione e l’energia potenziale. Fatta eccezione delle trottole con I3 I1 , corrispondenti alla insolita forma di sigaro, la condizione di trottola veloce implica a2 1 β In questa approssimazione possiamo sviluppare in serie di potenze la soluzione per x1 ottenendo 2 q q x1 = + O p p3 Trascurando i termini di ordine superiore in q/p abbiamo con ottima approssimazione x1 = a2 β β I1 2M gl 2 sin2 θ0 ≈ 2 sin2 θ0 = sin θ0 a I3 I3 ω32 − 2 cos θ0 Questa espressione è l’ampiezza3 della nutazione, si osserva subito che tanto più grande è la velocità angolare della trottola, tanto più è piccola l’ampiezza della nutazione. L’espressione 9 può essere leggermente semplificata, tenendo presente che l’ampiezza di nutazione è piccola, quindi 1 − u2 ' sin2 θ0 , per cui otteniamo il sistema dinamico ẋ2 = a2 x(x1 − x) Effettuando una traslazione della coordinata x ponendo ζ = x − x1 2 si trova ζ̈ + a2 ζ = 0 (12) da cui abbiamo la frequenza di nutazione a= I3 ω3 I1 L’equazione 12 è l’equazione di un oscillatore armonico con posizione di equilibrio il punto ζ = 0, pertanto con le condizioni iniziali scelte la soluzione è x(t) = 3 x1 (1 − cos at) 2 Si ricorda che la vera ampiezza è un angolo, mentre x1 è la differenza fra due coseni. 10 (13) che sostituita nella equazione 3 fornisce b − au b − au0 a(u − u0 ) x ϕ̇ = ≈ = ≈ 2 2 2 sin θ sin θ0 sin θ0 sin2 θ0 Infine si ha la velocità di precessione β ϕ̇ = (1 − cos at) (14) 2a Come già anticipato essa non è uniforme, ma oscilla nel tempo. Quello che possiamo dire è che la velocità di precessione media della trottola è non nulla, in quanto M gl h ϕ̇ i = I3 ω3 Commenti Il caso da noi risolto, in cui l’asse della trottola è inizialmente in quiete ci permette di trarre delle conclusioni sul moto globale. Appena l’asse è libero di muoversi, esso cade per azione della gravità. Il momento delle forze relativo all’asse genera una velocità di precessione direttamente proporzionale alla ampiezza dell’angolo di caduta. L’asse inizierà a muoversi in una regione compresa tra due calotte sferiche. Il moto di caduta nella gravità diventa una nutazione accompagnata da una precessione. Un aspetto molto importante riguarda l’entità dei due effetti. Dalla relazione 13 si vede subito che l’ampiezza di nutazione decresce con il quadrato della velocità angolare ω3 , mentre la frequenza di precessione è uguale alla frequenza di nutazione, come si vede dalla 13 e 14. Inoltre dalla 13 si vede che la frequenza di nutazione cresce linearmente con la velocità angolare. Perciò in approssimazione di trottola veloce, il moto di nutazione è senz’altro una piccola perturbazione del moto di precessione. Quindi per una trottola sufficientemente veloce, il moto di nutazione è quasi inesistente4 , per questo sembra essere una precessione uniforme attorno all’asse verticale. Questa uniformità è vera solo in apparenza, in questo caso si parla di precessione pseudoregolare. 2.2 Una tecnica alternativa Esiste un secondo approccio al problema della trottola veloce, ampiamente trattato da Arnol’d in [4]. Grazie alle leggi di scala sappiamo che all’aumentare di N volte la velocità angolare è esattamente equivalente a diminuire il peso di N 2 volte. Formalizziamo meglio: Teorema (di Arnold). Se conservando la posizione iniziale della trottola, si aumenta di N volte la velocità angolare, la traiettoria della trottola sarà esattamente la stessa, che se l’accelerazione di gravità g fosse diminuita di N 2 volte, mentre la velocità angolare rimane la stessa. Inoltre, nel caso di una maggiore velocità angolare la traiettoria, naturalmente, viene percorsa N volte più velocemente. Se Ξg (t, ξ) è la posizione della trottola all’istante t con condizioni iniziali ξ sottoposta alla gravità g, il teorema afferma che Ξg (t, N ξ) = ΞN −2 g (N t, ξ) Grazie a questo teorema, anziché prendere in esame l’approssimazione I3 ω32 M gl 2 ci basta studiare il caso g → 0. Per ulteriori dettagli sull’uso di questa tecnica si rimanda al libro di Arnold, più volte citato. 4 Anche perché gli attriti con il perno contribuiscono in modo notevole al suo smorzamento. 11 2.3 La precessione regolare Come abbiamo appena visto, in generale la velocità di precessione oscilla nel tempo. Quello che ci chiediamo è: sotto quali condizioni il moto della trottola è una pura precessione? Ovviamente per una precessione regolare, due radici del polinomio collassano in una sola, θ1 = θ2 = θ0 Quindi l’angolo θ rimane fissato durante tutto il moto, il luogo geometrico è semplicemente una circonferenza e la nutazione è del tutto rimossa. Tradotto in termini matematici, il polinomio f (u) deve avere una radice a molteplicità doppia. Per cui dobbiamo ricercare le condizioni in cui df u̇2 = f (u0 ) = 0 e =0 du u0 Imponendo che u0 sia radice del polinomio f (u) e della sua derivata, sfruttando l’equazione per ϕ̇ troviamo β = aϕ̇ − ϕ̇2 cos θ0 2 È comodo riscrivere questa ultima relazione eliminando a in favore di ω3 , ricordando che a = II13 ω3 , si ottiene M gl = ϕ̇(I3 ω3 − I1 ϕ̇ cos θ0 ) (15) Affinché si abbia una precessione regolare, i quattro parametri iniziali non possono essere del tutto arbitrari. La natura quadratica della relazione 15 impone il vincolo che ϕ̇ sia reale; condizione affinché questo avvenga è che il determinante della equazione 15 sia non negativo, perciò I32 ω32 > 4M glI1 cos θ0 Abbiamo dimostrato che la precessione regolare avviene solo se la velocità di rotazione ω3 è superiore ad un certo valore critico Ω3 Ω3 = 2p M glI1 cos θ0 I3 (16) È interessante notare che l’equazione 15 ammette due soluzioni (fisicamente accettabili se ω3 > Ω3 ), quindi il regime di precessione regolare può instaurarsi oltre il limite critico, e può avvenire su due velocità diverse. Per capire meglio questo fenomeno basta osservare che nel limite I3 ϕ̇ ω3 I1 il termine quadratico si trascura e si ha ϕ̇lenta ≈ M gl I3 ω3 Questa è la velocità di precessione regolare lenta, da notare che è la stessa velocità media ricavata nel caso di precessione pseudoregolare. Nel limite in cui si trascura il termine M gl rispetto ai termini del membro a destra della equazione 15 si trova la velocità di precessione veloce I3 ω3 ϕ̇veloce ≈ I1 cos θ0 12 Ovviamente queste due soluzioni si possono ottenere anche dalla soluzione generale della equazione 15 q I3 2 2 ϕ̇ = ω3 ± ω3 − Ω3 2I1 cos θ0 Nel limite di alta velocità di rotazione ω3 Ω3 sviluppando all’ordine più piccolo in Banalmente si trova 4 Ω3 I3 ω3 Ω23 ϕ̇lenta/veloce = 1∓1± 2 +O 2I1 cos θ0 ω3 ω34 Ω3 . ω3 Da notare che la velocità di precessione veloce è tanto più veloce di quella lenta, quanto più la velocità angolare ω3 è maggiore della velocità angolare critica, infatti p ω3 + ω32 − Ω23 ϕ̇veloce ω32 p = 4 = + O(1) ϕ̇lenta Ω23 ω3 − ω32 − Ω23 2.4 Trottola verticale Nel primo paragrafo abbiamo visto come il moto di nutazione della trottola sia confinato tra due angoli limite. Poi abbiamo visto che se i due angoli coincidono, il moto di nutazione viene rimosso e il luogo geometrico diviene una circonferenza sottesa all’angolo θ0 . L’ultimo caso da trattare è quello che accade se la trottola viene messa in rotazione verticale, ossia se l’angolo θ0 = 0. Sotto quali condizioni si può verificare un moto di rotazione puramente verticale? In tal caso, abbiamo stabilità del moto? La singolarità di questo caso risiede nel fatto che l’asse di figura coincide con l’asse verticale, pertanto, solo in questo caso pψ = I1 a = I1 b = pϕ , quindi a = b. Per questa configurazione dalla equazione dell’energia abbiamo E − I23 ω32 = M gl, quindi α = β. Quindi il polinomio f (u) si semplifica e diventa u̇2 = β(1 − u2 )(1 − u) − a2 (1 − u)2 = (1 − u)2 [β(1 + u) − a2 ] Le radici di questo polinomio sono, ovviamente u = 1 a molteplicità doppia e u3 = a2 −1 β Notiamo che se a2 /β > 2 (sicuramente valida per una trottola veloce) abbiamo u3 > 1, quindi l’unico moto possibile è quello tale per cui u = 1. In questo caso una trottola inizialmente verticale resta tale. Se invece a2 /β < 2 abbiamo u3 < 1, quindi la trottola compie un moto di nutazione fra θ = 0 e θ = θ3 = arccos u3 . Concludiamo subito che tra il primo ed il secondo caso deve esistere una velocità angolare di soglia, oltre la quale è possibile un moto con asse puramente verticale. Per verificare questa condizione basta far sı̀ che il polinomio abbia come radice u = 1 con triplice molteplicità, ossia 2= a2 I3 I3 Ω2 = β I1 2M gl quindi Ω2 = 4M glI1 I32 13 (17) Da notare che questa espressione appena ricavata per la velocità critica si sarebbe potuta ottenere ponendo θ = 0 nella 16. Da notare che questo valore di soglia si può ottenere5 semplicemente osservando che il potenziale efficace 5 può essere approssimato, per piccoli scostamenti dalla verticale6 , con 2 2 I3 ω3 M gl − θ2 + O(θ4 ) U (θ) = U0 + 8I1 2 La condizione di stabilità si traduce nella positività del termine tra parentesi, da cui si ottiene la 17. Commenti Il significato di quanto ricavato è il seguente: se la trottola è messa in moto attorno al suo asse verticale con velocità angolare ω3 > Ω, essa continuerà a ruotare attorno alla verticale. In questo caso si parla di trottola dormiente. In un caso realistico, gli effetti di attrito dovuti principalmente al perno di rotazione, portano la velocità di rotazione al di sotto del valore critico; la trottola si “sveglierà”, iniziando ad oscillare sempre più fino alla totale destabilizzazione del moto e all’arresto. 3 Le equazioni di Eulero L’approccio allo studio della dinamica del corpo rigido secondo Newton, conduce alle cosı̀ dette equazioni di Eulero. Queste equazioni descrivono l’evoluzione temporale del momento angolare del corpo rigido in un riferimento fisso. Applicando l’equazione 1 vediamo che la variazione nel tempo del momento angolare è dL dL = +ω×L dt f dt s dove i pedici f e s stanno ad indicare che le derivate sono calcolate nel riferimento fisso e solidale al corpo rispettivamente. Ma dalla seconda equazione cardinale della dinamica sappiamo che la variazione temporale del momento angolare è dovuta al momento delle forze τ (scegliamo il polo fisso), quindi dL =τ dt f Tralasciando l’indice f abbiamo le equazioni di Eulero in forma vettoriale dL +ω×L=τ (18) dt Per un corpo rigido, esiste una relazione ben precisa tra momento angolare e velocità angolare L = I · ω, dove I è il tensore di inerzia. Questa relazione tensoriale si semplifica ulteriormente se riferiamo gli assi del corpo con gli assi principali di inerzia, cioè diagonalizzando il tensore, ed ottenendo per la i-esima componente Li = Ii ωi . Scritte in questo particolare riferimento, le equazioni di Eulero assumono la forma7 Ii dωi + ijk ωj ωk Ik = τi dt 5 i = 1, 2, 3 Vedi ad esempio [2] oppure [4]. Affinché lo sviluppo in serie di potenze abbia senso deve sussistere a = b. 7 Da notare che i non è un indice di somma, mentre j e k lo sono. 6 14 Questa forma indiciale riassume le tre equazioni 18, che proiettate sono I1 ω̇1 − ω2 ω3 (I2 − I3 ) = τ1 I2 ω̇2 − ω3 ω1 (I3 − I1 ) = τ2 I3 ω̇3 − ω1 ω1 (I1 − I2 ) = τ3 (19a) (19b) (19c) La soluzione di queste equazioni è tutt’altro che banale, nell’ultimo paragrafo risolveremo questo sistema, nel caso di assenza di momenti esterni. Per adesso notiamo che per un giroscopio, ossia un corpo simmetrico con I1 = I2 6= I3 non soggetto a momenti esterni, queste equazioni implicano la costanza di ω3 . Le altre due equazioni costituiscono un sistema di equazioni differenziali del primo ordine accoppiato. La soluzione diviene banale se si disaccoppia il sistema, trovando che le velocità angolari ω1 e ω2 descrivono un moto armonico, ossia si ha una precessione. Si lascia per esercizio dimostrare che la frequenza di precessione in esame è I3 − I1 Ω= ω3 I1 4 La trottola asimmetrica Le equazioni di Eulero viste nel secondo paragrafo, non si prestano ad una semplice trattazione, anche perché per integrarle occorre far ricorso alle funzioni ellittiche8 . In questo paragrafo, (letteralmente tratto dal §37 di [2]) affrontiamo il problema della rotazione libera9 , ossia la rotazione di un corpo tridimensionale complesso non soggetto a forze esterne e a momenti esterni. Per un corpo arbitrario i tre autovalori del tensore di inerzia saranno in generale distinti; assumiamo che soddisfino I1 < I2 < I3 Senza troppa difficoltà, osserviamo che esistono due integrali primi delle equazioni di Eulero, essi sono l’energia E ed il modulo del momento angolare L. Essi valgono I1 Ω21 + I2 Ω22 + I3 Ω23 = 2E e I12 Ω21 + I22 Ω22 + I32 Ω23 = L2 Esprimendo queste due equazioni in termini delle componenti del momento angolare Li = Ii Ωi , abbiamo L21 L22 L23 + + = 2E I1 I2 I3 L21 + L22 + L23 = L2 Se riportiamo in un sistema di assi cartesiani le componenti del momento angolare, le due equazioni appena viste descrivono due superfici √ chiuse, in particolare, la conservazione dell’energia descrive un ellissoide di semiassi 2EIi , mentre l’altra equazione descrive una sfera di raggio L. Ovviamente il vettore L potrà assumere diversi orientamenti rispetto agli assi principali. Le linee di intersezione10 tra queste due superfici sono le curve tracciate dal vettore momento angolare. La figura riporta le linee di intersezione 8 Nella appendice è possibile trovare una breve esposizione sulle funzioni ellittiche. Spesso parleremo di moto libero e moto per inerzia, riferendoci sempre ad un sistema in cui è nullo sia il risultante delle forze esterne che dei momenti esterni. √ √ 10 L’intersezione è garantita per costruzione dalla disuguaglianza 2EI1 < L < 2EI3 9 15 Figura 3: Traiettorie delle equazioni di Eulero sulla superficie di livello di energia. tra l’equazione di conservazione dell’energia e del momento√angolare. Le varie curve riportate dipendono dall’entità della grandezza L. Per L & 2EI1 l’intersezione è data da curve chiuse centrate attorno ai poli, in corrispondenza dell’asse x1 .√Mano a mano che il valore di L aumenta, tali curve si allargano, fino a che per L = 2EI2 le curve dell’emisfero superiore e dell’emisfero inferiore diventano ellissi, con punti in comune lungo l’asse x2 . Per valori ancora più grandi, √ le ellissi si separano formano delle curve chiuse centrate attorno all’asse x3 ; per L . 2EI3 tali curve si restringono ai poli lungo l’asse x3 . La periodicità del moto è assicurata dal fatto che esistono orbite chiuse. Come si vede dalla Fig.3, la stabilità del moto è garantita solo attorno agli assi in cui il momento di inerzia assume valori estremi. Quindi la rotazione è stabile solo attorno agli assi x1 e x3 , mentre è instabile attorno all’asse x2 . Dalle equazioni di Eulero è possibile ricavare le equazioni di evoluzione temporale per le velocità angolari. Ad esempio, possiamo trovare Ω2 esprimendo Ω1 e Ω3 in termini di Ω2 , dei momenti di inerzia e delle costanti E, L. In particolare otteniamo q 1 dΩ2 = √ [(2EI3 − L2 ) − I2 (I3 − I2 )Ω22 ][(L2 − 2EI1 ) − I2 (I2 − I1 )Ω22 ] dt I2 I1 I3 introducendo le variabili ridotte11 s, τ ed il modulo κ s s 2 (I3 − I2 )(L − 2EI1 ) I2 (I3 − I2 ) τ= , s = Ω2 I1 I2 I3 2EI3 − L2 s , κ= (I2 − I1 )(2EI3 − L2 ) (I3 − I2 )(M32 − 2EI1 ) Risolviamo l’equazione per t(Ω2 ) imponendo che al tempo iniziale Ω2 (0) = 0, ottenendo un integrale ellittico di prima specie Z s ds p τ= (1 − s2 )(1 − κ2 s2 ) 0 11 Ovviamente si deve avere M 2 > 2EI1 per l’esistenza di τ . 16 È possibile invertire questo integrale tramite la funzione ellittica seno amplitudine s = sn τ . Ripetendo il ragionamento è possibile dimostrare che le altre velocità valgono s s s 2 2 2EI3 − L 2EI3 − L L2 − 2EI1 Ω1 = cn τ , Ω2 = sn τ , Ω3 = dn τ I1 (I3 − I1 ) I2 (I3 − I2 ) I3 (I3 − I1 ) Le funzioni ellittiche sono periodiche, il loro periodo è dato dall’integrale ellittico completo di prima specie, quindi il periodo del moto è T s I1 I2 I3 T = 4K(κ) (I3 − I2 )(L2 − 2EI1 ) Da notare che per un rotore simmetrico I1 = I2 , quindi si ha κ = 0, cosı̀ le funzioni ellittiche diventano funzioni circolari, riconducendoci alla precessione di un giroscopio, vista nel precedente paragrafo. Fissando le condizioni iniziali in modo che L sia diretto lungo l’asse z, dalle equazioni di Eulero è possibile ricavare la legge oraria. Le componenti del momento angolare lungo gli assi mobili, espresse in termini degli angoli di Eulero, sono L sin θ sin ψ = I1 Ω1 , L sin θ cos ψ = I2 Ω2 , L cos θ = I3 Ω3 Ad esempio, per θ troviamo s cos θ = I3 (M 2 − 2EI1 ) dn τ M 2 (I3 − I1 ) √ Da sottolineare che per L = 2EI3 , si ha Ω = (0, 0, Ω3 ), ossia una rotazione uniforme attorno all’asse x3 ; similmente si ripete il ragionamento per l’asse x1 . 5 Il moto alla Poinsot Come abbiamo visto, è assai laborioso risolvere le equazioni di Eulero per una rotazione libera. Tuttavia esiste un altro approccio molto elegante, nel quale non si fa ricorso alla soluzione analitica delle equazioni di Eulero, ma semplicemente ad una trattazione geometrica del moto rigido. Questo è l’approccio di Poinsot. Nel caso del moto per inerzia, il momento delle forze esterne è nullo, pertanto il vettore L è fisso nello spazio. Si può dimostrare che l’ellissoide di inerzia rotola senza strisciare su un piano fisso, la √ 2E cui normale è parallela a L e la cui distanza dall’origine vale d = L . Inoltre è facile dimostrare che sia nel riferimento fisso che in quello mobile l’asse di rotazione descrive un cono; infine l’asse di rotazione è istante per istante la semiretta comune ai due coni, che rotolano senza strisciare l’uno sull’altro. La dimostrazione di queste asserzioni è semplice, definiamo il vettore ω ω ρ= √ = √ ω I 2T parallelo alla velocità angolare di rotazione, e la funzione F (ρ) = ρ · I · ρ Le superfici di livello di F sono ellissoidi, in particolare la superficie su cui F = 1 è proprio l’ellissoide di inerzia. Quindi abbiamo un vettore che indica la direzione della velocità 17 angolare di rotazione, inoltre sappiamo che questo vettore ha una estremità sull’ellissoide di inerzia. Per capire come è orientato l’ellissoide di inerzia (e quindi il corpo) rispetto al momento angolare, basta osservare che r 2 L ∇ρ F (ρ) = T ossia, la direzione normale all’ellissoide di inerzia in ρ è parallela al momento angolare. Dimostrare la costanza della distanza dall’origine dell’ellissoide al punto di tangenza con il piano invariante è banale: √ 2T L d=ρ· = L L dove si è sfruttato il fatto che l’energia cinetica è T = ω·I2 ·ω , che si conserva. La costanza di L e della distanza del piano tangente dall’origine, unita al fatto che la normale al piano è parallela al momento angolare, fa sı̀ che anche il piano sia fisso, per questo è detto piano invariante. Per provare che il moto è di puro rotolamento, basta osservare che il punto di contatto è definito da ρ il quale appartiene all’asse istantaneo di rotazione. Il vettore ρ descrive una curva sull’ellissoide di inerzia, detta Poloida, la corrispondente curva tracciata sul piano invariante è detta Erpoloida. (Vedi Fig.4) Da notare che per Figura 4: Poloida ed Erpoloida Figura 5: Coni di Poinsot un corpo simmetrico, quando l’ellissoide di inerzia è rotondo, poloida ed erpoloida sono circonferenze. Da qui si capisce subito che per un osservatore solidale al corpo, ω traccia un cono, detto cono del corpo; un osservatore nel riferimento fisso vedrebbe ω tracciare un cono, detto cono dello spazio. Le intersezioni dei coni con l’ellissoide di inerzia sono poloida ed erpoloida. Nella descrizione di Poinsot, il moto di un corpo simmetrico in assenza di forze e momenti è descritto dal rotolamento dei due coni, l’uno sull’altro (vedi Fig 5). 18 A Gli integrali ellittici e le funzioni ellittiche Come spesso accade in fisica-matematica ci si imbatte in equazioni differenziali la cui soluzione non è esprimibile in termini di funzioni elementari, al punto che se ne definiscono delle nuove, dette funzioni speciali. In tutta la enorme zoologia delle funzioni speciali vi sono le funzioni ellittiche di Jacobi. Per poterle definire si introducono gli integrali ellittici12 . A.1 Gli integrali ellittici I seguenti integrali, vengono definiti integrali ellittici di prima, seconda e terza specie rispettivamente, i quali, in forma di Legendre, sono rispettivamente Z φ Z φp dθ p 1 − k 2 sin2 θ dθ e F (φ, k) = , E(φ, k) = 2 2 0 0 1 − k sin θ Z φ dφ p Π(φ, n, k) = 2 1 − k 2 sin2 φ 0 (1 + n sin φ) dove il parametro k detto modulo è tale che k ∈ [0, 1], mentre φ è chiamata ampiezza. Mediante il cambio di variabili t = sin θ, x = sin φ dalla forma di Legendre si ottiene la forma di Jacobi Z x Z x √ 1 − k 2 t2 dt √ √ √ F (x, k) = , E(x, k) = dt e 1 − t2 1 − k 2 t2 1 − t2 0 0 Z x dt p Π(x, n, k) = 2 (1 − nt )(1 − t2 )(1 − k 2 t2 ) 0 Gli integrali ellittici appena definiti vengono detti incompleti. Vengono detti completi se φ = π/2, se in forma di Legendre, se x = 1 se nella forma di Jacobi; essi vengono definiti come K(k) = F (π/2, k) A.2 , E(k) = E(π/2, k) e Π(n, k) = Π(π/2, n, k) Le funzioni ellittiche Evidentemente è possibile definire la funzione trigonometrica sin come un integrale circolare, Z x dt √ u= = sin−1 x 2 1−t 0 Questa definizione definisce u come funzione di x e viceversa invertendo, x = sin u. Nello stesso modo, la funzione u = F (φ, k) definisce u come funzione di φ e viceversa definisce φ come funzione di u, basta invertire l’integrale ellittico Z x dt √ √ u= ≡ sn−1 x 2 2 2 1−t 1−k t 0 12 Per ulteriori dettagli tecnici e per esercizi di carattere meccanico si rimanda a [3]. Una chiara esposizione di queste funzioni, corredata da esercizi matematici e fisici si trova anche in [5]. 19 Questa è la definizione della funzione ellittica sn. Da notare che x = sn u = sin φ poiché x = sin φ. Ricavare l’ampiezza φ dalla funzione u prende il nome di inversione dell’integrale ellittico; tale funzione si indica con φ = am u Le altre funzioni ellittiche si possono definire a partire dalle operazioni trigonometriche su φ; esse sono sn u = sin am u = sin φ cn u = cos am u = sin φ Esse prendono rispettivamente il nome di seno amplitudine e di coseno amplitudine 13 . Esistono altre funzioni ellittiche, tutte riconducibili alla seno amplitudine, esse sono dn u = dφ √ = 1 − k 2 sn2 u du e tn u = sn u = tan φ cn u La funzione dn viene detta delta amplitudine. Le funzioni ellittiche di Jacobi sono definite come le funzioni inverse degli integrali ellittici del primo tipo. Queste funzioni speciali soddisfano delle identità molto simili a quelle delle funzioni trigonometriche sn2 u + cn2 u = 1 dn2 u + k 2 sn2 u = 1 Pertanto le altre funzioni ellittiche, sono riconducibili alla funzione sn. Queste funzioni hanno delle somiglianze intrinseche con le funzioni circolari, in particolare valgono delle regole di derivazione analoghe d sn u = cn u dn u du , d cn u = −sn u dn u du , d dn u = −k 2 sn u cn u du Un’ altra proprietà importante è che nel limite k = 0 le funzioni ellittiche degenerano nelle funzioni circolari trigonometriche sn u = sin u , cn u = cos u , tn u = tan u , dn u = 1 Mentre nel limite opposto k = 1 le funzioni ellittiche degenerano in funzioni iperboliche, perdendo la loro periodicità. Esempio (©) Risolviamo l’equazione del pendolo semplice (vedi [3]) θ̈ + ω 2 sin θ = 0 (20) Moltiplicando per θ̇ l’equazione 20 si nota subito che il sistema ammette un integrale primo, l’energia 1 2 2 ml θ̇ − mgl cos θ = E = costante (21) 2 13 Per mettere in evidenza il fatto che il modulo è k, talvolta le funzioni ellittiche vengono scritte nella forma sn (x, k) ≡ sn (x) Per non appesantire la notazione, scriveremo semplicemente sn sottintendendo che il modulo è k. 20 Quindi l’equazione 21 è integrabile per quadrature. Riscriviamo questa equazione definendo E/mgl ≡ e θ̇2 = 2ω 2 (e + cos θ) Introducendo la variabile y = sin 2θ e, si ottiene l’equazione differenziale y2 2 2 2 2 ẏ = κ ω (1 − y ) 1 − 2 κ (22) dove si è posto κ2 ≡ (1 + e)/2. Poiché stiamo studiando le oscillazioni (e non le pure rotazioni), il parametro |e| < 1, quindi κ2 < 1. L’equazione 22 è integrabile per separazione delle variabili, infatti ponendo y/κ = ξ Z y(t)/κ y0 /κ dξ p p = ω(t − t0 ) 2 (1 − y ) 1 − κ2 ξ 2 (23) Nel caso in cui il pendolo inizi il suo moto dalla posizione θ(t0 ) = 0 si ha y0 = 0, pertanto l’integrale 23 si esprime in termini della funzione seno amplitudine di Jacobi sn−1 y(t) = ω(t − t0 ) κ (24) da cui si ricava la legge oraria θ(t) = 2 sin−1 [κ sn ω(t − t0 )] È facile dimostrare che il periodo di oscillazione vale T = 4K(κ) ω Da questa espressione, espandendo in serie di potenze l’integrale ellittico completo di prima specie si trova s 2 ∞ X l (2j − 1)!! 2j T = 2π 1+ k g (2j)!! j=1 Abbiamo dimostrato che il pendolo semplice non è isocrono, e solo per k → 0 si ritrova la legge di Galileo sull’isocronismo del pendolo. Anche i moti di pura rotazione si possono descrivere in termini di funzioni ellittiche. Per una pura rotazione e > 1, quindi basta ripetere quanto appena visto effettuando la sostituzione k 2 = κ−2 ottenendo 4k K(k) ω(t − t0 ) −1 θ(t) = 2 sin sn e T = k ω Molto più interessante è il moto sulla separatrice, realizzabile ad esempio lanciando il pendolo dalla posizione θ = 0 con energia cinetica pari all’energia potenziale relativa alla sommità, perciò e = 1. In questo caso κ = 1, le funzioni ellittiche degenerano in iperboliche e si ottiene θ(t) = 2 sin−1 tanh[ω(t − t0 )] da cui si vede immediatamente che per arrivare alla sommità il tempo impiegato è infinito. 21 Riferimenti bibliografici [1] H. Goldstein, C. Poole e J. Safko, Meccanica Classica, Zanichelli (2005) Semplicemente un capolavoro, descrive in maniera esaustiva il problema della trottola, queste dispense sono perlopiù tratte letteralmente da questo libro. [2] L. D. Landau e E. M. Lifšits, Meccanica, Editori Riuniti (2004) L’opera omnia di Landau-Lifšits tratta il problema dei rotatori simmetrici, in uno stile impeccabile. Ottima la trattazione del corpo rigido, in tutti i suoi aspetti. [3] A. Fasano e S. Marmi, Meccanica Analitica, Bollati Boringhieri (2002) Il testo di meccanica per eccellenza, elegante e formale. Molto interessante la trattazione della cinematica del corpo rigido. [4] V. I. Arnold, Metodi Matematici della Meccanica Classica, Editori Riuniti (2004) Un classico, unisce gli aspetti geometrici a quelli meccanici. In modo semplice ed elegante affronta il problema del corpo rigido e della trottola (con la stessa notazione di Goldstein). [5] M. L. Boas, Mathematical Methods in the Physical Sciences, Wiley (2006) Il capitolo sulle funzioni speciali contiene una ampia esposizione delle funzioni ellittiche corredando la teoria con esercizi pratici. 22
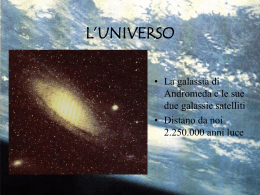
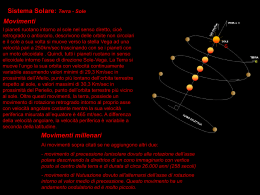
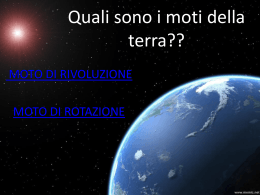
Scarica